Параметрический анализ устройства для разрушения тюков соломы

Автор: Ермольев Юрий Иванович, Дорошенко Артем Александрович, Иващенко Игорь Александрович, Фоменко Роман Евгеньевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Процессы и машины агроинженерных систем
Статья в выпуске: 2 (81) т.15, 2015 года.
Бесплатный доступ
Предметом настоящего исследования является аналитическое моделирование и многомерный анализ процесса разрушения тюков соломы барабанным разрушителем с радиальными пальцами и горизонтальной осью вращения. Цель работы - выявление закономерностей процесса разрушения тюков соломы при вариации геометрических и кинематических параметров устройства для разрушения. Задача - оценка влияния геометрических параметров, композиции и кинематики разрушителя тюков на показатели его функционирования. Метод исследования - аналитическое моделирование. Оценено влияние на процесс разрушения тюка соломы длины пальцев, их количества, частоты вращения барабана, его расположения по отношению к тюку, подачи тюков транспортером. Выявлено, каким образом рассмотренные факторы и их параметры влияют на направление и спектр выброса соломин с пальцев барабанного разрушителя с учетом попадания летящих соломин на следующий элемент системы рабочих органов. Предварительно оценена рациональность пространственного расположения барабанного разрушителя, его геометрических и кинематических параметров для технологических свойств тюков соломы и заданного интервала вариации величины производительности технологического устройства. Выявлено, что процесс разрушения тюка, перемещение соломин по пальцам и траектория их движения в воздушном пространстве в значительной степени зависят от длины рабочей зоны захвата пальцами соломин из тюка.
Барабанный разрушитель, тюк соломы, процесс разрушения, математическая модель, моделирование, многомерный анализ
Короткий адрес: https://sciup.org/14250137
IDR: 14250137 | УДК: 631.362.001.573 | DOI: 10.12737/11609
Parametric analysis of straw wad destroyer
The research subject is an analytical modeling and multivariate analysis of the straw wad destruction by the cutting cylinder with radial fingers and a horizontal axis of rotation. The work objective is the detection of regularities for straw wad destruction under the geometric and kinematic parameter variation of the gear for wad breaking. The research objective is the impact assessment of the geometric parameters, composition and kinematics of the straw wad destroyer on its performance indices. The investigative technique is an analytical modeling. The effect of the fingers length, their number, cylinder chopper rotation velocity, its arrangement in respect to the straw wad, straw wad conveyorized infeed on the straw wad destruction process is estimated. It is found how the factors considered and their parameters affect the direction and range of the culm ejection from the drum destroyer fingers taking into account how the flying straws hit the next element of the operative parts system. The spatial arrangement rationality of the drum destroyer, its geometric and kinematic parameters for the processing properties of straw bales, and the specified variability interval of the performance values of the technological device is preevaluated. It is established that the process of bale destruction, the movement of straws on the fingers, and the trajectory of their movement in the air, depends significantly on the operating width of the finger gripping the straw wad.
Текст научной статьи Параметрический анализ устройства для разрушения тюков соломы
Введение. Параметрический анализ функциональной схемы устройства для разрушения тюка соломы (УРТС) преследует ряд практических целей. В частности, необходимо обеспечить определенную ориентацию стеблей [ 1 ] и добиться измельчения в соответствии с агротребованиями. Для этого следует определить эффективность существующих рабочих органов сельскохозяйственной машины или обосновать необходимость новых. Задача описываемых устройств — реализация одной частной технологической операции или подсистемы вариантов, необходимых для выполнения заданного технологического процесса проектируемого УРТС [2].
Системный анализ и параметрический синтез операции и реализующего ее рабочего органа зависят от количества, качества обрабатываемого материала на предыдущей операции в системе и характеристик его подачи на исследуемый рабочий орган (закономерности поступления, потока материала по времени, по ширине).
Анализ устройств для подачи и измельчения стеблевой массы [3–8], логико-эвристический подход позволят рассмотреть различные варианты [9] разрушителей тюков с подачей на рабочие органы для ориентации и измельчения соломин.
Рассмотрим вариант возможного разрушителя тюков соломы с одним разрушителем с горизонтальным барабаном (рис. 1).
