Параметризация управляющих объектов урбанизированной территории

Автор: Михеева Татьяна Ивановна, Михеев Сергей Владиславович, Головнин Олег Константинович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Перспективные информационные технологии
Статья в выпуске: 2-5 т.17, 2015 года.
Бесплатный доступ
В статье описывается атрибутно-ориентированная декомпозиция модели транспортного потока, определены параметры управляющих объектов урбанизированной территории, рассмотрен метод выбора релевантных параметров.
Параметризация объекта, управление транспортными потоками, атрибутно-ориентированное проектирование, анализ транспортной инфраструктуры, модель транспортного потока
Короткий адрес: https://sciup.org/148203703
IDR: 148203703 | УДК: 004.415.2
Parameterization of urbanized terrain control objects
The article describes the attribute-driven design of traffic flow model, parameters of urbanized terrain control objects, considered method of relevant parameters selecting.
Текст научной статьи Параметризация управляющих объектов урбанизированной территории
Наличие эффективных методов оценки проектов развития улично-дорожной сети (УДС) урбанизированной территории необходимо для усовершенствования транспортной инфраструктуры (ТрИ). Возможность на начальной стадии проектирования оперативно и достоверно оценить влияние изменений на УДС в целом – одна из важнейших задач, стоящих перед центрами организации движения [2, 10]. Выбор из множества вариантов развития ТрИ требует разработки и применения моделей транспортного потока (ТП), адаптированных к реальным условиям современного города.
В управлении дорожным движением существует ряд специфических задач [6,10], решение которых продиктовано применением технических средств организации дорожного движения (ТСОДД):
-
- дислокация объектов ТрИ на УДС урбанизированной территории;
-
- разделение движения ТП в пространстве;
-
- разделение движения ТП во времени;
-
- факторизация ТП;
-
- регулирование и оптимизация скоростей;
-
- оптимизация стояночного режима.
Решение перечисленных задач основано на модели управляющего воздействия ТСОДД на ТП или отдельное транспортное средство. Построение такой модели требует определение вида компоновки нескольких объектов в группу и зоны распространения управляющего воздействия.
Модель управляющего воздействия ТСОДД на ТП представляется триадой:
М УВ = < М ТСОДД , М КО , М ЗУВ > , где МУВ – модель управляющего воздействия технического средства организации дорожного движения на транспортный поток,
МТСОДД – модель технического средства организации движения,
МКО – модель компоновки объектов ТСОДД,
МЗУВ – модель зоны управляющего воздействия.
Модель компоновки объектов ТСОДД описывает взаиморасположение объектов и способ их группировки для определения зоны управляющего воздействия. Светофор или дорожный знак могут, как располагаться на участке УДС в одиночном исполнении, так и быть сгруппированными. Дорожные знаки могут быть сгруппированы на одной общей опоре, на перегоне, на перекрестке.
Модель зоны управляющего воздействия характеризует часть УДС, на которую распространяется действие установленного ТСОДД. Зона управляющего воздействия определена сечением, перегоном, перекрестком, магистралью и всей транспортной сетью. Сечением назовем воображаемую линию, перпендикулярную направлению движения транспортного потока, пересекающую участок УДС. Сечение может являться верхней или нижней границей зоны управляющего воздействия. Например, зоной действия дорожного знака «Ограничение высоты» является сечение дороги, для которого существует подобное ограничение; светофор воздействует на участок, на котором он установлен – это перегон или перекресток; дорожный знак «Главная дорога» может распространять свое действие как на один участок «перегон», так и на несколько участков УДС, начиная с того участка, на котором он установлен до его отмены. Участки, на которые распространяется управляющие воздействие ТСОДД, образуют зону его действия.
По функциональному назначению модели ТП, применяемые для анализа ТрИ урбанизированной территории, можно разделить на три класса [9]:
-
- прогнозные, предназначенные для оценки изменений в размещении объектов транспортного спроса;
-
- имитационные (модели динамики ТП), предназначенные для анализа ТП во времени;
-
- оптимизационные, предназначенные для усовершенствования маршрутов перевозок, светофорных циклов, конфигурации УДС.
