Планирование системы технического обслуживания

Автор: Окладникова Екатерина Николаева, Сугак Евгений Викторович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 6 (13), 2006 года.
Бесплатный доступ
Рассматривается определение параметров системы технического обслуживания в зависимости от вида и назначения объекта, основной принцип назначения сроков технического обслуживания, решение задач оптимизации системы технического обслуживания по графу состояний технического объекта, использование экономико-математических критериев для определения продолжительности работы объекта между отказами.
Короткий адрес: https://sciup.org/148175437
IDR: 148175437
Design of system servicing
It is considers the parameters definition of the maintenance service system, depending on a object kind and purpose; the main principle of purpose of maintenance service terms; the solving of optimization system problems of maintenance service on the basis of construction the column of system state, drawing up of model reliability and definition of maintenance service characteristics; use of economic-mathematical criteria for the definition of operation time of object between refusals.
Текст научной статьи Планирование системы технического обслуживания
Эксплуатация или использование по назначению -самый длительный и ответственный период в жизненном цикле любого технического объекта, в течение которого он испытывает нагрузки различного вида и находится под воздействием внешних условий. В процессе эксплуатации проверяются технологии, методы и приемы, использовавшиеся на всех предыдущих этапах, выявляются их недостатки, проявляются скрытые дефекты конструкционных материалов, погрешности изготовления, сборки и монтажа.
Эксплуатация технической системы - непрерывный процесс, требующий планового и регулярного контроля и воздействия на объект в целом или на его составляющие и элементы, что должно обеспечивать его рабочее состояние и высокий уровень эксплуатационной надежности, который может быть обеспечен при решении двух основных задач: обеспечение нормальных режимов работы элементов и объекта в целом; прогнозирование индивидуального ресурса и назначение оптимальных регламентов эксплуатации. Решение первой задачи предусматривает разработку специальных мер, обеспечивающих снижение предельных режимов нагружения, изно са и старения, уменьшение динамических нагрузок. Решение второй задачи включает выбор оптимальной системы обслуживания, разработку системы контроля, диагностики, сбора и обработки информации о качестве функционирования, принятие оптимальных с точки зрения технико-экономических критериев различных этапов эксплуатации, повышение качества восстановления.
При планировании и оптимизации системы технического обслуживания и ремонта исходная информация может быть задана в виде функции вероятности безотказной работы P ( t ) или отказа 2 ( t ), плотности распределения наработки на отказ/( t ) или интенсивности отказов l( t ).
В зависимости от вида и назначения объекта и вида отказов для определения параметров системы технического обслуживания используются различные методы. При рассмотрении объектов, у которых возможны только явные отказы, проводится полное восстановление работоспособности. Если в предшествующем периоде отказов не было, то обслуживание проводится через интервал времени или наработки т (рис. 1). Если до момента обслуживания был отказ, после которого работоспособ- ность была восстановлена, то график технического об-
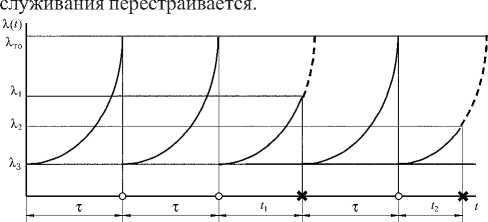
Рис. 1. Изменение интенсивности отказов при техническом обслуживании: о - техническое обслуживание; х - отказ
Считается, что проведение технического обслуживания снижает интенсивность отказов %( t ) до начального значения %0 и тем самым повышает безотказность системы. В этом случае техническое обслуживание эффективно только при возрастающей по времени интенсивности отказов X( t ), связанных с износом, старением или накоплением повреждений элементов. При 1= const техническое обслуживание невыгодно и нецелесообразно, а при убывающей функции %( t ) техническое обслуживание даже может снижать безотказность [1].
В качестве критерия для расчета периодичности технического обслуживания может приниматься минимум средних удельных (на единицу времени) суммарных потерь от отказов и планового технического обслуживания в течение периода между восстановлениями [2]:
C( t ) = C^< t ) + C^ > т), (1) где С 1 - средняя стоимость затрат, связанных с отказом и последующим восстановлением отказавшего объекта; С 2 - средняя стоимость затрат, связанных с проведением планового технического обслуживания.
