ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ РЕЖИМА ПАРАМЕТРИЧЕСКОГО ИЗЛУЧЕНИЯ

Автор: Е. В. Волощенко
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Системный анализ приборов и измерительных методик
Статья в выпуске: 3, 2024 года.
Бесплатный доступ
Проведен анализ ультразвуковых (УЗ) способов для измерения параметров морского волнения и технических характеристик реализующих их устройств. Основное внимание уделено перспективе использования "бестелесной" параметрической излучающей антенны (ПИА) в новом качестве — как инструмента для косвенной оценки степени неровности поверхности моря при проведении измерений гидроусловий на прибрежной акватории. Выбраны схема и методика измерений, аппаратура измерительной установки, что позволило провести калибровку используемой ПИА в диапазоне генерируемых волн разностной частоты, а также осуществить модельные эксперименты по изучению закономерностей рассеяния УЗ-поля при облучении нескольких акустически мягких пластин-отражателей, имеющих различные параметры синусоидального профиля неровностей. На основе анализа полученных результатов предложен способ измерения параметров взволнованной морской поверхности, например, для режима широкополосного бистатического облучения (излучатель и приемник разнесены в пространстве) УЗ-сигналами со стороны дна.
Параметрическая излучающая антенна, рассеяние УЗ-волн на взволнованной границе раздела вода-воздух
Короткий адрес: https://sciup.org/142242718
IDR: 142242718 | УДК: 551.46.086, 534.222.2
PROSPECTS FOR THE APPLICATION OF HYDROACOUSTIC SYSTEMS USING PARAMETRIC RADIATION MODE TO MEASURE SEA WAVE CHARACTERISTICS
The analysis of ultrasonic methods for measuring the parameters of sea waves and the technical characteristics of the devices implementing them is carried out. Among the devices, the main attention is paid to the prospect of using a "virtual" parametric transmitting array (PTA) in a new way — as a tool for indirectly assessing the degree of sea surface roughness when measuring hydro conditions in coastal waters. The measurement scheme and methodology, the instrumentation of the measuring installation were opted to calibrate the employed PTA in the range of generated difference frequency waves, as well as to carry out model experiments to study the patterns of ultrasonic field scattering when irradiating several acoustically soft reflector plates with different parameters of the sinusoidal profile of irregularities. Based on the analysis of the results obtained, a method for measuring the parameters of rough sea surface is proposed, for example, for the mode of broadband bistatic irradiation (the oscillator and receiver are spaced apart) with ultrasonic signals from the bottom.
Текст научной статьи ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ РЕЖИМА ПАРАМЕТРИЧЕСКОГО ИЗЛУЧЕНИЯ
Получение информации о ветровых волнах и течениях в водной среде является основной целью осуществляемых морских наблюдений на акваториях портов, гаваней и заливов. Это требует разработки новых методов исследований, проведения лабораторных и морских испытаний различных приборов и осуществления телеметрии данных в реальном времени. Измерения поверхностного волнения на месте ( in situ ) являются составной частью программ экологического мониторинга, что актуально для калибровки и проверки усовершенствованных моделей прибрежного волнообразования, при проектировании, строительстве и оперативном планировании портов и гаваней и т.д., требуя накопления большого количества надежных и точных экспериментальных данных измерений высоты, периода и направления бега волн [1].
Существует несколько способов и реализующих их устройств для измерения этих параметров морской волны [2–5], среди которых традиционным инструментом являются гидроакустические эхоимпульсные локаторы в моностатическом режиме обращенного эхолота (upward или up-looking sonar) [6]. При этом электроакустический преобра- зователь (ЭАП) установлен на донной поверхности, излучает вертикально вверх УЗ-импульсы, которые отражаются от границы раздела вода – воздух, расстояние до которой непрерывно изменяется по закону, характеризующему волнение моря. Это позволяет регистрировать в процессе измерений волновой профиль бегущей поверхностной ветровой волны, определить ее период, форму и высоту. Так, данным способом задачу решает прибор Wavesonar фирмы ASL Environmental Sciences (в основе разработки которого Upward looking instrument, the Ice Profiling Sonar — IPS, "вверхсмотрящий" сонар-профилограф нижней кромки льда) [7]. ЭАП установлен на крышке цилиндрического корпуса, излучает в воду в направлении нормали к границе раздела вода – воздух короткие импульсы УЗ-сигналов с частотой заполнения 420 кГц. ЭАП поршневого типа обеспечивает угловой раствор 907 = 1.8° по уровню (-3 дБ) основного лепестка характеристики направленности (ХН), что позволяет обеспечить на поверхности моря как малый диаметр пятна облучения (0.9, 3.1 и 6.3 м для дистанций 30, 100 и 200 м соответственно), так и высокое пространственное разрешение по углу. Прибор устанавливают в составе при-топленной буйковой станции на несущем буе с поплавками, заглубленном от поверхности воды на дистанцию до 225/55 м и закрепленном в необходимой точке подводного объема с помощью троса и донного якоря (глубина акватории до 2000 м). Высота волны измеряется прямым методом по временнóй задержке отраженного импульсного сигнала от поверхности воды, чем достигается достаточно высокая точность и достоверность измерений. Период волны измеряется в результате обработки серии экспериментальных наблюдений, полученных эхозондированием с периодичностью не менее двух измерений в секунду. Для измерения спектра направленности волнения требуется одновременно использовать три синхронизированных прибора, разнесенных по дну на некоторой базе и установленных в вершинах треугольника.
ПОСТАНОВКА ЗАДАЧИ
В настоящее время наметилась тенденция объединения измерений характеристик поверхностных волн и течений [8–10] при осуществлении регулярного мониторинга на мелководной акватории, что потребовало разработки новых как технологий, так и приборов. В [11] представлены результаты подобных измерений с помощью устройств Acoustic Doppler Current Profiler (ADCP), установленных на донной поверхности, отличием которых является применение систем наклонных относительно вертикали лучей — "Janus" (четыре луча по сторонам света) и "Bugeye" (3+1: три луча, разнесенные на 120° в горизонтальной плоскости, плюс один вертикальный, как у волнографа).
Следует отметить, что, кроме выше отмеченного, предложено в конкретных реализациях устройств ADCP использовать УЗ-сигнал необходимой частоты, например большей величины — для мелководных участков, и наоборот, что позволит получать информацию о подводной обстановке с необходимой степенью детализации. Это достигается за счет дальнейшей модернизации конструкций ЭАП, основной подход к которой описан в [12, 13]. Изначально решалась проблема рыбо-поиска — исключение УЗ-помех взаимного влияния от гидролокаторов, установленных на соседних промысловых судах. Многорезонансность конструкции ЭАП обеспечивается за счет последовательного объединения пьезоэлектрических дисков одинакового/различного диаметра, составленных соосно торцами и скрепленных через центральные отверстия болтом-стяжкой. В местах соединений выведены электрические контакты, расположение которых от одного из его краев составляет соответственно восьмую, четвертую и половину от резонансной длины собранного ЭАП. По мнению проектировщиков, данные конструкции при различных вариантах коммутации электрических контактов обладают несколькими резонансными частотами, достаточно равномерно распределенными в диапазоне 15–200 кГц [12, 13] при приемлемых значениях чувствительностей в режимах как излучения, так и приема. К недостаткам данных стержневых ЭАП следует отнести большие весогабаритные характеристики, сложность конструкции. В качестве иллюстрации вышеописанного упомянем [14], в котором рассмотрены корреляционные лаги Consilium SAL (Speed Automatic Log) со сложными конструкциями цилиндрических антенных блоков из поршневых резонансных ЭАП. Например, TRU R1 (диаметр 0.032 м, высота 0.16 м и масса 3.7 кг) имеет два ЭАП с резонансными частотами 3.84 и 4.196 МГц. Антенный блок TRU (диаметр 0.12 м, высота 0.144 м и масса 23 кг) устроен сложнее: пять ЭАП с резонансной частотой 150 кГц для измерения абсолютной скорости судна в диапазоне регистрируемых глубин 0–250 м (3 излучают, все пять принимают), два ЭАП с резонансной частотой 4 МГц для измерения относительной скорости на сигналах объемной реверберации при минимальной глубине 3 м под килем.
