Первый опыт роботизированного эндопротезирования коленного сустава

Автор: Лычагин А.В., Рукин Я.А., Грицюк А.А., Елизаров М.П.
Журнал: Кафедра травматологии и ортопедии @jkto
Статья в выпуске: 4 (38), 2019 года.
Бесплатный доступ
Тотальное эндопротезирование коленного сустава (ТЭКС) является одной из самых эффективных и технологичных операций. На территории США ежегодно выполняется более 700 000 оперативных вмешательств, и количество их продолжает расти. Поэтому ТЭКС привлекает внимание со стороны множества производителей робототехнических хирургических систем (РТХС). Внедрение в ортопедию активных роботизированных установок позволяет создать индивидуальный хирургический план с учетом всех специфических анатомических особенностей пациента, а также обеспечить точность в работе хирурга и безопасность пациента, улучшить рентгенографические результаты и надежно корригировать механическую ось конечности, обеспечить высокие ожидаемые функциональные результаты и выживаемость имплантатов. Активная роботизированная хирургическая система (АРХС) обеспечивает выполнение полной автоматизированной резекции костей и формирование костного ложа протеза коленного сустава при помощи специального костного бора, также использует предоперационное КТ-планирование и интраоперационную регистрацию, однако резекция происходит в полном автоматическом режиме под визуальным (хирурга) и компьютерным контролем.В данной статье мы демонстрируем наш опыт первого применения активной роботизированной хирургической системы при первичном тотальном эндопротезировании коленного сустава на территории РФ...
Активная роботизированная хирургическая система, тотальное эндопротезирование коленного сустава, робототехника в ортопедии
Короткий адрес: https://sciup.org/142224483
IDR: 142224483 | УДК: 617.3 | DOI: 10.17238/issn2226-2016.2019.4.27-33
First experience of using an active robotic surgical system in total knee arthroplasty
Total knee arthroplasty (TKA) is one of the most effective and technologically operations. In the United States, more than 700,000 surgical and their number continues to grow. Therefore, TKA attracts the attention of many manufacturers of robotic surgical systems (RSS). The introduction of active robotic installations into orthopedics allows you to create an individual surgical plan taking into account all the specific anatomical features of the patient, as well as ensure the accuracy of the surgeon and patient safety, improve radiographic results and reliably correct the mechanical axis of the limb, ensure high expected functional results and implant survival. The Active Robotic Surgical System (ARSS) provides complete automated bone resection and bone formation of the prosthesis of the knee joint using a special bone boron; it also uses preoperative CT planning and intraoperative registration, however, the resection takes place in full automatic mode under the visual (surgeon) and computer control.In this article, we demonstrate our experience of the first use of an active robotic surgical system for total knee replacement in the Russian Federation. We describe the features of patient selection, preoperative planning, the use of a robotic system intraoperatively, the management of patients in the postoperative period.
Текст научной статьи Первый опыт роботизированного эндопротезирования коленного сустава
Тотальное эндопротезирование коленного сустава (ТЭКС) является одной из самых эффективных и технологичных операций не только в ортопедии, тем более что только в США ежегодно выполняется более 700 000 оперативных вмешательств и количество их продолжает расти [1]. Поэтому ТЭКС привлекает внимание со стороны множества производителей робототехнических хирургических систем (РТХС). Различные современные РТХС, применяемые в ортопедии, включают в себя роботизированную руку, роботизированные режущие приспособления и роботизированные фрезерные системы с разнообразными стратегиями навигации с использованием активных, полуавтоматических или пассивных систем управления, которые позволяют уменьшить частоту возможных ошибок и повысить точность позиционирования компонентов. С момента внедрения робототехнических технологий в ортопедическую хирургию, они подверглись заметному развитию, первоначально они использовались для выполнения и решения вопросов компьютерного предоперационного планирования и интраоперационной навигации, а также других частных задач [2]. Внедрение в робототехническую ортопедию тактильных систем обратной связи, позволили применить их при эндопротезировании суставов нижних конечностей в активном варианте применения без участия хирурга-ортопеда. РТХС позволяют создать индивидуальный хирургический план с учетом всех специфических анатомических особенностей пациента, а также обеспечить точность в работе хирурга и безопасность пациента, улучшить рентгенографические результаты и надежно корригировать механическую ось конечности, обеспечить высокие ожидаемые функциональные результаты и выживаемость имплантатов [3]. Активная роботизированная хирургическая система (АРХС) обеспечивает выполнение полной автоматизированной резекции костей и формирование костного ложа протеза коленного сустава при помощи специального костного бора, также использует предоперационное КТ-планирование и интраоперационную регистрацию, однако резекция происходит в полном автоматическом режиме под визуальным (хирурга) и компьютерном контроле, данная система (см. Рисунок 1) сегодня прошла процесс клинической апробации в США, получено разрешение на ее применения [4].

