Параметрическая идентификация модели объекта управления по переходной функции работающей системы автоматического регулирования

Автор: Панферов Владимир Иванович, Панферов Сергей Владимирович, Халдин Константин Сергеевич
Рубрика: Управление в технических системах
Статья в выпуске: 3 т.19, 2019 года.
Бесплатный доступ
Известно, что динамические свойства промышленных объектов по каналам управления обычно существенно меняются при изменении режима их работы. Поэтому показатели качества регулирования с неизменными настройками автоматических регуляторов тоже изменяются, причем, как правило, ухудшаются в процессе работы агрегатов. В связи с этим возникает задача периодической корректировки параметров настройки регуляторов в контурах работающих систем автоматического регулирования (САР). Указанную задачу можно решить только по фактическим динамическим параметрам эксплуатируемого объекта, поэтому в работе рассматривается задача оценки этих параметров, причем по реальным данным работающей замкнутой системы. При этом используется ступенчатое возмущение либо по заданию, либо со стороны регулирующего органа (по нагрузке), также может быть использована опытная реакция системы на возмущение любого вида по указанным каналам. Объект управления описывается дифференциальным уравнением второго порядка с запаздыванием. Критерий параметрической идентификации квадратичный, либо модульный или минимаксный. Задача идентификации решается с помощью программы, реализующей метод покоординатного спуска, получающиеся при этом задачи одномерной минимизации решаются с помощью подпрограммы, использующей метод золотого сечения. Для численного интегрирования уравнения объекта применяли метод Рунге - Кутты с погрешностью, пропорциональной пятой степени шага по времени. В работе проведена апробация разработанных программ параметрической идентификации по экспериментальным переходным характеристикам САР давления в металлургической печи. Указаны численно-аналитические процедуры настройки регуляторов в САР по найденным параметрам объекта управления.
Автоматический регулятор, качество регулирования, переходная функция, замкнутая система автоматического регулирования, изменчивость характеристик объекта управления, параметрическая идентификация модели, коррекция настроек регулятора
Короткий адрес: https://sciup.org/147232269
IDR: 147232269 | УДК: 621.311.22.011 | DOI: 10.14529/ctcr190305
Parametric identification of the model of object management by transitional function working system automatic regulation
It is known that the dynamic properties of industrial objects in control channels usually change significantly with a change in their mode of operation. Therefore, the indicators of quality of regulation with constant settings of automatic regulators also change, and, as a rule, they deteriorate during the operation of the units. In this connection, the problem arises of periodically adjusting the settings of regulators in the circuits of operating automatic control systems (ATS). This problem can be solved only by the actual dynamic parameters of the object being operated, therefore, the work considers the task of estimating these parameters, and according to the actual data of the operating closed system. In this case, a step perturbation is used either on the instructions or on the part of the regulator (on the load), the experienced reaction of the system to disturbances of any kind along the indicated channels can also be used. The control object is described by a second-order differential equation with delay. The parametric identification criterion is quadratic, either modular or minimax. The identification task is solved with the help of a program that implements the method of coordinate descent, the resulting one-dimensional minimization problems are solved with the help of a subroutine using the golden section method. For the numerical integration of the object equation, the Runge-Kutta method was used with an error proportional to the fifth power of the time step. In this paper, we tested the developed programs for parametric identification based on the experimental transient characteristics of ATS pressure in a metallurgical furnace. The numerical-analytical procedures for adjusting the regulators in the SAR by the found parameters of the control object are indicated.
Текст научной статьи Параметрическая идентификация модели объекта управления по переходной функции работающей системы автоматического регулирования
Постановка задачи
Из литературных и практических данных хорошо известно, что динамические свойства объектов управления по каналам регулирования обычно существенно изменяются при изменении режима их работы, обусловленного, например, изменением характеристик обрабатываемых материалов, темпа производства и т. п. Так, например, в нагревательных и термических печах коэффициент передачи по каналу «расход топлива - температура в зоне» может изменяться в процессе работы печей в несколько раз [1–4]. Изменчивость динамических параметров объектов приводит к тому, что показатели качества регулирования с неизменными настройками автоматических регуляторов тоже изменяются, причем, как правило, ухудшаются в процессе работы. Попытки выявления и использования причинно-следственных связей для отслеживания значений динамических параметров [4, 5] с целью улучшения показателей качества регулирования в целом не решают проблему из-за существенной нестабильности этих взаимосвязей. В этих условиях целесообразно периодически в процессе работы системы автоматического регулирования (САР) определять динамические характеристики каналов регулирования и периодически оптимизировать параметры настройки регуляторов по найденным оценкам этих характеристик. В данной ра- боте рассматривается решение этой задачи - задачи оценки параметров объекта управления в замкнутом контуре работающей САР и настройки входящего в ее состав регулятора.