Увеличение количества рабочих УЗ-сигналов для устройств ADCP за счет технологических особенностей изготовления ЭАП предложено в [15].
Табл. 1. Тактико-технические характеристики типовых ЭАП для ADCP [16]
|
f , кГц |
λ , м |
d , м |
A БП , дБ |
α , дБ/м |
r , м |
W A , Вт |
|
|
76.8 |
0.02 |
0.28 |
5 |
(–36) |
0.022–0.028 |
700 |
250 |
|
153.6 |
0.01 |
0.165 |
4 |
(–36) |
0.039–0.050 |
400 |
250 |
|
307.2 |
0.005 |
0.133 |
2.2 |
(–41) |
0.062–0.084 |
120 |
80 |
|
614.4 |
0.0025 |
0.1 |
1.5 |
(–42) |
0.14–0.20 |
60 |
30 |
|
1228.8 |
0.0013 |
0.054 |
1.4 |
(–42) |
0.44–0.66 |
25 |
15 |
Суть технического решения заключается в использовании необходимого количества импедансных анизотропных согласующих слоев в виде дисковых накладок, обладающих заданными величинами коэффициентов теплового расширения при матрично-волокнистом искусственном заполнении их объемов. Тактико-технические характеристики типовых ЭАП для устройств ADCP представлены в табл. 1 [16].
Проведем анализ записанных в табл. 1 данных. Действительно, приведенные цифры соответствуют известному соотношению для приближенных расчетов угловой ширины основного лепестка ХН θ0.7 на уровне 0.7 (в градусах) для плоского поршневого ЭАП диаметром d в зависимости от его волнового размера d / λ , где λ = = c0 / f — длина волны и частота f УЗ-сигнала, распространяющегося со скоростью с0 в водной среде. Как и следовало ожидать (см. правую часть табл. 1), режимы эксплуатации ЭАП различны: каждый ADCP при заданных уровнях как излучаемой акустической мощности WA , так и коэффициенте затухания α УЗ в морской воде, обеспечивает требуемую дальность действия r. Заявленный уровень бокового поля AБП от (–36 дБ) до (–42 дБ) указан для областей УЗ-поля (см. [16, фиг. 23]), находящихся за пределами 4-го бокового интерференционного лепестка, т.е. при отклонении точки наблюдения на ~ ±15° относительно акустической оси ЭАП. Внутри же телесного сектора (~ 30°), как и положено, есть 1-й, 2-й, 3-й и т.д. боковые лепестки с уровнями –18 дБ (по теории, 13% от основного), –24 дБ (по теории, 6% от основного), –28 дБ (по теории, 4% от основного) и т.д., что может создать в точке приема нежелательную помеху. Уточним, что на практике в устройствах ADCP при реализации измерительных каналов с использованием лучей различной конфигурации — как "Janus", так и "Bugeye" [11] — все равно предполагается применение одинаковых ЭАП, что ограничивает универсальность их применения, например, при облучении снизу вверх с придонной (глубины до 700 м) / приповерхностной (глубины до 25 м) области шельфа. Это напрямую видно из цифр, приведенных в табл. 1. Так, для дальности r = 700 м применяются ЭАП с рабочей частотой 76.8 кГц при затухании УЗ около 0.022–0.028 дБ/м и излучаемой акустической мощности WA = 250 Вт, а для дальности r = 120 м — ЭАП с рабочей частотой 307.2 кГц при затухании УЗ около 0.062–0.084 дБ/м и излучаемой акустической мощности WA = 80 Вт.
Отметим, что в процессе проектирования гидроакустической аппаратуры разработчики за счет увеличения энергетического потенциала локатора стараются получить от ЭАП максимально возможную излучаемую мощность. Однако водная среда обладает нелинейностью своих упругих свойств, что приводит к возникновению "новых" спектральных составляющих при распространении интенсивной УЗ-волны с частотой f (самовоздей-ствие) [17], например генерации высших гармонических составляющих с частотами 2 f , 3 f , _ , nf . Оценим с точки зрения линейности и нелинейности режимы работы ЭАП промышленных образцов ADCP, рабочие характеристики которых представлены в [16]. Расчетные данные для анализа сведены в табл. 2, в которой три верхние строчки — для ЭАП устройств ADCP, а четвертая — для ЭАП эхолота "Пескарь" [18] в режиме параметрического излучения (РПИ), что позволит осуществить объективное сопоставление и наметить тенденцию развития.
Взаимовлияние нелинейных и дифракционных эффектов на УЗ-поле ЭАП с пьезоэлементом радиуса a может быть охарактеризовано с помощью параметра Хохлова N = l P/ 1 д [19], где l P = p 0 c 3 / sa0p 0 — расстояние (м) образования разрыва плоской волны с частотой а>0 = 2 п • f , (рад/с) и амплитудой звукового давления p 0 (Па) у поверхности излучателя; ρ 0 , c 0 — равновесные значения плотности и скорости звука для воды; ε = = 3.5 — нелинейный параметр воды; l Д = = а 2 а>0/2с 0 , — длина (м) области дифракции Френеля для волны накачки с центральной частотой ω 0 (рад/с). В [19] при численном моделировании процесса распространения звукового пучка в водной среде соотношение нелинейных и дифракционных эффектов, т.е. параметр N , задавалось следующим образом: N = 2.5 — нелинейность сравнительно слаба, но достаточна для формирования ударной волны в идеальной среде; N = = 1.6 — средняя нелинейность и N = 0.8 — сильная нелинейность. Из табл. 2 видно, что только для ЭАП с резонансной частотой f = 76.8 кГц нелинейностью водной среды можно пренебречь, в то время как для ЭАП с резонансными частотами f = 153.6 кГц и f = 307.2 кГц нелинейный режим работы практически осуществлен и генерация высших гармоник имеет место (нелинейный эффект самовоздействия).
Табл. 2. Расчетные данные
|
Ссылка; f , кГц |
W A , Вт |
I , Вт/см2 |
с |
l Д , м |
d , м |
l Р , м |
p 0 · 105, Па |
N |
|
[16]; f = 76.8 |
250 |
0.4 |
5 |
3.1 |
0.28 |
32.4 |
0.77 |
8.18 |
|
[16]; f = 153.6 |
250 |
1.2 |
4 |
2.1 |
0.165 |
9.6 |
1.353 |
3.53 |
|
[16]; f = 307.2 |
80 |
0.6 |
2.2 |
2.8 |
0.133 |
5.34 |
0.94 |
1.91 |
|
[18]; f 0 = 275; f 1,2 = 250, 300; F = 50 |
70 |
2.1 |
5 |
0.6 |
0.065 |
1.2 |
2.5 |
2.0 |
Этот вывод подкрепляют расчетные и экспериментальные значения для ЭАП эхолота "Пескарь" [18] в режиме генерации волны разностной частоты (ВРЧ) F -=\ f 2 - f 1 1= 50 кГц в водной среде (нижняя строка табл. 2) при излучении сигналов накачки с частотами f 1 , f 2 = 250, 300 кГц (нелинейный эффект взаимодействия), находящихся в пределах полосы пропускания (~ 60 кГц) этого ЭАП, причем именно это позволяет плавно перестраивать величину ВРЧ и, соответственно, длину ее волны.
Таким образом, из данных, представленных во второй снизу строке табл. 2, можно сделать вывод о том, что ADCP, использующий 4 ЭАП с частотами f = 307.2 кГц, можно отнести к системе активной локации, функционирующей в рамках нелинейной акустики, в частности, генерирующей высшие гармонические составляющие с частотами 2f,3f,...,nf. Проведем анализ расчетно-экспериментальной спектрограммы излучения эхолота "Пескарь" [18], отображающей уровни звуковых давлений для компонент полигармонического сигнала на акустической оси сформированной параметрической излучающей антенны (ПИА) для дистанции 10 м (рис. 1).
