Пешеходный радиационный монитор с функцией обнаружения металлических предметов

Автор: Федяев Сергей Леонидович, Миткевич Владимир Станиславович, Федяев Леонид Сергеевич, Рудниченко Валерий Александрович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 2, 2012 года.
Бесплатный доступ
•В статье рассмотрены пешеходные радиационные мониторы в качестве средства радиационного контроля. Представлен пешеходный радиационный монитор с функцией обнаружения металлических предметов. Приведены результаты теоретических и экспериментальных исследований. Подтверждена высокая эффективность применения подобных радиационных мониторов на контрольно-пропускных пунктах для обнаружения перемещения радиоактивных материалов через контролируемую зону.
Радиационный контроль, радиоактивные материалы, пешеходный радиационный монитор с функцией обнаружения металлических предметов
Короткий адрес: https://sciup.org/14967087
IDR: 14967087
Текст научной статьи Пешеходный радиационный монитор с функцией обнаружения металлических предметов
П ешеходные радиационные мониторы (РМ) – это один из видов оборудования радиационного контроля. Они устанавливаются в местах прохода людей на контрольнопропускных пунктах (КПП) для обнаружения перемещения радиоактивных материалов (РАМ) через контролируемую зону путем регистрации ионизирующего (гамма или нейтронного) излучения РАМ.
Начало использования приборов радиационного контроля на КПП (50-е гг. ХХ века) было связано с задачей обеспечения безопасности на предприятиях ядерного цикла. В 70 – 80 гг. первые радиационные обнаружители на основе газоразрядных счетчиков начали применяться на АЭС. В 90-е гг. возросшая угроза несанкционированного распространения ядерных материалов и использования РАМ в террористических целях привела к расширению традиционной сферы радиационного контроля. Это потребовало создания новых видов оборудования, в первую очередь, стационарных пе- шеходных РМ, основанных на высокочувствительных радиационных детекторах. В целях упорядочения требований к таким изделиям был разработан ГОСТ Р 51635-2000 «Мониторы радиационные ядерных материалов». За последние 10 лет в России появилось порядка 7 моделей пешеходных РМ, эксплуатация которых позволила уточнить требования к тактике их применения.
Установлено [1], что для обеспечения требуемой сигнализационной надежности применение РМ должно предусматривать его использование совместно с металлообнаружи-телем (МО), так как только в этом случае можно предотвратить пронос РАМ, помещенных в защитный металлический контейнер (экран), поглощающий гамма-излучение. При этом для повышения эффективности контроля желательно, чтобы зоны обнаружения радиационного обнаружителя и МО пространственно совпадали. Отдельно выпускаемые промышленностью МО и РМ не допускают такого располо- жения в силу взаимного электромагнитного влияния и конструкционной несовместимости.
Пешеходный радиационный монитор с функцией обнаружения металлических предметов
В качестве предпочтительного технического решения предприятием «Дедал» был выбран принцип построения комбинированного радиационного обнаружителя, одновременно сочетающего в себе функции РМ и МО и обладающего благодаря этому более высокими потенциальными возможностями по обнаружению РАМ. Такой обнаружитель имеет следующие преимущества:
-
□ одновременность регистрации РАМ и металлических предметов в единой зоне обнаружения (ЗО), исключая возможность «обхода»;
-
□ обнаружение источников гамма-излучения, помещенных в металлические контейнеры;
-
□ возможность адаптации порога обнаружения МО в зависимости от уровня радиационного фона, что повышает эффективность функционирования монитора;
-
□ повышение пропускной способности, уменьшение занимаемой площади;
-
□ уменьшение стоимости оборудования и технического обслуживания;
-
□ улучшение эргономических условий работы обслуживающего персонала.
Основным функциональным узлом РМ является детектор гамма-излучения, его выбор основывался на обеспечении:
-
□ высокой чувствительности к гамма-излучению в диапазоне энергий 0,05…5 МэВ;
-
□ порога обнаружения не более: 0,30 г Pu-239 и/или 10 г U-235;
-
□ высоких показателей надежности;
-
□ стойкости к воздействию внешней среды;
-
□ сравнительно низкой стоимости.
В соответствии с этими условиями выбран пластический сцинтилляционный детектор гамма-излучения, структурная схема которого показана на рис. 1 . Детектор состоит из блока детектирования сцинтилляционного (БДС) и счетчика импульсов. В состав БДС входит сцинтиллятор, фотоэлектронный умножитель (ФЭУ), высоковольтный делитель и усилитель-дискриминатор; габаритные размеры БДС составляют 10×20×100 см.