Актуальной задачей является разработка систем автоматизированного управления ТрИ в режиме реального времени. К такому классу систем относится интеллектуальные транспортные системы (ИТС). ИТС, как наиболее совершенные и современные средства управления движением используют информацию с датчиков в сочетании с динамическим имитационным моделированием и базой данных объектов ТрИ [10], обеспечивают различные человеческие и человеко-машинные взаимодействия. Важно определить динамические имитационные модели, обладающие возможностью применения в ИТС, позволяющие учитывать управляющие воздействия ТСОДД на ТП [1]. Применение моделей динамики ТП в ИТС позволит организовать эффективное управление ТП, оценить изменение скорости, плотности, интенсивности ТП, рассчитать транспортные задержки, выявить образование очередей, заторов. Сложность управляющих воздействий ТСОДД, недетерминированность их воздействия на ТП, определяют необходимость создания модели динамики ТП, ориентируясь на параметры объектов ТрИ – атрибуты.
Значениями атрибутов в разрабатываемой модели ТП могут быть целые и действительные числа, множества чисел, символов и строк, логические величины и другие объекты, находящиеся в отношении «has-a» с объектами описываемого класса. Ограничения в системе представляют собой математические соотношения, связывающие атрибуты объекта. Соотношения в системе включают линейные и нелинейные уравнения, неравенства, логические утверждения, теоретико-множественные конструкции и табличные отношения. Совокупность ограничений задает модель объекта.
С целью разработки динамической модели ТП, подходящей для использования в разра- батываемой ИТС и применения алгоритмов управления из [4], в соответствии с принципами атрибутно-ориентированного проектирования (рис. 1) проведена атрибутно-ориентированная декомпозиция модели ТП (рис. 2). В модели выделены атрибутные составляющие и основные макрохарактеристики ТП. Атрибутно-ориентированная декомпозиция, помимо анализа самих атрибутов, требует анализа ограничений на атрибуты. Такой анализ выполнен на основе методических документов, действующих в сфере организации дорожного движения.
Для уменьшения размерности анализируемой модели ТП, удаления нерелевантных атрибутов, решения проблемы мультиколлинеарности применяется метод выбора признаков [3]. Под мультиколлинеарностью понимается наличие сильной корреляционной связи между анализируемыми атрибутами, совместно воздействующими на целевой вектор характеристик. Такая связь затрудняет оценивание характеристик и выявление зависимости между атрибутами и целевым вектором [3, 6, 7].
Примененный метод выбора атрибутов использует модификацию генетического алгоритма, описанного в [7]:
-
1. Инициализация: выбор доли кроссингове-ра CF, создание начальной популяции моделей случайным образом.
-
2. Проверка условия завершения алгоритма: превышено допустимое число итераций алгоритма N или изменение суммы квадратов регрессионных остатков SSE оказалось недопустимо малым.
-
3. Селекция: выбирается F лучших моделей с минимальной суммой квадратов регрессионных остатков SSE.
-
4. Отбор: Выбирается F1 случайных моделей для скрещивания и мутации.
-
5. Скрещивание: каждая аллель случайным образом заполняется геном одного или другого родителя.
-
6. Мутация: для каждой модели в каждой аллели с вероятностью P2 происходит случайная равновероятная замена текущего гена на 0 или 1.
-
7. Возврат к шагу 2.

Рис. 1. Схема применения атрибутно-ориентированного проектирования

Рис. 2. Декомпозиция модели транспортного потока
На этапе подготовки данных необходимо количественно оценить качественные атрибуты модели [5]. Каждый качественный атрибут оценивается относительным показателем K, характеризующим уровень измеряемого атрибута, и вместимостью M, характеризующей сравнительную важность атрибутов. Относительные показатели K и вместимости M для каждого атрибута модели получены методом экспертных оценок.
В соответствии с методами и алгоритмами, описанными в [8], проводится обследование УДС с целью идентификации геоинформацион-ной модели ТрИ [10], позволяющей построить атрибутно-ориентированную модель ТП, оперирующую агрегированной атрибутной, семантической, геопространсвенной информацией в едином информационном пространстве ИТС.