Видно, что нелинейное взаимодействие сигналов накачки с частотами f 1 , f 2 = 250, 300 кГц позволило расширить частотный диапазон излучения не только вниз, но и вверх, например, при использовании третьих гармоник до 900 кГц, что практически перекрывает диапазон рабочих частот всех пяти ЭАП для ADCP из табл. 1.
Морская поверхность является подвижной и неровной границей раздела, переизлучаемое ею УЗ-поле состоит из двух компонент — регулярной, сформированной вблизи зеркального направления, и случайной, образующей рассеянное поле в нижней полусфере, причем соотношение регулярной и случайной компонент переизлученного поля определяется соразмерностью длины волны λ УЗ и расстояния h от "вершин" и "подошв" бегущей поверхностной волны [20]. Указанная выше особенность широкополосного излучения "бестелесной" ПИА, в частности на "длинноволновой" ВРЧ-
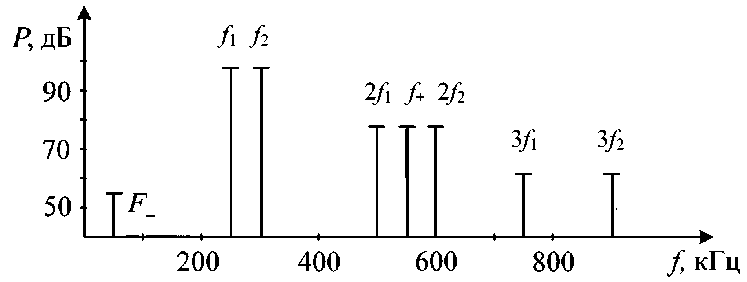
Рис. 1. Расчетно-экспериментальная спектрограмма излучения эхолота "Пескарь"
спектральной компоненте, позволяет сделать предположение о том, что использование в устройствах ADCP эффектов нелинейной акустики может быть перспективным.
ВЫБОР МОДЕЛИ ПАРАМЕТРИЧЕСКОЙ ИЗЛУЧАЮЩЕЙ АНТЕННЫ И СХЕМЫ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ
Умение практического применения высокоинтенсивных УЗ-волн, т.е. нелинейных эффектов, важно для разработки современных приложений в системах интроскопии, медицинской диагностики, подводной акустики и т.д. В семидесятых годах прошлого века в Таганроге [21] основной темой нелинейной акустики в интересах как гражданского, так и военного приложений явились исследования ПИА, обусловленные особенностями УЗ-поля ВРЧ — постоянно-высокая направленность основного лепестка без бокового поля в значительной полосе частот при небольших весо-габаритных характеристиках ЭАП. Так, в метрологии большое внимание уделялось уменьшению габаритов аппаратуры, повышению ее производительности, а также проектированию средств измерений, обладающих излучающим трактом с малоизменяющимися в широкой полосе частот акустическими параметрами [22]. В этой связи проводились работы по разработке измерительных широкополосных ПИА вместе с комплектом радиоэлектронной аппаратуры (РЭА) типов НАП (нелинейный акустический преобразователь), НАИ (нелинейный акустический излучатель) как стандартных излучателей для измерения характеристик гидроакустических антенн и образцовых гидрофонов в бассейнах заводских испытательных лабораторий [21]. Условия пространственной ограниченности измерительных бассейнов и определили ряд требований как к РЭА, так и к ЭАП для ПИА в режиме генерации ВРЧ. Это в целом соответствует и условиям нашего планируемого эксперимента, в котором необходимо сформировать УЗ-излучение в малом и постоянном по величине телесном угле для большого диапазона длин волн ВРЧ Λ = c 0 / f 2 - f 1 при использовании ЭАП с высокочастотной накачкой f 1 , f 2 и небольшими по величинам длинами как ближней зоны l д, м, так и зоны взаимодействия l з , м.
Проанализируем технические характеристики некоторых из них — НАП (3, 4) и НАИ (5, 6, 8, 9), перечисленные в [21, таблица 2].
Диапазон частот / длин волн ВРЧ, кГц / м, — от 0.3 / 5 до 300 / 0.005;
угловая ширина основного лепестка ХН в диапазоне частот — от (1.5 ± 0.5)° до (5.0 ± 0.5)°;
для перекрывания диапазона ВРЧ применялись до двух ЭАП с плоскими/слабоискривленными пьезоэлементами диаметров от 20 до 50 мм с резонансными частотами от 0.5 МГц до 4.75 МГц;
длины ближней зоны, м, — от 0.04 до 0.65;
зона сферического распространения, м, — от 0.3 до 3;
длина зоны взаимодействия, м, — от 0.8 до 15;
непрерывный/импульсный режим работы; длительность импульса, мс, — 0.06–12.0;
частота следования импульсов, Гц, — 0.5– 400.0.
Отметим, данные устройства обеспечивали небольшой, но стабильный уровень звукового давления — около 10 Па на дистанции 3 м для ВРЧ 10 кГц / 0.15 м, что входило в требуемые параметры технических заданий и решало проблему разработки новых компактных образцовых средств измерений, позволяющих проводить лабораторную градуировку, близкую к условиям свободного поля.
Схема измерительной установки для исследования пространственных характеристик ПИА, объединяющая спектральный метод, основанный на выделении гармонических составляющих сформировавшегося полигармонического сигнала, и наблюдение формы многокомпонентной волны, представлена на рис. 2. РЭА-элементы измерительной установки структурированы по трактам излучения, приема, наиболее подробно выделен акустический тракт. Рассмотрим последовательно функционирование установки. Электрический сигнал биений частот накачки f 1 , f 2 с блока формирования 1 (генераторы сигналов специальной формы АКИП ГСС-05, GW Instek MFG-72120MA, сумматор, режекторные фильтры для подавления на 40–50 дБ комбинационных сигналов, образующихся в электронном тракте) подается через усилитель мощности 2 (FRANKONIA VLC-220) на ЭАП 4. С дополнительных выходов блоков 1 и 2 осуществляется синхронизация функционирования блоков в трактах излучения и приема. С помощью осциллографа 3 (GW Instek GOS-6103C) осуществляется контроль параметров электрического сигнала, поступающего на ЭАП 4, который на поворотно-выдвижном устройстве (ПВУ) 7 установлен в заданной части бассейна 5 (длина 6 м, ширина 3 м, глубина 2 м). Его внутренние поверхности снабжены поглощающим покрытием 6.
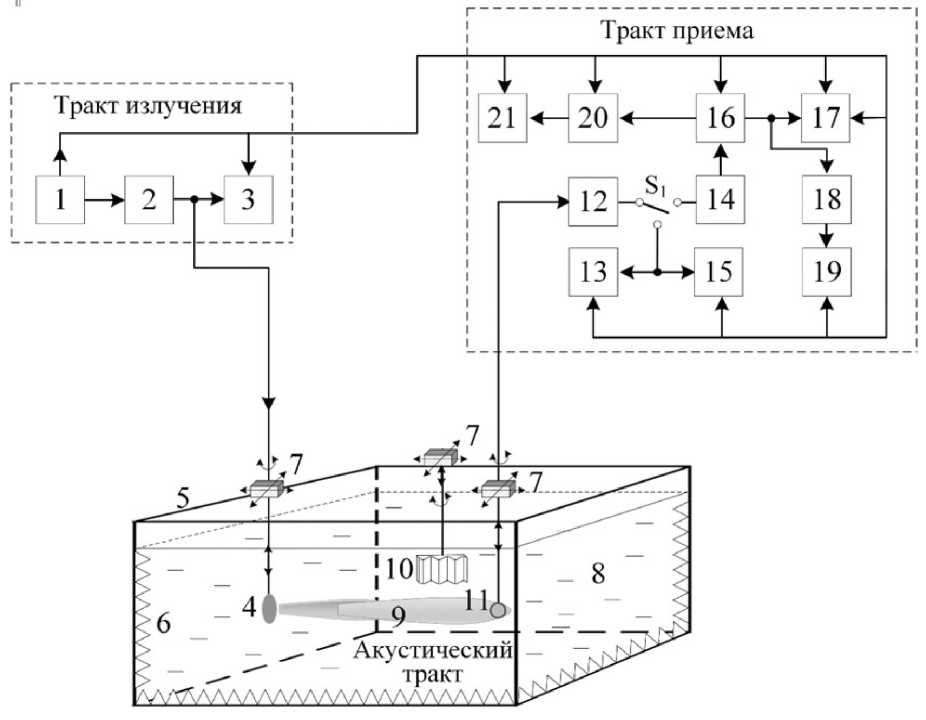
Рис. 2. Структурная схема измерительной установки.