Сцинтиллятор изготовлен из сцинтилляционной пластмассы в виде призмы (ФЭУ с высоковольтным делителем закреплен на его торце), заключен в светонепроницаемую оболочку и помещен в кожух БДС, который обеспечивает защиту от механических воздействий. В кожухе сделано рабочее окно для регистрации гамма-излучения. Гамма-излучение, регистрируемое сцинтиллятором, преобразуется в световые кванты, которые через торец попадают на фотокатод ФЭУ. Последний преобразует их в импульсы тока, поступающие на усилитель-дискриминатор для усиления и формирования сигналов напряжения – импульсов амплитудой 5 В и длительностью 1 мкс. Высоковольтный делитель обеспечивает рабочие напряжения ФЭУ. Выходной сигнал

Рис. 1. Структурная схема сцинтилляционного детектора гамма-излучения
Рис. 2. Пример реализации процесса ξ1(t) = ξ0(t) + ξИ(t)
детектора ξ(t) представляет поток отсчетов в виде количества импульсов, регистрируемых за равные, следующие друг за другом промежутки времени Δt . На рис. 2 показана типичная реализация полезного сигнала ξИ(t) на фоне шума ξ0(t) . Последний представляет собой стационарный пуассоновский процесс с «белой» спектральной плотностью мощности. Основной характеристикой шума на выходе БДС является интенсивность потока отсчетов λ0 ; при нормальных климатических условиях ее среднее значение, измеренное на 400 образцах БДС, составило 2500 ± 900 имп./с.
Полезный сигнал ξИ(t) образуется при перемещении источника гамма-излучения в зоне обнаружения РМ. При прямолинейном перемещении источника вдоль оси Х ( рис. 3 ) для определения интенсивности SИ(y,z,t) этого процесса получены аппроксимации:
-
S И ( У , z , t) = A ; • ^ ( У , z • t X (1)
где A – активность источника; η – эффективность детек- тирования радионуклида; Ω(y,z,t) – телесный угол, под которым видно рабочее окно БДС из точки с координатами (x, y, z); x = vt; v – скорость перемещения источника. Телесный угол равен:
Q ( y, z, t ) = Qo ( y, z ) q ( y , z ) ----=
( V ■ t ) 2 + q2 ( y, z )
-
= ^ о ( У , z ) ■ S ( У , z, t ), (2)
где Ω 0(y,z) – телесный угол, соответствующий середине зоны обнаружения ( x = 0 ), q(y,z) – характеристическая функция, S(y,z,t) – временная составляющая интенсивности S И (y,z,t) .
Было установлено [2], что для реализации требуемой ЗО необходимо четыре БДС, расположенных как показано на рис. 3 . Вероятность обнаружения РМ (по ГОСТ Р 516352000) определяется для траектории минимальной чувствительности, которая в данном случае имеет координаты y = 0,4 м, z = 1 м. Полученные из экспериментов значения характеристической функции q(y,z) приведены в табл. 1 .
Таблица 1. Значения функции q(y,z)
|
у , м |
z , м |
q |
у , м |
z , м |
q |
|
0 |
0,13 |
0 |
0,29 |
||
|
0,2 |
0,14 |
0,2 |
0,29 |
||
|
0,1 |
0,4 |
0,14 |
0,3 |
0,4 |
0,29 |
|
0,6 |
0,14 |
0,6 |
0,29 |
||
|
0,8 |
0,19 |
0,8 |
0,33 |
||
|
1,0 |
0,35 |
1,0 |
0,45 |
||
|
0 |
0,21 |
0 |
0,38 |
||
|
0,2 |
0,21 |
0,2 |
0,38 |
||
|
0,2 |
0,4 |
0,21 |
0,4 |
0,4 |
0,38 |
|
0,6 |
0,21 |
0,6 |
0,38 |
||
|
0,8 |
0,26 |
0,8 |
0,40 |
||
|
1,0 |
0,40 |
1,0 |
0,50 |
Сечение зоны обнаружения детектора;
(у = 0,4 м; z = 1 м) -траектория минимальной чувствительности
Рис. 3. Схема расположения детекторов в РМ
Проверка на адекватность выражений (1), (2) показала их хорошее согласование с экспериментальными данными, отклонения не превысили 5% ( рис. 4 ). По результатам исследования шума и полезных сигналов рассчитан оптимальный приемник РМ, его алгоритм обнаружения строился исходя из отношения правдоподобия. Процесс ξ(t) анализируется в скользящем временном окне (t – T, t) , где t – текущее время с интервалом дискретизации Δt , T = N ×Δ t – интервал времени наблюдения, N – объем выборки в течение времени наблюдения.
