Передаточные отношения эксцентрикового подшипника качения при ведущем наружном кольце

Автор: Меснянкин М.В., Кудрявцев И.В., Колотов А.В., Митяев А.Е., Лысянников А.В., Трошин С.И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.17, 2024 года.
Бесплатный доступ
Создание и использование перспективных конструкций эксцентриковых подшипников качения (ЭПК) во многом затруднено недостаточным развитием методов их расчета и анализа особенностей работы. В данной работе рассматривается решение задачи определения передаточных отношений эксцентрикового подшипника качения (ЭПК) для случая преобразования вращательного движения ведущего наружного кольца в поступательное перемещение выходного внутреннего кольца, соединённого с исполнительным органом технологической машины. Определены формулы для расчёта передаточных отношений от входного наружного кольца к его ведомым звеньям: телам качения, сепаратору и внутреннему кольцу. Получены зависимости, определяющие закономерности линейного перемещения выходного кольца подшипника от геометрических параметров ЭПК и угла поворота ведущего кольца. Разработанные методы кинематического анализа позволяют проектировать эксцентриковые подшипники качения с требуемыми кинематическими параметрами, обосновывать область их применения как в виде отдельных узлов, так и в составе механических приводов для реализации заданных законов движения.
Эксцентриковый подшипник качения, эксцентриситет, тела качения, дорожка качения, сепаратор, привод, передаточное отношение, скорость, перемещение
Короткий адрес: https://sciup.org/146282904
IDR: 146282904 | УДК: 621.838.2
Gear ratios of the eccentric roller bearing with a leading outer ring
The creation and use of promising designs of eccentric rolling bearings (ERВ) is largely hampered by the insufficient development of methods for their calculation and analysis of work features. This paper examines the solution to the problem of determining the gear ratios of an eccentric rolling bearing for the case of converting the rotational motion of the driving outer ring into the translational movement of the output inner ring connected to the executive body of the technological machine. Formulas are defined for calculating the gear ratios from the input outer ring to its driven links: rolling elements, separator and inner ring. Dependencies determining the regularities of linear displacement of the bearing output ring on the geometric parameters of the ERВ and the angle of rotation of the drive ring are obtained. The developed methods of kinematic analysis make it possible to design eccentric rolling bearings with the required kinematic parameters, to justify the scope of their application both in the form of individual units and as part of mechanical drives to implement specified laws of motion.
Текст научной статьи Передаточные отношения эксцентрикового подшипника качения при ведущем наружном кольце
Цитирование: Меснянкин М. В. Передаточные отношения эксцентрикового подшипника качения при ведущем наружном кольце / М. В. Меснянкин, И. В. Кудрявцев, А. В. Колотов, А. Е. Митяев, А. В. Лысянников, С. И. Трошин // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(5). С. 642–654. EDN: GXTHJF заданного сложного закона движения выходного звена, что повышает их функциональные возможности.
Ведущим (входным) звеном эксцентрикового подшипника может являться одно из колец, внутреннее или наружное, которое задаёт движение его ведомым звеньям (телам качения, сепаратору) и располагается на неподвижной оси вращения. Выходным звеном принимается ведомое кольцо, на котором получают требуемое движение исполнительного органа технологической машины, а геометрическая ось этого кольца будет подвижна. При ведущем внутреннем кольце наружное кольцо совершает плоскопараллельное движение с определёнными кинематическими параметрами, а при ведущем наружном – внутреннее совершает движение уже с другими. Эти кинематические параметры и требуемое перемещение выходного звена ЭПК непосредственно зависят от характеристик его передаточных функций, определение которых является основной задачей предлагаемого кинематического исследования.
В связи с особенностями геометрического строения и нелинейностью движения звеньев эксцентриковых подшипников и механизмов качения (ЭПК и ЭМК) вопрос создания методов их кинематического расчёта и определения передаточных отношений усложнён и поэтому недостаточно подробно изучен. Большинство научных исследований посвящены определению кинематических параметров ЭПК и ЭМК с замкнутой системой тел качения диаметров как равной, так и переменной величины [9–17] лишь для случая преобразования вращательного движения входного кольца во вращательное выходного. Ранее авторами статьи в работе [18] определены зависимости передаточных отношений эксцентрикового механизма качения для случая преобразования вращательного движения ведущего внутреннего кольца в поступательное перемещение выходного наружного кольца. Однако в данной работе не было проведено аналитическое исследование полученных равенств и не показаны функции, определяющие закон движения выходного звена. Также полученные зависимости [18] не позволяют проводить кинематический анализ ЭПК и ЭМК при ведущем наружном кольце. Следовательно, для дальнейшего развития исследования кинематики эксцентриковых подшипников и механизмов качения становится актуальным решение задачи установления формул по определению передаточных функций для случая преобразования вращательного движения звеньев в поступательное при ведущем наружном кольце.