1 — блок формирования сигнала; 2 — усилитель мощности сигнала; 3 — осциллограф; 4 — ЭАП; 5 — бассейн; 6 — внутреннее поглощающее покрытие; 7 — поворотно-выдвижное устройство; 8 — пресная вода; 9 — сформированная ПИА; 10 — пластина-отражатель; 11 — гидрофон; 12 — согласующий каскад; 13 — осциллограф; 14 — перестраиваемый резонансный усилитель; 15 — анализатор спектра; 16 — стробирующее устройство; 17 — осциллограф; 18 — детектор; 19 — самописец уровня; 20 — АЦП; 21 — компьютер
Бассейн 5 заполнен пресной водой 8, что и образует акустический тракт установки, основным элементом которого является сформированная ПИА 9, расположенная в средней части водного объема бассейна 5. К акустическому тракту можно отнести и акустически мягкую пенопластовую пластину-отражатель 10 с синусоидальным профилем неровностей на одной из граней, которая размещена на той же глубине с помощью своего ПВУ 7 вблизи одной заглушенной стенки бассейна 5 (рис. 2) и будет облучаться УЗ-сигналами в планируемом модельном эксперименте.
Отметим, что целью данной работы является оценка перспектив применения для измерения характеристик морского волнения гидроакустических систем с использованием режима параметри- ческого излучения. В этой связи в качестве упрощенной модели взволнованной, но статичной в данный момент времени морской поверхности с заданными параметрами волнения использовалась акустически мягкая пенопластовая пластина-отражатель 10 с синусоидальным профилем неровностей на одной из граней. Пенопласт для моделирования акустически мягкой границы можно использовать, т.к. акустическое сопротивление пенопласта 0.048·106 кг/м2с << акустического сопротивления воды 15·106 кг/м2с, что определяет условие противофазности падающих и отраженных УЗ-волн.
При расчете периодичности распределения неровностей на пластинах-отражателях 10 был использован принцип масштабирования. Так, если в натурных условиях шельфа при облучении с глубины 100 м в пятно засветки размером 15 м попадает три элемента поверхностного волнения длиной волны 5 м и размахом 1 м каждый, то для лабораторного эксперимента — дистанция ~ 1 м и пятно уменьшается до 0.15 м, на котором размещены те же три элемента с длиной волны по 0.05 м и размахом 0.01 м. Исходя из этих соображений, для проведения экспериментов были выбраны следующие пространственные характеристики синусоидального профиля неровностей пластин-отражателей 10: расстояние между максимумами (минимумами) на отражающей поверхности λпов = 0.03, 0.05, 0.06 м при размахе (двойная амплитуда) h = 0.002, 0.005, 0.010, 0.015, 0.02 м, что при обратном пересчете для шельфа будет составлять — длины волн поверхностного волнения 3, 5, 6 м при двойной амплитуде 0.2, 0.5, 1, 1.5, 2 м.
Исходя из представленного выше анализа для формирования ПИА, использовался один из вариантов ЭАП, который был разработан для НАИ-9: форма пьезоэлемента — плоский диск диаметром d = 21 мм, закрепленный по периметру за счет вклейки в герметичный корпус; резонансная частота f 0 = 2.12 МГц, длина волны Л 0 = с 0 / f 0 = = 0.708 мм, где c 0 — скорость звука в воде (1500 м/с); расчетное значение длины ближней зоны (области дифракции Френеля) l д = 0.45 м. Значения частот f 1 , f 2 выбирались из расчета уменьшения (увеличения) величин относительно f 0 , например, для ВРЧ F _ =\ f 2 - f 1 1 = 100 кГц частоты для волн накачки равны f 1 = ( 2120 - 50 ) кГц , f , = (2120 + 50) кГц. Таким образом, в акустическом тракте измерительной установки можно было осуществлять изменение ВРЧ в диапазоне длин волн Л, мм / частот F - , кГц:
Л = 21.4 мм / F - = 70 кГц;
Л = 15мм/ F _ = 100 кГц;
Л = 10мм/ F _ = 150 кГц;
Л = 7.5мм/ F — = 200 кГц.
Тракт излучения позволял изменять длительность импульса излучения в диапазоне: т имп = 0.06 v 0.1 мс и, соответственно, пространст- венную протяженность посылки в воде lимп = 0.09 v 0.15 м. Расчетное значение угловой ширины Θ0.7 по уровню 0.7 для УЗ-пучка накач- ки с резонансной частотой f0 составило в.,=60 Yd
= 2.023°. Если округлить величину ширины пучка до ~ 3°, то при нормальном облучении с дистанций 1 м / 2 м / 3 м размер пятна на поверхности пластины-отражателя 10 с синусоидальным профилем неровностей составлял около 5 см / 10 см / 16 см. В этой связи размеры пластины-отражателя 10 с синусоидальным профилем неровностей были выбраны 20 × 30 см, причем моделируемый синусоидальный профиль "остановленной" поверхностной волны выполнен вдоль более длинной стороны, а ее волновые фронты — параллельны более короткой стороне.
Описанные в [21, 23] структурные схемы испытательных стендов отличаются от рассмотренной выше тем, что в акустическом тракте ПИА используются пластины, образующие как отдельные резонансные акустические фильтры, так и системы поглощающих слоев различной формы и размеров. Эти элементы, моделирующие совокупность границ раздела различных сред, располагали на акустической оси ЭАП в области нелинейного взаимодействия высокочастотных волн накачки для ее как ограничения, так и изменения формы. Отметим, что в цели описываемого эксперимента искусственное ограничение области взаимодействия не входит, наоборот, предполагается естественное формирование ПИА в гидроакустическом канале, что соответствует режиму измерения ха- рактеристик морского волнения гидроакустическими системами с использованием РПИ на шельфе при зондировании со стороны дна. В нашем эксперименте пластина-отражатель 10 с синусоидальным профилем неровностей моделирует взволнованную границу раздела вода-воздух, т.е. "остановленную" поверхностную волну, которая, рассеивая определенным образом ВРЧ, может позволить при обработке получить информацию о поверхностном волнении.
В [24, 25] изложены и обобщены результаты разработок ПИА с относительно низкочастотными и высокоинтенсивными волнами накачки, которые использовались в гидроакустических системах дальней локации, в частности, рассмотрены характеристики ВРЧ в слоистых средах и при наличии границ раздела в протяженной области взаимодействия. Так, если граница раздела попадает в область взаимодействия ПИА, то, помимо искажения ее конфигурации, появляется часть пространства, где взаимодействуют не только падающие, но и отраженные волны, что влияет на пространственные характеристики результирующего поля излучения ВРЧ. Это может осложнить, например, обнаружение малоразмерных объектов, находящихся на дне или погруженных в донный грунт, которое осуществляется на фоне сложной помеховой обстановки при зондировании сверху вниз с надводного судна или подводного буксируемого носителя ПИА [24].
Калибровка ПИА как средства измерения
Для оценки основных характеристик ПИА 9 как предполагаемого средства измерения, обладающего излучающим трактом с малоизменяющимися в широкой полосе частот акустическими параметрами, были проведены серии измерений пространственных распределений амплитуд звукового давления ВРЧ в указанном выше диапазоне. Для этого ЭАП 4 и гидрофон 11 были установлены в средней части водного объема 8 измерительного бассейна 5 при четырехметровом удалении друг от друга. Тонкая окончательная юстировка их взаимного размещения на горизонтальной акустической оси ЭАП 4 достигалась перемещением "вверх-вниз" и "влево-вправо" гидрофона 11, результатом чего являлось получение максимального уровня сигнала по накачке на экране осциллографа 13.
