Перспективные волоконно-оптические датчики для систем управления медицинскими роботами

Автор: Степанов Максим Владимирович
Журнал: Вестник медицинского института "РЕАВИЗ": реабилитация, врач и здоровье @vestnik-reaviz
Рубрика: Общественное здоровье и здравоохранение
Статья в выпуске: 2 (22), 2016 года.
Бесплатный доступ
Рассмотрены принципы построения магнитооптических датчиков перемещений для систем управления медицинскими роботами. Приведены результаты математического моделирования характеристик волоконно-оптического дифференциального датчика перемещения. Представлены полученные практические результаты.
Робот, датчик перемещения, эффект фарадея, математическое моделирование
Короткий адрес: https://sciup.org/14344192
IDR: 14344192 | УДК: 681.2.082
Promising fiber-optic transducers for medical robot control systems
The article studies the design concept of magnetooptic motion detecting transducers for medical robot control systems. Observations from mathematic simulation of fiber-optic differential motion detecting transducer’s performance are presented. Gained working knowledge is presented.
Текст научной статьи Перспективные волоконно-оптические датчики для систем управления медицинскими роботами
В наше время робототехника является одним из перспективных направлений развития науки и техники. Возможности и сфера применения роботов постоянно расширяются. Одной из областей применения робототехники является медицина: созданы роботы для проведения малоинвазивных хирургических операций, ухода за пациентами, роботизированные протезы конечностей и т. д. Для управления этими роботами используется массив датчиков, формирующих информационную картину окружающей обстановки и информацию о положении исполнительных устройств (манипуляторов) робота. В современных роботах, как правило, применяются датчики с электрическим выходным сигналом, которые чувствительны к внешним электромагнитным полям, что может сказываться на стабильности управления роботами.
В качестве альтернативы датчикам с электрическим выходным сигналом рассматриваются волоконно-оптические датчики (ВОД) с закрытым оптическим каналом, так как они не подвержены воздействию внешних электромагнитных полей и имеют ряд других достоинств: не имеют электрического питания, взрывобезопасны, имеют широкий динамический диапазон измерений, высокую чувствительность, возможность интегрирования массива датчиков в один волоконно-оптический канал [1, 2]. Среди ВОД в последнее время часто рассматриваются датчики на основе магнитооптического эффекта Фарадея.
Структурная схема волоконно-оптического дифференциального датчика перемещения (ВОДДП) на основе магнитооптического эффекта приведена на рисунке 1. Он состоит из двух чувствительных элементов (ЧЭ) и двух электронных преобразователей. Световой поток Ф 0 источника света 1 (светодиод, лазер) с круговой поляризацией через многомодовое оптическое волокно 2 и поляризатор 3 проходит через магнитооптический элемент (МОЭ) 4, где под воздействием магнитного поля, сформированного постоянным магнитом 5 и магнитопроводом 6, происходит поворот плоскости поляризации на угол φ. Далее световой поток проходит через анализатор 7, выделяющий две ортогональные составляющие светового потока Ф 1 и Ф 2 , которые через многомодовое волокно 2 поступают на фотоприемные устройства 8, 9.
Рис. 1. Структурная схема ВОДДП на основе магнитооптического эффекта
В этом случае величины световых потоков, поступающих на фотоприемные устройства 8 и 9, определяются выражениями [1]:
Ф 1Д ( х ) = а • Ф 0 • е - ch [(1 - k ) Sin 2 ( Ф пг ± Ф о ( Н ср . ( х ))) + к ] , (1)
Ф.,2 (х) = а • Фо • е -ch [(1 - к) Sin2 (Фпг ± Фо (НСр. (х))) + к ], где а - коэффициент, учитывающий оптические потери в поляризаторе и анализаторе; Ф0 – световой поток падающего на поляризатор; c – коэффициент оптического поглощения МОЭ; h – толщина МОЭ; k – коэффициент, учитывающий неполноту погасания в системе поляризатор – МОЭ – анализатор; φ0 – угол установки между поляризатором и анализатором; Фпг – угловое отклонение от положения погасания в системе поляризатор – анализатор (здесь и в дальнейшем верхний апостроф «"» относится к элементам левой части ВОДДП).