Рис. 1: Роботизированная хирургическая (ортопедическая) система состоит из рабочей станция трехмерного планирования (РСТП) и компьютеризованного роботизированного режущего устройства (КРРУ)
Роботизированная хирургическая (ортопедическая) система помогает хирургам в планировании и проведении ортопедических операций, а именно - осуществлять полную замену суставов. Система включает в себя два основных компонента:
-
• рабочая станция трехмерного планирования (РСТП) обрабатывает данные компьютерной томографии пациента (КТ) и дает возможность хирургу, посредством данного технического устройства, разработать предоперационный план, который включает в себя расчет осей коленного сустава и выбор линии резекции бедренной и большеберцовой костей с учетом индивидуальных анатомических особенностей пациента, подбор и позиционирование имплантатов, все это сохраняется на компакт-диске и передается на компьютерное роботизированное режущее устройство (КРРУ).
-
• компьютеризованное роботизированное режущее устройство (КРРУ) представляет собой активную автоматизированную систему фрезерования, которая, используя информацию из предоперационного плана (РСТП), выполняет формирование полости и поверхностей сустава для размещения протеза с заданным позиционированием, при визуальном контроле хирурга.
Работа хирургической системы имеет три фазы (см. Рисунок 2):
-
1. Предоперационное планирование начинается с подробного КТ оперируемого сустава и всей нижней конечности пациента, для определения размеров и «качества» кости, точного определения оси конечности и различных деформаций. Результаты КТ обеспечивают информацию для предоперационного планирования на рабочей станции (РСТП).
-
2. Создание трехмерного (3D) виртуального образа сустава пациента, который выполняет хирург, используя трехмерную планировочную рабочую станцию (РСТП) для преобразования данных КТ. Хирург выбирает имплантат, определяет оптимальное размещение и выравнивание, и создает предоперационный план.
-
3. На основе персонализированного предоперационного плана пациента хирург использует компьютеризованного робота (КРУ) для выполнения резекции кости и ее подготовки для размещения протеза коленного сустава. Когда данный этап пройден, роботизированная хирургическая (ортопедическая) система включается и под визуальным контролем хирурга-ортопеда выполняет костные опилы бедренной и большеберцовой костей с высокой точностью. После чего ортопеду остается примерить и проверить работу искусственного сустава, окончательно имплантировать эндопротез и закрыть рану.

Рис. 2: Схема этапов работы роботизированной хирургической (ортопедической) системы
Клинический пример: пациент С., 63 лет, диагноз: идиопатический правосторонний гонартроз 3-4 ст., варусная деформация коленного сустава. Вид пациента, функция сустава и рентгенограммы представлены на рисунках 3-5 (см. Рисунок 3,4,5).
Пациент госпитализирован после амбулаторного обследования согласно принятого в клинике протокола, осмотрен лечащим врачом и терапевтов, противопоказаний к оперативному лечению не выявлено. С больным проведена беседа предложе- но роботизированное эндопротезирование коленного сустава, разъяснены необходимые вопросы и получено информированное согласие. Далее выполняется компьютерная томография нижних конечностей с захватом тазобедренных и голеностопных суставов в положении 175 градусов сгибания в коленных суставах с фиксированным калибровочным стержнем (см. Рисунок 5).