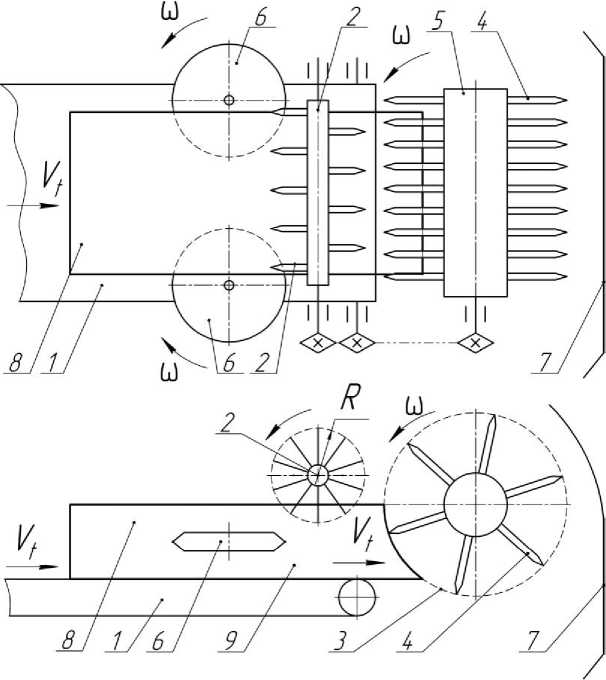
Рис. 1. Схема устройства для разрушения тюков соломы: 1 — транспортер подающий; 2 — подающее устройство;
3 — разрушитель тюка; 4 — пальцы разрушителя тюков; 5 — горизонтальный барабан; б — режущие диски;
7 — направляющий щиток; 8 — тюк соломы
Математическая модель процесса. Аналогично устройству для разрушения тюков соломы варианта № 1 [9] происходят подача тюка 8 транспортером 1 с подающим устройством 2 и обрезание его завязок режущими дисками 6. На горизонтальном барабане 5 установлены пальцы 4 разрушителя тюков 3 .
При вращении барабана 5 с пальцами от подаваемого тюка отделяются соломины и отбрасываются в сторону направляющего щитка 7. Таким образом обеспечивается равномерная по ширине тюка подача соломы на сепаратор-ориентатор. Итак, горизонтальный барабан вращается. Вследствие этого при небольшой подаче тюка соломы пальцы разрушителя внедряются в тюк и отрывают от него соломины. Они перемещаются по пальцам к их концам и отбрасываются в сторону направляющего щитка.
Оценим возможный спектр траекторий для двух случаев. Первый: соломина находится на конце пальцев в момент выхода пальца из тюка. Второй: в этом же положении пальцев соломина находится у их основания.
В первом случае в воздушном пространстве перед направляющим щитком соломины перемещаются по нижней траектории, во втором — по верхней (рис. 2).
Процессы и машины агроинженерных систем
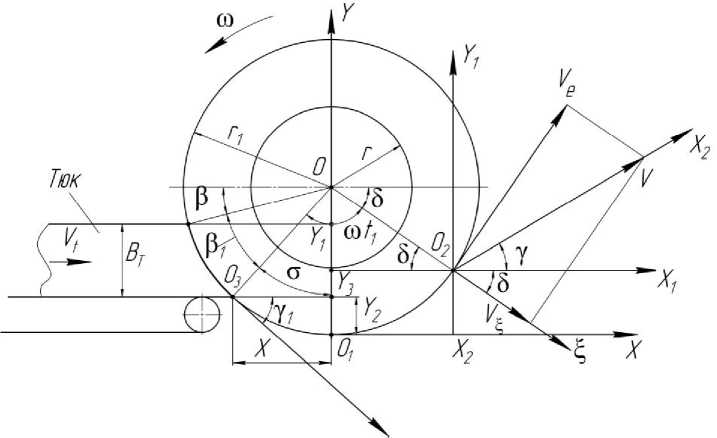
Рис. 2. Схема скоростей перемещения центров масс О 2и О 3 частиц соломистого вороха после схода с радиальных пальцев, вращающихся вокруг горизонтальной оси О
Допустим, что частица материала, поступившая на пальцы, будет вращаться вместе с ними и перемещаться по их поверхностям.
:
-
— силы веса частицы — mg ;
-
— центробежная сила — mr СО2;
-
— сила трения — f N ;
-
— сила Кориолиса — 2СО m '.
Если пальцы расположены радиально, то уравнение перемещения частиц по пальцу имеет вид [10]:
= l a 1 e X 1 t + b 1 e X 2 t c 1 0) sin 0) t d 1 0) cos 0) t ,
g где a1
;
bg И 1 1 1 + f э 120) 2(1 f 2)(
fg
; c 1 2 ( 1
d 1 2 g 2 ; X 1= ®
2 2
;
X 2 = 0)
-
( - f —-^ 1+ f 2); f — коэффициент трения частицы о пальцы.
