Перспектива применения мультиагентного подхода в управлении орбитальной группировкой оптико-электронного наблюдения

Автор: Хартов Виктор Владимирович, Чернявский Александр Григорьевич, Скобелев Птр Олегович, Мятов Геннадий Николаевич, Поливанов Владимир Александрович, Журавель Юлия Николаевна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (43), 2023 года.
Бесплатный доступ
В области создания и использования космических аппаратов (КА) сформировалось направление по созданию орбитальных группировок, базирующихся на КА малого веса и размеров. Новый класс «умных группировок» связывается с автономизацией КА за счёт автоматизации как процессов принятия решений на борту, так и процессов согласованного взаимодействия между КА в решении поставленной целевой задачи, что позволяет создавать самоорганизующуюся группировку - «рой» КА. Такой подход представляется перспективным для построения группировок маломассогабаритных КА, что позволяет дополнить список существующих способов управления средствами дистанционного зондирования Земли, сделав акцент на повышении целевых характеристик группировки, в частности на оперативности, адаптивности и эффективности решения целевой задачи наблюдения района интересов.
Малые космические аппараты, сверхразрешение, управление орбитальной группировкой, мультиагентные технологии, планирование, адаптивность
Короткий адрес: https://sciup.org/143181057
IDR: 143181057 | УДК: 629.783+004.896
The perspective of applying a multi-agent approach to control orbital opto-electronic surveillance constellation
A concept of development of small-size and light-weight spacecraft-based orbital constellations has been formed in the area of spacecraft (SC) development and use. A new class of «smart constellations» is associated with the autonomy of the SC being developed through automating both onboard decision-making and SC coordinated interaction processes in solving the target task, which enables to develop self-organizing SC constellations, called a SC swarm. This approach seems especially promising for construction of light-weight SC constellations, which makes it possible to update the list of existing methods of controlling Earth remote sensing instruments, emphasizing the mission performance upgrade of the constellation, specifically operability, adaptability and efficiency of solving the target task of observing the area of interest.
Текст научной статьи Перспектива применения мультиагентного подхода в управлении орбитальной группировкой оптико-электронного наблюдения
Съёмка земной поверхности из космоса в оптическом диапазоне на сегодняшний день является основным способом получения изображений. Развитие средств оптико-электронного наблюдения в последние годы идёт нарастающими темпами. При этом общей тенденцией является улучшение пространственного разрешения космических снимков. Именно с этим связано стремление производителей повысить разрешающую способность съёмочной аппаратуры за счёт изменения её конструктивных параметров и габаритов, а также применение практических подходов к изменению схем наблюдения, высоты орбиты, габаритов спутниковых платформ [1].
Наиболее очевидным способом улучшения пространственного разрешения является уменьшение размера фото-чувствительных элементов приёмника.
Однако такой вариант приводит также и к уменьшению соотношения сигнал/шум из-за падения уровня освещённости на пиксель, что ухудшает качество выходного изображения. Увеличение апертуры оптической системы ограничено технологическими возможностями и приводит к увеличению массы, габаритов и стоимости системы в целом. С другой стороны, решить задачу улучшения пространственного разрешения и точности координатной привязки космических снимков позволяют современные технологии наземной обработки результатов многократной космической съёмки одного и того же района интереса [2].
Существующие отечественные средства дистанционного зондирования Земли (ДЗЗ) высокого разрешения обеспечивают периодичность наблюдения заданных объектов (районов) один раз в несколько суток при оперативности решения целевой задачи до нескольких недель и месяцев. Вместе с тем, изменение спектра задач, решаемых средствами оптико-электронного наблюдения, связанное, прежде всего, с появлением новых форм и способов вооружённой борьбы, в т. ч. с терроризмом, диктуют необходимость существенного улучшения такого показателя, как оперативность решения целевой задачи наблюдения.
направления повышения целевых характеристик орбитальной группировки оптико-электронного наблюдения
Одним из вариантов улучшения периодичности наблюдения является увеличение высоты орбиты и, соответственно, полос обзора и захвата. Однако такой подход связан либо с ухудшением линейного разрешения оптико-электронной аппаратуры космического аппарата (КА), либо с существенным увеличением массогабаритных характеристик телескопа и, соответственно, всего КА.
Новым подходом к повышению целевых характеристик космической системы оптико-электронного наблюдения представляется формирование группировки, включающей в себя большое количество малых (и дешёвых) КА, построенных по технологии CubeSat (рис. 1).
