Пневматический упругий элемент дифференциального типа

Автор: Хамитов Рустам Нуриманович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 2 (23), 2009 года.
Бесплатный доступ
Предлагается устройство демпфирования колебаний объектов с улучшенными параметрами демпфирования. Для исследования демпфирования колебаний предложенного устройства построена и исследована модель, описывающая термогазодинамические процессы в объемах пневматического упругого элемента при различных режимах работы и динамику амортизируемого объекта, которая позволяет провести анализ и выявить основные закономерности и особенности в работе пневматического упругого элемента, получить его упругодемпфи-рующую характеристику.
Демпфирование колебаний, упругодемпфирующая характеристика
Короткий адрес: https://sciup.org/148175883
IDR: 148175883
Pneumatic elastic elements of differential type
The device for damping of object fluctuations with the improved damping parameters are offered. The model describing thermo gas dynamic processes in volumes of the pneumatic elastic element at various operating modes and dynamics of damped objects for investigation damping fluctuation of the offered device are constructed and investigated. It allows to lead the analysis and to reveal the basic laws and features of the pneumatic elastic element operation to getits elastic damping characteristics.
Текст научной статьи Пневматический упругий элемент дифференциального типа
Управляемые пневматические виброзащитные устройства, как показали предварительные исследования [1], могут наиболее полно удовлетворять требованиям систем амортизации различных объектов, так как обеспечивают регулирование упругодемпфирующей характеристики и хорошую виброзащиту В них в качестве рабочего тела используется лишь одна фаза - газ, благодаря чему нет необходимости выполнять отдельные демпфирующие устройства. С целью увеличения диссипации энергии при колебаниях амортизируемого объекта (АО) был разработан ряд пневматических упругих элементов (ПУЭ) дифференциального типа. В данной работе исследуется конструкция ПУЭ с электромагнитными клапанными устройствами, являющаяся развитием конструкции ПУЭ с гибкими диафрагмами [2]. Упругий элемент состоит из двух рабочих полостей, одного дополнительного объема и клапанных устройств, установленных в перегородках между рабочими и дополнительным объемами (рис. 1). Усилия основного упругого элемента (нижний элемент по схеме) и вспомогательного упругого элемента (верхний элемент по схеме) направлены в противоположные стороны, и несущая способность ПУЭ равна разности произведений избыточного давления на эффективные площади упругих элементов, т е.
Мд = P ст = Р из § э, — P из 5 э2 .
Тогда
Р из 5 э1 = Mg + P из 5 э2 .
Рис. 1. Пневматический упругий элемент
Рабочий процесс при динамике ПУЭ осуществляется следующим образом. При движении АО вниз от исходного положения в основном упругом элементе ПУЭ происходит ход сжатия, а во вспомогательном упругом элементе - ход отдачи, управляемые клапанные устройства закрыты. Увеличение упругой силы основного упругого элемента и уменьшение ее во вспомогательном элементе приводит к резкому уменьшению хода сжатия. При этом Р р1 > P д , а Р р2 < P д . Когда относительная скорость движения АО станет равной нулю, клапанные устройства соединяют полости ПУЭ и давления в объемах ПУЭ мгновенно выравниваются. Управление клапанными устройствами осуществляется системой управления.
В начале движения АО вверх клапанные устройства разъединяют объемы ПУЭ. Увеличение упругой составляющей вспомогательного упругого элемента и уменьшение ее в основном упругом элементе также приводит к резкому уменьшению хода отдачи. При этом Р р2 > P д , а P p1 < P д . Когда относительная скорость движения АО снова станет равной нулю, клапанные устройства соединяют все полости ПУЭ и давления в его объемах выравниваются.
Исследование динамики АО при внешнем воздействии со стороны основания ПУЭ основывается на совместном решении системы нелинейных дифференциальных уравнений, описывающих как изменение параметров движения АО, так и ход термогазодинамических процессов, протекающих во всех объемах ПУЭ (рис. 2). При составлении уравнений приняты следующие допущения:
-
- рабочий газ в ПУЭ подчиняется законам идеальных газов;
-
- температура окружающей среды постоянная и равна т с ;
-
- вследствие кратковременности воздействия внешний теплообмен не учитывается, и рабочий процесс в ПУЭ считается адиабатическим;
-
- процессы выравнивания давления в полостях ПУЭ при коммутации происходят мгновенно;
-
- движение АО происходит только в вертикальном направлении;
-
- эффективная площадь 5 э при движении АО не меняется;
-
- утечки газа из упругих элементов ПУЭ отсутствуют.