Если принять, что H0 – гипотеза об отсутствии сигнала, а H1 – конкурирующая гипотеза о его наличии, то соответст-
Рис. 4. Функции Ω0(y,z) и S(y,z,t), описывающие полезный сигнал

вующие распределения вероятностей имеют вид:
P {^(At,) = ni,i = 1,NIH0} =
VN (X0 -A Л n,
= П "-----, exP ( -X0 ■Ati) , i=1
где ni – количество отсчетов в Δti , λ1(t) = λ0 + SИ(y,z,t) .
Для оптимального приемника (ОП) получено решающее
правило
< C, принимается H0, > C, принимается H1,
1 N
T = 1
где
C = M o
порог обнаружителя,
M0 и D0 – математическое ожидание и дисперсия LN(t) при H0 , а r0” – значение второй производной в нуле от нормиро в анной автокорреляционной функции случайно г о процесса LN(t) , TЛ – время наработки на ложную тревог у .
С использованием (5) рассчитывается минимально детектируемая активность Amin = 4πλИ /(ηΩ0) и минимально детектируемая масс mmin = m уд Amn рад ион у клида, где mуд – удельная масса в единицах г/Бк, λИ – интенсивность потока отсчетов от источника.
Из (5) следует, что алгоритм оптимального приемника реализуется работой счетчика в виде «скользящего окна» длительностью T , причем его функционирование определяется видом функции SИ(y,z,t) , которая априорно неизвестна в силу неопределенности координат y и z траектории источника. В простейшем случае в (5) используется прямоугольная аппроксимация (ПА) сигнала SИ(y,z,t) , при этом алгоритм обработки упрощается:

Рис. 5. Зависимости минимально детектируемой массы U-235 от времени наблюдения
N
L. =-" П
N i
T i = 1
< C, принимается H0, > C, принимается H1.
Для алгоритмов ОП и ПА рассчитаны ( рис. 5 ) зависимости mmin радионуклида U-235 от времени наблюдения T при различных значениях скорости перемещения v для следующих значений параметров: y = 0,4 м; z = 1 м; λ0 = 2500 имп./с; Ω0 = 0,2 ср; η = 0,24 ; mуд = 1,26·10-5 г/Бк; при стандартных TЛ = 8 ч и вероятности обнаружения Р0 = 0,95 . Видно, что оптимальный приемник имеет лучшие характеристики по сравнению с алгоритмом типично применяемого скользящего прямоугольного окна. Для улучшения качества функционирования РМ предложен модифицированный алгоритм ОП,
дополненный процедурой оценки SИ(y,z,t) , основанной на вейвлет-фильтрации шума [3]. При этом удается снизить потери в обнаружительной способности по сравнению с алгоритмом ПА на 4…7 дБ.
Исследована [4] зависимость вероятности обнаружения источников гамма-излучения от толщины и материала металлического защитного экрана ( рис. 6, 7 ) в соответствии с кратностью ослабления излучения.
Для защитных контейнеров (ЗК) типовой формы ( рис. 8 ) получены значения обеспечиваемых ими кратностей ослабления в зависимости от их размеров и массы ( табл. 2 ). Определены минимальные массы контейнеров, использование которых приводит к снижению вероятности обнаружения ниже допустимого уровня (по ГОСТ Р 51635-2000).
В результате исследований получены значения нижней границы порога обнаружения металлообнаружителя, которые составляют 100 г для стальных и 10 г для свинцовых ЗК.