Если известна функция вероятности безотказной работы P ( t ) или вероятности отказа g ( t ) = 1 - P ( t ), то формулу (1) можно записать в виде
C( t ) = Cg T + C 2[1 - 6 (т)] = C 1 [1 -P( t )] + C^P( t ). (2)
Очевидно, время работы между восстановлениями t = min{ t , т}. Следовательно, математическое ожидание времени работы будет равно
T T
M ( t р ) = J tf ( t ) dt + т P ( t ) = J P ( t ) dt . (3) 00
Тогда средние удельные затраты можно выразить формулой
C ( t ) - Д1" P 1;>1' C - P (t) ...
c с^ । т ■ (4)
M ( t р ) J p ( t ) dt
Для определения значения времени или наработки т, при которых средние удельные затраты с (т) будут минимальными, необходимо производную функции (4) приравнять к нулю. После этого можно получить следующее выражение:
т
P ( t ) +X ( t ) J Р ( t ) dt = -с— . (5)
0 C 1 C -
При известных функциях P(t) и %(t) уравнение (5) позволяет найти оптимальную продолжительность работы объекта между плановыми техническими обслуживани-ями при явных отказах.
Если у объекта возможны только неявные отказы, то при прочих равных условиях в выражении (1) в суммарных затратах необходимо учесть дополнительные потери от скрытого отказа
T
C ( t ) = C 1 p ( t < t ) + С 2 p ( t > t ) + c 3 J tf ( t- t ) dt = C 1 [ 1 -
T
1 - P ( t ) ] + C 2 P ( t ) + c 3 J [ 1 - P ( t ) ] dt =
= C + ( C - - C 1 ) P ( t ) + c 3
t-

где c 3 - средние удельные (в единицу времени) затраты. Средние удельные затраты за время т равны
c (t) =t
C + ( C - - с 1 ) Р ( t ) + c 3
Приравняв к нулю производную выражения (7) по т, получим уравнение
Р (t)+t f (t)- 7^3
T т-J P (t) dt
,
C 1 - с - ,
при решении которого можно определить оптимальную периодичность технического обслуживания.
В отличие от предыдущего случая при неявных отказах объекта проведение технического обслуживания эффективно даже при постоянной интенсивности отказов, так как при этом сокращается время, в течение которого объект неработоспособен.
При оптимальном планировании индивидуального ресурса основной принцип назначения срока следующего технического обслуживания t может быть записан в виде et k +T k )= e *, (9)
где t k = tk +1- t - назначенный остаточный ресурс, g * - предельно допустимое значение вероятности отказа.
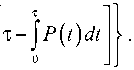
Обычно при назначении периодичности технического обслуживания интервалы времени T k уменьшаются по мере накопления повреждений в основных элементах объекта, хотя общий уровень надежности возрастает (рис. 2).
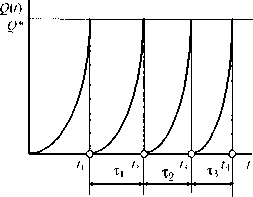
Рис. 2. Изменение вероятности отказа при техническом обслуживании
Наряду с критерием предельно допустимой вероятности отказа для определения продолжительности работы объекта между очередными техническими обслужи-ваниями используются также экономико-математические критерии. При этом требования надежности выполняют роль ограничений [1].
Например, для оптимизации технического обслуживания можно использовать целевую функцию I ( t ), равную математическому ожиданию вклада объекта в произведенную продукцию или полезный экономический эффект при ее эксплуатации на отрезке ( t , t ):
I ( t )- n ( t )- C - E ( t ), (10) где n ( t ) - разность между стоимостью произведенной продукции и ее себестоимостью (т. е. чистая прибыль); С - стоимость изделия; E ( t ) - сумма прямых и косвенных потерь из-за достижения объектом предельного состояния.
Для выбора оптимального момента проведения следующего технического обслуживания должно выполняться условие
I ( t k + т k Н max . (11) 1 k
По мере накопления повреждений и снижения эффективности назначенный остаточный ресурс уменьшается (рис. 3). При некотором значении t > tk эксплуатация должна быть прекращена из-за нарушения ограничения на вероятность отказа Q ( t ) < g *.
