Параметрический анализ анизогридного корпуса космического аппарата для очистки орбиты от космического мусора

Автор: Белоновская И.Д., Кольга В.В., Ярков И.С., Яркова Е.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.22, 2021 года.
Бесплатный доступ
Представлен подход к решению задачи проектирования космического аппарата для очистки орбиты от космического мусора (космического сборщика мусора - КСМ), корпус которого выполнен в виде цилиндрической сетчатой анизогридной оболочки. Задачей проектирования является выбор оптимальных параметров анизогридного корпуса КСМ (форма и площадь сечения ребер, количество кольцевых и спиральных ребер, характеристика материала и др.), обеспечивающих необходимую прочность и устойчивость конструкции при минимальной массе. В процессе проектирования проведен параметрический анализ анизогридного корпуса космического сборщика мусора. Варьируя количество и угол наклона однонаправленных спиральных ребер, найдена оптимальная конструктивная схема, отвечающая заданным коэффициентам запаса прочности и устойчивости. Параметрический анализ корпуса КСМ включает в себя моделирование основных весовых и прочностных параметров: определение напряженно-деформированного состояния конструкции, значений собственных частот корпуса, определение запаса потери устойчивости от продольной силы, определение массы корпуса. Анализ несущей способности анизогридного корпуса космического сборщика мусора проводился с помощью метода конечных элементов с использованием программного пакета MSC Nastran. Конечно-элементная модель сетчатой оболочки была создана из двухузловых пространственных BEAM конечных элементов. Диск, прикрепленный к торцевой части оболочки, моделировался с помощью RIGID конечного элемента. Размер балочного конечного элемента для всех моделей оболочек был одинаковым и равным 10 мм. При проведении параметрического анализа были рассмотрены три варианта сетчатой композитной структуры с различным количеством и углом наклона однонаправленных спиральных ребер. По результатам параметрического анализа корпуса КСМ были определены его геометрические размеры и минимизирована масса конструкции космического аппарата в целом.
Космический аппарат, параметрический анализ, прочность космического аппарата, сбор космического мусора, частота колебаний, напряженно-деформированное состояние, потеря устойчивости, конструирование космического аппарата
Короткий адрес: https://sciup.org/148322023
IDR: 148322023 | УДК: 536.2 | DOI: 10.31772/2712-8970-2021-22-1-94-105
Parametric analysis of the anisogrid body of the spacecraft for cleaning the orbit of space debris
The article presents an approach to solving the problem of designing a spacecraft for cleaning the orbit of space debris (space garbage collector-KSM), the body of which is made in the form of a cylindrical mesh anisogrid shell. The design task is to select the optimal parameters of the anisogrid body of the KSM (the shape and cross-sectional area of the ribs, the number of annular and spiral ribs, material characteristics, etc.) that provide the necessary strength and stability of the structure with minimal weight. During the design process, a parametric analysis of the anisogrid housing of the space garbage collector was carried out. By varying the number and angle of inclination of unidirectional spiral ribs, we find the optimal design scheme that satisfies the specified safety and stability coefficients. Parametric analysis of the KSM body includes modeling of the main weight and strength parameters: determination of the stress-strain state of the structure, values of the body’s natural frequencies, determination of the bending margin from the longitudinal force, determination of the body mass. The analysis of the load-bearing capacity of the anisogrid housing of the space garbage collector was carried out by the finite element method using the MSC Nastran software package. A finite element mesh model was created from a two-node spatial finite element bundle. The disk attached to the end of the shell was modeled using a rigid finite element. The size of the final beam element for all shell models was the same and equal to 10 mm. During the parametric analysis, three variants of the mesh composite structure with a different number and angle of inclination of unidirectional spiral ribs were considered. Based on the results of parametric analysis of the spacecraft body, its geometric dimensions are determined and the mass of the spacecraft structure as a whole is minimized.