Известны различные способы решения задачи настройки регуляторов в контурах работающей системы. При микропроцессорной реализации САР часто используются так называемые экспертные алгоритмы настройки, основанные на использовании реакции работающей системы на ступенчатое воздействие (переходной функции замкнутой системы) [6-8]. При этом применяется либо возмущение по заданию, либо возмущение со стороны регулирующего органа (по нагрузке -возмущающее воздействие ft ) на рис. 1). Последнее воздействие может быть организовано путем подачи по каналу интерфейсной связи контроллера команды перевода контура регулирования в режим ручного управления с последующим быстрым изменением положения регулирующего органа и немедленным возвратом в автоматический режим.
Рис. 1. Структурная схема системы автоматического регулирования
При этом заметим, что указанное на рис. 1 и часто упоминаемое в литературе возмущающее воздействие z ( t ) - это так называемое возмущение, приведенное к выходу объекта, в части исследования качества регулирования практически ничего не дает, поскольку передаточные функции САР для этого возмущения по любым каналам отличаются от передаточных функций САР для задающего воздействия только знаком «–». Поэтому в данной работе переходные процессы, обусловленные этим возмущением, не исследуются.
Экспертные алгоритмы настройки имеют ряд недостатков, об этом достаточно подробно указано в работах [9, 10]. В качестве альтернативы предлагается формализованная процедура настройки, основанная на частотном подходе [11–13]. Здесь в замкнутом контуре регулирования возбуждаются автоколебания, амплитуда и частота которых оцениваются алгоритмом автонастройки, а затем используются для настройки регулятора данного контура. Однако частотные методы разработаны в период, когда не существовало возможности прямого решения проблемы оптимизации настройки с помощью компьютерной математической модели САР и численных методов нелинейного программирования. Кроме того, частотная методика является графоаналитической, в ней используется ряд допущений и, как правило, велика трудоемкость применяемых процедур. К тому же точность настройки контуров регулирования такими методами уже нельзя признать удовлетворительной. В настоящее время предпочтительнее использовать формальные компьютерные алгоритмы параметрической настройки, разработанные на основе достаточно точных математических моделей САР и численных методов оптимизации [14]. Вопросы достижения требуемой точности настройки и уменьшения объема необходимых графических построений и сопутствующих им «ручных» вычислений при этом автоматически снимаются.
Решение задачи параметрической идентификации
Расчет параметров настройки регулятора должен начинаться с определения динамических характеристик объекта управления, поэтому в любом случае сначала рассматривается эта задача. Причем особенность этой задачи в данном случае заключается в том, что динамические свойства объекта управления необходимо определить по тому, как изменяется выходная величина САР при отработке внесенного возмущения либо по заданию, либо по нагрузке, т. е. по реакции работающей САР [15]. Подобные задачи идентификации в замкнутом контуре регулирования в процессе нормального функционирования системы рассматривались, например, в работах [15-18].
Известно, что динамические свойства большого числа объектов управления могут быть представлены с помощью математической модели следующей структуры:
d2 x . dx a о VT+ai T+x(t)=kоб U(t-T), (1)
dt2 dt
Управление в технических системах
где x(t) - управляемая координата; U(t) - управляющее воздействие; t - время; т - время запаздывания; коб - коэффициент передачи объекта; а0 и а1 - коэффициенты дифференциального уравнения.