Продифференцировав ( 1 ), получили выражение (2) для расчета скорости ^ ( V r
:
V r V Ё = a 1 X 1 e х 1 t+ b 1 X 2 e х 2 t c 1 го cos 0) t+ d 1 0) sin 0) t .
Определим координаты ( X , Y 2) и направление вектора Ve 1 абсолютной скорости движения центра масс Î 3соломистой частицы при сходе с пальцев в нижней части тюка.
Допустим, что координата Y 1 точки С отвечает условию YCX 0, точка С конца пальца входит в тюк вертикально. Приняв эти условия, запишем ординату Y 1 :
Y 1 r 1< 1+ cos
arcsin
VT
I r 1
Тогда угол Р , определяющий точку С, находится из выражения
р = arcsin
r ^^^™ у r1 1
r 1
Y arcsin 1 1
r 1
Координату Y 2 точки О 3 найдем из условия разрушения нижней части тюка при его деформации (определится экспериментально).
Угол Р1 поворота пальца при его входе и выходе из тюка определится из рис. 2:
Р 1 90° -р-о, (5)
где Р находится из выражения (4).
Координата X точки О 3 определится из рис. 2 с учетом условия минимального зазора между траекторией :

X r 1 sin <3 , (6)
r 1 -где ст = arccos 1
r 1
Абсолютная скорость схода частицы с конца пальца в точку О3 (–X , Y2 ) равна переносной скорости пальцев в точку О3.Учитывая (6), угол у1 :
Y у1 = з = arccos 1 2 , (7)
r 1
:
V e 1 со • r 1.(8)
Определим координаты ( X 2 , Y 3 )точки О 2 и направление (угол у ) вектора абсолютной скорости V частицы
:
-
— соломина находится у основания пальца при входе пальца в тюк;
-
— начало относительного перемещения соломины по пальцу ;
— выброс с пальца в точке О 2 (рис. 2).
Для этих условий очевидно, что величина абсолютной скорости частицы при сходе с пальца в точке О2 опре делится из выражения
V -^V2 + Ve2 ,(9)
где V . находится из (2),
Ve Ve1 = 0)r1 .(10)
Из рис . 2 очевидно, что угол у , определяющий направление абсолютной скорости V , находится из выражений
VV у+ 5 = arctg V , Y = arctgV--5,(11)
где
5 = 180o — Р — оэt1 .(12)
Здесь Р находится из выражения (4); величину t 1 определяет условие начала перемещения частицы от основания пальца радиуса r до его конца r 1 при угле со • t 1 поворота пальца из (1); величины V и V ; определятся соответственно из (9) и (2).
Из рис. 2 координаты X 2 , Y 3 точки О 2 находятся из выражений
X 2 r 1 cos 5 , Y 3 r 1 (1 sin 5). (13)
Рассмотрим перемещение центров масс О 2 и О 3 (рис. 2 , 3)соломин, выброшенных с пальцев разрушителя тюка в воздушной неподвижной среде. При этом учтем сопротивление среды перемещению соломин и небольшие скорости перемещения, пропорциональные первой степени относительных скоростей соломин в воздушной среде (рис. 3).
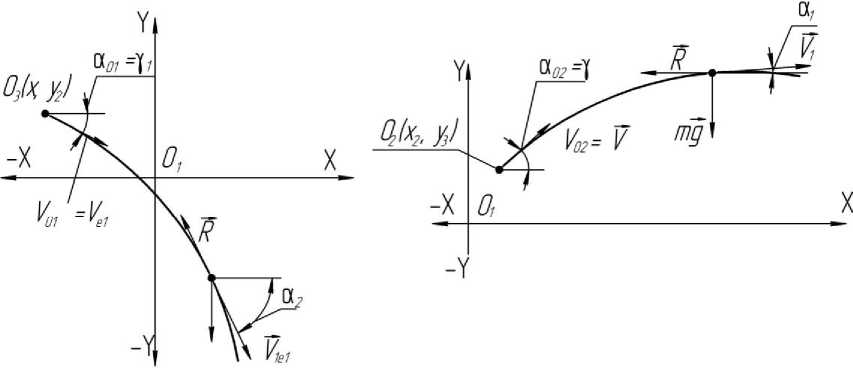
Рис. 3. Траектории движения центров масс Î 2 и Î 3 частиц соломистого вороха после выбрасывания их с концов радиальных пальцев, совершающих вращение вокруг горизонтальной оси, для различных величин а — угла поворота пальцев от горизонтальной оси разрушителя тюка: а = (р+р1) ( а ); ОС = (р+р1 + 0) t 1 ) ( б)
Процессы и машины агроинженерных систем
Условия угла а поворота пальцев в конструкции пальцевого разрушителя тюка с вертикальной осью вращения [9] рассматриваются по аналогии с процессом перемещения центров масс соломин в воздушной среде: а0(Р + 31), i = 1;
а0(р + р1 + со t 1) , i = 2;
Xoi Voi cos а0;
Yoi Voi sin а0, где а0(i 1) = Y1; а0(i 2) = Y ; Vo (i 1) Ve1; Vo(i 2) V .
