Параметрический радиолокационный метод обнаружения малых беспилотных летательных аппаратов с использованием узкополосных квазинепрерывных сигналов

Автор: Когтин А.В., Фомин А.Н., Лой В.В., Шайдуров Г.Я., Чаринцев Д.А., Копылов В.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.15, 2022 года.
Бесплатный доступ
В статье рассматривается метод обнаружения малых беспилотных летательных аппаратов (МБЛА) с эффективной площадью рассеивания (ЭПР) менее 0,1 м2, узкополосной РЛС с использованием квазинепрерывного сигнала.Предлагается структурная схема радиолокационной станции, энергетическая оценка чувствительности метода для случая использования узкополосной РЛС с квазинепрерывным излучаемым сигналом. Показано, что РЛС с непрерывным сигналом может быть реализована как малоразмерная, компактная мобильная РЛС с мощностью излучения 5-10 мВт и дальностью обнаружения до 10 км.
Квазинепрерывный сигнал, автодинный принцип работы, частота вращения винтов, биения винтов летательных аппаратов
Короткий адрес: https://sciup.org/146282412
IDR: 146282412 | УДК: 621.396.96
Parametric radar method for detecting small unmanned aircraft system using narrow-band quasi-continuous signals
The article discusses a method for detecting small unmanned aircraft system (MBLA) with an effective scattering area (ESR) of less than 0.1 m2, a narrow-band radar using a quasi-continuous signal. A block diagram of a radar system, an energy sensitivity assessment of the method for the case of using a narrow-band radar system with a quasi-continuous radiated signal is proposed. It is shown that a continuous signal radar system can be implemented as a small-sized, compact mobile radar system with a radiation power of 5-10 MW and a detection range of up to 10 km.
Текст научной статьи Параметрический радиолокационный метод обнаружения малых беспилотных летательных аппаратов с использованием узкополосных квазинепрерывных сигналов
Цитирование: Когтин, А. В. Параметрический радиолокационный метод обнаружения малых беспилотных летательных аппаратов с использованием узкополосных квазинепрерывных сигналов / А. В. Когтин, А. Н. Фомин, В. В. Лой, Г. Я. Шайдуров, Д. А. Чаринцев, В. А. Копылов // Журн. Сиб. федер. ун-та. Техника и технологии, 2022, 15(2). С. 216–222. DOI: 10.17516/1999-494X-0384
Известно, что особенностью тактики использования разведывательных и боевых МБЛА является работа на небольших высотах, порядка 100–2000 м, при скоростях полета до 100 км/ч, в том числе и в режиме зависания, когда скорость летательного аппарата (ЛА) близка к нулю. При этом ЭПР объекта радиолокации находится в пределах менее 0,1 м2, что не дает возможности их обнаружения традиционной импульсной техникой радиолокации, а использование миллиметрового или оптического диапазона связано с существенным влиянием метеоусловий [1–4].
В источниках [5–7] описывается метод обнаружения подобных целей с использованием РЛС автодинного типа и приводятся данные экспериментов в лабораторных условиях, осуществленных в лаборатории радиолокации Сибирского федерального университета в 2015 г. Эти эксперименты показали, что самолетная модель МБЛА четко идентифицируется с дистанции 10–15 м автодинной РЛС на рабочих частотах 2,5 и 10 ГГц путем выделения частоты вращения винтов, как металлических, так и пластмассовых.
На рис. 1 показана структурная схема РЛС с мощностью передатчика до 5 мВт при использовании зеркальной антенны площадью 1 м2 с двумя вибраторами, формирующей две взаимно ортогональные диаграммы направленности. Поскольку применяется автодинный принцип работы, то структура приемника представляется предельно простой. Сигналы с двух – 217 – взаимно ортогональных вибраторов антенны (1) поступают непосредственно на смеситель (2) и далее на фильтры низких частот (3). Фильтры низких частот, настроенные каждый на свою частоту F1, F2, пропускают принятые сигналы на фазовые детекторы, где выделяются их огибающие, и далее через аналого-цифровой преобразователь (5) поступают на пороговое устройство (6), где принимается решение о наличии цели или ее отсутствии. С выхода порогового устройства полезный сигнал поступает на микропроцессор, где осуществляется его цифровая обработка, и далее на устройство отображения (7) в виде спектра, как видно на рис. 2, 3.
Как изображено на рис. 2, частота вращения винтов четко проявлялась в виде дискретных линий спектра, а смена винтов модели МБЛА с металлических на пластиковые в целом мало отражалась на их амплитуде.
Дадим энергетическую оценку дальности действия автодинной РЛС в зависимости от диапазона используемых частот.
