Перспективы и ограничения применения активных магнитных подшипников, их приложение к турбомолекулярному вакуумному насосу

Автор: Гайбатов Р.С.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 9 (15), 2016 года.
Бесплатный доступ
Магнитные подшипники все чаще используются в различных областях промышленности. Их уникальные особенности делают их привлекательными для решения проблем подвеса ротора и позволяют найти новые подходы в проектировании вращающихся узлов машин. С помощью магнитных подшипников классические ограничения могут быть преодолены, и диапазоны характеристик расширены. Но в этой области техники все еще остаются проблемы, обусловленные сегодняшним состоянием науки и техники. Для помощи в разработке и проектировании магнитных подшипников и применении их в турбомолекулярных насосах (ТМН) в настоящей статье обсуждаются такие проблемы.
Магнитный подшипник, динамика ротора, турбомолекулярный вакуумный насос
Короткий адрес: https://sciup.org/140269864
IDR: 140269864
Outlook and limitations of active magnetic bearing, their application to turbomolecular vacuum pump
Magnetic bearings are being used increasingly in various industrial fields. Their unique features make them attractive for solving rotor suspension problems and allow us to find new approaches in the design of rotating machinery components. By using magnetic bearings classical constraints can be overcome, and the range of characteristics can be extended. But in the art are still problems caused by the current state of science and technology. To assist in the development and design of magnetic bearings and their application in turbo molecular pumps (TMP) in this article discusses these problems.
Текст научной статьи Перспективы и ограничения применения активных магнитных подшипников, их приложение к турбомолекулярному вакуумному насосу
Первоначально, три десятилетия назад, активные магнитные подшипники (АМП) были разработаны с целью преодоления недостатков обычных подшипников качения или скольжения. В исследовательских лабораториях они показали свою способность работать в вакууме без какой-либо смазки и с отсутствием загрязнений рабочего пространства, на высоких скоростях и с формированием новой динамики ротора. Сегодня магнитные подшипники введены в промышленный мир как очень ценный элемент машины с рядом особенностей и большим диапазоном применений. Сейчас поднимаются вопросы о потенциале этих подшипников: какие опыты были проведены, какие достижения в области магнитных подшипников, физические ограничения, что ожидается в будущем? В этой статье обсуждаются ключевые проблемы и приводятся примеры применений магнитного подвеса.