Для сбора и обработки данных о параметрах УДС применяется система автоматизированного проектирования паспортов автодорог «Веймарк». «Веймарк» позволяет получить геопривязанную информацию о ровности и келейности полотна автодороги (рис. 3), используя информацию с лазерного сканера передвижной автомобильной лаборатории. Фотограмметрические функции системы используются для определения ширины проезжей части (рис. 3) и габаритных ограничений по высоте.
Определение параметров улично-дорожной сети в плане, профиле и уровне выполняется модулями анализа треков перемещения передвижной лаборатории. Трек, используемый при определении атрибутов УДС, получен при помощи усреднения значений с трех GNSS-приемников и инерциальной навигационной системы.
Уровень прохождения проектной линии автодороги (рис. 4) описывает перепад высот, который должен будет преодолеть ТП, двигаясь по автодороге. В местах частой смены уровня высот происходит снижение скорости ТП.
Важным параметром, влияющим на безопасность дорожного движения, является расстояние
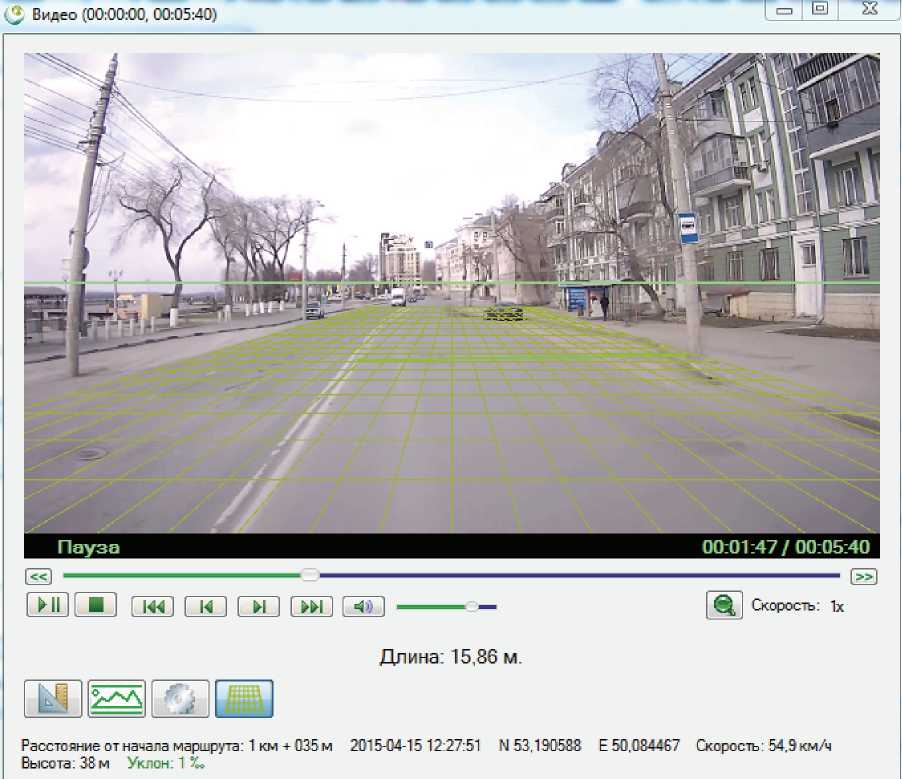
Рис. 3. Определение параметров улично-дорожной сети
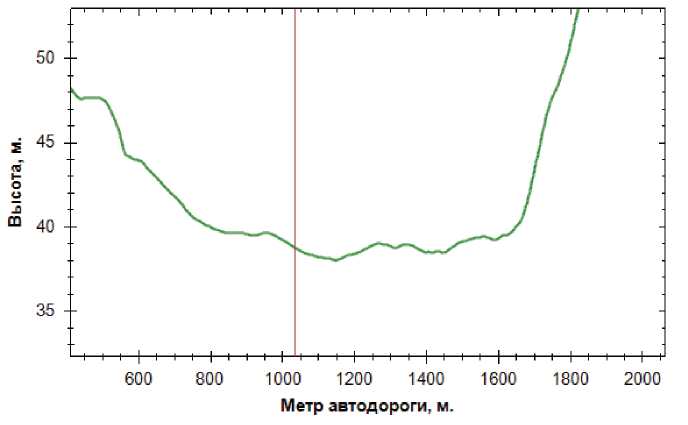
Рис. 4. Определение высотных характеристик проектной линии автодороги
видимости (рис. 5). График изменения расстояния видимости строится исходя из имеющихся данных о перепаде высот (рис. 4) и радиусах кривых автодороги в плане. Используемая в алгоритмах высота расположения глаз водителя – 1,2 м от проектной линии автодороги.