Текст научной статьи Параметрический анализ анизогридного корпуса космического аппарата для очистки орбиты от космического мусора
Введение. После запуска первого искусственного спутника Земли всеми государствами было проведено более 5000 пусков ракет-носителей. За весь период освоения космоса в околоземное космическое пространство было выведено свыше 30 тыс. крупных (размером более 10–20 см) космических объектов (КО). Зарегистрированных гораздо больше (порядка 35 тыс.), ввиду произошедшей фрагментации некоторых крупных космических объектов. Более двух третей из них всё ещё остаются на орбитах и контролируются наземными и космическими средствами наблюдения. На сегодня официально каталогизировано свыше 17 тыс. КО [1].
Согласно статистике, на долю России, США и Китая приходится 93 % мусорных объектов. Доля остальных стран в сумме составляет около 7 % (по другим оценкам на 2014 г. Россия – 39,7 %; США – 28,9 %; Китай – 22,8 %, остальные страны – 8,6 %) [1].
Наиболее населенные космическим мусором (КМ) орбиты – это те, где концентрация объектов относительно других областей наиболее высока. Это орбиты высотой от 250 до 1000 км.
Под КМ подразумеваются все искусственные объекты и их фрагменты в космосе, которые неисправны и не функционируют, но являются потенциально опасным фактором воздействия на функционирующие и выводимые космические аппараты (КА).
В некоторых случаях крупные или содержащие на борту опасные (ядерные, токсичные и т. п.) материалы объекты КМ могут представлять прямую опасность для Земли при их неконтролируемом сходе с орбиты, неполном сгорании при прохождении плотных слоев атмосферы Земли и выпадении обломков на населённые пункты, промышленные объекты, транспортные коммуникации и т. п.
Проблема засорения околоземного космического пространства КМ как чисто теоретическая возникла по существу сразу после запусков первых искусственных спутников Земли в конце пятидесятых годов прошлого века. Официальный статус на международном уровне она получила после доклада Генерального секретаря ООН под названием «Воздействие космической деятельности на окружающую среду» 10 декабря 1993 г., где было особо отмечено, что проблема имеет международный глобальный характер [2].
Необходимость мер по уменьшению интенсивности техногенного засорения космоса становится понятной при рассмотрении возможных сценариев освоения космоса в будущем. При экстраполяции существующих условий засорения низких околоземных орбит (НОО) «каскадный эффект» от взаимного столкновения объектов и частиц космического мусора может привести к катастрофическому росту их количества на НОО и, как следствие, к практической невозможности дальнейшего освоения космоса. Предполагается, что после 2055 г. процесс саморазмножения остатков космической деятельности человечества станет критичной проблемой для дальнейшего развития мировой космонавтики [1; 2].
Тенденция разработки и проектирования опытных образцов космических сборщиков мусора (КСМ) во всем мире становится все более актуальной в связи с увеличением количества запусков КА на различные орбиты. Для решения проблем сбора космических мусорных обломков (верхних ступеней РН, отработанных спутников и их фрагментов) проектируемые КА, предназначенные для очистки орбит, по принципу воздействия на мусорные обломки делят, как правило, на два вида:
-
1. Контактные (захват мусора манипулятором, тросом, сеткой, гарпуном и др.).
-
2. Бесконтактные (разрушение мусора при воздействии лазерной установки, потока ионов, электростатического поля и сбор мелких обломков).
У всех этих проектов имеется один общий недостаток: все проекты «одноразовые», т. е. ограничены одним рабочим циклом. При этом необходимо учитывать, что работа любого космического мусорщика требует затрат энергии для изменения орбиты, стыковки с обломками мусора, а значит, разгона, торможения и маневрирования на орбите. Энергии солнечных батарей на такие сложные перемещения, как правило, недостаточно. Поэтому при проектировании «многоразовых» КСМ необходимо учитывать его энергетические возможности [3] для реализации нескольких рабочих циклов.
В приведенном исследовании задачей проектирования КСМ определена разработка космического аппарата, способного обеспечить несколько рабочих циклов увода с орбиты космических обломков для снижения себестоимости 1 кг снятого с орбиты КМ. При этом КСМ должен иметь ограниченную массу и габариты для более компактного размещения под головным обтекателем ракеты-носителя [4–9].
Рабочий цикл космического сборщика мусора. Для проектирования КСМ с несколькими рабочими циклами рассмотрим порядок его работы, включающий захват и вывод с орбиты одного обломка КМ. Рабочий цикл включает в себя следующие этапы (рис. 1).