Грузоподъемность
Термин грузоподъемность затрагивает основные свойства магнитных подшипников. Допустимая нагрузка зависит от расположения и геометрии электромагнитов, магнитных свойств материала, мощности электроники, а также законов управления - устройство с основными элементами показано на рис. 1. Магнитные силы возникают в магнитном поле.
Магнитные поля могут быть получены с помощью токов или постоянных магнитов. Например, магнитное поле вокруг проводника с током (рис. 2а). Контурный интеграл вокруг проводника говорит, что
^ Hds = i
Откуда следует, что величина напряженности магнитного поля на (рис. 2а) равна H = i /2пг. Магнитное поле не зависит от материала вокруг проводника. Если путь интегрирования
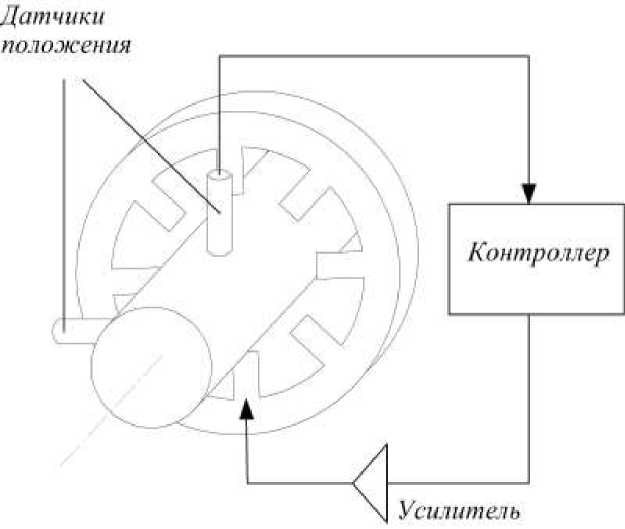
Рис. 1
включает в себя несколько токовых петель, как в случае с воздушной катушкой, изображенной на (рис. 2б), то
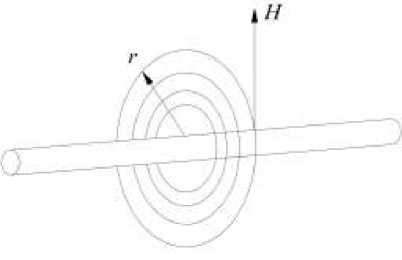
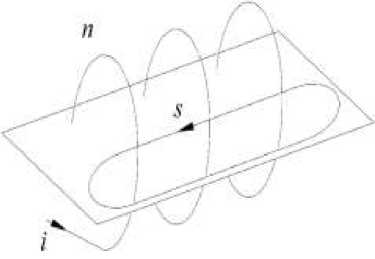
Рис. 2а Рис.2б
^ Hds = ni (2)
В магнитном подшипнике электромагниты заставляют магнитный поток циркулировать в витках электромагнита. Магнитный поток Ф можно визуализировать с помощью силовых линий магнитного поля. Плотность этих линий представляет собой плотность потока магнитной индукции B. Напряженность магнитного поля H связана с магнитной индукцией зависимостью
В = (0(H (3)
Здесь ( 0 = 4л10 -7 Гн/м - магнитная постоянная, ц - магнитная проницаемость, зависящая от среды, в которой действует магнитное поле. Магнитная проницаемость равна 1 в вакууме, приблизительно равна 1 в воздухе. При использовании ферромагнитного материала, у которого ( >> 1, магнитное поле концентрируется внутри этого материала. Поведение
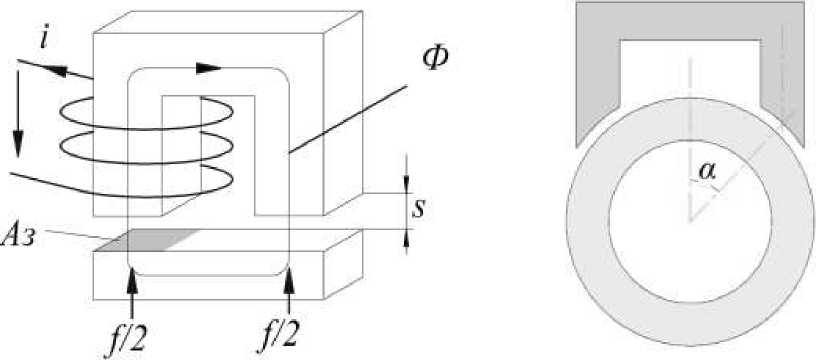
Рис. 3а Рис. 3б ферромагнетика обычно визуализируется на B-H диаграмме, показывая явления гистерезиса и насыщения. Насыщенность означает, как следствие, что при увеличении напряженности магнитного поля H и генерирующего тока i, значение магнитной индукции B практически перестает возрастать при достижении индукции насыщения Bнас. Ток, соответствующий этому пределу насыщения, называют током насыщения isat.
Для исследования сил, возникающих в АМП, рассмотрим рисунок 3а. На нем изображен один двухполюсный элемент как часть кольца подшипника, показанного на рисунке 1, с указанием контура магнитного потока Ф. Вводятся следующие допущения: магнитный поток Ф однороден в железном сердечнике и воздушном зазоре, площади поперечного сечения равны A р = A c . Возникающая сила f может быть получена путем рассмотрения энергии W a , заключенной в зазоре между ротором и магнитом.