Цель
Целью работы является получение функциональных зависимостей по расчёту передаточных отношений от ведущего наружного кольца эксцентрикового подшипника качения, совершающего окружное вращательное движение, к его ведомым звеньям, а также выходному внутреннему кольцу, имеющему возможность поступательного перемещения. Результаты исследования позволят более подробно описать математическую модель кинематики ЭПК, выявить особенности его работы и способствовать созданию новых конструкций технологических цикловых машин, разработанных на его основе.
Методы
В проводимом исследовании используются существующие общепринятые положения прикладной механики и теории механизмов и машин, аналитические и графоаналитические – 644 – методы решения задач кинематического анализа, что в итоге позволило получить результаты в весьма простой аналитической форме, пригодной для использования инженерами при проектировании ЭПК и механических приводов на их основе.
1. Кинематика движения звеньев ЭПК
При расчётах кинематических параметров эксцентрикового подшипника используются обобщённые координаты ведомых звеньев, зависящие от обобщенных координат ведущих колец как функции величин передаточного отношения. Рассмотрим решение задачи по установлению зависимостей, определяющих передаточные отношения и функции перемещения звеньев ЭПК для случая преобразования окружного вращательного движения входного наружного кольца в поступательное движение выходного внутреннего кольца, соединённого с исполнительным звеном рабочего органа механического привода цикловой машины.
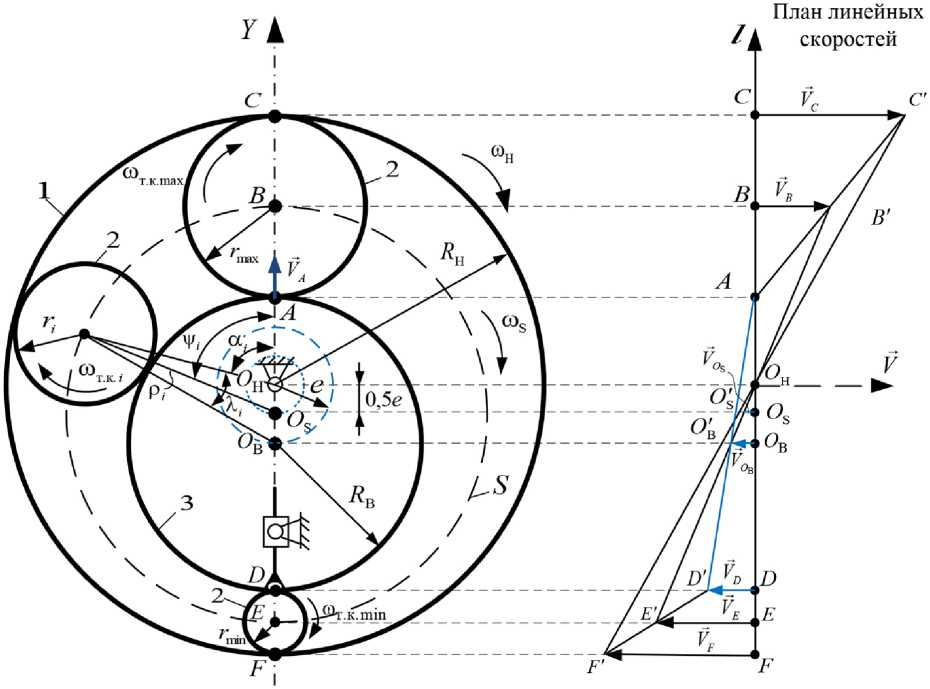
Составим схему движения звеньев ЭПК (рис. 1а) и примем следующие обозначения: е – эксцентриситет; R B, R H – радиусы дорожек качения внутреннего и наружного колец; r max, r min, ri – радиусы максимального, минимального и i -го тела качения; О Н , О В и О S – точки, принадлежащие геометрическим осям наружного кольца, внутреннего кольца и сепаратора.