Рис. 3 : Вид пациента и функция конечности до операции

Рис. 4 : Рентгенограммы коленного сустава и топограмма

Рис. 5 : Вид конечностей пациента при компьютерной томографии с калибровочным стержнем отображение данных на мониторе компьютерного томографа
Пациент при этом не должен двигаться, обязательно на всех срезах томограммы в заданной позиции должен быть виден калибровочный стержень, что обязательно контролируется на экране компьютерного томографа и только после этого выполняются срезы конечности с шагом 2 мм. После сканирования на мониторе проверяется качество томограмм всем заданным условиям планирования, после чего данные записываются на индивидуальный лазерный диск, который после записи маркируется (Ф. И. О. пациента, идентификационный номер, сторона операции и дата исследования). Запись данных другого пациента или любой другой информации запрещается, использование томограмм давностью более одного месяца для планирования операций запрещается.
После этого диск с данными компьютерной томографии загружается в компьютерную установку TPLAN (см. Рисунок 6) и начинается процесс планирования операции. В процессе планирования на первом этапе обрабатываются все срезу компьютерной томограммы (около 1000 шт.) на каждом из которых определяется контур среза бедренной и большеберцовой костей, на основании которого на втором этапе планирования строится виртуальная модель конечности пациента.

Рис. 6 : Фотографии с экрана моноблока TPLAN`a, при планировании операции
Далее на третьем этапе планирования в данную виртуальную модель «имплантируется» виртуальный эндопротез коленного сустава, определятся все необходимые оси и уровни резекции, которые можно изменять в любой плоскости, до достижения положения протеза, удовлетворяющего требованиям производителя, знаниям и опыту хирурга. На данном этапе возможны консультации и внесения любых приемлемых изменений плана операции и типа протеза (см. Рисунок 7).

Рис. 7 : Фотографии с экрана моноблока TPLAN`a, готовый план операции с виртуальной подгонкой планируемого протеза
При достижении необходимых параметров план утверждается хирургом и записывается на отдельный индивидуальный лазерный диск, который после записи маркируется (Ф. И. О. пациента, идентификационный номер, сторона операции и дата планирования). Запись данных другого пациента или любой другой информации запрещается, использование данных планирования давностью более одного месяца для операций запрещается.
После записи диска и обязательного его дублирования, для обеспечения безопасности пациента, этап планирования заканчивается. Пациента консультирует анестезиолог и проводится стандартный протокол предоперационной подготовки пациента.
Перед проведением операции проводится поверка и калибровка всех систем робота в операционном зале инженером-робототехником и подготовка его к работе. При отсутствии каких-либо проблем планирования, пациента подают в операционную, выполняют анестезию (как правило спинальную с внутривенной седацией), конечность в стерильном виде фиксируют в специальном держателе (см. Рисунок 8), прочно фиксированном к операционному столу.

Рис. 8 : Вид коленного сустава перед операцией, конечность фиксирована в специальном держателе, выполнен медиальный парапателлярный доступ к коленному суставу
После чего выполняют продольный медиальный парапател-лярный доступ к коленному суставу с вывихом надколенника кнаружи, при этом удалять остеосифты на бедренной и большеберцовой кости запрещается. Жгут не используют, гемостаз выполняют электрохирургическим инструментом. Далее приступают к фиксации робота к конечности пациента специальными трансоссальными фиксаторами (см. Рисунок 9), и приступают к процессу регистрации робота. Данный процесс представляет из себя регистрацию и совмещение точек компьютерной томографии и соответствующего виртуального прототипа бедренной и большеберцовой костей, которые были созданы при планировании операции. После этого робот начинает «видеть» перед собой реальную кость.