W3=-BHV3 = -ВНАр2 (4)
Сила, действующая на ферромагнитное тело, порождается энергией поля в воздушном зазоре и может быть описана функцией положения ротора. Для маленьких смещений ds магнитный поток BA р можно принять постоянным. Когда воздушный зазор ds увеличивается, объем зазора V з = 2sA р также возрастает, а энергия W з в увеличивается на dW з . Таким образом
f =
dW3 ds
= ВН Ар
В2А р В о
В области, где индукция B пропорциональна магнитному полю H и току i, т.е. ниже насыщения, зависимость силы от тока катушки и воздушного зазора s (рис. 3а)
ni 1 i2 i2
f = BoAa(2s)2 = 4Bon2A3S2 = ks2
Уравнение (6) показывает, что сила пропорциональна квадрату силы тока и обратно пропорциональна квадрату воздушного зазора. В реальном радиальном магнитном подшипнике, сила с каждого магнитного полюса действует под углом α (рис. 3б). В случае подшипника с четырьмя парами полюсов α = 22.50. С учетом этого
f = тМоП2А3 —cos a = k — cosa
4 s2 s2
При увеличении числа витков n , увеличивается сила f . Значение n ограничивается особенностями конструкции. Оно зависит от сечения обмотки, длины намотки, допустимого выделения тепла, размеров подшипника. Таким образом, одним из ограничений для достижения высокой статической нагрузки является увеличение выделений тепла при росте значения ni. Это препятствие может быть преодолено с помощью подходящей конструкции.
Если предположить, что эта проблема решена, то есть максимальный ток i max может достигнуть значения насыщения i нас , тогда балансирующая сила может достигнуть своего максимального значения f max . В этом случае любая перегрузка приведет к тому, что ротор выйдет из своего центрального положения и приземлится на страховочных подшипниках.
Сравним несущие способности подшипников различных размеров, которые можно задать внутренним диаметром подшипника d и его шириной b. На одну двухполюсную пару приходится восьмая часть окружности. Тогда суммарная площадь сечений полюсов магнита
^ з
nd
= т6
В сталях, используемых в магнитных подшипниках, рекомендуемый максимальный поток магнитной индукции Bmax = 1.5 Тл < Bнас. С учетом уравнения (8) получим fmax
db
В max^ n c ^ on Н
—^0^cos8 = 32 см2
На основании этого результата построены графики (рис. 4), позволяющие оценить грузоподъемности подшипников различных размеров. Следует заметить, что удельная грузоподъемность смазываемых подшипников превышает это значение почти в 4 раза. Использование дорогих сплавов на основе кобальта с потоком насыщения B нас , превышающим 2 Тл, несущая способность подшипников может достигать 60 ^.
Статическая жесткость
Жесткость магнитного подшипника характеризуется отношением изменения силы, действующей на ротор, к перемещению ротора. В АМП сила генерируется током управления, который корректируется в соответствии с требуемой нагрузкой. Одним из способов достижения высокой статической грузоподъемности является применение PID-контроллера. Посредством контроллера ток в обмотке регулируется по следующей зависимости
Г Ddx
i = Рх + I I xdt + -^т" (10)
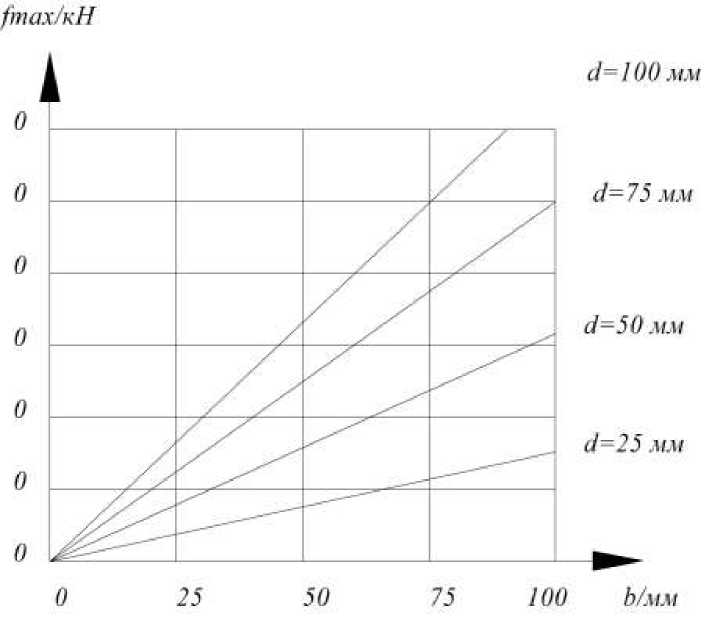
Рис. 4
На рис. 5 показаны смещения ротора с использованием PID-контроллера и без него.