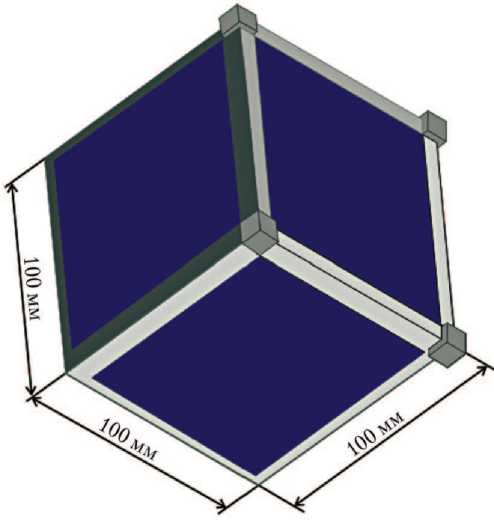
Рис. 1. Габариты модуля CubeSat (рисунок создан авторами)
Однако решение задачи управления такого рода группировками с увеличением количества маломассогабаритных КА (МКА) требует применения кардинально новых подходов. Трудно представить себе, что оператор сможет на практике управлять десятками и сотнями аппаратов, вручную перестраивая планы при наличии облачности, поступлении новых заявок, отказах аппаратов и т. д.
Одним из путей решения задачи является переход к созданию «умных группировок», отличающихся автономизацией создаваемых МКА за счёт автоматизации как процессов принятия решений на борту, так и процессов согласованного взаимодействия между МКА при решении поставленной целевой задачи. Такого рода самоорганизующиеся группировки МКА, построенные на основе природоподобного «роевого» интеллекта, получили название «рой МКА» по аналогии с роем пчёл.
Ключевой особенностью «умной группировки» является системный эффект при решении целевой задачи, который может быть достигнут за счёт автономного принятия решений на борту МКА и прямого взаимодействия между ближайшими МКА посредством радио-или оптического канала для выработки, согласования и принятия коллективных решений. Такую группировку (рис. 2) целесообразно сформировать на орбите с высотой, обеспечивающей разрешение не хуже 1 м, с последующей наземной обработкой информации и доведением пространственного разрешения снимка до 0,7 м, а геодезической привязки объектов на снимке без использования опорной информации — до 3–5 м.

Рис. 2. Вариант «роя» МКА (рисунок создан авторами)
В случае аппаратных ограничений для повышения качества и информативности изображений могут быть использованы методы сверхразрешения, т. е. искусственного улучшения пространственного разрешения за счёт объединения нескольких изображений с низким разрешением, полученных при съёмке одного и того же района интересов несколькими МКА из состава «роя».
Методы сверхразрешения активно развиваются и совершенствуются в последние годы. Наряду с известными подходами к получению сверхразрешения по серии изображений на основе методов интерполяции по неравномерной сетке, вейвлет-преобразования и адаптивной фильтрации, разрабатываются методы для обработки результатов многокамерной съёмки, в которых успешность получения более высокого пространственного разрешения существенно зависит от следующих факторов: точности настройки камер, входящих в систему, а также точности модели системы формирования изображений и её адекватности реальным условиям наблюдения [3, 4].
В процессе формирования космических снимков происходит естественная потеря пространственного разрешения, вызываемая искажениями, вносимыми звеньями сквозного информационного тракта. Необходимым условием для применения технологии сверхразрешения является наличие набора изображений, зарегистрированных относительно друг друга с некоторым субпиксельным сдвигом.
Технология обработки включает в себя три этапа: регистрацию , объединение и восстановление . На этапе регистрации определяются параметры геометрического преобразования между исходными изображениями и некоторой базовой системой координат. На этапе объединения пиксели исходных изображений путём интерполяции размещаются на равномерной прямоугольной сетке выходного изображения с улучшенным разрешением. На этапе восстановления для устранения частотных и шумовых искажений применяются методы фильтрации.
При отсутствии облачности и изменений объектов подстилающей поверхности, а также при условии проведения геометрического и яркостного согласования изображений, применение методов сверхразрешения открывает возможность выигрыша в разрешающей способности для слабоконтрастных объектов до 30% [5].
Влияние имеющихся на изображениях аппликативных помех (локальных областей закрытия) не может быть устранено путём фильтрации изображений. Однако в настоящее время разработаны комплексные алгоритмы получения многокадрового сверхразрешения, основанные на использовании глубоких свёрточных нейронных сетей на всех этапах обработки, включая регистрацию изображений и непосредственно повышение пространственного разрешения [6].
