Параметризация моделей управляемых систем

Автор: Новоселов А.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Кибернетика, системный анализ, приложения
Статья в выпуске: 5 (31), 2010 года.
Бесплатный доступ
Описывается применение метода ортогональных рядов для построения моделей управляемых систем параметрического вида в условиях непараметрической неопределенности. Ключевым элементом метода является выбор длины ортогонального ряда по данным наблюдений, т. е. определение параметрической структуры модели. Продемонстрировано применение метода к оцениванию плотности распределения и функции регрессии. Предложены пути обобщения оценок на многомерный случай.
Плотность распределения, функция регрессии, ортогональный ряд, непараметрическая оценка
Короткий адрес: https://sciup.org/148176356
IDR: 148176356 | УДК: 62-50:519.224
Parametrization of models of controlled systems
The paper describes application of orthogonal series method for construction of controlled systems models under non-parametric uncertainty. A key element of the method is draw of orthogonal expansion length based on observations, in other words, defining parametric structure of the model. The method is demonstrated for estimation of distribution density and regression function. Directions for generalizing onto multi-dimensional case are also presented.
Текст научной статьи Параметризация моделей управляемых систем
В классической теории управления [1] обычно используются параметрические модели, которые строятся в условиях параметрической неопределенности. Здесь предполагается известным факт принадлежности модели к некоторому заранее определенному конечномерному классу моделей. Процедура идентификации (оценивания) модели сводится при этом к оцениванию по данным наблюдений некоторого конечного набора параметров.
Столь полную априорную информацию можно считать доступной далеко не всегда, поэтому параллельно развивается и непараметрическая теория управления [2; 3], в которой априорный класс моделей предполагается бесконечномерным; при этом говорят о непараметрической неопределенности. Малое количество априорной информации приходится компенсировать при этом большим количеством статистических наблюдений.
Основными строительными блоками для создания математических моделей систем управления по наблюдениям являются оценки плотности распределения и функции регрессии [1–3]. Непараметрическая оценка плотности распределения ядерного типа была впервые рассмотрена в [4; 5], а соответствующая непараметрическая оценка функции регрессии – в работах [6; 7].
Классические параметрические оценки этих функций гораздо проще для человеческого восприятия и лучше приспособлены для анализа, чем непараметрические оценки. Поэтому постоянно предпринимаются попытки построения оценок параметрического вида в условиях непараметрической неопределенности. Это направление можно назвать параметризацией моделей.
Одной из ветвей этого направления является использование оценок в виде отрезков ортогональных рядов, называемых еще проекционными оценками ввиду прозрачной геометрической аналогии. Оценка такого типа для плотности распределения была предложена Н. Н. Ченцовым в [8], а оценка для функции регрессии – в [9].
Проекционные оценки были подвергнуты тщательному изучению. Так, в статьях [10–13] исследовались вопросы сходимости оценок в различных смыслах, в публикациях [14; 15] проводилось сравнение различных непараметрических оценок. В [16–19] исследовались проекционные оценки в конкретных базисах. Во всех этих исследованиях длина отрезка ортогонального ряда выбиралась произвольно. В работах [20–24] предложен некий принцип оптимального выбора длины отрезка ортогонального ряда в проекционных оценках, исследованы свойства получаемых оптимальных проекционных оценок. В настоящей работе приведен обзор результатов [20–24], и представлены соображения по поводу обобщения оптимальных проекционных оценок на многомерный случай.
Проекционное приближение. Пусть Lr2 – гильбертово пространство функций f, заданных на подмножестве U вещественной оси и интегрируемых с квадратом с весом r в смысле f f 2(x)r (x)dx <”,
U где r – неотрицательная весовая функция на U. Скалярное произведение и норма задаются в Lr2 выражениями:
( f , g ) = J f ( x ) g ( x) r ( x ) dx , Il f 11= V ( f , f ).
U
Любая функция f из L r 2 представима в виде ряда [25]
f (x) = 2 ajgj( x), j■=0
в смысле сходимости последовательности его частич- ных сумм
N fN (x ) = 2ajgj( x )
j = 0
по норме пространства Lr 2 , что означает || f - fN\\ ^ 0 при N ^ -а Здесь G = { g j , j = 0, 1, ...} обозначена произвольная полная ортонормированная система в L r 2 , а a j = ( f , g j ), j = 0, 1, … представляют собой коэффициенты Фурье функции f относительно системы G .
Выбор ортонормированной системы G зависит от конкретной задачи; в различных ситуациях могут быть использованы, например, классические ортогональные многочлены [26] или тригонометрическая система функций [27].
Оценка плотности распределения. Пусть X , X 1, …, Xn , … – последовательность независимых, одинаково распределенных на U с R случайных величин, и пусть распределение X имеет неизвестную плотность f . Рассмотрим задачу оценивания неизвестной плотности распределения f по выборке наблюдений X 1, …, Xn объема n в ситуации, когда априори неизвестен какой-либо конечномерный класс плотностей, которому заведомо принадлежит f , т. е. в ситуации непараметрической неопределенности.