В рассматриваемом случае движения (рис. 1а) ведущее наружное кольцо (звено 1) установлено на вращающемся валу, геометрическая ось которого (точка О Н) неподвижна. Тела качения (звено 2) при их обкатывании без скольжения по дорожке качения наружного кольца будут взаимодействовать без скольжения с дорожкой качения ведомого внутреннего кольца (звено 3), которое является выходным и имеет ограничение от перемещений в окружном направлении относительно своего центра вращения точки О В . При этом внутреннее кольцо будет совершать колебательное движение в результате переносного движения его центра вращения по окружности радиусом, равным величине эксцентриситета относительно неподвижной точки О Н (рис. 1а). Для наглядной оценки работы кинематики ЭПК выполним построение плана линейных скоростей (рис. 1б) для характерных точек подшипника, в качестве которых примем точки контакта тел качения с дорожками качения внутреннего и наружного колец, а также геометрические центры звеньев ЭПК (рис. 1).
Анализ схемы (рис. 1а) показывает, что точка А дорожки качения внутреннего кольца имеет возможность линейно перемещаться по оси Y вследствие переносного движения его центра вращения. Выходное кольцо ЭПК соединено с исполнительным звеном рабочего органа технологической машины в точке А , которая одновременно принадлежит и звену 2, т.е. телу качения максимального радиуса, контактирующему с наружным кольцом в точке С , скорость которой равна:
^C ^^тих ^т.к.шах, (1)
здесь ω т.к.max – угловая скорость тела качения максимального радиуса.
Относительная линейная скорость точки С (рис. 1) дорожки качения ведущего наружного кольца определяется:
Vc =VF =Rn- юн, (2)
где ωH – угловая скорость наружного кольца.
б
а
Рис. 1. Схема движения звеньев ЭПК (а) и план линейных скоростей (б) при ведущем наружном кольце
Fig. 1. Diagram of the movement of the EPC links (a) and the plan of linear velocities (б) with a leading outer ring
Сравнивая формулы (1) и (2), получаем выражение для определения угловой скорости максимального тела качения относительно своего центра вращения:
®т.к.тах — ®Н ’ _
^'тах
.
2. Передаточные отношения ЭПК
Особенностью строения ЭПК [7] является смещение геометрического центра тела качения на угол клина λ i относительно точек О Н и О В (рис. 1а). Тогда угловая скорость ω т.к. i i -го тела качения равна:
Анализируя (3), передаточное отношение ^12 от ведущего наружного кольца к телу качения определяется отношением угловых скоростей этих звеньев. В результате получаем:
.
Относительную скорость точки B тела качения максимального радиуса выразим, рассмотрев прямоугольный треугольник Δ CAC ʹ (рис. 1б):
VB=O,5-VC =0,5-R„ -co . (5)
Линейная скорость точки B , принадлежащая сепаратору, относительно неподвижного центра вращения ведущего наружного кольца, определяется по формуле:
VB =®s-(pi-0^'c4l'/))
здесь ω S – угловая скорость сепаратора; ψ i – угол положения и ρ i – расстояние от центра i -го тела качения до геометрического центра сепаратора (рис. 1а).
В работах [7, 19, 20] определены зависимости и алгоритмы по расчёту геометрических параметров эксцентриковых механизмов с замкнутой системой тел качения, согласно которым угол ψ i и расстояние ρ i равны

Угловая скорость сепаратора с учётом преобразований (5) и (6) равна:
Тогда передаточное отношение ^i s) от ведущего наружного кольца к сепаратору при невра-щающемся внутреннем кольце определяется по формуле:
С учётом (8) выражение (10) после преобразований примет вид:
Скорость центра вращения сепаратора (точка О S ), совершающего переносное движение по окружности радиусом 0,5 е относительно неподвижной точки О Н (рис. 1а), с учётом (9) и (11), равна:

Из анализа плана скоростей (рис. 1б) следует, что переносная скорость VOB движения центра вращения внутреннего кольца зависит от линейной скорости центра вращения сепаратора и его угловой скорости относительно центра вращения ведущего наружного кольца:

Вследствие переносного движения центра вращения внутреннего кольца точка А будет перемещаться по оси Y (рис. 1а). Смещение точки А зависит от углового перемещения ведущего – 647 – наружного кольца и сепаратора с обобщёнными координатами αi и ψi соответственно. Следовательно, при повороте сепаратора на определённый угол ψi точка А сместится по оси Y на некоторую величину, определяемую по формуле:

С учётом (7) величина линейного перемещения точки А при повороте наружного кольца на обобщённую координату α i определится по следующей зависимости:

Скорость точки А получим, дифференцируя по времени (14)

Линейную скорость этой точки в зависимости от угловой скорости ведущего наружного кольца получаем, выполнив преобразование (16) с учётом (7) и (9)
где
В = (о, 5с + (Лн - /;)■ cos (а,))/р,
Анализ формулы (17) показывает, что передаточное отношение от ведущего наружного кольца, совершающего вращательное движение, к выходному внутреннему кольцу, совершающему поступательное движение (рис. 1) и соединённому с исполнительным звеном рабочего органа механического привода цикловой машины, равно:
Полученные аналитические выражения позволяют проводить кинематический анализ ЭПК и определять оптимальное сочетание значений его геометрических параметров, которые обеспечат заданное передаточное отношение и закон движения выходного звена для рассматриваемого случая движения звеньев (рис. 1).