Для решения задачи высокопериодического наблюдения локального района предлагается особое построение «роя» МКА. В частности, наклонение орбиты МКА должно быть близким к широте локального района. В этом случае периодичность наблюдения даже одним МКА может достигать до трёх раз в сутки (рис. 3) [7]. В случае функционирования «роя» МКА можно повысить периодичность съёмки локального района от одного раза в 1,5 ч для трёх-четырёх МКА до одного раза в 20 мин для 20–25 МКА (рис. 4 и 5). Межспутниковый канал связи обеспечит единое информационное поле на орбите для всех МКА «роя», что позволит за счёт интеллектуализации бортовых систем и программного обеспечения без закладки дополнительной рабочей программы (РП) гибко («на лету») распределить площадь снимаемого района между МКА и контролировать выполнение задачи в автоматическом режиме непосредственно на орбите.
Таким образом, не потребуется разработка для каждого МКА своей индивидуальной РП, достаточно будет отправить координаты нового района съёмки на борт входящего в зону связи МКА из состава «роя». После попадания целевой задачи в информационное пространство «роя» МКА, на основе мультиагентных переговоров площадь района будет распределена между МКА автоматически. Для повышения оперативности оценки решения задачи на борт МКА необходимо установить специализированный вычислитель, проводящий экспресс-анализ качества отснятой информации, чтобы, например, в случае обнаруженной облачности, аппарат сам перестраивал свои планы для повторной съёмки или просил своих «собратьев по рою» помочь в решении задачи.
Вместе с тем, в случае прямого наклонения плоскость орбиты МКА, входящего в состав группировки, прецессирует против вращения Земли, вследствие чего возникают периодические разрывы в наблюдении заданных районов из-за ограничений бортовой аппаратуры по съёмке при низких углах Солнца. Для района, находящегося на широте около 35 ° с. ш., гарантированное прохождение любой точки района не реже одного раза в сутки обеспечивают не менее трёх орбитальных плоскостей [8].