Рис. 6. Ослабление гамма-излучения металлическим защитным экраном (ЗЭ) (гамма-излучение U-235:
1 – свинцовый; 3 – стальной экран; гамма-излучение
Pu-239: 2 – свинцовый; 4 – стальной экран)
Рис. 7. Вероятность обнаружения источника гамма-излучения в зависимости от кратности ослабления (1, 2, 3, 4, 5, 6 – вероятность обнаружения при отсутствии ЗЭ соответственно 0,95; 0,90; 0,85; 0,80; 0,75; 0,50)
Построение МО осуществляется в соответствии с выработанными требованиями:
-
□ регистрация любых металлов — ферромагнитных и неферромагнитных;
-
□ электромагнитная совместимость с детектором гамма-излучения;
-
□ требуемый порог обнаружения: 10 г (свинец), 100 г (сталь);
-
□ геометрические размеры, приведенные в соответствие с размерами РМ, – 80×200×33 см;
-
□ помехоустойчивость к внешним промышленным электромагнитным полям.
Рис.8. Типовая форма защитного контейнера (L – толщина стенки)
Таблица 2. Массы контейнеров и обеспечиваемые ими кратности ослабления
|
Кратность ослабления |
Источник гамма-излучения U-235 |
Источник гамма-излучения Pu-239 |
||||||
|
Стальной ЗК |
Свинцовый ЗК |
Стальной ЗК |
Свинцовый ЗК |
|||||
|
L , мм |
М ЗК , г |
L , мм |
М ЗК , г |
L , мм |
М ЗК , г |
L , мм |
М ЗК , г |
|
|
1,1 |
1,7 |
30 |
0,2 |
4 |
2,8 |
55 |
0,4 |
9 |
|
1,2 |
3,6 |
75 |
0,4 |
9 |
5,7 |
140 |
0,8 |
19 |
|
1,3 |
5,5 |
135 |
0,6 |
14 |
8,5 |
265 |
1,2 |
29 |
|
1,4 |
7,2 |
200 |
0,8 |
19 |
11,2 |
425 |
1,6 |
40 |
|
1,5 |
8,4 |
260 |
1,0 |
24 |
14,0 |
630 |
2,0 |
52 |
|
1,6 |
9,6 |
320 |
1,2 |
29 |
15,6 |
770 |
2,4 |
65 |
|
1,7 |
10,2 |
360 |
1,4 |
34 |
17,2 |
940 |
2,8 |
78 |
|
1,8 |
10,8 |
395 |
1,6 |
40 |
18,8 |
1130 |
3,2 |
94 |
|
1,9 |
11,6 |
450 |
1,8 |
46 |
20,5 |
1350 |
3,7 |
110 |
|
2,0 |
12,0 |
475 |
2,0 |
52 |
22,0 |
1570 |
4,0 |
125 |

Руководствуясь указанными требованиями, выбран МО активного принципа действия с гармонической запиткой.
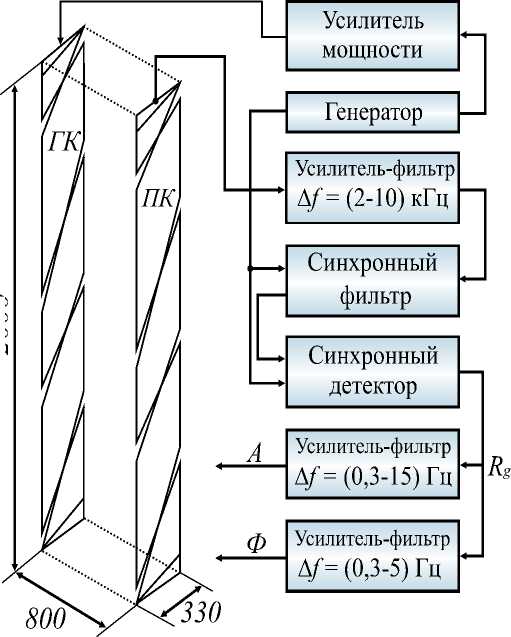
Рис. 9. Структурная схема МО
Выбор частоты запитки обусловлен тем, что глубина скин-слоя должна быть сравнима с толщиной стенки контейнера. С учетом приведенных выше результатов оптимальное значение частоты составляет f = 5 кГц.