3. Результаты расчётов
Выполним кинематические расчеты ЭПК, позволяющие качественно оценить получаемые параметры его движения. Используя выражение (15), построим в общем виде диаграммы (рис. 2) аналогов перемещения SA = f 1 (α), скорости dSA / d (α) = f 2 (α) и ускорения d 2 SA / d (α)2 = f 3 (α) точки А выходного внутреннего кольца как функции обобщенной угловой координаты (α) ведущего наружного кольца за один цикл работы ЭПК, который соответствует изменению этой координаты на угол от 0 до 2π.
По найденным формулам (4), (11) и (18) были посчитаны соответствующие передаточные отношения и построены функции их изменений (рис. 3 и 4) для схемы исполнения ЭПК – 648 –
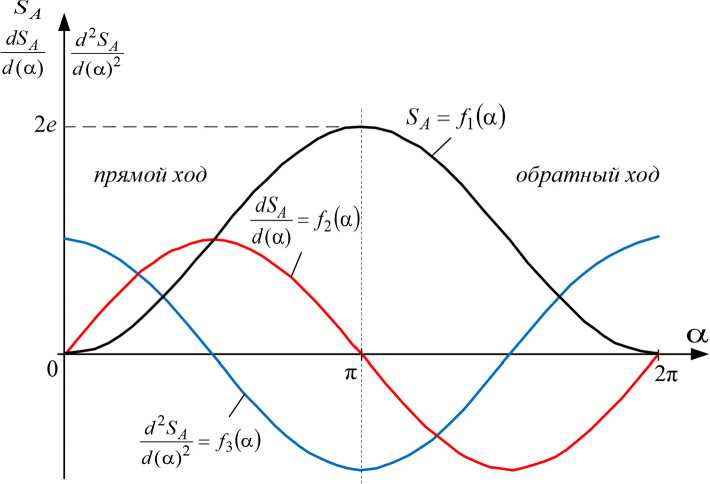
Рис. 2. Закон линейного перемещения выходного внутреннего кольца
Fig. 2. The law of linear displacement of the output inner ring
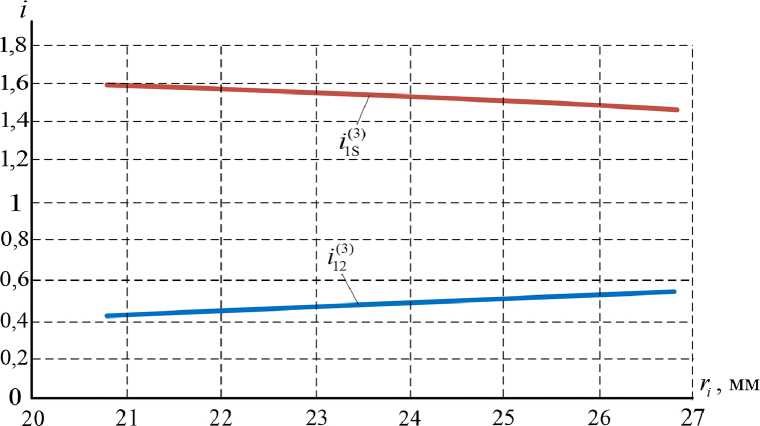
Рис. 3. Функции передаточного отношения ЭПК от ведущего наружного кольца к телу качения ^12 и сепаратору Z1S
Fig. 3. Functions of the ERB gear ratio from the leading outer ring to the rolling body 7'12 and separator
(рис. 1а) с расположенными на оси симметрии двух тел качения максимального и минимального радиусов в диаметрально противоположных направлениях [7, 8] и следующими значениями размеров основных геометрических параметров: e = 6 мм, R B = 52,4 мм, R H = 100 мм, r min = 20,8 мм, r max = 26,8 мм.