Возможность создания «роя» МКА различных типов в настоящее время доказана мировым опытом [9–12]. Поэтому главная задача синтеза перспективных систем космического мониторинга на основе «роя» МКА заключается в нахождении и реализации таких компонент, интегрирование которых в конструкцию каждого МКА и в средства наземной инфраструктуры приёма и обработки информации обеспечивало бы переход от системы с жёстко детерминированным управлением к автономной «умной группировке», фактически объединяющей МКА и наземные станции в единую космическую систему, способную гибко и быстро перестраиваться и достигать поставленной цели, несмотря на любые возникающие события. Например, воздействие таких непредвиденных «турбулентных» событий, как приход новых приоритетных заказов, появление облачности, технические неисправности МКА, которые будут происходить чаще, чем в обычных КА (в силу хотя бы дешевизны построения спутников «роя»), не должны влиять на достижение создаваемой системой целевой функции.
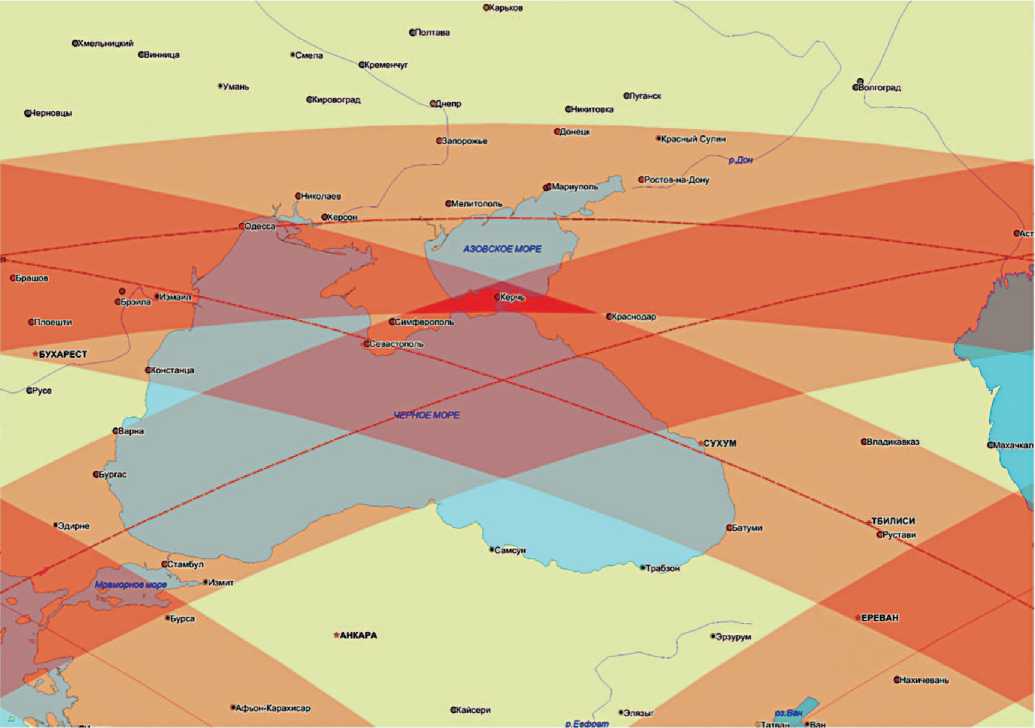
Рис. 3. Периодичность наблюдения локального района одним маломассогабаритным космическим аппаратом (рисунок создан авторами)
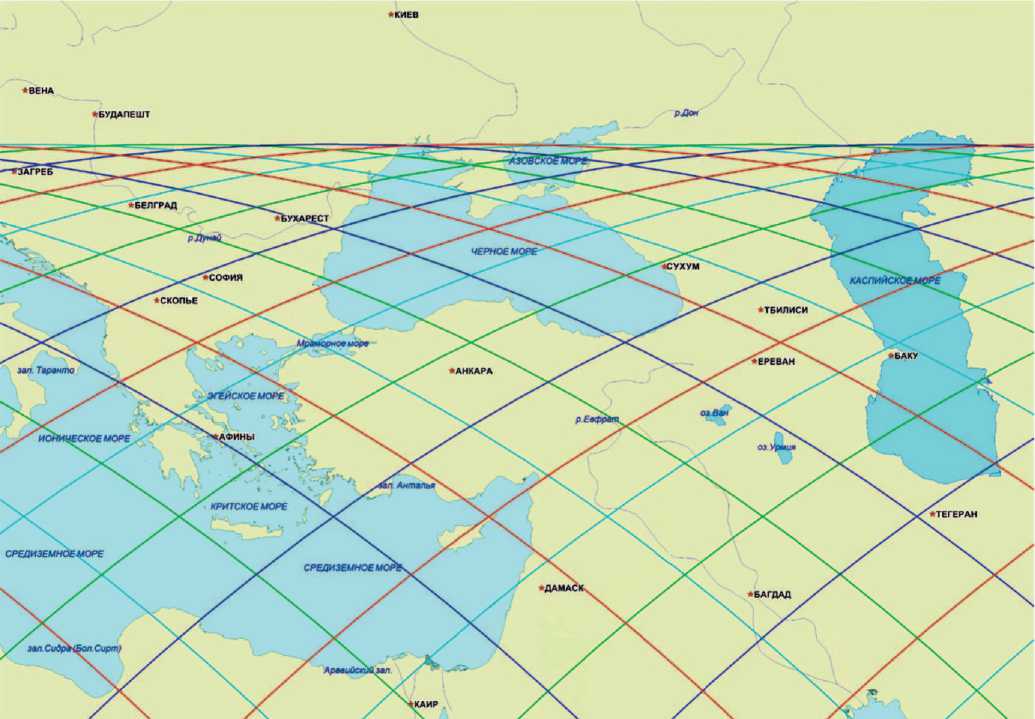
Рис. 4. Периодичность наблюдения локального района четырьмя маломассогабаритными космическими аппаратами (рисунок создан авторами)
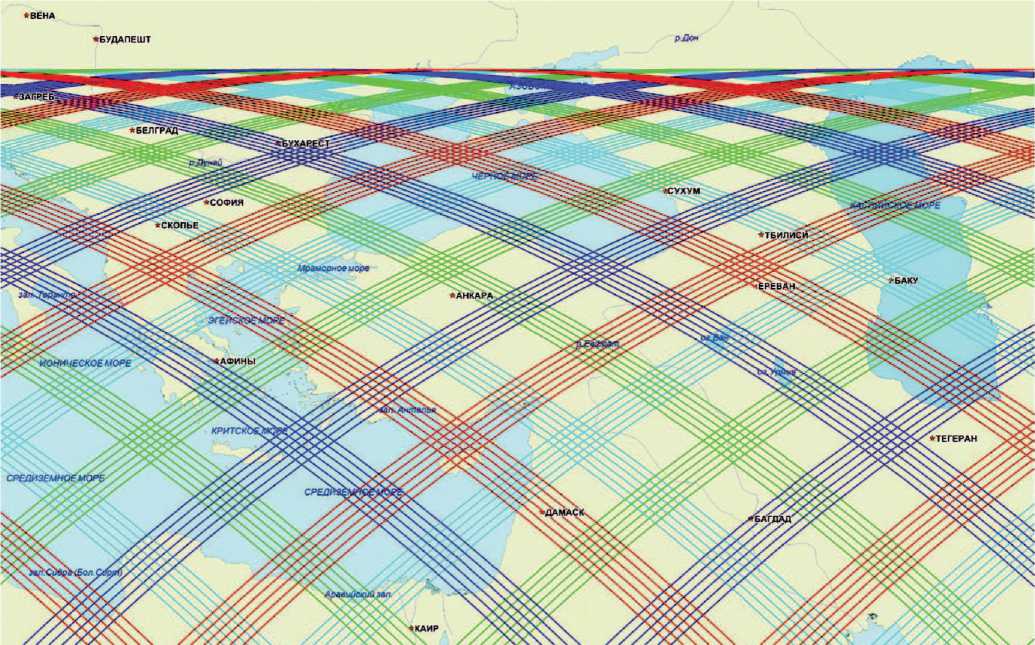
Рис. 5. Периодичность наблюдения локального района «роем» из 24 маломассогабаритных космических аппаратов (рисунок создан авторами)
Реализовать функционал «роя» МКА предлагается посредством:
-
• создания цифровой мультиагент-ной платформы «умной группировки» и единого информационного поля на её основе, обеспечивающего согласованное взаимодействие МКА в ходе решения целевых задач;
-
• использования наземных и бортовых автономных интеллектуальных систем управления МКА, взаимодействующих в платформе, способных на каждом МКА принимать решения и согласовывать их с другими МКА и станциями для динамического выбора приоритетов и адаптивного перестроения планов работы МКА при съёмке и передаче информации на наземный пункт приёма информации в зависимости от специфики решаемой задачи и имеющихся ограничений, сложившейся ситуации и технического состояния аппарата;
-
• реализации специализированных онтологий и баз знаний «умной группировки», включающих в себя информацию об объектах ДЗЗ, видах МКА и наземных станций, их свойствах и отношениях, решаемых задачах и используемой на борту аппаратуре;
-
• установки на борт МКА специализированного вычислителя, обеспечивающего экспресс-анализ качества отснятой информации;
