Подход к построению системы обработки открытых данных дистанционного зондирования Земли для мониторинга наводнений с использованием технологий больших данных

Автор: Карташев В.И., Фахми Ш.С., Антонова А.А., Алексеенко Я.В.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации, статистика (технические науки)
Статья в выпуске: 1 (48), 2025 года.
Бесплатный доступ
Ежегодно на территории Российской Федерации происходит до 70 крупных наводнений. В зону возможного бедствия могут попадать десятки тысяч населённых пунктов, в которых проживает до 5 млн человек. Для предотвращения жертв среди населения и ущерба для экономики необходимо своевременно обнаружить угрозы и провести превентивные мероприятия. Данные дистанционного зондирования Земли (ДЗЗ) из космоса являются одним из основных источников достоверной и своевременной информации о наводнениях. Для всесторонней оценки обстановки, связанной с наводнениями, требуется получать данные ДЗЗ различного разрешения и масштаба (охвата территории). В настоящее время пользователям доступен обширный перечень источников открытых данных ДЗЗ, в т. ч. с возможностью непосредственного получения данных на собственные аппаратно-программные комплексы приёма. Авторами предлагается методология построения системы обработки данных ДЗЗ для мониторинга наводнений, которая базируется на открытых данных ДЗЗ и открытом программном обеспечении, в т. ч. для работы с большими данными. Эта система позволяет выстроить цепочку обработки данных ДЗЗ с момента получения данных и до готового тематического продукта.
Обработка данных дзз, мониторинг наводнений, параллельная обработка, распределённое хранение данных
Короткий адрес: https://sciup.org/143184196
IDR: 143184196 | УДК: 004.657:528.85
An approach to constructing a system for processing open earth remote sensing data for flood monitoring using big data technologies
Every year up to 70 major floods occur in the territory of the Russian Federation. Tens of thousands of communities with the total population of up to 5 million may find themselves within a disaster area. To avoid human casualties and economic losses, early threat detection is needed in order to implement preventive measures. Earth Remote Sensing (ERS) data from space are one of the major sources of reliable and timely information about floods. For overall assessment of the flood situation, ERS data of various resolutions and scales (territorial coverage) are needed. At present, users can access an extensive list of open ERS data sources, including those that allow direct reception of data at the user's own hardware and software receiving systems. The authors propose a methodology for constructing a flood monitoring ERS data processing system, which is based on open ERS data and open-source software packages, including those for big data processing. This system makes it possible to build an ERS data processing pipeline from data reception to the thematic end product.
Текст научной статьи Подход к построению системы обработки открытых данных дистанционного зондирования Земли для мониторинга наводнений с использованием технологий больших данных
Наводнения являются наиболее разрушительными стихийными бедствиями, которые затрагивают в среднем около 80 млн человек в год по всему миру и вызывают больше смертей и материального ущерба, чем любые другие природные явления [1–2]. По данным Министерства природных ресурсов и экологии Российской Федерации наводнения ежегодно наносят материальный ущерб экономике Российской Федерации в размере 75 млрд руб [3]. В 2023 г. зарегистрировано 17 чрезвычайных ситуаций, связанных с опасными гидрологическими природными явлениями [4]. Территория Российской Федерации обычно подвергается воздействию наводнений с апреля по сентябрь, в периоды весеннего половодья и летне-осенних паводков.
Для планирования и выполнения превентивных мероприятий требуется осуществлять своевременный мониторинг складывающейся обстановки и прогнозирование её дальнейшего развития. Данные дистанционного зондирования Земли (ДЗЗ) из космоса являются мощным инструментом для мониторинга наводнений [4–10]. Развитие открытой глобальной группировки космических аппаратов (КА) (Aqua, Terra, Suomi-NPP, NOAA-20 и т. д.) позволяет осуществлять мониторинг всей территории Российской Федерации с относительно низкими затратами — не требуется покупка данных на постоянной основе: достаточно построить собственную инфраструктуру получения и обработки данных либо получения готовых продуктов для дальнейшего использования. Помимо этого, бесплатные спутниковые данные значительно развились с точки зрения частоты получения данных и их качества, в первую очередь пространственного и спектрального разрешения [11–14]. В то же время, в последние годы наблюдается значительный рывок развития технологий обработки и хранения больших объёмов данных (технологий больших данных). Совместное использование данных ДЗЗ и технологий больших данных приводит к синергетическому эффекту при использовании результатов космической деятельности [15–22].