Типичные результаты для ПИА, генерирующей в водной среде 8 УЗ-сигнал ВРЧ F - = | f 2 - f 1| = 150 кГц, представлены на рис. 3.
В результате измерений было установлено:
-
1) Из рис. 3 следует, что максимум звукового давления ВРЧ находится приблизительно на расстоянии 0.2 м, которое является границей ближней зоны ЭАП 4 для волн накачки. Ранее была рассчитана величина ближней зоны 0.45 м, уменьшение ее длины обусловлено условиями закрепления
ЭКСПЕРИМЕНТАЛЬНЫЕ РЕЗУЛЬТАТЫ
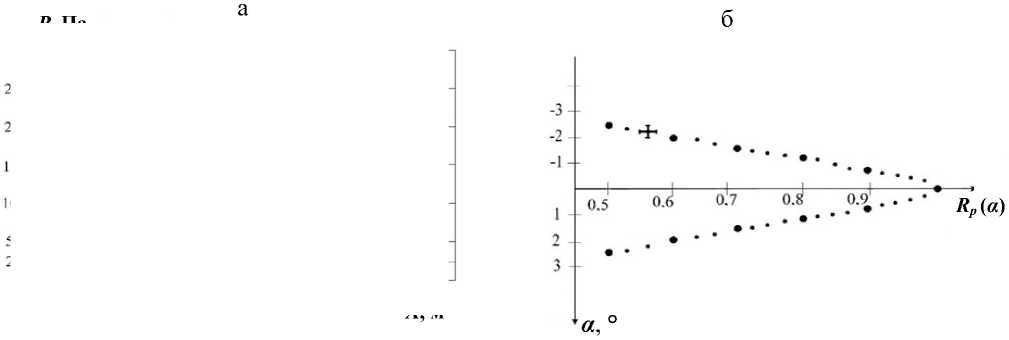
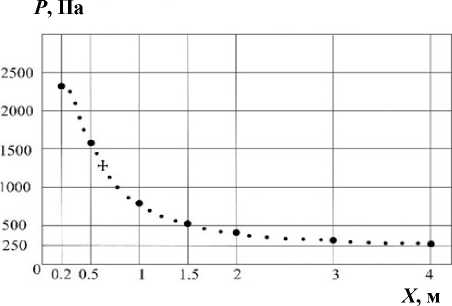
Рис. 3. Экспериментальные осевое (а) и угловое нормированное (б) распределения амплитуд звукового давления для ПИА, генерирующей в водной среде УЗ-сигнал ВРЧ F - = | f 2 - f J = 150 кГц
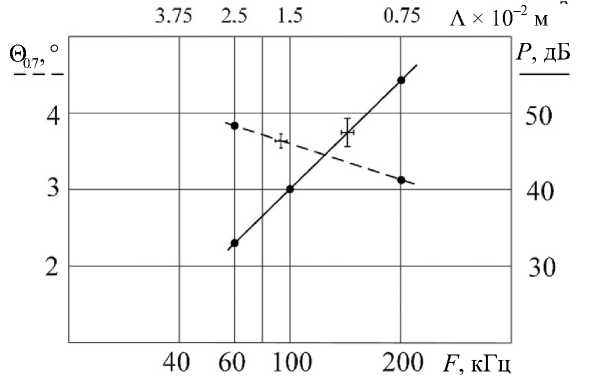
Рис. 4. Объединенные зависимости ПИА как средства измерения в водной среде.
-
- - - угловая ширина основного лепестка
ХН ( левая вертикальная ось 0 0 7 , ° );
____ амплитуда звукового давления ВРЧ (правая вертикальная ось P , дБ, относительно 1 Па, приведенная к расстоянию 1 м).
Графики даны для диапазона частот (кГц) / длин волн (м) ВРЧ (нижняя/верхняя горизонтальная ось соответственно)
пьезоэлемента в корпусе ЭАП 4. Начиная с расстояния 1 м, амплитуда звукового давления ВРЧ плавно убывает по закону сферического распространения, сигнал ВРЧ сформирован и может быть использован для измерений, т.е. облучения пластины-отражателя 10.
-
2) Ширина пучка на ВРЧ соответствует расчетному значению в ХН по давлению R p ( а ) , на ВРЧ отсутствуют боковые лепестки, угловая ширина основного лепестка ХН составляет для F – = 150 кГц ~ 3°, что также соответствует условиям проведения исследований по облучению пластины-отражателя 10.
-
3) Из рис. 4 видно, что для диапазона от 50 кГц (30 мм) до 200 кГц (7.5 мм) угловая ширина основного лепестка ХН ПИА на ВРЧ практически постоянна; эффективность процесса нелинейного взаимодействия, т.е. уровень генерируемой амплитуды звукового давления ВРЧ с ростом значения F – увеличивается.
Как отмечалось выше, расчетное взаимовлияние нелинейных и дифракционных эффектов на УЗ-поле накачки ЭАП 4 можно оценить с помощью параметра Хохлова N = lP /1Д, величина которого составила ~ 2.4; т.е. нелинейность сравнительно слаба. Расчетные значения p01,02 амплитуд звукового давления сигналов накачки у поверхности ЭАП 4 составляли около 0.075·105 Па для каждого. Теоретическое значение длины области взаимодействия сигналов накачки сопоставимо с максимальным размером водного объема бассейна и составляло около 5 м, определяясь как их частотой, так и свойствами водной среды распространения. Отметим, что представленные данные в целом следуют известным результатам, опубликованным в [21]. Таким образом, акустический тракт обладает необходимыми качествами, это: широкополосность зондирующего сигнала и постоянство площади облучения на модельной границе раздела, а также минимальность маскирующего влияния реверберации при измерениях в бассейне ограниченного объема, — что позволяет сделать вывод о возможности использования ПИА для проведения модельного эксперимента по изучению рассеяния УЗ на границе раздела с синусоидальным профилем неровностей.
Рассеяние пластиной-отражателем УЗ-поля ВРЧ, сформированного ПИА
В настоящее время модель и теория ПИА развита для условий эхопоиска объектов вблизи гладкой границы раздела вода-воздух [24, 25] с использованием метода мнимого источника. Его суть — влияние плоской границы раздела вода-воздух на рассеяние УЗ заменяют воздействием мнимого источника волн накачки с близкими частотами f 1 , f 2 , т.е. мнимой ПИА, фиксированное положение которой в воздушной среде определяют из законов геометрической оптики. Отраженные акустически мягкой невзволнованной границей вода-воздух волны накачки имеют дополнительный фазовый сдвиг на π радиан, в связи с чем считается, что мнимая ПИА генерирует в водной среде "противофазную" ВРЧ относительно ранее сформированного реальной ПИА (до отражения) сигнала. Исходя из этого, формирование ПИА "результирующего" сигнала ВРЧ при отражении от гладкой свободной поверхности представляют как результат наложения сигналов ВРЧ от двух ПИА, имеющих общую акустическую ось в водной среде, но излучающих противофазные волны накачки. Первую ПИА с ограниченной зоной взаимодействия образует ЭАП 4 и участок водной среды до гладкой отражающей границы. Вторая
ПИА представляет собой излучатель в виде участка гладкой границы раздела, отразившего волны накачки, и область воды, в которой далее распространяется пучок. Суперпозиция двух ПИА и образует УЗ-поле, в котором наблюдаются искажения плавности изменения амплитуды звукового давления ВРЧ как вдоль, так и поперек пучка: например, после отражения в поперечном распределении на акустической оси образуется минимум, величина которого увеличивается при удалении от границы раздела [24, 25].