Кинематические диаграммы (рис. 2–4), анализ которых приведен далее, позволяют выявить основные аспекты работы эксцентрикового подшипника качения, а также наглядно оценить особенности его кинематики и ее влияние на движение выходного звена.
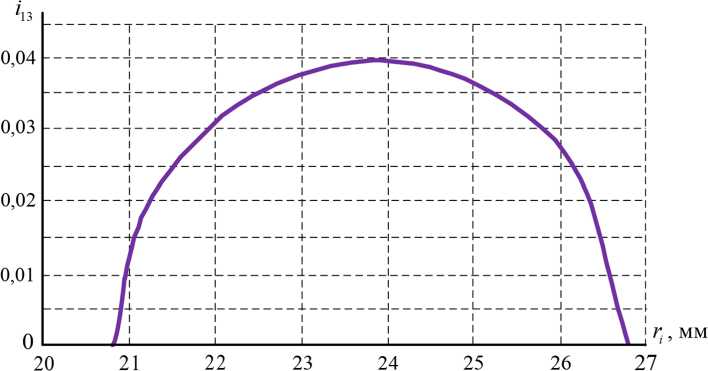
Рис. 4. Функция передаточного отношения ЭПК от ведущего наружного кольца к выходному внутреннему кольцу i 13
Fig. 4. The function of the EPC transfer ratio from the leading outer ring to the output inner ring i 13
4. Обсуждение результатов исследования
Авторами статьи в данной работе получены уникальные формулы, показанные в простом аналитическом виде, позволяющие рассчитывать передаточные отношения эксцентриковых подшипников и механизмов качения при ведущем наружном кольце, а также определяющие закон его линейного перемещения. Формулы представлены как функции основных геометрических параметров и обобщённых координат звеньев ЭПК, что позволяет инженерам при проектировании механических приводов под заданные величины передаточных отношений варьировать или подбирать необходимые оптимальные сочетания значений размеров этих звеньев.
Проведём анализ полученных зависимостей и графических результатов их решения.
Если наложено конструкционное ограничение окружному движению выходного внутреннего кольца только лишь вертикальной прямой осью, соединённого с исполнительным органом технологической машины в точке А , то будем иметь простое линейное перемещение выходного кольца (рис. 1). При равенстве нулю величины эксцентриситета ( e = 0) ЭПК преобразуется в схему, подобную схеме радиального подшипника качения (РПК), геометрические оси внутреннего и наружного колец которого совпадают, а сами кольца могут совершать только вращательное движение, не имея возможности линейного перемещения. Следовательно, для РПК, или ЭПК при e = 0, передаточное отношение i 13 должно равняться нулю. С целью проверки этого утверждения подставим в равенство (18) условие e = 0, в результате получаем Z13 % Г) 0 ,
■ / 2 A что подтверждает корректность выводов и достоверность полученных зависимостей.
При построении кинематической схемы ЭПК необходимо предварительно иметь законы движения его выходного кольца, получить которые для рассмотренного случая движения звеньев подшипника (рис. 1) позволяют функции (14)–(17). Их анализ показывает, что закон движения точки А выходного внутреннего кольца зависит от обобщённых координат (αi и ψi), а также геометрических параметров подшипника, в том числе и от величины эксцентриситета. При рассмотрении кинематических диаграмм (рис. 2) видно, что величина линейного перемещения (хода) SA точки выходного кольца равна удвоенному значению эксцентриситета, т.е. 2е, – 650 – а её путь перемещения делится на прямой ход и обратный, которые соответствуют изменению угловой обобщённой координаты ведущего кольца (α) на угол от 0 до π. Так как ЭПК имеет ось симметрии [7, 8], то законы движения точки А при прямом и обратном ходе получились симметричными (рис. 2).
Анализ функций передаточных отношений (рис. 3) от ведущего наружного кольца к телу качения /р и сепаратору ^1S показывает, что они имеют линейный закон изменения, а их величины от минимального тела качения к максимальному изменяются незначительно. Тела качения эксцентрикового подшипника обладают меньшими значениями радиусов, чем радиус дорожки качения ведущего наружного кольца. Следовательно, тела перекатываются по этой дорожке с большей угловой скоростью, чем вращается само кольцо, а значения передаточного отношения Zp получаются меньше единицы (рис. 3). Значения передаточного отношения ^1S получаются больше единицы (рис. 3), тем самым сепаратор, совершая окружное движение, вращается медленнее, чем ведущее наружное кольцо, выигрывая при этом в силовом факторе.