При мощности излучения передатчика P пер , ЭПР цели σ ц = 0,1 м2, эффективной площади антенны S пр = S пер = 1 м2 мощность принятого сигнала P пр на дистанции R для данной рабочей
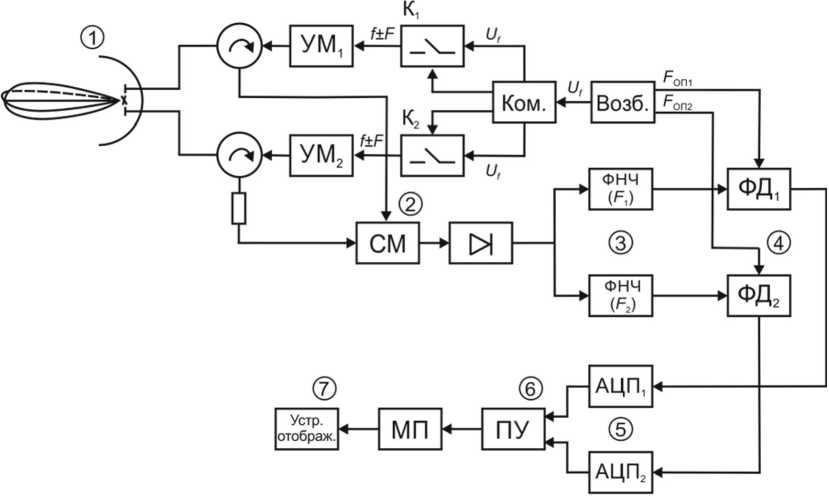
Рис. 1. Структурная схема узкополосной РЛС с квазинепрерывным излучаемым сигналом
Fig. 1. Block diagram of a narrowband radar with a quasi-continuous radiated signal
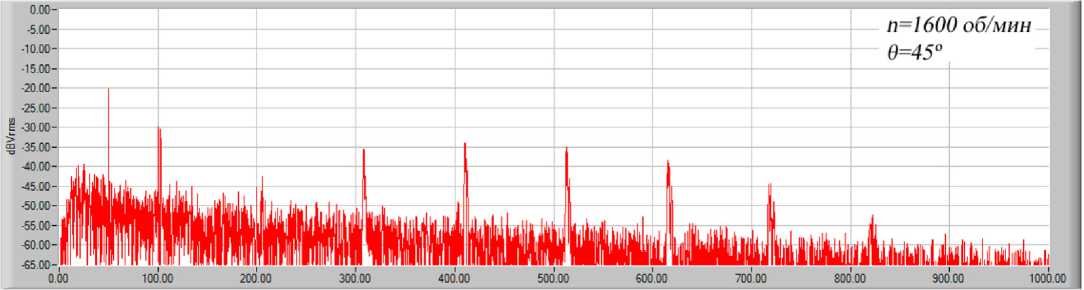
Рис. 2. Спектры принимаемых сигналов с дисплея (материал винта – диэлектрик)
Fig. 2. Spectra of received signals from the display (screw material – dielectric)
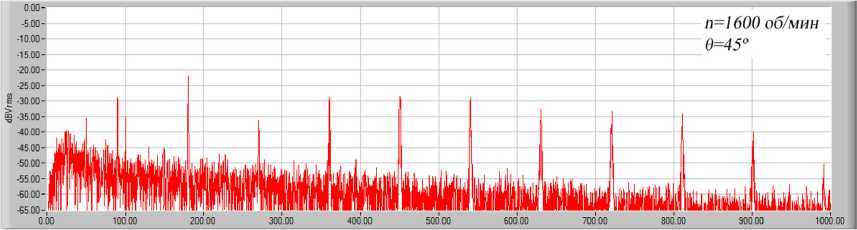
Рис. 3. Спектры принимаемых сигналов с дисплея (материал винта – углепластик)
Fig. 3. Spectra of received signals from the display (the screw material is carbon fiber)
длины волны λ можно оценить через уравнение радиолокации для случая отражения от корпуса МБЛА, которое имеет вид
(4лг2)2 ’ (1)
где P пер - мощность передатчика; G = 4тт-^ — коэффициент направленности действия передающей антенны; оц - эффективная площадь рассеяния цели; Sпр, S пер - эффективные площади приемной и передающей антенн соответственно; r - расстояние до цели; к - коэффициент поглощения радиоволн в среде распространения.
Коэффициент к можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Для случая использования сигнала, отраженного от винта МБЛА, как элементарного вибратора с длиной L уравнение радиолокации можно получить через оценку плотности потока мощности волны передатчика в районе цели:
П1=^е-2кг (2)
Е2 В
Поскольку П1 = — (—), где Wc = 377 Ом - волновое сопротивление пространства, то от сюда напряженность поля радиоволны в районе винта
Ei = V^ (В/м). (3)
Тогда напряженность поля, отраженного от винта, составляет Е2 = EiL, а мощность отра женного от винта сигнала
№L)2 П^ _
Р = Х Х L 7 2
2 “ ^ - v/B
Мощность сигнала на входе приемника такова:
Р _ ^mV^iip WCL2 -2kr
2r (4nr2)2 Wv
Для оценки P2v можно воспользоваться также формулой (1) с подстановкой ЭПР винта σ данной в справочнике [8]. Далее можно оценить потери в мощности сигнала через оценку соотношений (1) и (5):
_ WCL2
^np О ( Wv ^
При W c = 377 Ом, Wv = 75 Ом, σ ц = 0,1 м2, L = 0,2 м получим:
P2u _ 377*0,04
Pnp “ 75*0,1
Таким образом, мощность отраженного сигнала от винта в два раза выше, чем от корпуса цели.