В работе [14] задача параметрической идентификации модели (1) решается по экспериментальным кривым разгона объектов управления. В данном же случае эту задачу следует решить, используя переходную функцию работающей САР. Поэтому для отыскания динамических параметров объекта управления нужно использовать математическую модель всего контура регулирования, а не только уравнение (1). Дополним уравнение (1) математической моделью ПИ-регулятора, при этом будем считать, что она имеет вид:
U ( t ) = к Р е ( t ) +—— Je( t ) dt ,
L T о J где e(t) - рассогласование; кР, ТИ - соответственно коэффициент передачи и время интегрирования регулятора. Здесь рассогласование е(t) вычисляется звеном сравнения системы стандартным образом, т. е. по формуле s(t)=xЗД (t) -x(t), где xЗД (t) - заданное значение регулируемого технологического параметра. Возмущения по заданию и по нагрузке в модели контура регулирования (1)-(2) также реализуются известным образом [1-3].
Известно, что дифференциальное уравнение (1) описывает динамические свойства конкретного объекта управления с необходимой точностью только в том случае, если удовлетворительно определены коэффициенты а о , а 1 , к об и время запаздывания т . Рассмотрим решение этой задачи на основе современных достижений теории идентификации [19, 20].
Пусть известна экспериментальная переходная функция САР, информацию, содержащуюся в данной переходной функции, и структуру математической модели контура регулирования, представленную уравнениями (1) и (2), будем считать исходными данными для решения задачи идентификации динамических свойств объекта управления. В принципе вместо экспериментальной переходной функции может быть использована опытная реакция САР на любое возмущение как по заданию, так и со стороны регулирующего органа. Задачу идентификации сформулируем следующим образом: требуется найти такие значения коэффициентов а о , а 1 , к об и времени запаздывания т , при которых критерий идентификации
I ( а 0 , а 1 , к об , т ) = Z [ x Э ( t i ) - x ( t i ) J (3) 1
будет принимать минимальное значение. Здесь x Э ( t i ) - экспериментальное значение выхода объекта или, что то же самое, экспериментальное значение переходной функции САР; x ( t i ) - расчетное значение, определяемое по модели системы (1)–(2) для данного типа возмущающего воздействия; t i - используемые при настройке моменты времени; n - число экспериментальных точек.
Данную задачу идентификации решали с помощью программы, реализующей метод покоординатного спуска, получающиеся при этом задачи одномерной минимизации решали с помощью подпрограммы, использующей метод золотого сечения. При этом для вычисления текущих значений критерия (3) в процессе поиска оптимальных параметров уравнения (1) использовали разработанные в [14] компьютерные алгоритмы расчета переходных процессов в САР при возмущении по заданию или при возмущении по нагрузке. Причем для численного интегрирования уравнение (1) применяли метод Рунге - Кутты с погрешностью, пропорциональной пятой степени шага по времени. Для этого дифференциальное уравнение (1) предварительно записывали в виде системы дифференциальных уравнений первого порядка, т. е. в нормальной форме Коши. В связи с необходимостью обеспечения заданной точности расчета программа построена так, что между экспериментальными точками по времени укладывается целое число расчетных шагов.
Уравнение (2) для компьютерного использования представляли в дискретной форме, при вычислении интеграла применяли метод трапеций. С целью сокращения объема необходимых вычислений использовали рекуррентную форму дискретного представления уравнения (2), приведенную в работе [21]:
U ( k ) = U ( k - 1) + q 0 -e ( k ) + q 1 -e ( k - 1), (4) где k - номер расчетного шага по времени, q о = k Р [1 + h /(2 Т И )], q 1 = k Р [ h 1(2 Т И ) - 1], h - величина расчетного шага по времени.
При тестировании разработанных программ получили вполне приемлемые результаты. Для примера на рис. 2 приведена экспериментальная переходная характеристика САР давления в металлургической печи при возмущении по заданию. В этой системе настройки ПИ-регулятора были равны: k Р = 1,256 % хода ИМ/Па, Т И = 3,436 c. В результате решения задачи идентификации по данным этой кривой были получены следующие значения параметров дифференциального уравнения (1): а0 = 1,709 c2, а 1 = 1,404 c, т= 1,200с k об = 0,906Па/%ходаИМ. Расчет по модели (1)-(2) при данных значениях параметров регулятора и объекта управления показал, что среднеквадратическое отклонение расчетной переходной характеристики контура регулирования от экспериментальной кривой ipjn составило 0,012Па, что вполне приемлемо.