Структурная схема МО показана на рис. 9 и включает: два индукционных контура – генераторный и приемный – и блок обработки. ЗО располагается между контурами. Задаваемый генератором переменный ток возбуждает в зоне первичное электромагнитное поле, при внесении металлического контейнера появляется вторичное поле, обусловленное вихревыми токами в предмете и его индукционным намагничиванием. В приемном контуре, в результате воздействия первичного и вторичного полей, образуется полезный сигнал, после обработки которого формируются две составляющие сигнала: синфазная А и квадратурная Ф . Конфигурация, геометрические и электрические параметры генераторного и приемного контуров в значительной степени определяют основные параметры МО: порог обнаружения, селективность, помехоустойчивость. В целях выбора предпочтительных вариантов построения комбинированного РМ разработана математическая модель сигналообразова-ния МО [5], позволяющая производить расчет параметров системы магниточувствительных элементов. Разработка модели осуществлялась для антенной системы, состоящей из плоских, параллельных друг другу генераторного (ГК) и приемного (ПК) индукционных контуров, которые представляются в виде последовательно соединенных прямолинейных участков ( рис. 10 ). При этом сделано допущение, что размеры ЗК, находящегося в точке T(x,y,z) , много меньше расстояния Zp между ГК и ПК.
Величина полезного сигнала, наводимого ЗК в i -м прямолинейном участке ПК, определяется как
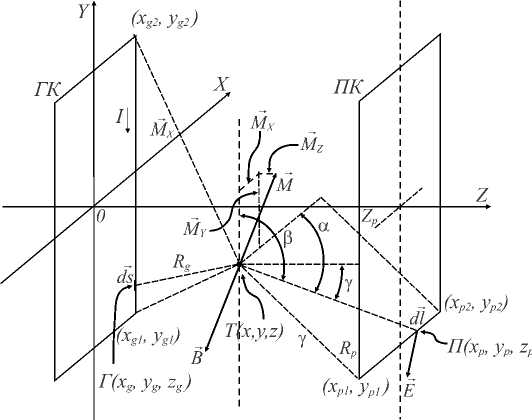
Рис. 10. К расчету антенной системы МО
-
8 i ( x , y, z ) = W p - J Edl, (7)
l *
где E – напряженность электрического поля, создаваемого контейнером на отрезке d l , расположенном в точке П(xp,yp,zp) i -го участка ПК; wp – количество витков ПК. Путем суммирования по i выражение (9) преобразуется к виду
8 ( x , y , z ) = K m - W x - U x + W y - U y + W - U) ), (8)
где ε(x,y,z) – величина полезного сигнала, наводимого металлическим предметом в ПК; KM – коэффициент, характеризующий его магнитный момент M (не зависящий от геометрических параметров ГК и ПК); W и U – коэффициенты, определяемые геометрическими параметрами ГК и ПК соответственно. При этом
N g N p
W = y ( W )., U = V ( U )
-
x, У, z x, У, z i , x, У, z x, y, z i ,
-
i = 1 i = 1
где Ng и Np – количество прямолинейных участков ГК и ПК соответственно (на рис. 10 Ng = Np = 4 ). Величины Wx , Wy , Wz для i -го участка ГК равны:
Jf =Q. z.. yg2 yg1- • xi I 7 7 ;
-
g Gg+ + G22
W yi = G - - ■
x - x g2 . ;
1G2 + G22
W -i = ( - 1 ) m ■

G ■
g
где параметры G , G1 , G2 , g , m вычисляются исходя из геометрии ЗО и траектории перемещения ЗК.
При вычислении Ux , Uy , Uz для i -го участка ПК определено, что
U. = ix
2 ( Z p - z ) x 2Pi y p i + Q i
PR. - Q ( V p^i +Qy p l+R
2P1yp2+Q1
V Р 1 У р2 +Q .+R1,
u. = iy
2 ( Z P —Z )j 2P 2 X p1 +Q 2 2P 2 X p2 +Q 2
1 x i-
4P2R2-Q2 ( J- +Q- +R Pp2xp2QQ2xp2^R2 J
u. =u ( 1 (+и{2 2 , 12 IZ 1Z ,