X i X oi -(1 e~" j ') ,
j
Y i
У
Y oi
j
6 2 j J
ej
)- g t . j
Здесь â j определится из выражения
- j V g 2 , j
где g = 9,8 м/с2, V 2 — скорость витания j -го компонента соломин в воздушном потоке.
Y
Y oi g вj 2
V jj у oi
X;
j g ln Xoi
37" 2 V
j oi j i
Используя вышеизложенную методику расчета параметров барабанного разрушителя тюков соломы по оценке их геометрических и кинематических параметров, запишем заданную длину l захвата каждым пальцем соломин тюка l VT 2 I,
zСО где скорость VT движения тюка зависит от заданной производительности Q УРТС, объема тюка WT (его длины LT , ширины BT , толщины HT , плотности уT.
WT Y Т ту ™
Очевидно, что Q T T V T [кг/с], отсюда
V QL T
.
T W у
T J T
Из выражения (21) определим величину V T и из выражения (20) — оз. Для этого зададимся величиной l , производительностью Q, числом z рядов пальцев. При этом примем во внимание, что пальцы не должны забиваться (угол между пальцами должен быть больше угла трения соломин по пальцам) .
Длина r 1 пальцев (до оси О,рис. 2) определится из трансцендентного уравнения:
r 1
Y 1
1 sin р,
где Y 1 находится из выражения (3).
Радиус r барабана находится из заданных условий начала выброса центра масс соломины (точка О2 рис. 2) с пальцев. Данные условия определяются углом га • t1 поворота пальца, обеспечивающим путь r1 ^^^™ r прохождения цен- тра масс соломин по пальцам.
Задаваясь величиной r , изменяем длину пути r 1 ^^^™ r , координату точки О 2(0) t 1 ) и траекторию перемещения центра масс О 2 соломины в воздушном пространстве. Цель данной операции — определить условия, обеспечивающие рациональное перемещение соломины в сторону следующего рабочего органа — сепаратора.
Моделирование и многомерный анализ. Рассмотрен технологический процесс, выполняемый разрушителем тюков с радиальными пальцами и горизонтальной осью вращения (рис. 1). При этом ширина укладки двух тюков на подаю- щий транспортер В = 0,95 м; средняя плотность тюков у = 15,6 кг/м 3; задаваемая часовая производительность разрушителя тюков Q = 2,8 т/ч; радиус барабана r r1 l (рис. 2).
Из рис . 2 видно, что радиус r 1 барабана с пальцами длиной l :
r 1 Y 2 + Я + АУ , (23)
где Y 2 — координата подающего транспортера по отношению к нижней точке барабана разрушителя с пальцами длиной l ; А Y — превышение центра О барабана разрушителя над верхней поверхностью тюков соломы на транспортере.
Многомерный анализ позволил оценить величину r 1 = 0,51 м.
Для каждой величины Q ( Q = 2; 2,8; 3,6; 4,4 т/ч), фиксированной для рассматриваемого варианта, скорость VT подающего транспортера определялась из выражения (21).
Задавая длину l пальцев разрушителя тюков в интервале 0,008–0,04 м и числа z пальцев на окружности барабана разрушителя, из выражения (20) определялась необходимая величина угловой скорости о барабана. Число рядов z = 16 шт. пальцев на барабане разрушителя принято из следующих условий: — соломины не забиваются между пальцами;
-
— соломины перемещаются по пальцам и выбрасываются с них.
Расчетная программа для ЭВМ построена в Excel с использованием математической модели (1)–(23). Оценены основные закономерности разрушения тюков соломы, перемещения соломин по пальцам разрушителя тюков, условия и направления их выброса с пальцев для различных уровней факторов — Q , l , Y 2.