Функция передаточного отношения ЭПК от ведущего наружного кольца к выходному внутреннему кольцу i 13 (рис. 4) изменяется плавно по схожему с синусоидальным закону. Анализ функции показывает, что значения передаточного отношения i 13 на минимальном и максимальном телах качения, расположенных на оси симметрии, равны нулю. Это позволяет при редукции скорости выходному кольцу и соединённому с ним рабочему органу цикловой машины выполнить останов и в следующий момент времени совершать линейное перемещение в противоположную сторону, т.е. делать прямой и обратный ход (рис. 2). Максимальные значения передаточного отношения i 13 получаются на промежуточных телах качения ЭПК, расположенных на углу 90 градусов от оси симметрии. Следовательно, при повороте ведущего кольца на данный угол рабочий орган развивает максимальную скорость, а ускорение при этом будет равняться нулю, что подтверждается законами линейного перемещения выходного внутреннего кольца, показанными на рис. 2.
Для рассматриваемого в работе типоразмера эксцентрикового подшипника качения величина хода получилась равной S = 12 мм, а значения передаточных отношений от ведущего наружного кольца получились в следующих диапазонах: к телу качения Zp = (0,536 ÷ 0,416) к сепаратору Z^ = (1,464 ÷ 1,584); к внутреннему кольцу i 13 = (0 ÷ 0,395). Необходимо отметить, что использование других схем исполнения ЭПК [7, 8] и изменение величин размеров его основных геометрических параметров будут непосредственно влиять на значения указанных диапазонов передаточных отношений подшипника.
При проектировании, на базе рассматриваемого в работе ЭПК (рис. 1), приводов машин с поступательным движением их рабочего органа инженеру необходимо учитывать, что максимальный предел линейного перемещения (хода) конструктивно ограничен и не превышает удвоенного значения эксцентриситета подшипника, т. е S max = 2 e .
Эксцентриковый подшипник выполняет функции опоры качения, эксцентрика и редуктора одновременно, что существенно упрощает структуру механического привода технологических цикловых машин, созданных на его основе. В отличие от зубчатых механизмов предлагаемый ЭПК обеспечивает закон движения его выходного звена (рис. 1, рис. 2), с изменениями значений передаточного отношения за один цикл работы (рис. 3, рис. 4) при гораздо более простой конструкции. Рычажные кривошипно-ползунные механизмы позволяют реализовать всего один вид – 651 – передаточной функции, наподобие показанному на рис. 4, и требуют введения дополнительных звеньев и кинематических пар. Достоинством ЭПК, по сравнению с рычажными механизмами, является отсутствие шатуна и возможность редукции с несколькими видами передаточных отношений (рис. 3 и 4), что позволяет сделать выходным звеном не только внутреннее или наружное кольцо, но и сепаратор, который будет выступать в качестве водилы. Эти достоинства предлагаемого эксцентрикового подшипника значительно расширяют функциональные возможности при его использовании в качестве рабочего органа механического привода.
Авторами статьи предполагается провести дальнейший анализ полученных кинематических зависимостей, выявить диапазоны передаточных отношений для различных типоразмеров и схем исполнения ЭПК, а также влияния изменения значений размеров основных геометрических параметров подшипника на величины и вид передаточных функций.
Заключение
В работе получены основные зависимости, позволяющие рассчитать значения передаточных отношений от ведущего наружного кольца ЭПК к его ведомым звеньям: к телам качения (4), к сепаратору (11), а также к выходному кольцу (18), для случая преобразования вращательного движения входного наружного кольца ЭПК в поступательное перемещение исполнительного органа технологической машины, соединённого с выходным внутренним кольцом подшипника. Полученные функции (14)–(17) определяют закономерности линейного перемещения выходного внутреннего кольца для рассмотренного случая движения звеньев подшипника. Выполненные кинематические расчеты и полученные численные результаты позволили определить типовые кинематические параметры эксцентрикового подшипника качения и качественно оценить особенности его работы.
Результаты работы позволяют обоснованно выполнять кинематические исследования ЭПК при проектировании механических приводов технологических цикловых машин, созданных на его базе, а также задавать необходимые сочетания геометрических размеров звеньев для обеспечения заданного закона движения выходного звена, что способствует расширению области применения и функциональному назначению эксцентрикового подшипника качения.
Список литературы Передаточные отношения эксцентрикового подшипника качения при ведущем наружном кольце
- Сильченко П. Н., Синенко Е. Г. Подшипник качения. А. с. 174088 СССР, 1992, бюл. № 41, 3. [Silcyenko P. N., Sinenko E. G. Rolling bearing. Copyright certificate 174088 USSR, 1992, the bulletin № 41, 3. (in Rus.)].