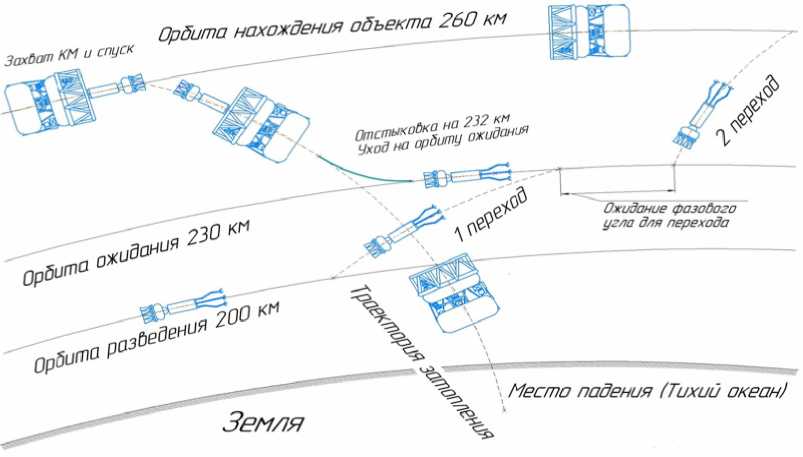
Рис. 1. Рабочий цикл космического сборщика мусора
-
Fig. 1. Space garbage collector duty cycle
-
1. Запуск. При достижении орбиты разведения (отделения полезной нагрузки, высота 200 км) активируются устройства отделения и пружинный механизм выталкивает его от адаптера головной части. Проводятся контрольные проверки и корректировка орбиты. На НОО КСМ ожидает команды для перехода на орбиту фазирования.
-
2. Гомановский переход. Маневр перехода на орбиту ожидания (орбиту фазирования). Первое включение двигателя поднимает КА на расчетную высоту 230 км по эллиптической траектории. Второй импульс предназначен для корректировки и стабилизации на круговой орбите фазирования (первый переход).
-
3. Орбита ожидания (фазирования). Высота: 230 км. Ожидание команды для перехода на орбиту захвата космического обломка. Орбитальная скорость КА на 130 км/ч выше, чем у мусора на орбите 260 км. КСМ дожидается нужного фазового угла, после чего уходит на сближение с КМ.
-
4. Биэллиптический переход. Для перехода ракетного дрона с орбиты ожидания (фазирования) на орбиту КМ гомановский переход недостаточно точен. Для этого используется маневр с тремя включениями двигателей – биэллиптический переход (второй переход).
-
5. Стыковка. После перехода КСМ на орбиту захвата мусора необходимо обеспечить его притормаживание и наведение захватных манипуляторов на обломок КМ с помощью двигателей коррекции и бортовой радарной системы. Компьютер автоматически управляет маневренными двигателями и обеспечивает захват объекта. В случае нештатной ситуации бортовая система отменит стыковку и вернет КА на орбиту фазирования для поиска новой цели.
-
6. Спуск. После успешного захвата манипуляторами мусорного обломка, КА совершает манёвр ухода с орбиты на траекторию затопления. На высоте 232 км происходит отстыковка КСМ от обломка КМ, который продолжает двигаться по заданной траектории и попадает в плотные слои атмосферы, где сгорает или попадает в заранее заданную точку «Немо», расположенную в Тихом океане.
КСМ переходит с траектории затопления на орбиту фазирования и начинает новый рабочий цикл.
По данным расчёта, один КСМ снимает от 3 до 6 блоков «И» массой 2,7 т (третья ступень РН «Союз») с орбит до 300 км. Количество рабочих циклов зависит от высоты орбиты мусорного обломка и требуемых орбитальных маневров для стыковки и увода мусора с орбиты.
Конструкция КСМ. Для обеспечения нескольких рабочих циклов очистки орбит от КМ, была предложена конструкция КСМ, представленная на рис. 2. При этом были учтены требования минимизации массы и габаритов космического аппарата.
Конструктивно КСМ состоит из трех отсеков (рис. 2):
– блок манипуляторов;
– конструкция корпуса КСМ;
– двигательный отсек.