Выходной сигнал Y вых (х) ВОДДП определяется следующим образом:
Y вых ( х ) = Y Ч х ) - Y ( х ) , (2)
где Y ( х ) = Y ( х ) -Y( х ) ; Y ■( х ) = Y V х ) - Y 2, ( х )
Y 1( х ) + Y 2( х ) Y ( х ) + Y 2 ( х )
– выходные сигналы правого и левого элек-
тронных преобразователей соответственно; Y ( х ) = Kt • Ф ( х ) ; Y ( х ) = K, • Ф 2 ( х );
Y "( х ) = K • Ф "( х ) и У 2"( х ) = K • Ф 2"( х ) - сигналы на выходах ЧЭ; К7 - коэффициент, учитывающий преобразование световых потоков Ф 1 , Ф 2 ЧЭ в электрический сигнал.
Среднее значение напряженности магнитного поля Нср ( х ) , H .,( х ) в месте расположения чувствительных элементов 4 можно найти:
J ( Н ( х ) Дп )dS J ( Н ^( х ) ,1 n )dS
H cp. (х ) = S --------------; H .p. (х ) = S-------------- , (3)
где 1„ - единичный вектор нормали к поверхности интегрирования; S - площадь поверхности
МОЭ 4; H ( х ), H ( х ) - напряженность магнитного поля в направлении единичного вектора 1Я.
Тогда из выражения (2) с учетом (1) и (3) можно определить позиционную характеристику (ПХ) ВОДДП Y вых (х) . Для этого была определена полная магнитная проводимость
Л ^ (х)=1/К е (х) по методике, изложенной в [3] и далее получена зависимость напряженности магнитного поля Нср ( х ) , H" ( х ) от положения постоянного магнита.
В результате были получены: позиционная зависимость магнитной проводимости Л ^ (х) , ПХ ВОДДП, координатная зависимость приведенной погрешности нелинейности 5(х) ПХ ВОДДП (рис. 2).
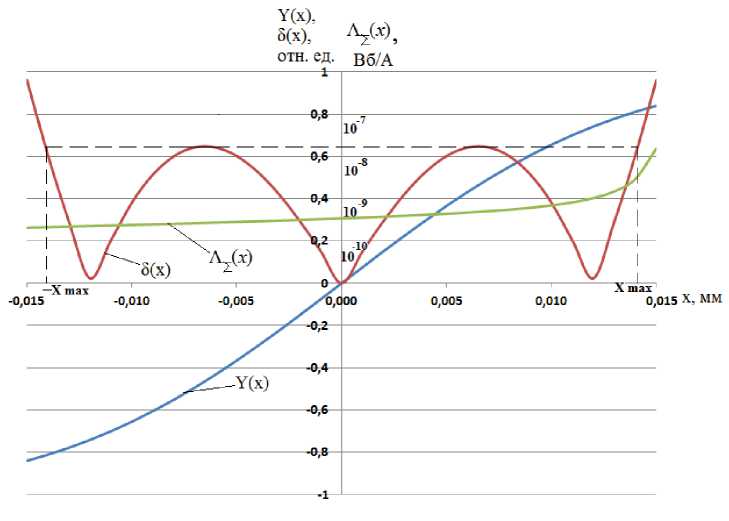
Рис. 2. Графики зависимости магнитной проводимости Λ ∑ (х) от перемещения магнита, позиционной характеристики ВОДДП Y(х), распределения приведенной погрешности нелинейности δ(x) ПХ по диапазону перемещения
Максимальная величина погрешности нелинейности ПХ (рис. 2) составляет 3,56 %. Задача линеаризации ПХ может быть решена несколькими путями, в т. ч.:
-
1. Алгоритмическим путем (за счет математической обработки выходного сигнала ФУ в микропроцессоре с учетом калибровочных коэффициентов, записанных в его память).