- Волков Г. Ю., Курасов Д. А. Эксцентриковый подшипник качения. Патент 2315212 РФ, 2008, бюл. № 2, 9. [Volkov G. Y., Kurasov D. A. Eccentric rolling bearing. The patent 2315212 RF, 2008, the bulletin № 2, 9. (in Rus.)].
- Willi Barske; Ulrich Max. Friction gearing. The patent 3380312 USA. № 489, 217; declared 22.09.64; published 30.04.68, 13.
- Taylor E. W. Rolling contact devices. The patent 969005 USA. № 424, 553; declared 13.12.1973; published 13.07.1976, 9.
- Leeson P. G. Mecanusme de changement de Vitesse. The patent 748250 Belgium. declared 31.03.70; published 31.08.70. 20.
- Макарова Н. В. Механические передачи с промежуточными телами качения, Современные техника и технологии: сб. научн. тр. XVIII Междунар. науч.-практ. конф. Томск: ТПУ, 2013, 3(1), 217–218. [Makarova N. V. Mechanical gears with intermediate rolling elements. Modern equipment and technologies: collection of scientific papers XVIII International scientific and practical conference, Tomsk, TPU, 2013, 3(1), 217–218 (in Rus.)].
- Меснянкин М. В., Митяев А. Е., Мерко М. А. Геометрические параметры исполнительных устройств приводов технологического оборудования на базе механизмов с замкнутой системой тел качения: монография. Красноярск: Сиб. федер. ун-т, 2013, 115. [Mesnyankin M. V., Mityaev A. E., Merko M. A. Geometric parameters of actuators of technological equipment drives based on mechanisms with a closed system of rolling elements, monograph. Krasnoyarsk, Sib. Fed. Univ., 2013, 115. (in Rus.)].
- Меснянкин М. В., Мерко М. А., Колотов А. В., Митяев А. Е. Условия симметрии механизмов с замкнутой системой тел качения. Вестник Таджикского технического университета, 2013, (3), 29–34. [Mesnyankin M. V., Merko M. A., Kolotov A. V., Mityaev A. E. Symmetry conditions of mechanisms with a closed system of rolling elements. Bulletin of the Tajik Technical University, 2013, (3), 29–34 (in Rus.)].
- Меснянкин М. В., Мерко М. А., Колотов А. В. Передаточные отношения механизмов с ЗСТК с диаметрами равной величины и зазором при ведущем внутреннем кольце и вводе поправки по дорожке качения наружного кольца. Молодой ученый, Чита, 2013, 6(53), 71–75. [Mesnyankin M. V., Merko M. A., Kolotov A. V. Gear ratios of mechanisms with closed system of rolling elements with diameters of equal magnitude and a gap with a leading inner ring and an input correction along the raceway of the outer ring. A young scientist, Chita, 2013, 6(53), 71–75 (in Rus.)].
- Меснянкин М. В., Колотов А. В., Митяев А. Е., Мерко М. А., Кайзер Ю. Ф., Лысянников А. В. и др. Передаточные отношения планетарных механизмов с ЗСТК с диаметрами равной величины при ведущем наружном кольце и вводе поправки по радиусу дорожки качения этого же звена. Современные проблемы науки и образования. 2015, № 1. [Электронный ресурс] – Режим доступа: http: www.science-education.ru/121–17100. [Mesnyankin M. V., Kolotov A. V., Mityaev A. E., Merko M. A., Kaiser U. F., Lissyannikov A. V. and others. Gear ratios of planetary mechanisms with closed system of rolling elements with diameters of equal magnitude with the driving outer ring and the introduction of a correction along the radius of the rolling path of the same link. Modern problems of science and education. 2015, № 1. [Electronic resourse] – Access: http: www.science-education.ru/121–17100. (in Rus.)].
- Шеремет Д. С., Сержантова М. П. Анализ влияния зазора на передаточные отношения механизмов с ЗСТК с диаметрами равной величины при ведущем внутреннем кольце. Проспект Свободный‑2015: материалы науч. конф., посвященной 70-летию Великой Победы. Красноярск, Сиб. федер. ун-т, 2015, 55–59. [Sheremet D. S., Sergantova M. P. Analysis of the effect of the gap on the gear ratios of mechanisms with closed system of rolling elements with diameters of equal magnitude with a leading inner ring. Svobodny Avenue‑2015, materials of the scientific conference dedicated to the 70th anniversary of the Great Victory. Krasnoyarsk, Sib. Fed. Univ., 2015, 55–59 (in Rus.)].