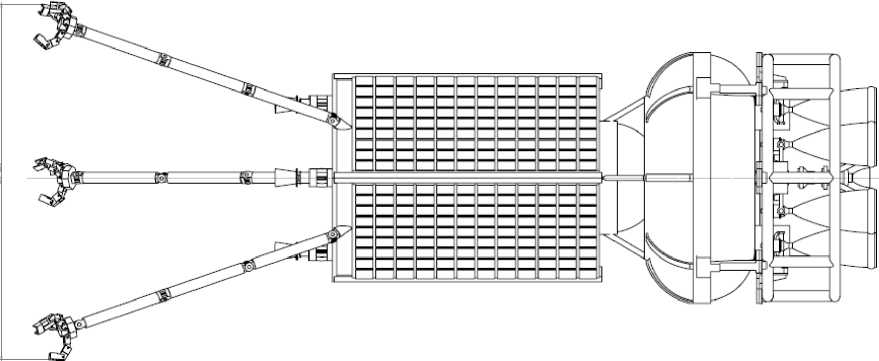
Рис. 2. Общий вид космического сборщика мусора
-
Fig. 2. General view of the space garbage collector
Блок манипуляторов представляет собой три манипулятора в виде клешней с замыкающими зажимами. Преимуществом манипуляторов перед другими приспособлениями является жёсткий захват космического обломка и его быстрая расстыковка.
В вакууме любое малейшее столкновение объектов влияет на возможные отклонения их дальнейших траекторий. Чтобы обеспечить надежную стыковку КА с мусорным обломком, необходимо обеспечить достаточно жесткое и эффективное устройство захвата.
В качестве захватов предложено использовать адаптивное трехпалое захватное устройство (патент WO 2004/028753) [10], изображенное на рис. 3. Устройство включает в себя корпус с установленными на нем тремя пальцами, расположенными в вершинах равнобедренного или равностороннего треугольника. Каждый палец состоит из трех фаланг, первая из которых поворачивается относительно корпуса, а вторая и третья фаланги поворачиваются относительно первой и второй соответственно с помощью индивидуальных поворотных приводов с параллельными осями вращений. Каждый из пальцев выполнен с возможностью поворота относительно корпуса на угол не менее 90° с помощью индивидуального привода.
К манипулятору крепится поворотный привод, поворачивающий корпус с пальцами относительно мусорного обломка. В качестве индивидуальных приводов используются сервоприводы с встроенными индикаторами, а контактные поверхности фаланг оснащены тактильными датчиками для работы с объектами разной формы, жесткости и прочности. Предложенное решение позволяет повысить функциональные возможности блока манипуляторов и надежность схватывания объектов с заранее неизвестной формой.
Конструкция корпуса КСМ представляет из себя тонкостенную анизогридную сетчатую оболочку, подкрепленную с торцов силовыми шпангоутами. На шпангоуты с разных торцов крепятся блок манипуляторов и двигательный отсек. Задачей проектирования является подбор оптимальных параметров анизогридного корпуса КСМ (форма и площадь сечения ребер, коли- чество кольцевых и спиральных ребер, характеристика материала и др.), обеспечивающих необходимую прочность и устойчивость конструкции при минимальной массе.
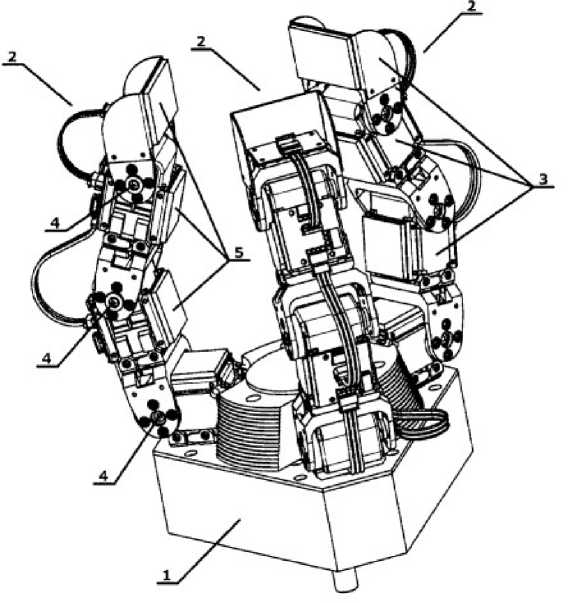
Рис. 3. Захватное устройство:
1 – корпус; 2 – пальцы, 3 – фаланги пальцев; 4 – сервоприводы;
5 – контактная площадка фаланг
-
Fig. 3. Gripping device:
1 – body; 2 – fingers; 3 – finger phalanges; 4 – servos;
5 – contact area of the phalanges
Двигательный отсек состоит из маршевого двигателя, обеспечивающего межорбитальные переходы с орбиты ожидания на орбиту захвата и далее на траекторию затопления, и двигателей коррекции для корректировки орбит и точного захвата мусорных обломков.