-
• построения различного рода служебных систем и сервисов для поддержки функционирования группировки и предоставления требуемых услуг потребителям в реальном времени.
Под «онтологиями» при этом понимаются формализованные модели знаний предметной области, выраженные в виде семантической сети понятий и отношений, а под «базой знаний» — программный инструментарий их создания и построения логических выводов и навигации по такой сети.
научно-экспериментальная целевая работа «рой Мка»
В настоящее время в Госкорпорации «Роскосмос» готовится первая научноэкспериментальная целевая работа (ЦР) «Отработка технологии межспутниковых каналов связи и организации функционирования группы (роя) МКА» (шифр «Рой МКА»). Постановщиком задачи данной ЦР являются РКК «Энергия» и АО «ЦНИИмаш», а головным исполнителем — Самарский государственный технический университет (Центр интеллектуальных космических систем), обладающий собственными заделами и опытом по созданию промышленных мультиагентных систем для адаптивного управления ресурсами в реальном времени.
На первом этапе ЦР планируется создать и запустить в космическое пространство четыре МКА (форм-фактор 3U ), и на втором этапе — шесть МКА (форм-фактор 6U или 12U ). Общий вид разрабатываемых МКА формата 6U и 12U с оптико-электронной аппаратурой приведён на рис. 6 и 7 соответственно. Массогабаритные характеристики МКА второго этапа будут уточняться по результатам эскизного проекта.

Рис. 6. Общий вид МКА формата 6U (рисунок создан авторами)

Рис. 7. Общий вид МКА формата 12U (рисунок создан авторами)
На первом этапе планируется провести отработку межспутниковых каналов связи и функционирования «роя» МКА в едином информационном пространстве. На втором этапе, в зависимости от размещаемой полезной нагрузки, предполагается провести отработку бортовой автономной интеллектуальной системы (АИС), построенной на основе онтологий и мультиагентных технологий, для динамического выбора приоритетов и планирования работ МКА при съёмке и передаче информации в зависимости от сложившейся ситуа- ции, с частичным размещением вычислителя на наземных средствах. Рассматривается несколько вариантов полезной нагрузки, что в перспективе позволит расширить структуру признакового пространства добываемых распределённых данных.