На рис. 3 приведена экспериментальная переходная характеристика той же САР, только при возмущении по нагрузке. По данным этой кривой были получены следующие значения параметров дифференциального уравнения (1): а 0 = 1,564 c2, a 1 = 1,680 c, т= 1,200с, k об = 0,906 Па/% хода ИМ. Расчет по модели (1)-(2) при данных значениях параметров показал, что среднеквадратическое отклонение расчетной переходной характеристики контура регулирования от экспериментальной кривой ^ I/n составило 0,010 Па, что вполне приемлемо. Различие найденных численных значений динамических параметров объекта также можно считать вполне удовлетворительным.
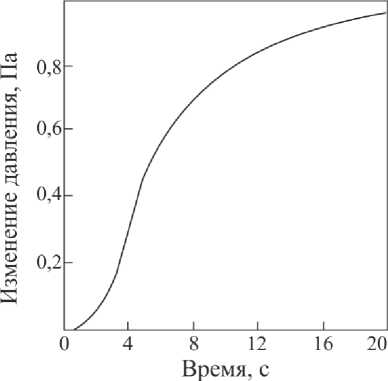
Рис. 2. Экспериментальная переходная характеристика САР давления в металлургической печи при возмущении по заданию
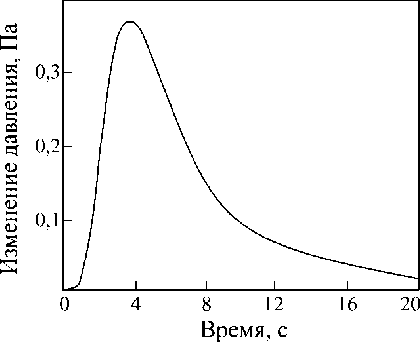
Рис. 3. Экспериментальная переходная характеристика САР давления в металлургической печи при возмущении по нагрузке
Следует заметить, что разработанная процедура настройки достаточно просто модифицируется для случая, когда вместо критерия (3) требуется минимизировать сумму модулей разностей расчетных и экспериментальных значений выходной координаты САР:
n
I ( a0, a 1 , k об , т ) = Е| x Э ( ti ) - x ( ti 4
а также для случая минимаксной задачи: это когда требуется минимизировать максимальное отклонение расчетных значений от экспериментальных данных:
I ( а 0, а 1 , k об, т ) ^ min max x Э( ti ) - x ( ti ) .
a 0 , a 1 , k об , т i
Как известно, оценки параметров, найденные посредством минимизации критерия (3), являются наиболее правдоподобными с точки зрения нормального закона распределения ошибок,
Управление в технических системах
а для случая критерия (5) – для распределения ошибок по закону Лапласа. Кроме того, вполне понятно, что использование интегральных критериев идентификации потребует незначительных изменений в разработанных программах.
После определения динамических параметров объекта управления задачу отыскания оптимальных параметров настройки ПИ-регулятора можно решить с помощью компьютерных алгоритмов работы [14] либо по способу работ [22, 23].
Выводы
Рассмотрено решение задачи параметрической идентификации объекта управления по переходной функции работающей САР. Выполнена апробация разработанных программ по экспериментальным переходным характеристикам САР давления в металлургической печи. Указаны процедуры настройки регуляторов по найденным динамическим параметрам объекта. Результаты работы могут быть использованы при создании алгоритмического обеспечения современных многоуровневых АСУ ТП, на нижнем уровне которых применяются микроконтроллерные САР.
Список литературы Параметрическая идентификация модели объекта управления по переходной функции работающей системы автоматического регулирования
- Копелович, А.П. Инженерные методы расчета при выборе автоматических регуляторов / А.П. Копелович. - М.: Металлургиздат, 1960. - 190 с.
- Проектирование систем контроля и автоматического регулирования металлургических процессов / Г.М. Глинков, В.А. Маковский, С.Л. Лотман, М.Р. Шапировский. - М.: Металлургия, 1986. - 300 с.
- Основы теории и элементы систем автоматического регулирования / В.Ю. Каганов, Г.М. Глинков, М.Д. Климовицкий, А.К. Климушкин. - М.: Металлургия, 1987. - 300 с.
- Климовицкий, М.Д. Регулирование объектов с переменными параметрами / М.Д. Климовицкий // Автоматика и телемеханика. - 1965. - № 1. - С. 168-172.