при техническом обслуживании
Оптимальную продолжительность работы между техническими обслуживаниями можно также оценивать с помощью безразмерного критерия е:
-
е = [to I ( t k + т k ) ] . (12)
Эксплуатация объекта прекращается, когда значение параметра е становится предельным.
Решение задач оптимизации системы технического обслуживания включает, как правило, построение графа состояний, составление модели надежности и определение характеристик системы технического обслуживания. При этом обычно рассматриваются установившиеся режимы и, соответственно, стационарные модели надежности и финальные значения вероятностей нахождения объекта в каждом из возможных состояний. Определение оптимальных параметров системы технического обслуживания обычно заключается в выборе таких параметров, удовлетворяющих предъявляемым требованиям, при которых возможные потери (ущерб) и затраты на техническое обслуживание минимальны.
В период нормальной эксплуатации интенсивность отказов примерно постоянна и условие стационарности соблюдается по определению [1]. В период же приработ ки для того, чтобы отличия индивидуальных законов распределения наработок элементов мало влияли на форму потока отказов системы в целом, необходимо выполнение соотношения [1]
Mm( t )>10(X0/ 1-1), (13) где N - число элементов в системе; m ( t ) - математическое ожидание числа отказов или неисправностей на рассматриваемом отрезке времени; 10 и 1 - интенсивности (параметры потоков) отказов или неисправностей в начальный момент времени и установившееся значение, соответственно.
Для проверки гипотезы о стационарности потока отказов или неисправностей можно также использовать стандартные процедуры проверки статистических гипотез, однако при интенсивности отказов или неисправностей менее 10-3-10-4 ч-1 наличие периода приработки практически не вызывает отклонений потока отказов от простейшего [1].
Например, в модели резервированного объекта с периодическим контролем технического состояния количество состояний равно шести и, соответственно, возможны переходы восьми видов (рис. 4) [3]. Если для периодического контроля объекты выводятся из работоспособного состояния, т. е. отключаются, то работоспособными являются только состояния 1 и 3 (готовности к работе двух и одного объекта) и поэтому основным показателем надежности можно считать суммарную вероятность Р 13= Р 1+ Р 3. Если же контроль осуществляется без отключения, то работоспособными являются состояния 1 , 2 , 3 и 4 и основным показателем надежности является суммарная вероятность этих состояний Р 1-4= Р 1+ Р 2+ Р 3+ Р 4.
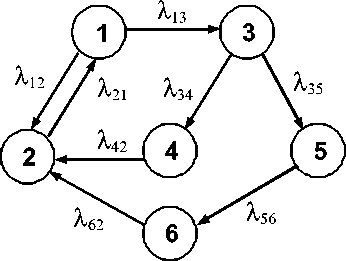
Рис. 4. Граф состояний резервированного объекта с периодическим контролем технического состояния: 1-работоспособное состояние (готовность к работе) основного и резервного объектов; 2 - периодический контроль при двух работоспособных объектах;
3 - работоспособное состояние (готовность к работе) одного из объектов; 4 - периодический контроль при одном работоспособным объектом; 5 - скрытый отказ второго объекта; 6 - периодический контроль при двух отказавших объектах
Интенсивность отказов 1, периодичность контроля t , среднее время контроля тк и устранения отказов (ремонта) т и, соответственно, интенсивности переходов 1 1^ 1 21 1 ^ 1 1 и % 42 = Х б2 - 1/(Тк+ Т р )
могут быть получены по результатам экспериментальных исследований (испытаний) или задаются регламентом. Для нахождения интенсивностей переходов Х34 и Х56 можно воспользоваться свойствами марковских процес сов с непрерывным временем [4].
- 1
х 1 2
1 +--г ( 1 + 2 Х t , )
+ 1
Х 56
-1
2 1 + 2 Х t
К
= -- • ---------
• tK 1 - 2Х tK 2 2
Система дифференциальных уравнений для ориентированного графа состояний (рис. 4) имеет вид dPd = -(Х12 + Х„) P1 (t )+Х 21 ?2 (t);
dP y t l = Х„ P 1 ( t Н21 P 2 ( t ) +^ 42 P , ( t ) +Х„ P 6 ( t ) ;
dP^ = Х„ P 1 ( t ) - ( Х з4 + Х 35 ) P 3 ( t ) ;
dP^ = х„ P 3 ( t ) -Х„ P . ( t ) ;
d ^ = X„ P 3 ( t ) -Х„ P 5 ( t ) ;
'Pd = X I6 P ( t ) -Х б2 P 6 ( t ) .