Выбор расчетной схемы. КСМ представляет из себя конструкцию длиной 2686 мм (при сложенных манипуляторах) при длине корпуса 1600 мм. Диаметр миделевого сечения КА равен 1200 мм. Поэтому для расчета корпуса примем цилиндрическую анизогридную сетчатую оболочку длиной 1600 мм и диаметром 1200 мм. Такой подход упрощает расчетную модель, позволяя представить все внешние силы в виде комбинации продольно направленных осевых нагрузок. В этом случае упрощения в конструкции корпуса могут быть учтены в виде коэффициента запаса прочности.
При выборе расчетной схемы необходимо проанализировать работу конструкции и отдельных ее элементов как в процессе вывода КА на базовую орбиту, так и в процессе его эксплуатации (межорбитальные переходы, захват мусора, его транспортировка и утилизация).
Для определения расчетного случая рассмотрим расположение КА под головным обтекателем ракеты-носителя «Союз 2.1б» во время доставки полезной нагрузки на базовую орбиту.
Сосредоточенные силы. В рассматриваемой расчетной схеме под сосредоточенными силами мы понимаем давление, распределенное по периметру силового шпангоута и приложенное в точках крепления к нему двигательного отсека. Кроме того, к внешним силам также будем относить и реакции связей, возникающих на противоположном силовом шпангоуте в месте крепления КА к адаптеру головной части.
Массу двигательного отсека m = 1008 кг приложим к силовому опорному шпангоуту крепления ДУ. Силовой шпангоут на противоположном краю корпуса КСМ примем жестко закрепленным к адаптеру в месте установки полезной нагрузки. Расположенный на силовом шпангоуте блок манипуляторов для захвата космического мусора и маневренные двигатели общей массой 45 кг закреплены на этом же шпангоуте и связаны с креплением опоры к адаптеру.
Распределенные нагрузки. В нашей расчетной схеме это инерционные силы от действия перегрузки в момент работы ракеты-носителя на активном участке траектории.
Анализ активного участка траектории позволил определить величину максимальных значений перегрузки в процессе вывода КСМ на базовую рабочую орбиту. Примем их равными n = 5g.
Таким образом, расчетная схема примет вид, изображенный на рис. 4.
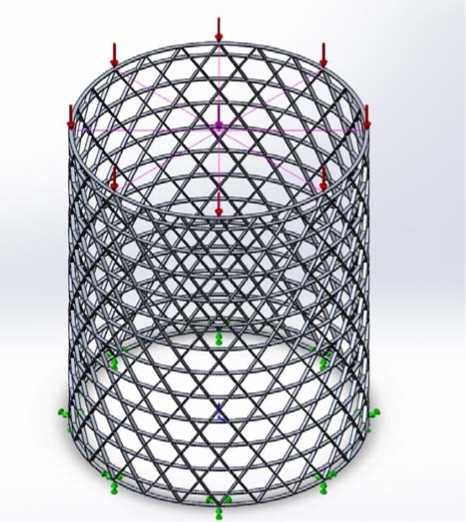
Рис. 4. Расчетная схема сетчатого анизогридного корпуса сборщика космического мусора
-
Fig. 4. Design scheme of the mesh anisogrid housing of the space debris collector
Параметрический анализ конструкции сетчатого анизогридного корпуса КСМ включает в себя моделирование следующих весовых и прочностных характеристик.
-
– определение напряженно-деформированного состояния конструкции;
-
– определение собственных частот конструкции;
-
– определение запаса потери устойчивости от продольной силы;
– определение массы корпуса.