Дадим численную оценку минимальной требуемой мощности передатчика в автодинном и импульсном режимах на дальности r = 10 км при λ = 3*10–2 м, Sa = 1 м2, σц= 0,1 м2. В этом случае
5 1
G = 4л= 4л------г = 1,4 * 104 л 2 9* IO"4
Согласно (1) для автодинного режима без учета потерь в среде
_ Рш(4лг2)2 "nep - q
4 = ^ = ic. Мощность шумов
^^пр^ц
Здесь заданное соотношение сигнал/шум на входе приемника на входе приемника определяется выражением Рш = /сТ«Д/, где k = 1,38∙10–23 Вт/Гц∙град – постоянная Больцмана; T° - 300°K – относительная температура шума по Кельвину; Δf = 1 Гц – полоса пропускания приемника.
После подстановки исходных параметров в выражение (8) получим:
PneD = io Рш = 1.38 * 10"23 * 300 * 1 = 4.2 * 10"21 Вт, neP l,4*104*l*0,l ’ ш
1.6 *4.2* IO"2 £Pa =--------------= 4.8 * IO"6 Вт.a 1.4 *104
Для импульсного режима при длительности импульса τ = 3 * 10–6 с и накоплении в при-
T 1
емнике пачки из h = — = , = 1.5 * 10bимпульсов
28 6 * IO"6 3
p .
1 nept
= ^nep---IT----5 = — * 10 = 4,44 Pt.
nep 3*10-6*1,5*10s 4.5 1
Как видим, проигрыш по мощности передающего устройства импульсного режима авто-динному режиму составляет более чем в 4 раза.
На дистанции r = 10 000 м запаздывание радиосигнала по времени составляет
T = 10–4 c, а длительность импульсов при разрешении по дальности Δ r = 100 м должна быть
Ar 100
не менее чем -- = 7--7777 = 0-3 ИКС.
c 3 * 10H
Оттуда требуемая полоса пропускания приемника должна составлять A/M = 3 * _6 = 3.3 * 106 Гц.
Следовательно, уровень шума возрастет в 10 раз и проигрыш автономному параметрическому режиму возрастет до 40 раз. При этом длительность импульса передатчика должна быть короткой (300 наносекунд), что сложнее реализовать. В этом случае обнаружение цели по частотам вращения винта потребует в приемнике демодуляции по амплитуде пачки импульсов.
Представленная схема построения РЛС и сравнительная энергетическая оценка непрерывного и импульсного режимов радиолокации показывают явные преимущества первой по обнаружению летательных аппаратов с ЭПР менее 0,1 м2.
Список литературы Параметрический радиолокационный метод обнаружения малых беспилотных летательных аппаратов с использованием узкополосных квазинепрерывных сигналов
- Ананьев А. В., Рыбалко А., Рязанцев Л., Клевцов Р. Применение разведывательно-ударных групп беспилотных летательных аппаратов малого класса по объектам аэродромных участков дорог. Военная мысль, 2020.
- Казарьян Б. И. Беспилотные аппараты: способы применения в составе боевых систем (Техника и вооружение). Военная мысль, 2012, 3, 21-26.
- EDN: PAYCWV
- Денисов Б., Жмеренецкий В. Беспилотные летательные аппараты вооруженных сил Великобритании (Военно-воздушные силы). Зарубежное военное обозрение, 2018, 11, 56-66.
- Сенченко В. Израильские ударные беспилотные летательные аппараты (Военно-воздушные силы). Зарубежное военное обозрение, 2017, 10, 70-71.
- Методы обнаружения маловысотных, малоскоростных целей на фоне подстилающей поверхности. Сборник материалов ХХХIХ НТК ВАВКО, секция № 8, Тверь, 2009, 256-258.
- Бузыкин В. Т., Носков В. Я. Автодины. Области применения и перспективы развития. Радиотехнические системы миллиметрового и субмиллиметрового диапазонов волн. Сборник научных трудов. Харьков, 1991, 38-47.
- СФУ RU. Патент 2 622 608 (РФ) от 21.06.17, МПК G 01 S13/52. А. Фомин, Г. Шайдуров, Е. Гарин. Радиолокационный способ обнаружения летательных аппаратов / Заявка 2016127479. Приоритет 07.07.2016.
- Гершензон Е. М., Туманов Б. Н., Бузыкин В. Т. и др. Общие характеристики и особенности автодинного эффекта в автогенераторах. Радиотехника и электроника, 1982, 27(1), 104-112.