-
2. Конструкторским путем, суть которого заключается в следующем. Пусть между подвижной частью (постоянным магнитом) и ЧЭ размещается магнитопровод, профилированный по некоторому закону. Тогда при перемещении постоянного магнита изменяются как величина зазора между постоянным магнитом и ЧЭ, так и величина зазора между постоянным магнитом и магнитопроводом. За счет выбора соответствующего профиля магнитопровода, возможна линеаризация ПХ, например, используя идеи [4].
На основе полученных теоретических результатов профиль магнитопровода (для датчика недифференциальной конструкции), обеспечивающий линейность ПХ, изображен на рис. 3 (кривая 1).
Для построения ВОДДП необходимо использовать два магнитопровода, профили которых представлены на рис. 3 (кривая 1, 2). Это позволит дополнительно снизить нелинейность позиционной характеристики почти в 8 раз (экспериментально полученные результаты) до величины 0,45 %. Дальнейшая линеаризация ПХ ВОДДП возможна алгоритмическим путем.
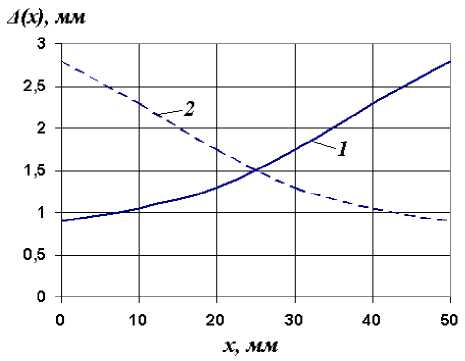
Рис. 3. Профиль магнитопровода, обеспечивающий линейность ПХ.
На основе полученных теоретических и практических результатов исследований в настоящее время разработан ряд ВОД физических величин, успешно прошедших испытание [5–7].
Рассмотренные в статье ВОД позволяют создавать быстродействующие и мало чувствительные к электромагнитным воздействиям системы управления медицинскими роботами. Кроме того, использование в качестве канала передачи информации ВОЛС делает возможным применение различных видов уплотнения каналов, в т. ч. спектрального [2].
Список литературы Перспективные волоконно-оптические датчики для систем управления медицинскими роботами
- Sergey A. Matyunin, Yuriy A. Fedotov, Orhan G. Babaev, Mikhail K.Wirchenko, Mikhail Yu.Gusev, Nikolai St. Neustroev. Fiber-optical sensors based on mono-crystal films of garnet ferrites for mechatronic systems//Procedia Engineering. 2015. №106. S. 202-209.
- Степанов М.В. Система сбора информации c МОС-датчиков со спектральным уплотнением//Известия Самарского научного центра Российской академии наук. -2009. -Т. 11. -№ 3. -С. 94-97.
- Постоянные магниты: Справочник/А.Б. Альтман, А.Н. Герберг, П.А. Гладышев и др.; под ред. Ю.М. Пятина. -М.: Энергия, 1980.
- Конюхов Н.Е. Электромеханические функциональные преобразователи. -М.: Машиностроение, 1977.
- Матюнин С.А., Федотов Ю.А., Бабаев О.Г., Вирченко М.К., Неустроев Н.С. Волоконно-оптические сенсоры на монокристаллических пленках феррит-гранатов для мехатронных систем//Труды второй МНТК «Динамика и виброакустика машин 2014», 15-17 сентября 201 4 г., Самара, СГАУ, 2014 г. -№ 2. -С. 737-743.
- Матюнин С.А., Мадриченко В.Г. Волоконно-оптический преобразователь перемещения для контроля состояния пневмогидравлической системы ракетоносителя//Тезисы докладов региональной научно-практической конференции, посвященной 50-летию первого полета человека в космос. 14-15 апреля 2011 г., Самара, СГАУ, 2011 г. -С. 188-189.
- Матюнин С.А., Федотов Ю.А., Бабаев О.Г. Прилуцкий Д.А. Бесконтактные волоконно-оптические сенсоры мехатронных систем//Труды второй МНТК «Динамика и виброакустика машин 2014», 2014 г. -Самара, СГАУ, 2014. -№ 2. -С. 731-736.