Анализ результатов расчетов позволит нам выбрать оптимальную конструкцию анизогрид-ного корпуса сборщика космического мусора на основе критериев прочностных и весовых характеристик.
Конечно-элементное моделирование. Композитные сетчатые цилиндрические оболочки широко используются в качестве несущих корпусов космических аппаратов [11; 12]. Сетчатый цилиндрический корпус испытывает действие сжимающих нагрузок, возникающих при выведении космического аппарата на орбиту. Исследование продольного деформирования сетчатого корпуса является важным этапом его проектирования. Корпус проектируемого нами КСМ представляет собой сетчатую цилиндрическую оболочку, один край которой закреплен, а другой край нагружается осевой сжимающей силой. Величина силы равна произведению веса КА на максимальную осевую перегрузку. Перемещение нагруженного края оболочки является мерой продольной жесткости сетчатого корпуса КА. Нагружение осуществляется через абсолютно жесткий диск, расположенный на краю оболочки (опорный силовой шпангоут). Для решения подобной задачи ранее уже была использована континуальная модель сетчатой оболочки [13; 14]. Процесс деформирования описан уравнениями нелинейной безмоментной теории ортотропных цилиндрических оболочек. Получена формула, с помощью которой можно определить перемещение диска и оценить продольную жесткость сетчатой цилиндрической оболочки. Эта формула была использована для исследования влияния угла наклона и числа спиральных ребер на величину перемещения торцевого шпангоута.
Воспользуемся аналитическими формулами, выведенными в работах [14], для вычисления перемещения жесткого диска, прикрепленного к сетчатой анизогридной оболочке, обладающей различными геометрическими и жесткостными параметрами, под воздействием осевых нагрузок.
Рассмотрим сетчатую оболочку, у которой спиральные и кольцевые ребра имеют одинаковое поперечное сечение и изготовлены из одного однонаправленного углепластика. При расчетах перемещений жесткого кольца будем варьировать число спиральных ребер и угол их наклона.
Для верификации результатов, полученных с помощью аналитических формул, решим задачу о сжатии сетчатой оболочки с помощью метода конечных элементов. Определим перемещение жесткого диска, используя пакет MSC Nastran [15]. Конечно-элементная модель сетчатой оболочки была создана из двухузловых пространственных BEAM конечных элементов. Диск, прикрепленный к оболочке, моделировался с помощью RIGID конечного элемента. Размер балочного конечного элемента для всех моделей оболочек был одинаковым и равным 10 мм. Перемещения жесткого диска, найденные с помощью метода конечных элементов, сравним со значениями, полученными аналитически. Максимальная относительная погрешность между этими перемещениями не превышает 5 %, что подтверждает корректность принятой нами конечно-элементной модели анизогридного корпуса КСМ.
При проведении параметрического анализа анизогридного корпуса КСМ методом конечных элементов рассмотрим три варианта сетчатой композитной структуры ребер (табл. 1).
В качестве материала корпуса КСМ примем углеродную матрицу с углеродным волокном в качестве армирующего наполнителя со следующими физико-механическими свойствами: E = 170 ГПа, ρ = 1550 кг , σ в = 350 МРа.
м3
Для выбранных нами трех вариантов сетчатой композитной структуры корпуса КСМ (табл. 1) были определены максимальные значения напряжений и деформаций, а также запас потери устойчивости в каждом расчетном случае.
Анализ напряженно-деформированного состояния позволил определить максимальные значения напряжений в конструкции, а также наиболее нагруженные ребра и сечения корпуса. Кроме того, вычисленные максимальные абсолютные деформации позволили провести их сравнение с нормативным конструктивным допуском при расположении полезной нагрузки под головным обтекателем ракеты-носителя. В каждом расчетном случае нами были определены собственные частоты корпуса КСМ и запас потери устойчивости.
Результаты параметрического анализа анизогридного корпуса приведены в табл. 2.