В [4; 5] для этого была предложена ядерная оценка плотности f ГxXL)
fn. h (x) , 2K I L I nh'=i 1 h 7 (2)
1 n
=-2 Kh (x - XD, xe U, n i=i где K – некоторая плотность распределения на R, называемая ядром оценки, Kh(u) = K(u/h)/h; h – параметр оценки, называемый параметром размытости или параметром ширины окна.
В [8] рассматривалась проекционная оценка плотности, основанная на отрезке ряда (1), в котором коэффициенты Фурье a j заменены на оценки по выборке наблюдений вида
n aj = - 2 gj( Xi) r (Xi), j = 0,1, -n i=i
Таким образом, проекционная оценка плотности имеет вид
N
-
f , N ( x ) = 2 a lj g j( x ), x e U . (3)
j = 0
Отметим, что в результате несложных преобразований эту оценку можно представить следующим образом:
n f., N (x) = - 2 Kn (x, Xi), n i=i
N
K n ( x , u ) = 2 g j ( x ) g j ( u ) r ( x ), x , u e U .
j = 0
Это представление по виду напоминает второе представление в оценке (2), как среднее выборочное значение некоторого ядра. Существенное отличие состоит в том, что ядро в последнем выражении не является плотностью распределения, в частности, оно может принимать отрицательные значения. Таким же недостатком обладает и проекционная оценка (3), она не является, вообще говоря, плотностью распределения, поскольку может принимать отрицательные значения. В некоторых случаях избавиться от этого недостатка позволяет следующий прием. В качестве оценки плотности рассматривается среднее арифметическое первых частичных сумм ряда
N fn,n (x)=iftt2 fn,j(x), x e U.
N + 1 j = 0
Такой прием позволяет обеспечить неотрицательность оценки плотности, например, при использовании тригонометрической ортонормированной системы [27]. При этом оценка оказывается построенной посредством так называемых сумм Фейера [27].
Длина разложения N выбирается в [8] произвольно, там также приводятся некоторые асимптотические соображения по поводу выбора N . В работах [20–22; 24] предложен и исследован оптимальный принцип выбора длины отрезка ряда, основанный на следующем наблюдении. Обозначим t j = g j ( X ) r ( X ), j = 0, 1, … и вычислим среднеквадратичное отклонение проекционной оценки плотности (3) от неизвестной плотности f . Получаем выражение
2 NN
T n (N ) = Sf - Ц =1 f Г - nT 2 a 22+ - 2 Et 2,- (4)
n j = 0 n j = 0
Оказывается [20; 24], что величина T n ( N ) при фиксированном n достигает минимума по N , это означает, что при любом объеме выборки имеется оптимальная длина отрезка ряда в проекционной оценке (3), причем оптимальность понимается в смысле среднеквадратического критерия (4). Для приближенной минимизации критерия (4) с использованием выборки наблюдений заметим [20; 24], что слагаемое ║f║ в правой части (4) не влияет на положение точки минимума, и его можно отбросить, а остальные члены оцениваются следующим образом:
~ n n + 1 ^ a 2 2 N -
T n ( N ) =-- 2 a 2 +- 2 1
n j = 0 n j = 0
~”
j ,
n tj=12 g j( X) r ^( X).
n t1
Минимизация Tˆn (N) по N дает оптимальное значение Nˆ длины отрезка ряда, подстановка которого в выражение (4) дает оптимальную проекционную оценку ■ N f (x)=Zajgj(x), xe U. (6)
j = 0
В качестве примера рассмотрим тригонометрическую ортонормированную систему на [–1; 1], которая состоит из функций j 2,sin(njx ),cos(njx), x e [-1; 1], j = 1,2, „.j.
При использовании этой ортонормированной системы удобно включать члены в ортогональное разложение парами, при этом оптимальная проекционная оценка приобретает вид
-
1 N ˆ
f(x) = + Z(Cjcos(njx) + S/sinm/x))-
-
2 j = i
Здесь
1n1
Cj = - Z cos( n /X i ), v Z sin( n /X i ), j = 1, 2, —
П i=1
Рассмотрим случайную величину X , имеющую распределение с треугольной плотностью на [–1; 1], т- е- fx ) = 1- |x| , x e [ - 1;1]- Методами статистического моделирования нетрудно получить выборку наблюдений такой случайной величины, для целей иллюстрации мы возьмем объем выборки равным n = 50. График оценки критериальной функции (5), построенный по полученной выборке, приведен на рис. 1. Видно, что в оптимальное разложение входит только первая пара тригонометрических функций ( N = 1). Графики модельной плотности распределения f и ее оптимальной проекционной оценки показаны на рис. 2. С ростом объема выборки качество оценивания довольно быстро возрастает. Более подробный анализ оптимальных проекционных оценок плотности можно найти в работах [20–24].