Предполагается, что разрабатываемая мультиагентная система для адаптивного управления съёмочными ресурсами нескольких МКА из состава «роя» будет состоять из наземной и бортовой частей — АИС, реализованной на базе отдельной электронной платы. Наземная часть планирует работу группировки на дальний горизонт с учётом всех заявок. АИС на борту МКА обеспечивает выполнение укрупнённых планов и оперативно решает возникающие конфликты при решении целевой задачи. Решаемая целевая задача должна делиться на подзадачи, которые распределяются между МКА в «рое» с учётом особенностей складывающейся ситуации. При этом АИС является отдельной бортовой интеллектуальной системой управления «роем» МКА, играет роль «менеджера» каждого МКА и его коммуникатора, который согласовывает планы с аналогичными платами других МКА. Алгоритмы бортовой системы формируют планы на основе аукционоподобных протоколов взаимодействий по типу Contract Net [13], позволяющих достигать квазиоптимальных решений и обеспечить квазилинейный рост вы- числительных затрат с увеличением сложности задач и количества плани- руемых заявок, как показано в работе [14]. Такой подход обеспечивает возможность решения практических задач непосредственно на борту МКА с перспективой увеличения производительности указанных алгоритмов.
Одним из вариантов полезной нагрузки (на втором этапе ЦР) является оптикоэлектронная аппаратура. Массовая и энергетическая сводка МКА с формфактором 6 U второго этапа приведена в таблице.
Массовая и энергетическая сводка маломассогабаритного космического аппарата с форм-фактором 6U второго этапа
|
Приборный состав |
Потребляемая мощность, Вт |
Массовые характеристики, кг |
|
|
Дежурный режим |
Режим «Нагрузка» |
||
|
Оптико-электронная аппаратура |
10 |
25 |
4,3 |
|
Бортовая радиолиния |
1 |
15 |
2,7 |
|
Бортовая вычислительная машина |
0,5 |
5 |
0,25 |
|
Блок определения координат |
5 |
5 |
0,8 |
|
Измеритель угловой скорости |
0,05 |
0,10 |
0,10 |
|
Солнечный датчик |
0,05 |
0,10 |
0,20 |
|
Двигатели-маховики |
1,5 |
13,5 |
0,9 |
|
Силовые магниты |
0 |
6,0 |
0,3 |
|
Магнитометр |
0,05 |
0,10 |
0,10 |
|
Навигационный прибор |
2,0 |
2,0 |
0,2 |
|
Система электропитания |
0,5 |
1,5 |
4,4 |
|
Двигательная установка |
0 |
12,0 |
2,2 |
|
Автономная интеллектуальная система |
0,5 |
5,0 |
0,3 |
|
Суммарная потребляемая мощность |
~21 |
~90 |
– |
|
Масса конструкции |
– |
6 |
|
|
Суммарная масса МКА |
– |
~23 |
|
Ключевой особенностью такой группировки будет реализация системного эффекта при решении целевой задачи. В связи с тем, что запуск и дублирующее управление экспериментальным «роем» МКА планируется проводить с МКС, орбита которой известна, рабочая орбита «роя» МКА будет близкой к орбите МКС. Соответственно, разрешение должно быть на уровне 3 м (с учётом наземной обработки будет достигать 2,5 м), ширина полосы захвата для средней высоты орбиты около 450 км составит 12 км, что позволит решать большинство целевых задач наблюдения крупных объектов. Для съёмки локального района время работы целевой аппаратуры на витке составит ~15 с.
Приведённые оценки позволяют сделать следующие выводы:
-
• при ширине полосы захвата 12 км и максимальной длине маршрута 70 км площадь, снятая за виток, составит 840 км2;
-
• при трёх прохождениях одним МКА над локальным районом общая площадь за сутки составит более 2 500 км2.
Рассмотрим возможный сценарий применения «роя» МКА, который позволит продемонстрировать системный эффект при решении целевой задачи. В качестве демонстрационной рассмотрим задачу обнаружения морских браконьерских судов и слежения за ними. Как указывалось выше, реализовать функционал «роя» МКА предлагается путём создания цифровой мультиагентной системы. Эта система формируется сообществом агентов МКА, агентов заявок на съёмку и агентов наземных станций, способных благодаря согласованному взаимодействию выявлять и разрешать конфликты путём переговоров с уступками для выработки общего, всех устраивающего, т. е. согласованного, решения проблемы, когда каждый агент имеет свои локальные и индивидуальные критерии, цели, предпочтения и ограничения.