- Меснянкин М. В., Мерко М. А., Колотов А. В. и др. Анализ влияния зазора на передаточные отношения механизмов с ЗСТК при ведущем наружном кольце. Известия Тульского государственного университета. Технические науки, 2015/5–2, 170–177. [Mesnyankin M. V., Merko M. A., Kolotov A. V. and others. Analysis of the effect of the gap on the gear ratios of mechanisms with closed system of rolling elements with a leading outer ring. Proceedings of Tula State University. Technical sciences. 2015/5–2, 170–177 (in Rus.)].
- Шукелис Н. О. Метод точечных отображений звеньев в кинематике пространственных механизмов. Труды Латв. С.-х. акад. Рига, 1971, Вып. 32, 18–30. [Shukelis N. O. The method of point mapping of links in the kinematics of spatial mechanisms. Proceedings of the Latvian Agricultural Academy. Riga, 1971, issue of the magazine 32, 18–30 (in Rus.)].
- Федоров Н. Н., Балакин П. Д. Кинематика и синтез фрикционного планетарного редуктора. Механика процессов и машин. Омск, 1994, 157–167. [Fedorov N. N., Balakin P. D. Kinematics and synthesis of friction planetary gearbox. Mechanics of processes and machines, Omsk, 1994, 157–167 (in Rus.)].
- Молочко В. И., Данильчик С. С. Кинематика эксцентриковых фрикционных механизмов с качающимся опорным звеном. Проблемы инженерно-педагогического образования в Республике Беларусь: материалы международной научно-практической конференции, Минск, БНТУ, 2004, 276–281. [Molochko V. I., Danilchik S. S. Kinematics of eccentric friction mechanisms with a swinging support link. Problems of engineering and pedagogical education in the Republic of Belarus: materials of the international scientific and practical conference. Minsk, BNTU, 2004, 276–281 (in Rus.)].
- Федченко Е. М. Методы геометро-кинематического анализа и синтеза пространственных фрикционных передач с замкнутой системой тел качения. Дис. … канд. техн. наук. Курган, 2004. 254 [Fedchenko E. M. Methods of geometric-kinematic analysis and synthesis of spatial friction gears with a closed system of rolling elements. Thesis … cand. of tech. sci. Kurgan, 2004, 254 (in Rus.)].
- Курасов Д. А. Разработка и исследование зубчатых эксцентриковых подшипников и механизмов, построенных на их базе. Дис. … канд. техн. наук. Курган, 2008, 134 [Kurasov E. M. Development and research of toothed eccentric bearings and mechanisms based on them. Thesis … cand. of tech. sci. Kurgan, 2008, 134 (in Rus.)].
- Меснянкин М. В., Мерко М. А., Колотов А. В. и др. Передаточные отношения эксцентрикового механизма качения для случая преобразования вращательного движения в поступательное перемещение. Фундаментальные исследования. 2017, 5, 56–60; URL: https://fundamental-research.ru/ru/article/view?id=41507. [Mesnyankin M. V., Merko M. A., Kolotov A. V. and others. The gear ratios of the eccentric rolling mechanism for the case of converting rotational motion into translational motion. Basic research. 2017, 5, 56–60. [Electronic resourse] – Access: https://fundamental-research.ru/ru/article/view?id=41507 (in Rus.)].
- Меснянкин М. В., Колотов А. В., Мерко М. А. и др. Особенности расчёта номинальных значений геометрических параметров ЭМК. Проблемы механики современных машин: Материалы V‑ой международной конф. Улан-Удэ, Изд-во ВСГУТУ. 2012, т. 1, 89–92. [Mesnyankin M. V., Kolotov A. V., Merko M. A. and others. Features of calculation of nominal values of geometric parameters of ERM. Problems of mechanics of modern machines: Materials of the V‑th international conference. Ulan-Ude, publishing house VSSUTU. 2012. volume 1, 89–92 (in Rus.)].
- Меснянкин М. В., Колотов А. В., Митяев А. Е и др. Анализ взаимозависимостей геометрических параметров ЭМК. Вестник КрасГАУ. Красноярск, 2012, № 11, 180–184. [Mesnyankin M. V., Kolotov A. V., Merko M. A. and others. Analysis of the interdependencies of the geometric parameters of the ERM. Vestnik KrasSAU. Krasnoyarsk, 2012, № 11, 180–184 (in Rus.)].