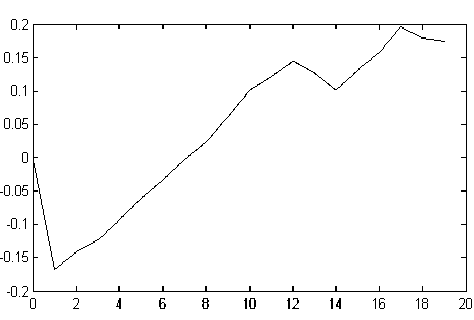
Рис. 1. График оценки критериальной функции (5), построенный по выборке наблюдений объема n = 50
Оценка функции регрессии. Пусть теперь (X, Y), (X1, Y1), …, (Xn, Yn), … – последовательность незави- симых одинаково распределенных случайных векторов. Обозначимfx) = E(Y\X = x), x e U функцию регрессии Y на X. Для непараметрического оценивания этой функции по наблюдениям (Xi, Yi), i = 1, …, n в [6; 7] была предложена ядерная оценка
— 'Zy^K I x—Xi-nh и I h
f ( x ) =
1 5 f x - X,) , z K I I
nh h i=1
x e U .
Здесь объекты K , h имеют тот же смысл, что и для ядерной оценки плотности (2).
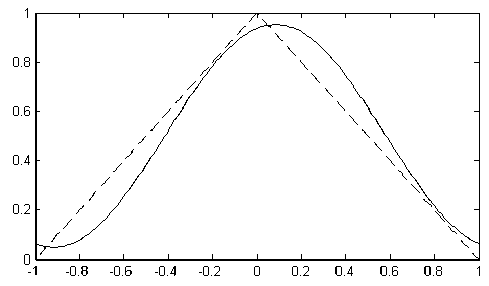
Рис. 2. График модельной треугольной плотности распределения и ее оптимальной проекционной оценки (7), объем выборки n = 50
Для простоты предположим, что U = [0; 1] и случайная величина X имеет равномерное распределение на [0; 1] так, что ее плотность равна P(x) = 1, x e [0; 1]. Положим также, что весовая функция постоянна: r(x) = 1, x e[0;1]. При этом коэффициенты Фурье имеют вид aj = j f (x)gy(x)dx = E(Ygj(X)), j = 0, 1, ^ 0
Поэтому проекционная оценка функции регрессии имеет вид (3), где оценки коэффициентов Фурье вычисляются по формулам:
n aj= - Z Yg( X,), j = 0,1, -n ,=1
Все свойства критерия выбора длины ортогонального разложения сохраняются и в случае оценивания функции регрессии, оптимальная проекционная оценка вычисляется по той же формуле (6), а качество приближения получается даже лучше, чем для плотности распределения, что связано со спецификой данной задачи.
Случай известной, но не равномерной плотности распределения X отличается лишь повышенной громоздкостью формулировок. В случае неизвестной плотности X можно использовать фейеровские оценки [23; 24].
Многомерное обобщение. Представляет интерес обобщение описанных оценок на многомерный случай, когда область распределения случайной величи- ны X имеет размерность, превышающую 1. Для осуществления такого обобщения по существу нужно лишь уметь строить многомерные ортонормирован-ные системы. Это легко достигается на основе одномерных ортонормированных систем, что мы и продемонстрируем для двумерного случая.
Пусть { g j (x ), j = 0, 1, ■■■}> x e U и { h k (y ), k = 0, 1, ...}, y e V - одномерные полные ортонормированные системы на соответствующих областях определения. Тогда полная ортонормированная система на U × V образуется из всевозможных произведений одномерных функций, а именно:
Gjk( x, y ) = gj( X) hk (y), j = 0,1, ^, k = 0,1, _,(x, y) e U X V.
Следует иметь в виду, что с ростом размерности очень быстро нарастают комбинаторные сложности в вычислении ортонормированных функций, поэтому применимость описанного способа оценивания в пространствах высокой размерности сомнительна. Кроме того, метод проекционного оценивания не обладает свойствами локальных оценок, вследствие чего не может использовать «трубчатое» строение выборочных данных. По-видимому, возможно построение специальных ортонормированных систем, адаптированных под имеющуюся структуру данных, что позволит использовать такое специальное строение, однако, нам неизвестны исследования в этом направлении.
В работе дан краткий обзор оптимальных проекционных оценок плотности распределения и функции регрессии, которые применяются при построении моделей управляемых систем по наблюдениям. Описаны основные алгоритмы, участвующие в построении оценок, приведены примеры и иллюстрации. Отмечается возможность многомерного обобщения процедуры оценивания и имеющиеся ограничения по размерности.