Анализ. Анализ влияния расположения подающего транспортера (координата Y 2) по отношению к нижней точке барабана разрушителя тюков (рис. 2) позволил установить существенное увеличение угла у1 выброса соломин с пальцев в точке О2 (рис. 2) при увеличении координаты Y 2. Так, при Y 2 = 0 м, у 1 00 , а при Y 2 = 0,1 м,у1 = 36,4940. Изменение координаты Y 2 влияет и на направление выброса соломин с пальцев в точке О 2 (рис. 2). Возможный выброс соломин в точке О 2 :
-
— ДЛИНОЙ l рабочей зоны пальцев;
-
— угловой скоростью со барабана разрушителя;
-
— коэффициентом f трения соломин о пальцы.
Увеличение координаты Y 2 уменьшает величину угла у . Так, для Q = 2,8 т/ч и l = 0,008 м при Y 2= 0 м у = 36, 5660 , при Y 2= 0,1 М у = 25, 0870 . Направление выброса соломин с пальцев в точке О 2 определяет их дальнейшее попадание на последующие рабочие органы всей технологической линии УРТС. Анализ направлений выброса соломин в точке О 2 и компоновки всей технологической линии позволяет считать возможной рациональной величиной Y 2 = 0,05 м.
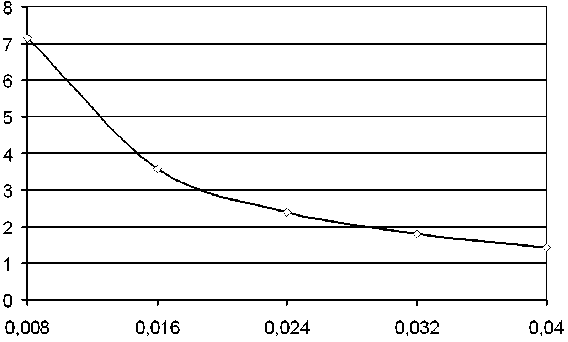
Существенное влияние на угловую скорость со барабана разрушителя тюков, а следовательно, и на скорости Ve1 , V выброса соломин с пальцев в точке О 3и О 2 оказывают длина l рабочей части пальцев барабана и подачи Q тюков к разрушителю (рис. 4).
оз, рад/с
l , м
а )
Процессы и машины агроинженерных систем
оз, рад/с
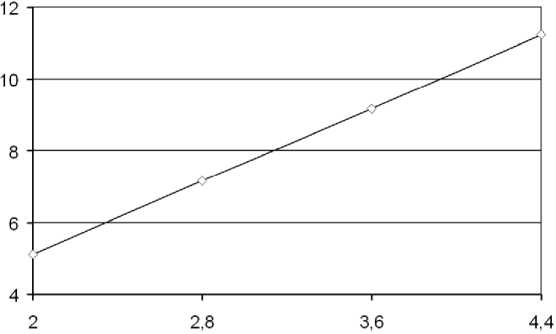
Q , т/ч
б )
Рис. 4. Зависимость величины угловой скорости 0) барабана разрушителя тюков от длины l захвата тюка пальцами разрушителя ( а ) и подачи Q тюков соломы к разрушителю ( б ): z = 16 шт., r = 0,51 м
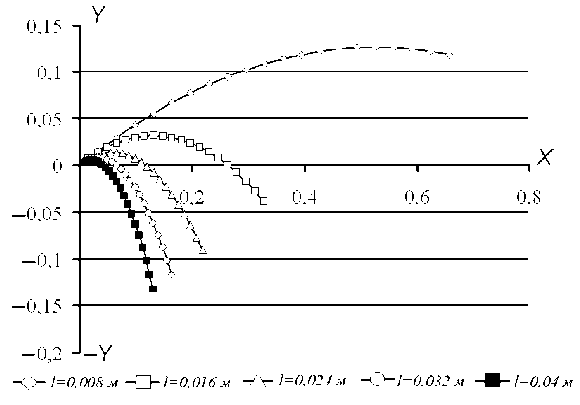
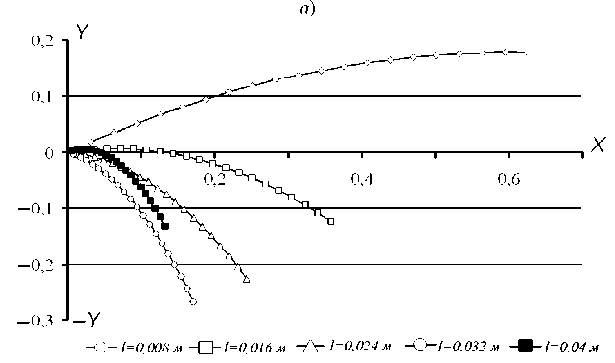
Участок пальца длиной l , захватывающий соломины из тюков, как показано выше, влияет на скорости и направления выброса соломин с пальцев. От этого, очевидно, зависят и траектории перемещения соломин в воздушном пространстве после их выброса с концов пальцев разрушителя тюков (рис. 5).