U i ( z 1) =
2P2 x Q 2 x p2 +2R 2 Q 2 x p1 +2R 2
4P 2 R 2 — Q22 [ V P 2 X P2 +Q 2 X P2 +R 2 J P 2 X pi +Q 2 X p1 +R 2
)
7
r
2 ( q 2 -y ) 2P 2 x p2 +Q 2 2P 2 x p1 +Q 2
X —
4P 2 R 2 -Q 2 ( >2 X2 p2 +Q 2 X p2 +R 2 p 2’ - Q? p ' R
(2) iz
2P 1 J Q i y p 2+2R 1 Q i y pi +2R 1
X -~ i~4P 1 R 1 -Q 1 ( 2]pyP 2 +Q i y p2 +R i Pp1P'plQ ( y p'+RR1
2 ( q i - x ) X f 2P 1 P p2 +Q 1 - 2P 1 P pi +Q 1
4P 1 R 1 -Q 1 [ V P 1 P p2 +Q 1 P p2 +R 1 P 1 P p1 +Q 1 P p1 +R 1
где параметры P1 , R1 , Q1 , P2 , R2 , Q2 , p1 , p2 , q1 , q2 также вычисляются исходя из геометрии ЗО и траектории перемещения ЗК. На основании (7) – (14) рассчитывается коэффициент неоднородности ЗО и оценивается вклад геометрических параметров и конфигурации контуров ГК и ПК в общую чувствительность МО. По значениям ε(x,y,z) согласно (8) определяется двумерная функция 8Д ( y, z ) = max | £ ( x , y, z ) |. Коэффициент неоднородности равен
K H = max eA ( y , z )/min 8 a ( y , z ). (15) y , z / y , z
Аналогично рассчитываются коэффициенты неоднородности KHX , KHY и KHZ отдельно по каждой составляющей εx , εy и εz функции ε(x,y,z) . Они обуславливают неоднородность ЗО для предметов вытянутой формы, ориентированных своим преобладающим размером вдоль соответствующих координатных осей X , Y , Z . В табл. 3 приведены рассчитанные по (15) значения KH для трех вариантов конфигурации ГК и ПК при изменении ширины контура LK и зоны обнаружения Zp . Разработанная математическая модель металлообнаружи-теля согласно (7) – (15) позволяет рассчитать и оптимизировать основные параметры ЗО в зависимости от конструктивных характеристик антенной системы. Тем самым
Таблица 3. Значения коэффициента KH
, (10)
Конфигурация
ГК и ПК (высота 2 м)
Z p , м
L K , м
0,2
0,4
0,8
1,0
Количество перекрестий К П = 3
0,8
11,6
4,9
4,7
5,1
1,0
13,1
5,8
4,6
4,4
1,5
34,7
14,0
7,4
6,5
Количество перекрестий К П = 4
0,8
13,6
4,9
3,6
3,5
1,0
16,2
7,2
4,1
3,4
1,5
117,2
54,2
53,3
53,0
Количество перекрестий К П = 5
0,8
9,7
4,6
2,9
2,5
1,0
20,3
8,2
6,2
6,5
1,5
235,1
154,4
158,3
144,6
обеспечивается возможность построения МО, в наилучшей степени удовлетворяющего предъявляемым требованиям. При совместном использовании РМ и МО общая вероятность обнаружения Р0 равна:
P 0 = P PM + P MO – P PM × P MO ,
где PPM – вероятность обнаружения РМ, PMO – вероятность обнаружения МО.
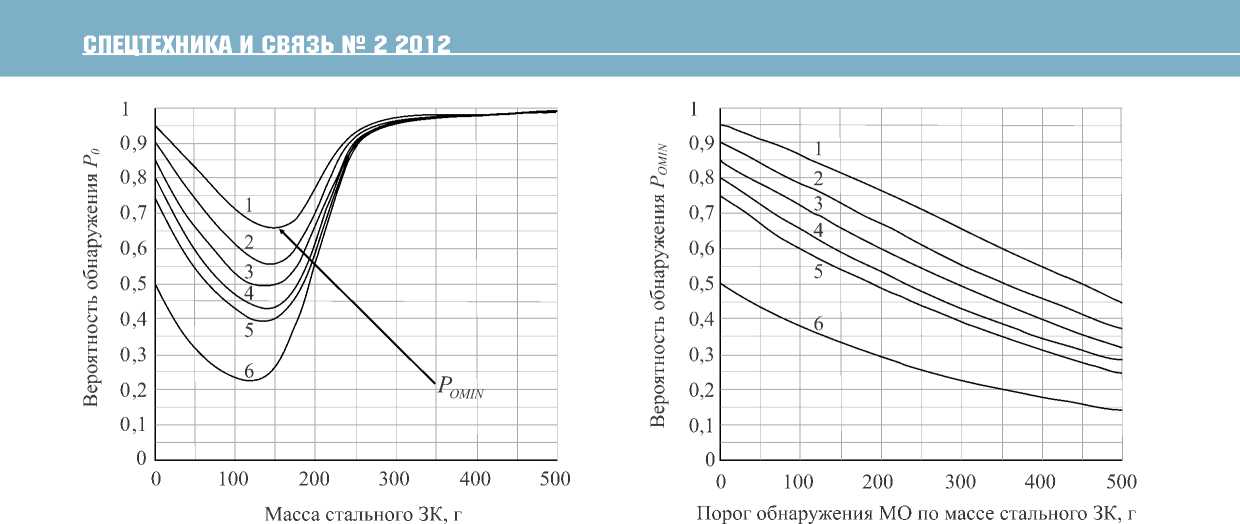
В зависимости от массы контейнера вероятность P0 изменяется в пределах от PPM (контейнер отсутствует) до ≈1 (масса контейнера > пороговой массы МО). В этом интервале функция P0 имеет явно выраженный минимум PОMIN , положение которого зависит от начальной вероятности PРМ (при отсутствии ЗК) и порога обнаружения МО. На рис. 11 показаны зависимости вероятности Р0 и Р0MIN от порога обнаружения МО в виде массы стального защитного контейнера. Величина PОMIN является показателем качества функционирования комбинированного обнаружителя.