В модели использованы следующие обозначения параметров:
Р р1 - текущее давление в рабочей полости основного упругого элемента;
Р р2 – текущее давление в рабочей полости вспомогательного упругого элемента;
P д – текущее давление в дополнительной полости;
Р а – атмосферное давление;
S Э1– эффективная площадь основного упругого элемента;
S Э2 – эффективная площадь вспомогательного упругого элемента;
z 0 , z & 0 , & z &0 – относительные перемещения, скорость и ускорение АО;
z , z &, & z & – абсолютные перемещения, скорость и ускорение АО;
М, Мg и g – масса, вес АО и ускорение силы тяжести;
к – коэффициент адиабаты;
R £ - сила трения, зависящая от скорости движения АО;
V Pi = V P10 + S э1 Z 0 — текущий объем рабочей полости основного упругого элемента;
V 2 = V P20 ± S Э2 Z 0— текущий объем рабочей полости вспомогательного упругого элемента;
Кр10 - объем рабочей полости основного упругого элемента в статическом положении АО;
Кр20 - объем рабочей полости вспомогательного упругого элемента в статическом положении АО;
И - объем дополнительной полости;
цкл- коэффициент расхода газа через клапан;
/ - площадь проходного сечения клапана;
да- суммарная масса газа в дополнительной полости;
л?р - суммарная масса газа в рабочей полости основного упругого элемента;
тр2 - суммарная масса газа в рабочей полости вспомогательного упругого элемента.
Az
dP pi __ kP pi S э1 Z 0 .
dt Vp1 ’ dPp2 _ kPp2Sэ2Z0 .
dt V p2 ;
MZ _ ( P pi _ P a ) S э1 _
_ ( P p2 — P a ) S э2 — Mg — R 2 ( siqn Z ) ;
V р1 = V Р10 – S Э1 Z 0 ;
V р2 = V Р20 + S Э2 Z 0.
Второй режим . При Z _ 0 происходит процесс выравнивания давлений во всех объемах ПУЭ за счет включения клапанов и соединения полостей ПУЭ. Этот режим описывается следующей системой дифференциальных уравнений:
dPp1kPp1Sэ1Z0kPq dmp ------=---1--- dt Pp01-S3Zo mq dt dPp2 _ ^рЗ-^О №qVq dm?
---------- —----:--------------------------:--_ dt Рр02 + S^Zo Pp02 + S3Z0^mq dt
dP„ kR, dm„ dt m„ dt ’
dm„
— = И/кл dt ™
2k Pqmq ^-1 Vq
pl
k-\
к
-1
Pq „ _ при — >0,528;
Pp1
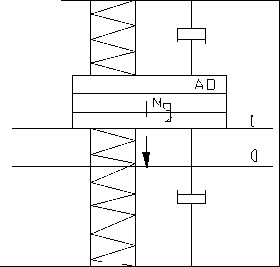
Рис. 2. Расчетная схема динамики ПУЭ
dm 2k Pqmq ( 2 V-i .
— = И/кл. , , т-7 "I at \ к -1 V к +1) I 4
Pq при -^<0,528 ;
рР1
7 _dZ0
и dt ’
2WZ0=(ppl-Pa)S31-
- (^2 - Ра ) S31 - Mg - R^ (signZ0).
Третий режим. Управляемые клапаны закрываются. В основном упругом элементе происходит процесс рас
Для определения термодинамических параметров газа в рабочих и дополнительных объемах ПУЭ выделим следующие режимы работы.
Первый режим. Основной упругий элемент 1 находится на ходе сжатия, вспомогательный элемент 2 - на ходе отдачи, Рр1 >Р^>Рр2(рис. 1). Управляемые клапаны перекрыты.
При этом режиме в рабочем объеме основного упругого элемента происходит процесс сжатия воздуха, а в рабочем объеме вспомогательного упругого элемента 2 идет процесс расширения. Система дифференциальных уравнений, описывающая этот режим работы, имеет следующий вид:
ширения газа, а во вспомогательном упругом элементе
- процесс сжатия газа, где Р < Pq< Р 2:
dPpl _ ^р1^э1^0 .
----- —5
dt dPpi _ ^р2^э2^0 ■ dt1^2
MZ = (Ppi-Pa)S3i-
_ ( P p2 _ P a ) S э2 _ Mg _ R 2 ( siqn Z ) ;
V р1 = V Р10 + S Э1 Z 0 ;
V р2 = V Р20 – S Э2 Z 0.