Результаты численного моделирования параметров анизогридного корпуса КСМ
Параметры анизогридной структуры корпуса КСМ
Таблица 1
|
Вариант |
Количество однонаправленных спиральных ребер, шт. |
Угол наклона ребра, град |
|
1 |
24 |
15 |
|
2 |
30 |
12 |
|
3 |
36 |
10 |
Таблица 2
|
Количество спиральных ребер |
Угол наклона ребер, град |
Максимальные деформации δ , мм |
Максимальные напряжения σ , МПа |
Коэффициент запаса потери устойчивости |
Масса конструкции, кг |
|
24 |
15 |
1,590 |
67,850 |
1,63 |
157,97 |
|
30 |
12 |
0,920 |
55,200 |
2,45 |
173,69 |
|
36 |
10 |
0,647 |
45,480 |
3,37 |
190,35 |
По результатам параметрического анализа примем корпус космического сборщика мусора в виде анизогридной сетчатой оболочки с 24 спиральными однонаправленными ребрами (рис. 5, 6).
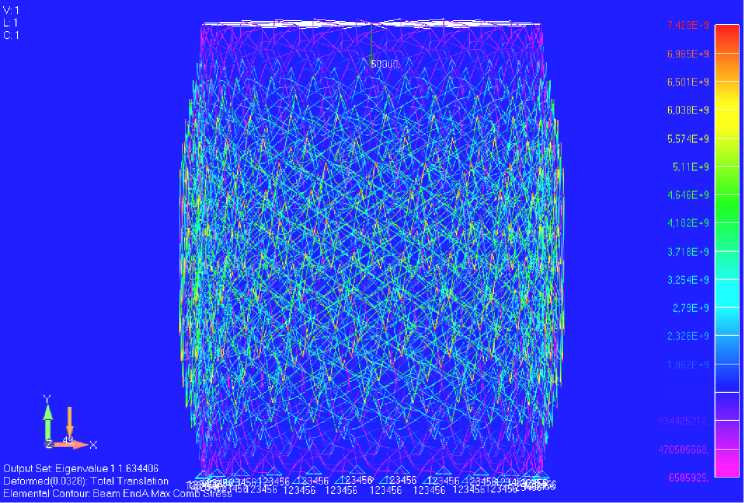
Рис. 5. Потеря устойчивости корпуса КСМ (24 спиральных ребра)
Fig. 5. Loss of stability of the KSM body (24 spiral ribs)
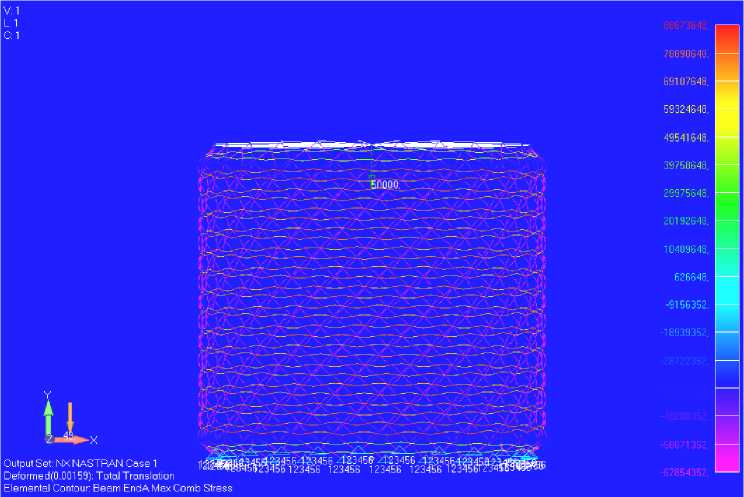
Рис. 6. Напряженно-деформированное состояние корпуса КСМ (24 спиральных ребра)
Fig. 6. Stress-strain state of the KSM body (24 spiral ribs)
При этом запас потери устойчивости составил 1,63, коэффициент запаса прочности σ в = 350/67,85 = 5,1. Масса сетчатого анизогридного корпуса составила 157, 97 кг.
σ max
Общая масса КСМ при этом составила m = 1243, 35 кг.
Заключение. В работе представлен подход к решению задачи проектирования КСМ, корпус которого выполнен в виде цилиндрической сетчатой анизогридной оболочки. В работе выполнен параметрический анализ анизогридного корпуса КСМ. Варьируя количество и угол наклона однонаправленных спиральных ребер, найдена оптимальная конструктивная схема, отвечающая требуемому запасу прочности и устойчивости. Определена основная частота колебаний конструкции корпуса, исследовано его напряженно-деформированное состояние и проведен расчет на устойчивость.