Целью системы является обнаружение подвижного судна и слежение за ним, когда каждый агент МКА проводит оценку полученной информации (помимо обработки видовой информации предполагается использовать автоматические идентификационные сигналы судов). Использование снимков из космоса совместно с информацией о движении и текущем местоположении судов по данным сигналов идентификации позволяет с высокой вероятностью обнаруживать суда, ведущие, например, незаконную промысловую деятельность. Для этого определяются координаты браконьерского судна, и эти координаты через межспутниковый канал связи передаются следующему МКА из «роя» так, чтобы он смог перенацелиться на движущийся браконьерский корабль, обнаружить его и вычислить его координаты, которые передаются следующему МКА из роя с учётом поправки на скорость движения судна.
Схема функционирования «роя» МКА в режиме обнаружения и сопровождения движущегося браконьерского корабля приведена на рис. 8.
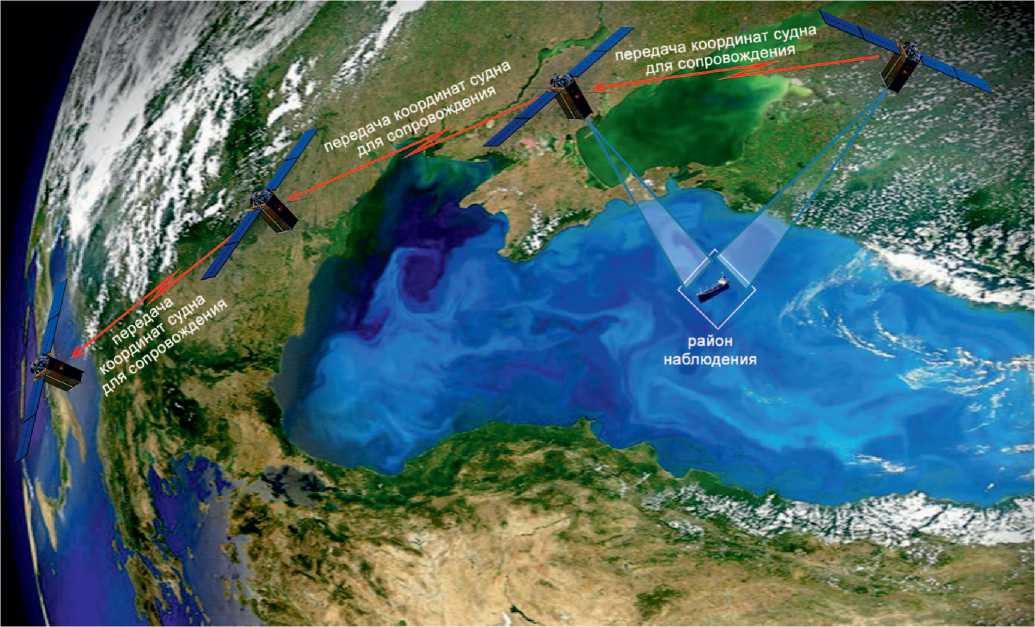
Рис. 8. Схема функционирования «роя» маломассогабаритных космических аппаратов в режиме обнаружения и сопровождения движущегося браконьерского корабля (рисунок создан авторами)
Как показано в работе [12], предлагаемый подход может не давать одного глобально-оптимального решения по планированию и оптимизации работы группировки, но зато он даёт приближённое (локально оптимальное), уточняемое при наличии времени, решение сложной многокритериальной задачи, причём в реальном времени. Важно отметить, что это решение является экономически целесообразным и объяснимым для пользователей. Кроме того, ещё одним важным преимуществом подхода является гибкость, позволяющая адаптивно (т. е. без останова и полного пересчёта заново) и оперативно перестраивать планы самоорганизующейся группировки МКА при любом изменении ситуации на орбите и в наблюдаемой среде, когда сама постановка этой задачи меняется.
Рассмотренные особенности предлагаемого подхода открывают принципиально новые возможности по созданию перспективных «умных группировок» МКА, дешёвых и быстро формируемых под любую складывающуюся ситуацию, в любом районе мира, оперативных и гибких, эффективных, производительных и масштабируемых.
заключение
Планируемый научный эксперимент в рамках ЦР «Рой МКА» позволит провести практическую отработку инновационных методов функционирования будущей «умной группировки» КА ДЗЗ, построенной по природоподобным принципам самоорганизации и эволюции, чтобы продемонстрировать повышение эффективности космического мониторинга и обеспечение качественно нового уровня ситуационной осведомлённости потребителей, а также уменьшить время доставки информации потребителю, постепенно обеспечивая переход к работе в реальном времени.