В нашем случае граница раздела вода-воздух возмущена, поверхностная волна распространяется в направлении генерального бега со скоростью V, в результате чего в области облучения наклон профиля поверхностной волны относительно нормали периодически меняется. Это приводит к периодическому смещению вверх и вниз мнимой "воздушной" ПИА по нормали, которая ее соединяет с "подводной" ПИА. Это изменит процесс формирования результирующего УЗ-поля ВРЧ, в частности, за счет перемещения акустической оси мнимой "воздушной" ПИА "в такт" со смещением ее в вертикальной плоскости относительно неподвижной акустической оси "подводной" ПИА. Таким образом, взволнованная поверхность в те- чение периодов колебаний "перераспределяет" УЗ-энергию отраженной противофазной ВРЧ в пределах некоторого углового сектора, что может снизить степень искажения амплитудных характеристик результирующего сигнала в гидроакустическом канале. Непосредственные экспериментальные измерения таких "динамично-изме-няющихся" параметров УЗ-полей представляют определенные сложности, например, за счет необходимости применения трехмерных решеток из малоразмерных и однотипных гидрофонов. В этой связи целесообразным при проведении экспериментов является осуществление физического моделирования рассеяния УЗ-полей ВРЧ при различных значениях углов скольжения на статичной во времени и акустически мягкой пенопластовой пластине-отражателе с синусоидальным профилем неровностей.
Схематично геометрия эксперимента представлена на рис. 5. На рис. 5, а:
– волнистая линия в середине рисунка — синусоидальный профиль облучаемой грани пластины-отражателя 10 с длиной поверхностной волны λ пов и высотой неровностей h (вверху — штриховка пенопласта 10, внизу — штриховка воды 8);
М.И.
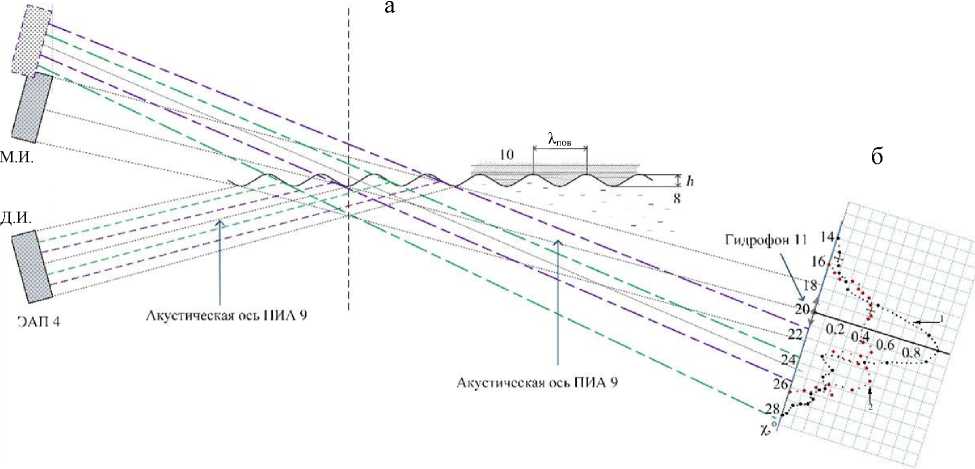
Рис. 5. Геометрия эксперимента по рис. 2, вид сверху (а), экспериментальные нормированные распределения амплитуд звуковых давлений ВРЧ для двух моделей неровностей (б).
На графиках (б): 1 — график для модели малых неровностей h / λ = 2 мм / 10.7 мм = 0.19, F_ = 140 кГц;
2 — график для модели больших неровностей h / λ = 20 мм / 7.5 мм = 2.7, F_ = 200 кГц;
χ — угол скольжения, χ 0 = 20° — угол облучения, М.И. — мнимый источник, Д.И. — действительный источник
– слева внизу — ЭАП 4 (действительный источник, Д.И.), формирующий реальную "подводную" ПИА 9;
– слева вверху — два ЭАП 4 (мнимые источники, М.И., нижний и верхний, рассеяние УЗ от горизонтальных и наклонных участков синусоидального профиля соответственно) "воздушных" ПИА, акустические оси которых пространственно разнесены.
На рис. 5, б, — две нормированные зависимости амплитуд звуковых давлений ВРЧ (графики 1 и 2 соответствуют различным значениям h / λ ), зарегистрированные экспериментально при перемещении гидрофона 11 поперек результирующего УЗ-поля, которое определяется наложением двух ВРЧ: зеркально отраженной (для реальной подводной ПИА 9, Д.И) и рассеянной (для мнимой "воздушной" ПИА, т.е. "противофазной" ПИА, М.И.).
Критерий акустической ровности взволнованной поверхности и физическое моделирование процессов рассеяния на акустически мягкой пенопластовой пластине-отражателе
Как уже отмечалось ранее, осуществление регулярного мониторинга водного объема прибрежной акватории и, в частности, взволнованной границы раздела вода-воздух, обусловливает необходимость разработки новых как технологий, так и приборов, в том числе с использованием эффектов нелинейной акустики. Очевидно, что можно выделить три режима широкополосного облучения УЗ-сигналами со стороны дна:
– обращенного моностатического эхолота [27];
– наклонного моностатического облучения [28];
– бистатического облучения, причем если в первых двух случаях излучатель и приемник УЗ находятся рядом, то в третьем — они разнесены в пространстве.
Как известно, пучок УЗ-волн, падая на любую неровную поверхность, от всех ее облучаемых точек отражается по законам геометрической акустики — угол падения равен углу отражения. Причем отраженные волны, суммируясь в точке наблюдения, образуют в соответствии с принципом суперпозиции УЗ-поле, характер которого будет зависеть от разности фаз Аф = = 4 п ( h / A )sin х элементарных волн, одновременно пришедших в рассматриваемую точку. Ниже обсудим соотношение для критерия акустической ровности поверхности моря, в соответствии с которым разность хода А r между лучами, отраженными от верхней и нижней границ поверхностных нерегулярностей, должна быть меньше λ /4 [20].
Рассмотрим два луча 1 и 3, падающие на неровную поверхность под углом θ (рис. 6) и найдем разность фаз между этими лучами после их отражения от различных точек поверхности. Проведем плоскость z = 0 и луч 3 перенесем в точку D , обозначив его 2. Поскольку разность фаз лучей 2 и 3 после отражения от плоскости z = 0 равна нулю, достаточно найти разность фаз между лучами 1 и 2. Разность хода между этими лучами А r равна:
„ h
А r = BC + CD = 2CD - AB, CD = ——, cos θ
AB = AD sin в = 2 h tg в sin в.
Следовательно,
2 h
Аr =--2h tg в sin в = 2h cos в, и разность фаз cosθ через угол скольжения: х = (90°- в),
А ф = k А r = 2 kh sin х . Видно, что при отражении УЗ от неровной поверхности важную роль имеет соотношение между длиной падающей УЗ волны λ и размерами неровностей h этой поверхности, а условие, при котором отражающая поверхность может считаться акустически ровной, т.е. отражающей зеркально, имеет вид [26]:
h / Л < 1/(8 sin х ).
Это и обусловило геометрию (рис. 5) проведения физического моделирования процессов рассеяния на акустически мягкой пенопластовой пластине-отражателе 10 с синусоидальным профилем неровностей, например, при бистатическом облучении.
Для проведения экспериментов были выбраны следующие пространственные характеристики пластин-отражателей 10: расстояние между максимумами (минимумами) на отражающей поверхности
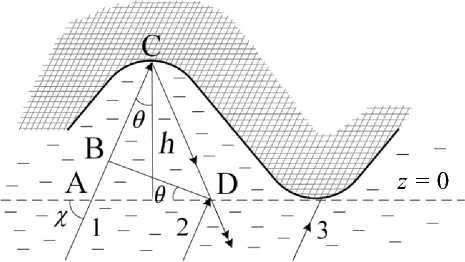
Рис. 6. К выводу соотношения для критерия акустической ровности взволнованной поверхности [26].
Штриховка: вверху — для пенопластовой пластины-отражателя 10, внизу — для воды 8
λ пов = 0.05 м при размахе (двойная амплитуда) h = 2 мм uh = 20 мм (рис. 5). Если учесть, что акустический тракт измерительной установки позволял осуществлять изменение ВРЧ в диапазоне длин волн Л от Л = 21.4 мм до Л = 7.5 мм, очевидно, что при небольших углах скольжения χ (до 30°) можно реализовать различные варианты облучения пластин-отражателей 10, попадающих в рамки моделей как малых (первый вариант), так и больших неровностей (второй вариант).