смещение
без контроллера
с контроллером
время
Рис. 5
Скорость
Функции, характеризующие высокоскоростной ротор, можно рассматривать под различными аспектами. Термином «высокоскоростной» может относиться к частоте вращения ротора, окружной скорости ротора в подшипнике, окружной скорости в сечении наибольшего диаметра, или к скорости, превышающей первую критическую скорость вала. Требования к АМП могут сильно различаться.
Частота вращения.
Существует запись более чем пятидесятилетней давности о достижении частоты вращения в 300 кГц, которая была реализована в эксперименте по тестированию прочности материала маленьких стальных шариков (около 1-2 мм в диаметре) под действием центробежной нагрузки [1]. В сегодняшней промышленности реализуются частоты около 3 кГц для шлифовального шпинделя, или 5 кГц для небольших турбомашин. Перед разработчиками возникают проблемы, связанные с вихревыми токами и потерями на гистерезис.
Окружная скорость
Окружная скорость является мерой измерения центробежной силы и приводит к определенным требованиям к конструкциям и материалам. Центробежные нагрузки вызывают тангенциальные и радиальные напряжения в роторе, задаваемые уравнениями [4]
1 r, 2r,2
°t = -pw2[(3 + v)(rz2 + ra2) + (3 + v)—---(1 + 3v)r2)],
1 r 2r,-2
^r = X P^2 (3 + v)(ri2 +ra -—^--r2)(12)
8r
Наиболее высокие значения тангенциального напряжения возникают на внутренней границе диска ротора. Так как ротор магнита состоит из пакета листовой мягкой стали, который устанавливается на вал термопосадкой, тангенциальные напряжения оказываются больше рассчитанных по формуле (12). Скорость вращения ротора в зоне подшипника до 340 м/с может быть достигнута с использованием листов из аморфного металла, имеющего хорошие магнитные и механические свойства. Теоретическое значение для скорости
V
max
лежит гораздо выше этого значения и может быть получено из уравнения 13 (
8О с
^ = J(3 + v)p (13)'
Сверхкритические скорости
Ротору иногда приходится проходить одну или несколько критических скоростей изгиба для достижения рабочей скорости. В классической динамике ротора решение этой задачи может вызвать затруднения. В АМП-технологии используется контроллер, который должен обеспечивать стабильное поведение ротора. Во многих лабораторных экспериментах была успешно преодолена вторая критическая скорость, например в работе [2]. Три упругих режима были рассмотрены в работе [3]. Требуются дальнейшие исследования в области разработки методов управления для высокоэластичных систем.
Высокие температуры
Применение активных магнитных подшипников в ТМН открывает широкие перспективы для дальнейших исследований. В высоком вакууме значительно снижается отведение тепла, поэтому подшипник должен работать надлежащим образом при высоких температурах. Рабочая температура 6000С была достигнута при скорости вращения ротора 50000 об/мин [4]. Проблемы, возникающие перед разработчиками, заключаются в подборе материала, особенностях производства, разработкой высокотемпературного датчика смещения.
Потери
Использование бесконтактных опор избавляет ротор от трения. Работа активных магнитных подшипников вызывает гораздо меньше потерь, чем обычные шариковые подшипники, но тем не менее потери должны быть приняты во внимание [5]. Потери могут разделены на возникающие в неподвижных частях, в самом роторе, и потери, связанные с конструкцией системы управления. Потери в неподвижных частях возникают преимущественно в медных обмотках статора и в усилителе. Потери в медных частях являются источников тепла, и, если не предусмотрено достаточное охлаждение, это может ограничить контроль тока и, следовательно, максимально достижимую балансирующую силу. Потери в роторной части являются более сложными и приводят к более серьезным ограничениям. Эти потери обусловлены гистерезисом, вихревыми токами и сопротивлением воздуха или другой рабочей среды. Потери на гистерезис Ph возникают, если при повторном намагничивании B-H кривая движется вдоль петли гистерезиса. В каждом цикле энергия уменьшается на величину W^ = VCABH. Здесь, Авн - площадь петли гистерезиса, VC - объем металла, обхватываемого обмоткой. Следовательно, потери на гистерезис пропорциональны частоте повторного намагничивания fT. Площадь петли гистерезиса зависит от материала магнита и амплитуды изменения плотности потока. Для железа и плотности потока в диапазоне 0.2 – 1.5 Тл
Ph = khfTBk6Vc (14) где константа kh должна быть получена из измерений потерь и площади петли гистерезиса. Очевидно, что применение магнитомягкого материала с небольшой площадью петли приведет к снижению этих потерь. Потери на вихревые токи Ре появляются, когда плотность потока в пределах сердечника изменяется, и вследствие этого генерируются большие вихревые токи. Потери на вихревые токи могут быть уменьшены путем деления железного сердечника на отдельные листы. Чем меньше эти деления, тем меньше потери вихревые токи. Потери в слоистом железе могут быть вычислены приближенно, если поток в листах распределяется по синусоиде или равномерно.