Исследована возможность обнаружения РАМ у подготовленного нарушителя, применяющего ухищренный способ проноса, при котором радиоактивный объект перемещается в металлическом защитном контейнере и одновременно искусственно повышается уровень радиационного фона. В этом случае для эффективного обнаружения необходима автоматическая регулировка порога ПМО обнаружения МО, а выражение для вычисления требуемого порога имеет вид [6]:
ПМО=1+1×
u AM 9
( ^xln 1-
1-2×P0PPM 1-P PM
npu
0 PM ≤
,
1 P PM 2
П МР = 1-1 . n . in
u AM 9 2

0 PM
1-P PM

n p u
0 PM
1-P PM
>
где uAM – среднее значение амплитуды полезного сигнала от ЗК.
Зависимости Ро для образца из U-235 от массы стального ЗК
(при пороге обнаружения МО 300г с РЛ/о>0,95)
Зависимости РОмт
(для образца из U-235 в стальном ЗК) от порога обнаружения МО (при РМо ^ 0,95)
Рис. 11. Выбор порога обнаружения МО для обеспечения требуемого значения полной вероятности обнаружения КРО (1; 2; 3; 4; 5; 6 – вероятность обнаружения РМ образца из урана-235 без ЗК соответственно 0,95; 0,90; 0,85; 0,80; 0,75; 0,50)
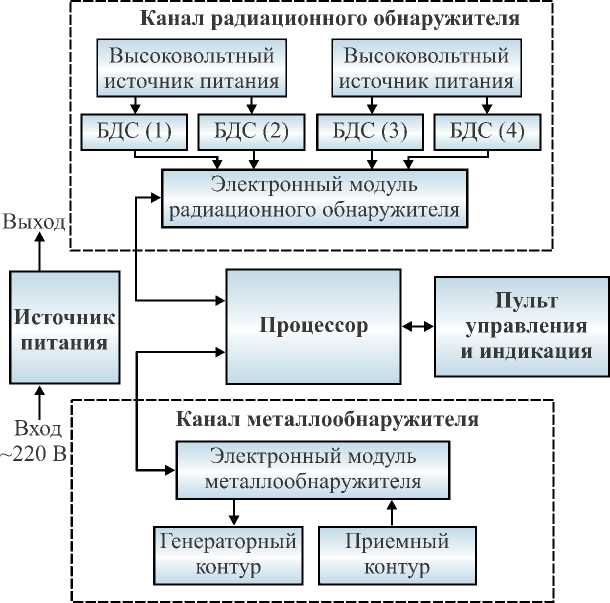
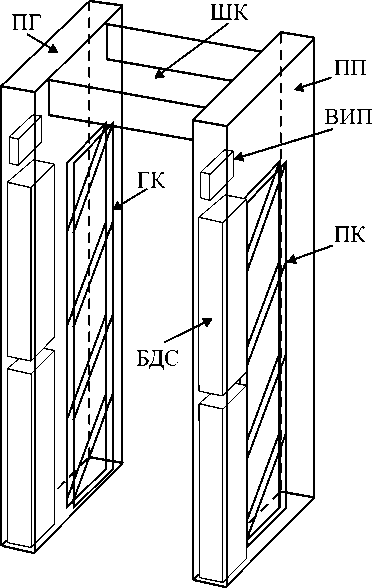
Рис. 12. Структурная схема и схема расположения составных частей комбинированного РМ «Спектр» (ПГ – панель генераторная; ПП – панель приемная; ШК – шкаф коммутационный; ВИП – высоковольтный источник питания)
Выражение (17) позволяет вычислять требуемый порог обнаружения МО в зависимости от величины PPM и, в конечном счете, от текущего уровня радиационного фона, регистрируемого РМ. При таком согласованном выборе порогов общая вероятность обнаружения Р0 всегда остается на требуемом уровне.