-
б )
Рис. 5. Траектория перемещения соломин длиной 500 мм, выброшенных с пальца разрушителя в точке О3 под углом у1 = 25,5830 ( a ) и в точке О 2 под различными углами у (б), для различных длин l захвата тюка пальцами разрушителя: Q = 2,8 т/ч, z = 16 шт., Y 2 = 0,05 м
Итак, соломины попадают в начало пальцев, закрепленных на барабане радиусом r (рис. 2). Время t 1 перемещения этих соломин определяет поворот пальцев с барабанами вокруг точки О на угол w · t 1 > р1. Затем соломины выбрасываются с пальцев в точке О 2 под различными углами у к оси x 1 . Это и определяет зависимость углов у , скоростей V выброса соломин и, соответственно, траектории полета соломин в воздушном пространстве (рис. 5, б).
Анализ этих траекторий с учетом их попаданий на последующий рабочий элемент позволяет предварительно выбрать рациональную длину l = 0,016 м.
Выводы . Найдены закономерности разрушения тюков соломы барабанным разрушителем с радиальными пальцами и с горизонтальной осью вращения. Полученные данные показывают, что при различных задаваемых подачах Q ТЮКОВ соломы к их разрушителю длина l рабочей зоны захвата пальцами соломин из тюка существенно влияет на его разрушение, перемещение соломин по пальцам и на траектории их перемещения в воздушном пространстве. При увеличении длины l падает угловая скорость барабана разрушителя тюков, изменяются координаты, уменьшается скорость выброса соломин с концов пальцев и снижается к горизонту траектория летящих соломин.
Ограничение длины l рабочей зоны пальцев определяется условием захвата ими из тюков малого количества соломин (1–3 шт.). Таким образом создаются условия для их дальнейшей рациональной ориентации на сепараторе рассматриваемой технологической линии УРТС .
Список литературы Параметрический анализ устройства для разрушения тюков соломы
- Вероятностная модель процесса продольной ориентации стеблей зерновых культур/Ю. И. Ермольев //Технологические операции и технические средства для современных технологий агропромышленного комплекса. -Ростов-на-Дону: Издательский центр ДГТУ, 2012. -С. 48-62.
- Формирование вариантов структуры и функциональной схемы технологической линии для измельчения и сепарации соломистого вороха/Ю. И. Ермольев //Состояние и перспективы развития сельскохозяйственного машиностроения: мат-лы 6-й междунар. науч.-практ. конф. -Ростов-на-Дону: Изд. центр ДГТУ, 2013. -С. 17-23.
- Яковлев, А. В. Параметры и режимы работы универсального измельчителя стеблевых кормов и подстилки с вертикальным бункером и ротором молоткового типа: дис. … канд. техн. наук/А. В. Яковлев. -Зерноград, 2014. -160 с.
- Taarup Foragen haznew cutting concept/ed. D. Gordon. -London: The Scottish Farmer, 1983. -P. 90-93.
- Mobile Futterungssysteme/J. van der Maas //FAT-Berichte. -1998. -№ 522. -P. 1-14.
- Marous, B. von. Anmerkungen zur Beurteilung von Hammermuhle/B. von Marous//Die Muhle Mischfuttertechnick. -1970. -№ 9. -P. 209-212.
- Vob, U. von. Schrotmühlen und Futtermischer//Grundlagen des Landtechnik. -1974. -№ 8. -P. 649-352.
- Sebestuen, E.-J. Grinding of animal feeding stuffs/E.-J. Sebestuen//Journal of Flaut and Animal Feed Milling. -1974. -№ 5. -P. 649-352.
- Оценка закономерностей процесса разрушения тюков соломы барабанными разрушителями/Ю. И. Ермольев //Инновационные технологии в науке и образовании: сб. науч. тр. ИТНО-2014. -Ростов-на-Дону, 2014. -С. 248-254.
- Василенко, П. М. Теория движения частицы по шероховатым поверхностям сельскохозяйственных машин/П. М. Василенко. -Киев: УАСХН, 1960. -283 с.