Четвертый режим . При Z = 0 происходит процесс выравнивания давлений во всех объемах ПУЭ за счет включения клапанов и соеди сывается следующей с нений:
dP p1 kP p1 S э1
---------- =----:-------------------------:-- dt ^ p01 + 5 31z0 (l^+S3Z0^mq dt
dP p2 k
= dt Vp
щения, многоканального аналого-цифрового преобразователя (АЦП) В-480G и персонального компьютера с программным обеспечением. В процессе исследований контролировалось давление газа во всех полостях ПУЭ, а также линейные перемещения основания ПУЭ и АО. По результатам натурных испытаний построена упругая характеристика основного упругого элемента ПУЭ и семейство упругодемпфирующих характеристик ПУЭ при различных значениях амплитуды колебания основания ПУЭ (рис. 3).
dP
q dt
ч
dm
— = м4л dt кл
2к Pqmq k
Pq при
РР2
dm
p
μ f кл dt
2^ РдШд k
Рр2
fc-1
к
-1
2 Ш t
Pq „ „ при —ч— < 0,528;
P p 2
& dZ 0
Z 0 = d MZ0=^PpX-P^S3X-
“ (^2 - Ра ) ^э2 - М§ - ^S (sign^O ) ■
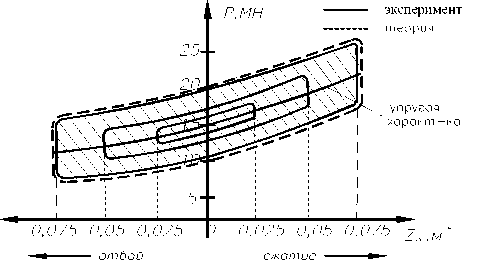
Рис. 3. Упругодемпфирующие характеристики ПУЭ
При дальнейшей работе ПУЭ все термогазодинамические процессы в его объемах повторяются. За основу при расчете выбран ПУЭ (рис. 1) со следующими начальными значениями параметров: -Рр10иРр20 = 0,588 МН/м2; 5Э1 = 0,Зм2; 5э2=0,15м2; Н= 0,58 m3;Vpw = 0,38 м3; 1га=0,2м\
Для определения рабочих характеристик ПУЭ был выбран эксплуатационный режим работы, при котором основание ПУЭ совершает гармонические колебания по синусоидальному закону с различными частотами возмущения, в том числе с частотой собственных колебаний системы:
Площадь петли гистерезиса на упругодемпфирующей характеристике равна сумме поглощенных энергий основного и вспомогательного упругих элементов. Как показывают расчеты и опыт, максимальный коэффициент поглощения энергии ПУЭ достигает значения при различных режимах работы ПУЭ п = 0,8_0,9, что говорит о высокой энергоемкости ПУЭ данной конструкции.
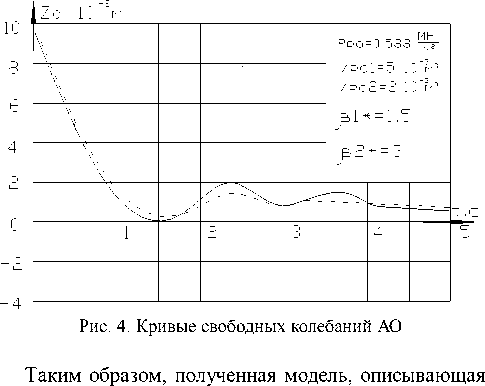
Построенные кривые свободных колебаний АО (рис. 4) соответствуют различным значениям коэффициента поглощения энергии колебаний р АО и абсолютного давления Р20 в полости ПУЭ при статическом положении АО.
Zo = Zo«sin^
где Z^— амплитуда колебаний основания ПУЭ; w- частота вынужденных колебаний.
Исследование динамики ПУЭ осуществлялось с помощью пакета MathCAD. По результатам расчета динамики ПУЭ построены упругодемпфирующие характеристики (рис. 3) при частоте колебаний, равной собственной частоте колебаний системы, и кривые свободных колебаний АО (рис. 4).
Испытания натурного образца ПУЭ проводились на базе экспериментального стенда. Исследование работы ПУЭ осуществлялось на базе измерительного комплекса, состоящего из системы датчиков давления и переме-
термогазодинамические процессы в объемах ПУЭ и динамику АО, позволяет провести анализ и выявить основные закономерности и особенности в работе ПУЭ. Подобный управляемый ПУЭ наиболее полно удовлетворяет требованиям систем амортизации как крупногабаритных объектов, так и транспортных средств и может быть рекомендован для использования в виброзащитных системах указанных устройств.