Рис. 9 : Вид операционного поля после фиксации робота к конечности и в процессе регистрации
Для удобства выполнения данной процедуры, на экране монитора робота, весь процесс регистрации протекает в реальном режиме времени и пространстве (см. Рисунок 10), Программа построена таким образом, что пропустить или неправильно обозначить данные ориентиры невозможно, робот будет требовать точного выполнения всех маркировочных дествий до их завершения, при каких-либо неточностях, сбоях, движении пациента или конечности, данные будут зафиксированы, проана-лизрованы и при сдвигах более 1 мм, система остановит процесс и потребует повторной регистрации.
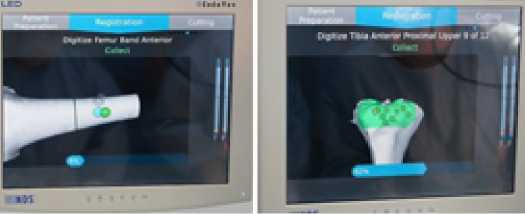
Рис. 10 : Вид мониторов TCAT`a при регистрации бедренной и большеберцовой костей коленного сустава
Только после правильного проведения процесса регистрации система будет готова для начала работы режущих элементов робота. После этого запускается этап резекции бедренной и большеберцовой костей коленного сустава строго в соответствии с предоперационным планом (см. Рисунок 11).
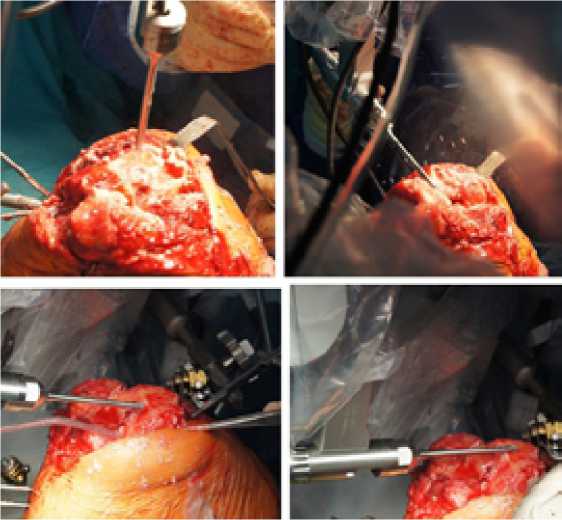
Рис. 11 : Вид операционного поля при работе робота, резекция бедренной кости
Фреза роботизированной хирургической системы двигается с высокой точностью и скоростью вращения до 8000 оборотов в минуту, поэтому требуется система постоянной ирригации физиологического раствора для охлаждения кости и режущего элемента системы. В процессе резекции кости роботизированная система ведет постоянный контроль положения бедренной и большеберцовой костей, при смещениях которых более 1 мм работа робота останавливается и проводится калибровка системы повторно. При этом оперирующий хирург следит за работой робота и при малейших возможных ошибках или неточностях имеет возможность экстренно остановить процесс, разобраться и устранить проблему. При невозможности продолжить корректную работу роботизированной системы (сдвиг, неустранимая потеря ориентиров или любая другая причина), хирург перейдет к ручной технике операции и обеспечит правильность эндопротезирования коленного сустава (см. Рисунок 12).

Рис. 12 : Хирургическая бригада (хирург, ассистент хирурга и операционная сестра) при работе робота
После окончания работы хирургического робота и незначительной доработки костных опилов (краевые заусенцы снимаются хирургическим рашпилем) коленной сустав готов к следующем этапу – примерке протеза и балансировке связочного аппарата (см. Рисунок 13).
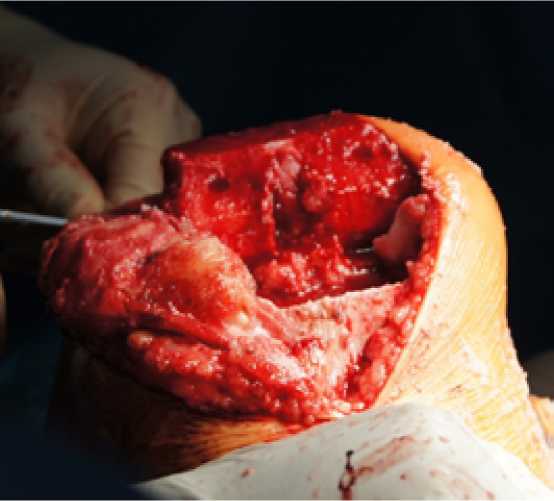
Рис. 13 : Интраоперационный вид коленного сустава после окончания работы робота
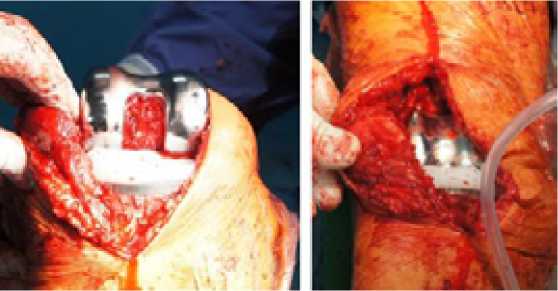
Рис. 14: Вид операционной раны после имплантации протеза коленного сустава
В послеоперационном периоде проводится лечение, направленное на заживление раны и раннюю реабилитацию коленного сустава, на 2-3 сутки выполняем контрольную рентгенографию и после восстановления полного объема движений на 7-12 сутки топограмму нижних конечностей (см. Рисунок 15). При контрольных измерениях четко определяется полное совпадение с планом операции.