Новый подход к орбитальному построению системы МКА позволит добиться существенного улучшения эффективности решения целевых задач средствами оптико-электронного наблюдения. Это связано как с применением онтологий и мультиагентных технологий для принятия решений на борту и прямого взаимодействия МКА посредством обмена данными между ними в космосе по радиоканалу для принятия согласованных коллективных решений, так и с выбором типов орбит, которые обеспечат минимальный разрыв в наблюдении заданного района.
Список литературы Перспектива применения мультиагентного подхода в управлении орбитальной группировкой оптико-электронного наблюдения
- Бакланов А.И. Новые горизонты космических систем оптико-электронного наблюдения Земли высокого разрешения // Ракетно-космическое приборостроение и информационные системы. 201S. Т. 5. Вып. 3. С. 17-28. EDN: YQWXGP
- Егошкин H.A., Еремеев В.В., Козлов Е.П., Кузнецов A.E., Макаренков A.A., Москвитин AB., Пресняков O.A., Ушен-кин ВЛ. Повышение информативности космических изображений Земли: монография / Под ред. В.В. Еремеева. М.: КУРС, 2022. 368 с. (Серия «Наука»). EDN: CNYLAG
- Максимов AM., Сергеев В.В. Метод оптимального линейного сверхразрешающего восстановления изображений // Компьютерная оптика. 2021. Т. 45. № 5. С. 692-701. EDN: DETQMW
- Quevedo E., Marrero G., Tobajas F. Approach to super-resolution through the concept of multicamera imaging // Recent advances in image and video coding. InTechOpen, 2016. Chapter 5. P. 101-123. URL: https://doi.org/10.5772/65442 (accessed 06.08.2023).
- Ращупкин A.В. Методы обработки данных дистанционного зондирования для повышения качества выходных изображений // Вестник Самарского государственного аэрокосмического университета имени академика С.П. Королёва (Национального исследовательского университета). 2010. № 2(22). С. 124-133. EDN: NWDNFD
- Саввин С.В., Сирота A.A. Алгоритмы построения многокадрового сверхразрешения изображений в условиях аппликативных помех на основе глубоких нейронных сетей // Компьютерная оптика. 2022. Т. 46. № 1. С. 130-138. EDN: HMYGRB
- Мантуров A.M. Механика орбитального движения космических аппаратов дистанционного зондирования Земли: учебное пособие. Самара: Самарский научный центр Российской академии наук, 2012. 80 с.
- Чернов A.A., Чернявский Г.М. Орбиты спутников дистанционного зондирования Земли: лекции и упражнения: учебное пособие. М.: Радио и связь, 2004. 200 с.
- Bonnet J., Gleizes M.-P., Kaddoum E., Rainjonneau S., Flandin G. Multi-satellite mission planning using a self-adaptive multi-agent system // 9th IEEE International Conference on Self-Adaptive and Self-Organizing Systems (SASO 2015), September 21-25, 2015, Boston, MA, USA. P. 11-20. DOI: 10.1109/SASO.2015.9
- Tonetti S, Cornara S, Heritier A., Pirondini F. Fully automated mission planning and capacity analysis tool for the DEIMOS-2 agile satellite // Workshop on Simulation for European Space Programmes (SESP), March 24-26, 2015, ESA-ESTEC, Noordwijk, The Netherlands. № 1760. P. 1-15.
- Picard G., Car on C, Farges J.-L., Guerra J., Pralet C, Roussel S. Autonomous agents and multiagent systems challenges in Earth observation satellite constellations // 20th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2021), May 3- 7, 2021, Virtual. P. 39-44.
- Skobelev P., Myatov G., Galuzin V., Galitskaya A., Ivanov A., Chernyavskii A. Design of an autonomous distributed multi-agent mission control system for a swarm of satellites // International Conference on Agents and Artificial Intelligence (ICAART 2022), February 3 -5, 2022. Vol. 1. P. 408-416. D OI:10.5220/0010917400003116
- FIPA contract net interaction protocol specification // Foundation for Intelligent Physical Agents: web site. URL: http://www.fipa.org/specs/fipa0 0029/ SC00029H.html (accessed 06.08.2023).
- Грачев С.П., Жиляев А.А., Ларю-хин В.Б., Новичков Д.Е., Галузин В.А., Симонова Е.В., Майоров И.В., Скобелев П.О. Методы и средства построения интеллектуальных систем для решения сложных задач адаптивного управления ресурсами в реальном времени // Автоматика и телемеханика. 2021. № 11. C. 30-67. EDN: ZLESZX