- Захарова, Е.В. О стабилизации температуры в нагревательных печах периодического действия / Е.В. Захарова, Е.А. Кочетков, В.К. Курилов // Изв. вузов. Черная металлургия. - 1982. - № 2. - С. 155-156.
- Bristol, E.H. Pattern recognition: On alternative to parameter identification in adaptive control / E.H. Bristol // Automatica. - 1977. - Vol. 13. - P. 197-202.
- DOI: 10.1016/0005-1098(77)90046-2
- Kraus, T.W. Self-tuning PID controllers uses pattern recognition approach / T.W. Kraus, T.J. Myron // Control Engineering. - June 1984. - P. 106-111.
- Tachibana, K. Single Loop Controller with Auto-Tuning System Using the Expert Method / K. Tachibana, T. Suehito, T. Saito // Hitachi Review. - 1987. - Vol. 36, no. 7. - P. 357-362.
- Ротач, В.Я. Автоматизированная настройка ПИД-регуляторов - экспертные и формальные методы / В.Я. Ротач // Теплоэнергетика. - 1995. - № 10. - С. 9-16.
- Мань, Н.В. Настройка регуляторов по переходной характеристике замкнутой системы с уточненной моделью объекта / Н.В. Мань // Теплоэнергетика. - 1998. - № 7.- С. 55-58.
- Ротач, В.Я. Расчет динамики промышленных автоматических систем регулирования / В.Я. Ротач. - М.: Энергия, 1973. - 300 c.
- Автоматизация настройки систем управления / В.Я. Ротач, В.Ф. Кузищин, А.С. Клюев и др.; под ред. В.Я. Ротача. - М.: Энергоатомиздат, 1984. - 300 с.
- Ротач, В.Я. Теория автоматического управления теплоэнергетическими процессами / В.Я. Ротач. - М.: Энергоатомиздат, 1985. - 300 c.
- Панферов, В.И. Численный расчет систем автоматического регулирования / В.И. Панферов // Изв. вузов. Черная металлургия. - 1997. - № 4. - С. 66-68.
- Панферов, В.И. Оценка динамических свойств объекта управления по переходной функции замкнутой системы / В.И. Панферов // Изв. вузов. Черная металлургия. - 1999. - № 10. - С. 54-56.
- Штейнберг, Ш.Е. Настройка и адаптация автоматических регуляторов. Инструментальный комплект программ / Ш.Е. Штейнберг, И.Е. Залуцкий, Л.П. Сережин // Промышленные АСУ и контроллеры. - 2003. - № 10. - С. 43-47.
- Qiwen Yang. Simultaneous PID self-tuning and control / Qiwen Yang, Yuncan Xue, Jiao Huang // Proceedings of the 2004 IEEE International Symposium on Intelligent Control, 2-4 Sept. 2004. - 2004. - P. 363-367.
- DOI: 10.1109/ISIC.2004.1387710
- Ho, H.F. Adaptive PID controller for nonlinear system with H∞ Physics and Control / H.F. Ho, Y.K. Wong, A.B. Rad // Proc. of International Conference, 20-22 Aug. 2003. - 2003. - Vol. 4. - P. 1315-1319.
- Растригин, Л.А. Современные принципы управления сложными объектами / Л.А. Растригин. - М.: Сов. радио, 1980. - 300 c.
- Эйкхофф, П. Основы идентификации систем управления: пер. с англ. / П. Эйкхофф. - М.: Мир, 1975. - 300 c.
- Плютто, В.П. Практикум по теории автоматического управления химико-технологическими процессами. Цифровые системы / В.П. Плютто, В.А. Путинцев, В.М. Глумов. - М.: Химия, 1989. - 300 c.
- Панферов, В.И. Об одном подходе к решению задачи выбора и настройки автоматических регуляторов / В.И. Панферов // Известия Челябинского научного центра УрО РАН. - 2004. - Вып. 4 (26). - С. 139-144.
- Панферов, В.И. Выбор и настройка автоматических регуляторов в системах теплоснабжения / В.И. Панферов // Вестник ЮУрГУ. Серия «Строительство и архитектура». - 2005. - Вып. 3, № 13 (53). - C. 81-84.