Систему (16) необходимо дополнить нормирующим условием
P 1 ( f )+ P 2( t ) + Р з (0 +Л(0 "^ + Р 6Ф 1 (17) и начальными условиями, например
P 1 (0) - 1, P 2(0) = Р з (0) = P 4(0)= P 5(0) = 0. (18)
Численный анализ системы дифференциальных уравнений (16) показывает, что при
1 < 10 5ч| переходные процессы в модели практически отсутствуют и при ее анализе можно перейти к системе алгебраических уравнений, составленных для установившегося режима и, соответственно, финальных вероятностей состояний [1]:
-
-(Х 12 +Х 1з ) P 1 + Х 21 P 2 = 0;
Х 12 P -Х 21 P 2 + Х .2 P . + Х б2 P 6 = 0;
Х 13 P 1 - ( Х 34 + Х 35 ) P 3 = 0;
Х 34 P 3 -Х .2 P . = 0;
Х 35 P 3 -Х 56 P 5 = 0;
,Х56 P 5 - Х 62 P 6 = 0.
Из решения системы уравнений (19) с учетом нормирующего условия (17) можно получить выражения для вероятности работоспособных состояний для двух случаев - при контроле с отключением P - P 1+ P 3 и контроле без отключения P 1-4 - P 1 + P 2 + P 3 + P 4:
P
,(20)
Х 35
P - 4 = 1 -
( Л , Х 56
1 . Х 2 ■ Х 3 +
Х 21
262 х ,3
1 + Х 13
з Х 34 + Х 35
f | + Х 34 + Х 35 + Х 35 ' . Х 42 Х 56 Х .
т .(21)
Х 34 + Х 35
Некоторые результаты расчетов представлены на рис. 5 [1].
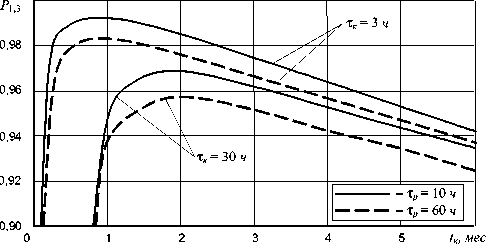
Рис. 5. Зависимость вероятности готовности резервированного объекта от периодичности контроля (Х - 10 4 ч-1)
Из анализа полученных зависимостей можно сделать следующие выводы:
-
- наибольшее влияние на вероятность P 13 оказывают интенсивность отказов 1 и периодичность контроля технического состояния t ;
к’
-
- максимум значения P 13 с уменьшением Х смещается в сторону больших значений t x (при Х - 10-4 ч-1 он соответствует значению t 1-2 месяца, при Х - 10-5 ч-1 - 9-10 месяцев), график P 13( t к) при этом становится более пологим;
-
- оптимальная периодичность контроля пропорциональна его продолжительности т (например, для Х - 10-4 ч-1 увеличение тк с 3 до 30 ч приводит к увеличению оптимальной периодичности с 1 до 2 месяцев, хотя максимальное значение вероятности P 13 при этом снижается на 2,5 %);
-
- отклонения периодичности контроля от оптимального значения (особенно в сторону уменьшения) существенно снижают вероятность готовности объекта, особенно при больших значениях интенсивности отказов (например, для Х - 10-4 ч-1, тк - 3 ч и тр - 60 ч уменьшение ^ с 1 до 0,1 месяца снижает значение P 13 на 4 % по сравнению с максимальным, а увеличение до 2 месяцев - на 1,5 %).
Эксплуатация сложных технических систем, состоящих из большого числа различных подсистем и элементов, требует различных подходов к построению системы их технического обслуживания. В результате система технического обслуживания таких объектов включает в себя несколько видов: непрерывный и периодический контроль технического состояния (диагностирование), регламентное и межрегламентное техническое обслуживание и др.