По результатам параметрического анализа корпуса КСМ были определены его геометрические размеры и минимизирована масса конструкции космического дрона в целом.
Список литературы Параметрический анализ анизогридного корпуса космического аппарата для очистки орбиты от космического мусора
- Что такое космический мусор и методы борьбы с ним [Электронный ресурс]. URL: https://bezotxodov.ru/musor/kosmicheskij-musor (дата обращения: 01.06.2020).
- Головко В. Космический мусор // Наука и техника. 2020. № 7. URL: https://naukatehnika. com/kosmicheskij-musor.html (дата обращения: 11.07.2020).
- Kolga V. V., Yarkov I. S., Yarkova E. A. Development of the heat panel of the small space apparatus for navigation support // Siberian journal of science and technology. 2020. Vol. 21, No. 3. 382-388. DOI: 10.31772/2587-6066-2020-21-3-382-388.
- Современные отечественные ракеты-носители. Ракетно-космическая техника / В. В. Филатов, М. Д. Евтифьев, Л. Н. Лебедева, В. В. Кольга ; СибГАУ. Красноярск, 2005, 144 с.
- Современные ракеты-носители зарубежных стран. Ракетно-космическая техника / М. Д. Евтифьев, Л. А. Ковригин, В. В. Кольга и др. ; СибГАУ. Красноярск, 2010. 276 с.
- Тестоедов Н. А., Кольга В. В., Семенова Л. А. Проектирование и конструирование баллистических ракет и ракет носителей / СибГАУ. Красноярск, 2014. 308 с.
- Замятин Д. А., Кольга В. В., Богданова В. С. Методы защиты космических аппаратов от внешних воздействий // Решетневские чтения : материалы XXI Междунар. науч.-практ. конф. / СибГУ им. М.Ф. Решетнева. Ч. 1. Красноярск, 2017. С. 9-11.
- Обзор разгонных блоков, совместимых с семейством ракет-носителей «Ангара» / Д. А. Замятин [и др.] ; СибГУ им. М. Ф. Решетнева // Решетневские чтения : материалы XXI Междунар. науч.-практ. конф. Ч. 1. Красноярск, 2017. С. 11-13.
- Замятин Д. А., Кольга В. В. Построение анизогридной силовой конструкции адаптера космического аппарата // Решетневские чтения : материалы XXII Междунар. науч.-практ. конф. ; СибГУ им. М.Ф. Решетнева. Ч. 1. Красноярск, 2019. С. 26-28.
- Интеллектуальный робототехнический захват (W02004028753) Доступ из справ. системы «WIPO» / W. T. Townsend, T. Hauptman, A. Crowell et al. [Электронный ресурс]. URL: https://patentscope.wipo.int/search/en/detail.jsf?docId=W02004028753&_cid=P20-KKMCUK-92305-1 (дата обращения: 15.08.2020).
- Anisogrid composite lattice structures - development and space applications / V. V. Vasiliev, V. A. Barynin, A. F. Rasin et al. // Composites and Nanostructures. 2009. Vol. 3. P. 38-50.
- Vasiliev V. V., Barynin V. A., Razin A. F. Anisogrid composite lattice structures - development and aerospace applications // Composite Structures. 2012. Vol. 94, No. 11. P. 17-27.
- Lopatin A. V., Morozov E. V., Shatov A. V. Buckling of uniaxially compressed composite anisogrid lattice cylindrical panel with clamped edges // Composite Structures. 2017. Vol. 160. P. 765-772.
- Lopatin A. V., Morozov E. V. , Shatov A. V. Axial deformability of the composite lattice cylindrical shell under compressive loading: Application to a load-carrying spacecraft tubular body // Composite Structures. 2016. Vol. 146. P. 201-206.
- MSC Nastran. User's guide: MSC. Siemens Product Lifecycle Management Software Corporation [Электронный ресурс]. URL: https://docs.plm.automation.siemens.com/data_services/ resources/nxnastran/10/help/en_US/tdocExt/pdf/User.pdf (дата обращения: 21.11.2020).