Анализ параметров управляющих объектов ур- банизированной территории необходимо выполнить для построения динамической модели ТП, которая позволит комплексно учитывать влияние ТСОДД, других объектов ТрИ, их управляющих воздействий на ТП, моделировать дорожное движение на микро-(транспортное средство – динамический объект) и макроуровнях с учетом управляющих воздействий.
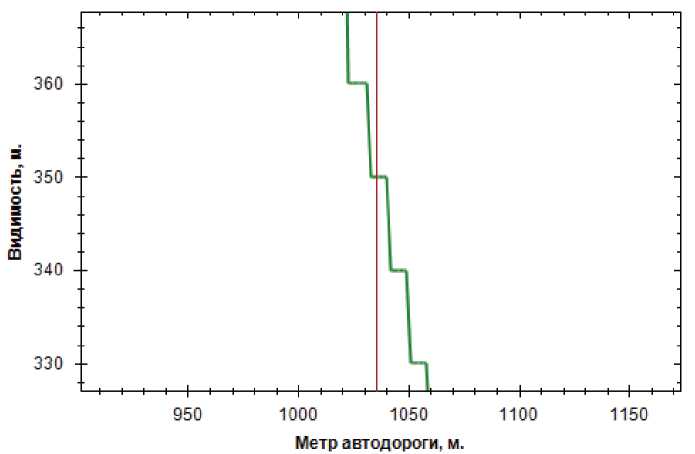
Рис. 5. Определение мест с ограниченной видимостью
Список литературы Параметризация управляющих объектов урбанизированной территории
- Головнин, О.К. Анализ транспортных моделей имитационных платформ/О.К. Головнин//IT & Транспорт: сборник научных статей. -Самара: Интелтранс, 2014. -Т. 1. -С. 19-28.
- Зырянов, В.В. Моделирование транспортных потоков на городской сети/В.В. Зырянов, В.Г. Кочерга//Организация и безопасность дорожного движения в крупных городах. -СПб.: СПб. ГАСУ, 2006. -С. 193-197.
- Катруца, А.М. Проблема мультиколлинеарности при выборе признаков в регрессионных задачах/А.М. Катруца, В.В. Стрижов//Информационные технологии. -2015. -№ 1. -С. 8-18.
- Курбанов, В.Г. Алгоритм поиска оптимальных управляющих воздействий на динамические объекты/В.Г. Курбанов//Труды СПИИРАН. -2005. -№ 2. -С. 317-327.
- Маслов, Д.А. Параметризация расчетных моделей/Д.А. Маслов, М.В. Пашковский//Вестник гражданских инженеров. -2006. -№ 1. -С. 26-34.
- Михеева, Т.И. Идентификация зависимостей и пространственно-распределенных данных с использованием нейросетевых технологий/Т.И. Михеева, О.Н. Сапрыкин//Вестник Самарского государственного технического университета. Серия: Технические науки. -2007. -№ 1 (19). -С. 40-47.
- Стрижов, В.В. Методы выбора регрессионных моделей/В.В. Стрижов, Е.А. Крымова. -М.: ВЦ РАН. -2010. -60 с.
- Федосеев, А.А. Технология Data Mining в задачах прогнозирования развития транспортной инфраструктуры /А.А. Федосеев, С.В. Михеев, О.К. Головнин//Современные проблемы науки и образования. -2013. -№ 1. -Режим доступа: http://www.science-education.ru/107-8153.
- Швецов, В.И. Математическое моделирование транспортных потоков/В.И. Швецов//Автоматика и телемеханика. -2003. -№ 11. -С. 3-46.
- Intelligent Transport Systems: Methods, Algorithms, Realization/T.I. Mikheeva . -Saarbrucken: LAP Lambert Academic Publishing, 2014. -164 p.