Рис. 15 : Рентгенограммы и топограммы после операции роботизированного эндопротезирования коленного сустава
В настоящее время мы проводим стандартный протокол послеоперационного ведения пациента после роботизированного эндопротезирования коленного сустава (см. Рисунки 16-17), как рекомендует производитель системы, однако в процессе накопления опыта мы думаем, что роботизированное эндопротезирование коленного сустава покажет свои преимущества.
На данном этапе работа робота выполнена и его отсоединяют от пациента. Этап примерки и балансировки протеза коленного сустава является типичным, как и при традиционной технике операции, после чего выполняют цементную имплантацию протеза (см. Рисунок 14) и ушивание раны.

Рис. 16: Вид послеоперационной раны на 6 сутки

Рис. 17: Вид пациента и функция конечности на 6 сутки после операции
Таким образом хирургическое лечение тяжелых форм артроза коленного сустава выходит на первое место по количеству операций эндопротезирования, основной проблемой которых является точность планирования и позиционирования протеза, а также выполнение резекции бедренной и большеберцовой костей. Развивающаяся в настоящее время быстрыми темпами робототехника, может помочь решить эти актуальные проблемы. Внедряемые активные роботизированные хирургические системы позволяют надежно и безопасно исключить «человеческий фактор», что обеспечивает высокое качество выполняемых ТЭКС.
Лычагин А.В., Рукин Я.А., Грицюк А.А., Елизаров М.П., Первый опыт роботизированного эндопротезирования коленного сустава// Кафедра травматологии и ортопедии. .№(-8042). 27 с.-[Lychagin A.V., Rukin Y.A., Gritsyuk A.A., Elizarov M.P., first experience of using an Active Robotic Surgical System in total knee arthroplasty// Department of Traumatology and Orthopedics. .№( ). 27 p. ]
Финансирование: исследование не имело спонсорской поддержки
Funding: the study had no sponsorship
Список литературы Первый опыт роботизированного эндопротезирования коленного сустава
- Kurtz S., Ong K., Lau E., et al. Projections of primary and revision hip and knee arthroplasty in the United States from 2005 to 2030. J. Bone Joint Surg. Am. 2007; 89: 780-785. DOI: 10.2106/JBJS.F.00222
- Van der List J.P., Chawla H., Joskowicz L. et al. Current state of computer navigation and robotics in unicompartmental and total knee arthroplasty: a systematic review with metanalysis. Knee Surgery, Sport. Traumatol. Arthrosc. 2016; 24:3482-3495. DOI: 10.1007/s00167-016-4305-9
- Jacofsky D.J., Allen M. Robotics in Arthroplasty: A Comprehensive Review. J. Arthroplasty. 2016; 31: 2353-2363 ** Comprehensive review on robotic in arthroplasty. DOI: 10.1016/j.arth.2016.05.026
- Liow M.H.L., Goh G.S-H., Wong M.K. et al. Robotic-assisted total knee arthroplasty may lead to improvement in quality-of-life measures: a 2-year follow-up of a prospective randomized trial. Knee Surg. Sports Traumatol. Arthrosc. 2017. 25:2942-2951. DOI: 10.1007/s00167-016-4076-3