Методика выбора порога обнаружения МО должна включать последовательное выполнение следующих процедур.
-
1 Определение начального значения PPM при перемещении РАМ без защитного контейнера и соответствующего ему значения уровня радиационного фона λ0 .
-
2 Выбор размеров и материала защитного контейнера, который, исходя из заданного POMIN , соответствует минимальной пороговой массе ЗК.
-
3 Определение путем статистических испытаний значения uAM для выбранного ЗК.
-
4 Вычисление по формуле (17) значения порога обнаружения МО при Р 0 = P OMIN .
-
5 Измерение текущего уровня радиационного фона λ0 , исходя из которого уточняется РРМ и в соответствии с формулой (17) обновляется значение порога обнаружения ПМО . Представленные выше результаты исследований были реализованы в стационарном комбинированном пешеходном радиационном мониторе «Спектр», разработанном на пред-
- приятии «Дедал» [7]. На рис. 12 изображена его структурная схема и схема расположения составных частей. Экспериментальная проверка прибора «Спектр» в сравнении с типовыми РМ показала, что использование комбинированного РМ обеспечивает более высокую эффективность выполнения задач радиационного мониторинга на пешеходных КПП.
Выводы
Таким образом, при использовании пешеходных радиационных мониторов гамма-излучения необходимо учитывать возможность проноса радиоактивных веществ, помещенных в защитный металлический контейнер. Общая вероятность обнаружения при одновременном использовании радиационного монитора и металлообнаружителя зависит от порогов обнаружения отдельных средств (РМ и МО) и может оказаться меньше требуемого значения. Эффективным решением является использование комбинированного радиационного монитора с функцией обнаружения металлических предметов и согласованный выбор порогов обнаружения отдельных средств. Приведенная выше методика описывает процедуру такого выбора и позволяет произвести оценку ожидаемого значения общей вероятности обнаружения комбинированного РМ ■
Список литературы Пешеходный радиационный монитор с функцией обнаружения металлических предметов
- Миткевич В.С., Рудниченко В.А. Проблемы развития стационарных средств обнаружения металлических предметов и радиоактивных веществ./Современные охранные технологии и средства обеспечения безопасности объектов: Матер. V Всерос. науч.-тех. конф. (г. Пенза-Заречный, 18 -20 мая 2004 г.). -Пенза: Инф.-изд. центр ПГУ, 2004. -С. 307 -310.
- Рудниченко В.А. Оптимизация обнаружителя для радиационного монитора./Проблемы и перспективы совершенствования охраны государственной границы и объектов: Матер. XXI межвуз. науч.-прак. конф. -Науч.-метод. сб. № 21, разд.1, 2. -Калининград: КПИ ФСБ России, 2007. -С. 66 -71.
- Рудниченко В.А., Горлач П.Г. Оценка параметров сигнала радиационного монитора с использованием вейвлет-преобразования./Пожаровзрывобезопасность, 2007. -Т. 16. -№ 5. -С. 50 -53.
- Рудниченко В.А. Особенности построения пешеходных радиационных мониторов./Специальная техника, 2006. -№ 4. -С. 26 -30.
- Рудниченко В.А. Оптимизация металлообнаружителя для пунктов пропуска./Основные направления технического оснащения пограничных ведомств: Науч.-тех. сб. по матер. межвед. конф. на VIII междунар. спец. выст. «Граница-2006». -М.: КЖИ «Граница», 2007. -С. 133 -138.
- Рудниченко В.А. Обнаружение радиоактивных веществ и металла на пешеходных КПП./Телекоммуникационные и вычислительные системы: Матер. конф. (г. Москва, 29 ноября 2006 г.). -М.: МТУСИ, 2006. -С. 187 -189.
- Рудниченко В.А., Звежинский С.С. Пешеходные радиационные мониторы./Современные технологии безопасности, 2007. -№ 3 (22). -С. 24 -28.