АНАЛИЗ РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА
Пенопластовая пластина-отражатель 10 с синусоидальным профилем неровностей на рабочей поверхности (рис. 2) расположена в гидроакустическом бассейне 5 в водной среде 8 и облучается ВРЧ от ПИА 9 под углом скольжения χ 0. Пластина закреплена в держателе, погружена в воду и находится в вертикальном положении за счет прикрепленных снизу грузов, имеет возможность фиксированного поворота относительно вертикальной оси с помощью ПВУ 7, находится на расстоянии около 1.4 м по акустической оси ПИА 9.
Следует отметить, что представленные на рис. 5, б, и рис. 7 экспериментальные результаты являются типичными в проведенных сериях, причем удобство их последующего сопоставительного анализа обусловлено использованием в измерениях одинаковой величины какого-либо параметра, например, угла облучения х 0 = 20°, но двух различных ВРЧ F - = 140 кГц и 200 кГц
(рис. 5, б) или ВРЧ F - = 180 кГц, но двух различных величин угла облучения х 0 = 30° и 16° (рис. 7).
Итак, из рис. 5, б, следует по графику 1 для модели малых неровностей ( h / Л= 2 мм/10.7 мм = 0.19;
F - = 140 кГц):
-
1) форма и угловая ширина основного лепестка ПИА 9 практически не изменились, направление основного лепестка на ВРЧ при отражении (~ 20°) подчиняется закономерности геометрической акустики, т.е. используемую модель малых неровностей можно считать акустически ровной и отражающей зеркально;
-
2) в секторе ~ 22°÷28° (направление акустической оси мнимой "противофазной" ПИА около 24°) наблюдается формирующаяся интерференционная картина для ВРЧ при средней нормированной амплитуде около 0.2;
-
3) "противофазность/сфазированность" данного сигнала ВРЧ относительно зеркально отраженной ВРЧ не установлена, т.к. в водной среде акустические оси обеих ПИА разнесены (~ 4°) в пространстве, однако можно отметить, что для направления ~ 23° наблюдается искажение известной зависимости динамики спада амплитуды ВРЧ для внеосевых направлений.
Из рис. 5, б, следует по графику 2 для модели больших неровностей ( h / Л = 20 мм / 7.5 мм = 2.7, F - = 200 кГц ):
-
1) основной лепесток ПИА 9 существенно изменен в результате рассеяния, в частности, изменились его амплитуда, форма и угловая ширина,
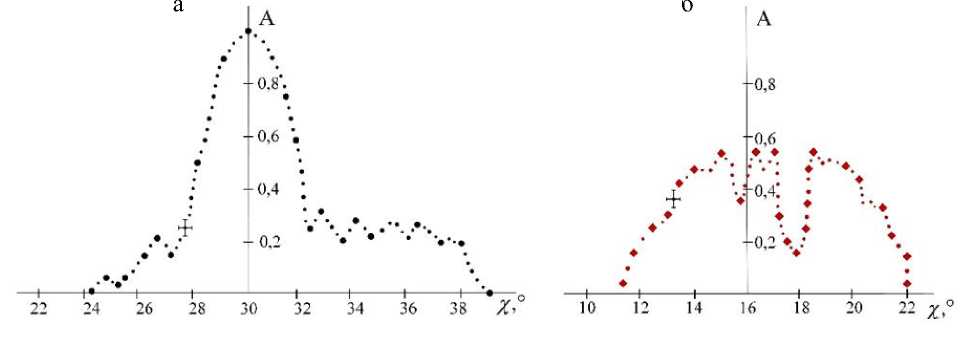
Рис. 7. Экспериментальные нормированные распределения амплитуд звуковых давлений ВРЧ для двух моделей неровностей при F – = 180 кГц.
а — модель малых неровностей: h / Λ = 2 мм / 8.3 мм = 0.23, χ 0 = 30°;
б — модель больших неровностей: h / Λ = 20 мм / 8.3 мм = 2.4, χ 0 = 16°
что можно объяснить расфазировкой ВРЧ от реальной "подводной" ПИА 9, т.е. используемую модель больших неровностей нельзя считать акустически ровной и отражающей зеркально;
-
2) в секторе ~ 16°÷26° (направление акустической оси мнимой "противофазной" ПИА около 24°) наблюдается интерференционная картина для ВРЧ при средней нормированной амплитуде около 0.5, в которой происходят значительные флюктуации;
-
3) можно предположить, что в водной среде акустические оси обеих ПИА разнесены в пространстве (~ 5°), причем видно, что при рассеянии УЗ данной моделью взаимное влияние "разнофазных" ВРЧ от обеих ПИА приводит к разрушению ПИА как самого инструмента исследования.
Из рис. 7, а, следует для модели малых неровностей ( h / Л = 2мм/8.3мм = 0.23, F - = 180 кГц , угол облучения х 0 = 30 ° ):
-
1) форма и угловая ширина основного лепестка ПИА 9 не изменились, направление основного лепестка на ВРЧ при отражении ( ~ 30°) подчиняется закономерности геометрической акустики, т.е. используемую модель малых неровностей можно считать акустически ровной и отражающей зеркально;
-
2) в секторе ~ 32°÷38° (направление акустической оси мнимой "противофазной" ПИА около 35°) наблюдается формирование интерференционной картины для ВРЧ при средней нормированной амплитуде около 0.2;
-
3) "противофазность/сфазированность" данного сигнала ВРЧ относительно зеркально отраженной ВРЧ не установлена, т.к. в водной среде акустические оси обеих ПИА разнесены в пространстве, однако можно отметить, что для направления ~ 32° наблюдается искажение известной зависимости динамики спада амплитуды ВРЧ для внеосевых направлений.
Из рис. 7, б, следует для модели больших неровностей ( h / Л = 20 мм/8.3мм = 2.4, F - = 180 кГц , угол облучения х 0 = 16 ° ):
-
1) основной лепесток ПИА 9 существенно изменен в результате рассеяния, в частности, изменились его амплитуда, форма и угловая ширина, что можно объяснить расфазировкой ВРЧ от реальной "подводной" ПИА 9, т.е. используемую модель больших неровностей нельзя считать акустически ровной и отражающей зеркально;
-
2) в секторе ~ 12°÷22° (направление акустической оси мнимой "противофазной" ПИА около 19°) наблюдается интерференционная картина для ВРЧ при средней нормированной амплитуде около 0.6, в которой имеются значительные флюктуации;
-
3) можно предположить, что в водной среде акустические оси обеих ПИА разнесены в пространстве (~ 5°), причем видно, что при рассеянии УЗ данной моделью взаимное влияние "разнофазных" ВРЧ от обеих ПИА приводит к разрушению ПИА как самого инструмента исследования.
Важно отметить, что при прочих равных условиях осуществления эксперимента применение модельной поверхности с большими размерами неровностей (20 мм) привело к "расфазировке" переотраженного УЗ-сигнала ВРЧ, который до отражения был сформирован (рис. 5, 7) ПИА. Таким образом, и для ВРЧ, генерируемой ПИА, справедлив вывод из [20]: переизлучаемое модельной поверхностью УЗ-поле состоит из двух компонент — регулярной, сформированной вблизи зеркального направления, и случайной, образующей рассеянное поле в нижней полусфере, причем их соотношение определяется соразмерностью длины волны УЗ и высоты h бегущей поверхностной волны.