Р = —7r2e2f2B2
ге 6рП С fr тт*с
Здесь р - удельное электрическое сопротивление, е - толщина листов, fT
- частота повторного намагничивания, Вт - максимальная плотность потока.
Точность
Под точностью в роторных машинах будем понимать насколько точное положение ротора гарантировано. Она в первую очередь зависит от качества поверхности деталей. Но также подвижные части магнитного подшипника - это левитирующие объекты с датчиком смещения с обратной связью. Производительность АМП напрямую зависит от качества сигнала сенсора. Точное управление положением ротора облегчается при отсутствии гистерезиса и вызывающих деформации источников тепла, которые в свою очередь зависят от материала деталей и конструктивных особенностей. Датчики перемещения, широко используемые в системе АМП, очень чувствительны к качеству поверхности ротора, поэтому они требуют дополнительных алгоритмов для обнаружения и компенсации сигналов, вызванных неточностями геометрии.
Заключение
Ограничения в области магнитных подшипников можно разделить на два типа: обусловленные нынешним состоянием науки и техники, а также законами природы. В проделанной работе приводится обзор таких ограничений с краткими теоретическими сведениями и примерами. Они могут оказать помощь разработчикам магнитных подшипников. Направления дальнейших исследований представляются в развитии понимания и перспектив в области магнитных подшипников. Работа магнитного подшипника в аварийных ситуациях нуждается в дальнейших исследованиях. Работа при сверхкритических скоростях требует совершенствования конструкций и системы управления. Потенциал и ограничения высокотемпературных сверхпроводников для системы управления АМП не изучены в полной мере. Все выше перечисленное говорит об актуальности дальнейших исследований в области магнитного подвеса ротора.
Список литературы Перспективы и ограничения применения активных магнитных подшипников, их приложение к турбомолекулярному вакуумному насосу
- Beams J., The production of high centrifugal fields [Текст] / J. Beams J. Young // J. Appl. Phys - 1946. - С. 886-890
- Larsonneur R., Design and control of active magnetic bearing system for high speed rotation. [Текст] / R. Larsonneur // Diss. ETH Zurich Nr. 9746 - 1990.
- Fujiwara H, Stability Evaluation of High Frequency Eigen Modes for Active Magnetic Bearing Rotors [Текст] / H Fujiwara, O Matsushita // 7th Internat. Symp. on Magnetic Bearings, ETH Zurich - 2000. - С. 83-88
- Mekhiche M., 50 krpm, 1,100F magnetic bearings for jet turbine engines [Текст] / M Mekhiche, S Nichols, J Oleksy // 7th Internat. Symp. on Magnetic Bearings, ETH Zurich - 2000. - С. 123-128
- Mizuno T, Experimental measurement of rotational losses in magnetic bearing - [Текст] / H Fujiwara, O Matsushita // 4th Internat. Symp. on Magnetic Bearings, ETH Zurich - 1994. - С. 591-595
- Журавлев Ю.Н. Активные магнитные подшипники: Теория, расчет, применение. СПб.: Политехника, 2003. 206 с.
- Савельев И.В. Курс общей физики: учебное пособие для втузов. М.: Наука, 1986. 432 с.
- Бессонов П. А. Теоретические основы электротехники. М.: Высшая школа, 1973. 752 с.
- Колесников К. С. Механика в техническом университете. М.: Издательство МГТУ им. Н. Э. Баумана, 1999. 592 с.
- Руковицын И.Г., Применение электромагнитных подшипников в газовой промышленности[Текст] / И. Г. Руковицын, А. П. Сарычев // Компрессорная техника и пневматика - 2008. - №1. - С. 12 - 14.