ЗАКЛЮЧЕНИЕ
Анализ полученных результатов позволяет предложить новый способ измерения параметров взволнованной морской поверхности, например, для режима широкополосного бистатического облучения (излучатель и приемник разнесены в пространстве) УЗ-сигналами со стороны дна. Наиболее наглядно суть предложения можно увидеть из анализа рис. 5. Очевидно, что представленные на рис. 5 поперечные нормированные распределения имеют наглядные отличия друг от друга, причем если в эксперименте для модели больших неровностей использовать широкополосность излучения ПИА 9 и перестроить излучение ВРЧ на F-= 20.25 кГц, Л = 74.07 мм, то эксперимент можно перевести в режим модели малых неровностей. Данный прием — возможность подстройки длины волны зондирующего сигнала под характеристики имеющегося морского волнения при наличии регистрации пространственного распределения рассеянного УЗ-поля — дает основание предположить применимость гидроакустических систем с использованием режима параметрического излучения для изучения параметров взволнованной поверхности, в частности, косвенной оценки размеров неровностей h на ней. Следует отметить, что в [31] представлен анализ применения гидроакустических систем активной локации с приемоизлучающими антенными устройствами оригинальной конструкции, которые можно размещать на дне мелководной акватории и использовать как для излучения, так и регистрации распределения рассеянного поля ВРЧ, т.е. для получения информации о гидроусловиях в соответствии с предложенным способом. Недостатком ПИА с бигармонической накачкой является снижение эффективности генерации ВРЧ (рис. 4) при переходе в длинноволновый диапазон, соответствующий значениям параметров реального развитого морского волнения, однако в [32] рассмотрена возможность изменения эксплуатационных характеристик ПИА с многокомпонентным сигналом накачки, в частности, для повышения энергетического потенциала на формирующихся низкочастотных сигналах кратных частот при неизменной ширине основного лепестка характеристики направленности (ХН).
Тематика исследований, описанных в данной статье, является продолжением работ [27–32], и соответствует направлению исследований — разработка технических основ приборов, инструментов, систем и методов измерения в области акустики водных сред: излучение, прием и обработка звуковых сигналов, акустический мониторинг водоемов.
Автор благодарит к.т.н., доцента кафедры элек-трогидроакустической и медицинской техники Института нанотехнологий, электроники и приборостроения ЮФУ Волощенко Александра Петровича за инициативную помощь в постановке и проведении эксперимента, консультации по измерениям и анализу данных рассеяния.
Список литературы ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ РЕЖИМА ПАРАМЕТРИЧЕСКОГО ИЗЛУЧЕНИЯ
- 1. The Integrated Strategic Design Plan for the Coastal Ocean Observations Module of the Global Ocean Observing System. (Электронный ресурс). URL: https://unesdoc.unesco.org/ark:/48223/pf0000130523 (дата обращения 10.03.2024).
- 2. Воловов В.И., Краснобородько В.В., Лысанов Ю.П. Акустический способ определения высоты морских волн. Патент СССР N 412578 А1. 25.01.1974. URL: https://patentdb.ru/patent/412578
- 3. Молебный В.В. Измеритель направления морских волн. Патент СССР SU419826 А1. 15.03.1974. URL: https://patents.su/2-419826-izmeritel-napravleniyamorskikh-voln.html
- 4. Балакин Р.А., Тимец В.М. Гидроакустический автономный волнограф. Патент РФ RU2011132211 А. 10.02.2011. URL: https://patents.google.com/patent/RU2011132211A/ru
- 5. Греков А.Н., Васильев Д.М., Котов М.Н. Акустический измеритель параметров волн // Системы контроля окружающей среды. Севастополь, 2006. С. 51–56. URL:https://msoe.ru/articles/2006/09-05/
- 6. Богородский В.В., Яковлев Г.В., Корепин Е.А., Должиков А.К. Гидроакустическая техника исследования и освоения океана. Л.: Гидрометеоиздат, 1984. 263 с.
- 7. Fissel D.B., Birch J.R., Borg K., Melling H. Wave measurements using upward-looking sonar for continental shelf application // Proc. Offshore Technology Conference, Houston, TX, USA, 3–6 May 1999. DOI; 10.4043/10794-MS
- 8. Strong B.S. System and method for determining wave characteristics from a moving platform. Патент США
- US 2010302908 A1. 02.12.2010.
- 9. Deines A. Broadband acoustic doppler current profiler. Патент США US 5615173. 25.03.1997.
- 10. System and method for measuring wave directional spectrum and wave height. Патент США US 6282151 B1. Rowe-Deines Instruments Incorporated. 28.08.2001.
- 11. Terray E.A., Brumley B.H., Strong B. Measuring waves and currents with an upward-looking ADCP // Proc. of the IEEE Sixth Working Conference on Current Measurement, 1999. P. 66–71. DOI: 10.1109/CCM.1999.755216
- 12. Keisuke A. Multifrequency ultrasonic transducer. Патент США US 4490640. 25.12.1984.
- 13. Transducer. Патент США US 4209766 A. 24.06.1980.
- 14. Акустический лаг Consilium SAL R1a. (Электронный ресурс). URL: https://zora.ru/?page_id=319 (дата обращения 10.03.2024г.). 15. Broadband acoustic transducer. Патент США US 5343443 A. 30.08.1994.
- 16. Teledyne RD Instruments. (Электронный ресурс). URL: https://datchiki.com/manufacturers/teledyne-rdinstruments-flagman-gidrologii/
- 17. Мюир Т.Дж. Нелинейная акустика и ее роль в геофизике морских осадков // Акустика морских осадков / Пер. с англ.; под ред. Ю.Ю. Житковского. М.: Мир, 1977. C. 227–273.
- 18. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. Л.: Судостроение, 1986. 272 с.
- 19. Бахвалов Н.С., Жилейкин Н.М., Заболотская Е.А. Нелинейная теория звуковых пучков. М.: Наука, 1982. 176 с.
- 20. Кудрявцев В.И. Промысловая гидроакустика и рыболокация. М.: Пищ. пром-сть, 1978. 312 с.
- 21. Новиков Б.К., Руденко О.В., Тимошенко В.И. Нелинейная гидроакустика. Л.: Судостроение, 1981. 264 с.
- 22. Блинова Л.П., Колесников А.Е., Ланганс Л.Б. Акустические измерения. М.: Изд-во стандартов, 1971. 271 с.
- 23. Заграй Н.П. Нелинейные взаимодействия в слоистых и неоднородных средах. Таганрог: Изд-во ТРТУ, 1998. 433 с.
- 24. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов н/Д:
- Ростиздат, 2004. 400 с.
- 25. Новиков Б.К., Тимошенко В.И. Параметрические антенны в гидролокации. Л.: Судостроение, 1989. 256 с.
- 26. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. 2-е изд., перераб. и доп. Л.: Судостроение, 1988. 288 с.
- 27. Волощенко В.Ю., Волощенко А.П., Волощенко Е.В. Акустический волнограф. Патент РФ RU168083 U1. 17.01.2017. URL: https://patents.google.com/patent/RU168083U1/ru
- 28. Волощенко Е.В., Тарасов С.П. и др. Акустический способ и устройство измерения параметров морского волнения. Патент РФ RU2721307 C1. 18.05.2020. URL: https://patents.google.com/patent/RU2721307C1/ru
- 29. Волощенко Е.В., Тарасов С.П. Измерение характеристик морского волнения на основе применения эффектов нелинейной акустики // Акустика среды обитания (АСО-2021): материалы Шестой Всероссийской конф. молодых ученых и спец. М.: МГТУ им. Баумана, 2021. С. 70–75. URL: http://mhts.ru/data/ckfiles/files/ASO2021_%D0%A1%D0%B1%D0%BE%D1%80%D0%BD%D0%B8%D0%BA_%D0%90%D0%A1%D0%9E-2021.pdf
- 30. Волощенко Е.В., Волощенко В.Ю. Многочастотный доплеровский способ измерений скорости течений в водной среде. Патент РФ RU2795579 С1. 05.05.2023. URL: https://patents.google.com/patent/RU2795579C1/ru
- 31. Волощенко Е.В. Повышение эффективности гидроакустических средств обнаружения на прибрежной акватории за счет применения нелинейной акустики // Научное приборостроение. 2024. Т. 34, № 2. С. 67–76. URL: http://iairas.ru/mag/2024/abst2.php#abst7
- 32. Волощенко Е.В. Параметрическая излучающая антенна с многокомпонентным сигналом накачки для гидроакустического мониторинга мелководных водоемов // Научное приборостроение. 2024. Т. 34, № 2, С. 102–111. URL: http://iairas.ru/mag/2024/abst2.php#abst10