Для принятия своевременных мер по предотвращению гибели людей и снижению ущерба от наводнений требуется своевременное обнаружение опасных зон. Для этого нужно осуществлять глобальный мониторинг всей территории Российской Федерации несколько раз в сутки космическими аппаратами низкого разрешения, а также получать космические снимки среднего и высокого пространственного разрешения для детальной оценки складывающейся ситуации. Помимо этого, создание в течение нескольких лет базы данных фактических зон наводнений позволит повысить точность прогнозирования наводнений [23–26]. В этой работе представлен подход к построению системы обработки открытых данных ДЗЗ для мониторинга наводнений с использованием технологий больших данных с низкой задержкой по времени получения тематических продуктов мониторинга опасных гидрологических явлений. Данный подход применяется в МЧС России с февраля 2022 г. Опыт использования результатов системы обработки данных ДЗЗ, рассматриваемой в данной статье, показал эффективность и точность определения зон наводнений и опасных гидрологических явлений.
Выбор данных и общая схема функционирования
Развитие информационных технологий привело к высокой автоматизации процессов обработки данных ДЗЗ. В настоящее время существует достаточно много информационных систем и ресурсов автоматической обработки данных ДЗЗ [27–34], которые предоставляют пользователю различные инструменты для интерактивной обработки и анализа данных ДЗЗ. Однако все они имеют закрытую инфраструктуру и используют проприетарный стек технологий. Кроме этого, пользователи могут потерять доступ к информационным системам и ресурсам по не зависящим от них причинам (геополитическим, финансовым и т. п.).
Учитывая вышеизложенное и тот факт, что данные ДЗЗ относятся к большим данным [35–38], авторами предлагается подход к построению системы автоматической обработки данных ДЗЗ, которая основана на открытом программном обеспечении, а также на активном использовании технологий обработки больших данных. Новизной предлагаемого авторами подхода является синергетика использования классических алгоритмов обработки данных ДЗЗ и технологий больших данных, а также использование открытого программного обеспечения.
В настоящее время основными спутниковыми программами, которые предоставляют бесплатный глобальный доступ и имеют соответствующее программное и методическое обеспечение, являются:
-
• система наблюдения Земли ( Earth Observation System, EOS ) — КА Aqua (сенсор MODIS [39], запуск — 2002 г.) и Terra (сенсор MODIS , запуск — 1999 г.);
-
• объединённая полярная спутниковая система ( Joint Polar Satellite System , JPSS ) — КА Suomi-NPP (сенсор VIIRS [40], запуск — 2011 г.), NOAA-20 (сенсор VIIRS , запуск — 2017 г.) и NOAA-21 (сенсор VIIRS , запуск — 2022 г.), а также планируемые к запуску в 2027 и 2032 гг. КА JPSS-3 и JPSS-4 соответственно;
-
• Sentinel-3 — КА Sentinel-3A (сенсор OLCI [41], запуск — 2016 г.) и Sentinel-3B (сенсор OLCI , запуск — 2018 г.), на замену которым планируется запустить КА Sentinel-3C (запуск планируется в 2026 г.) и Sentinel-3D (запуск планируется в 2028 г.).
Для обеспечения оперативного реагирования на наводнения, а также для качественного детектирования их границ, КА должны отвечать следующим требованиям [42–45]:
-
• широкая полоса съёмки (от 2 000 км и более);
-
• обеспечение максимально воз-
- можного пространственного разрешения в видимом и инфракрасном диапазонах (ближнем и коротковолновом);
-
• время получения пользователем (лицом, принимающим решение) тематического продукта наводнения с момента пролёта КА должно быть приближено к реальному (не более 3 ч с момента съёмки территории интереса).
Таким требованиям отвечают КА программы JPSS , так как:
-
• данные можно получать в режиме непосредственного сброса (на собственную сеть станций приёма);
-
• сенсоры имеют пространственное разрешение 375 м в видимом и инфракрасном диапазонах (ближнем и коротковолновом);
-
• ширина полосы обзора составляет 3 000 км и относительно постоянное разрешение по всему скану.
Помимо этого, в открытом доступе размещены программные продукты, которые реализуют алгоритмы обнаружения воды, облаков, теней от облаков и определения доли воды на основе данных сенсора VIIRS . Таким образом, КА, оснащённые сенсором VIIRS , являются отличным источником данных для обнаружения наводнений практически в реальном времени. Используя программное обеспечение для обработки данных ДЗЗ, полученных от сенсора VIIRS [46], в совокупности с программными продуктами из области больших данных [47–49], был разработан предлагаемый подход к созданию информационной системы, общая схема функционирования которой представлена на рис. 1.
^
Космические аппараты ДЗЗ
Собственная сеть станций приёма
Агрегация данных Apache NiFi

I.
Открытые источники данных ДЗЗ

Запись данных в распределённую файловую систему Hadoop
Потоковая параллельная обработка данных -создание тематических продуктов Apache Airflow

Greenplum

Отображение тематических продуктов через юей-интерфейс Geoserver, MapSewer
Рис. 1. Общая схема функционирования: ДЗЗ — дистанционное зондирование Земли (рисунок создан авторами)
Описание функционирования
Источниками данных ДЗЗ для функционирования предлагаемой информационной системы могут выступать как собственные станции приёма, так и открытые информационные ресурсы. Получение данных на собственные станции приёма (в режиме прямого вещания) обеспечивает высокую оперативность выхода конечного тематического продукта от момента получения результатов пролёта КА в зоне радиовидимости станции. Рассмотрим вариант получения данных с КА, оснащённых сенсором VIIRS , на собственные станции приёма.
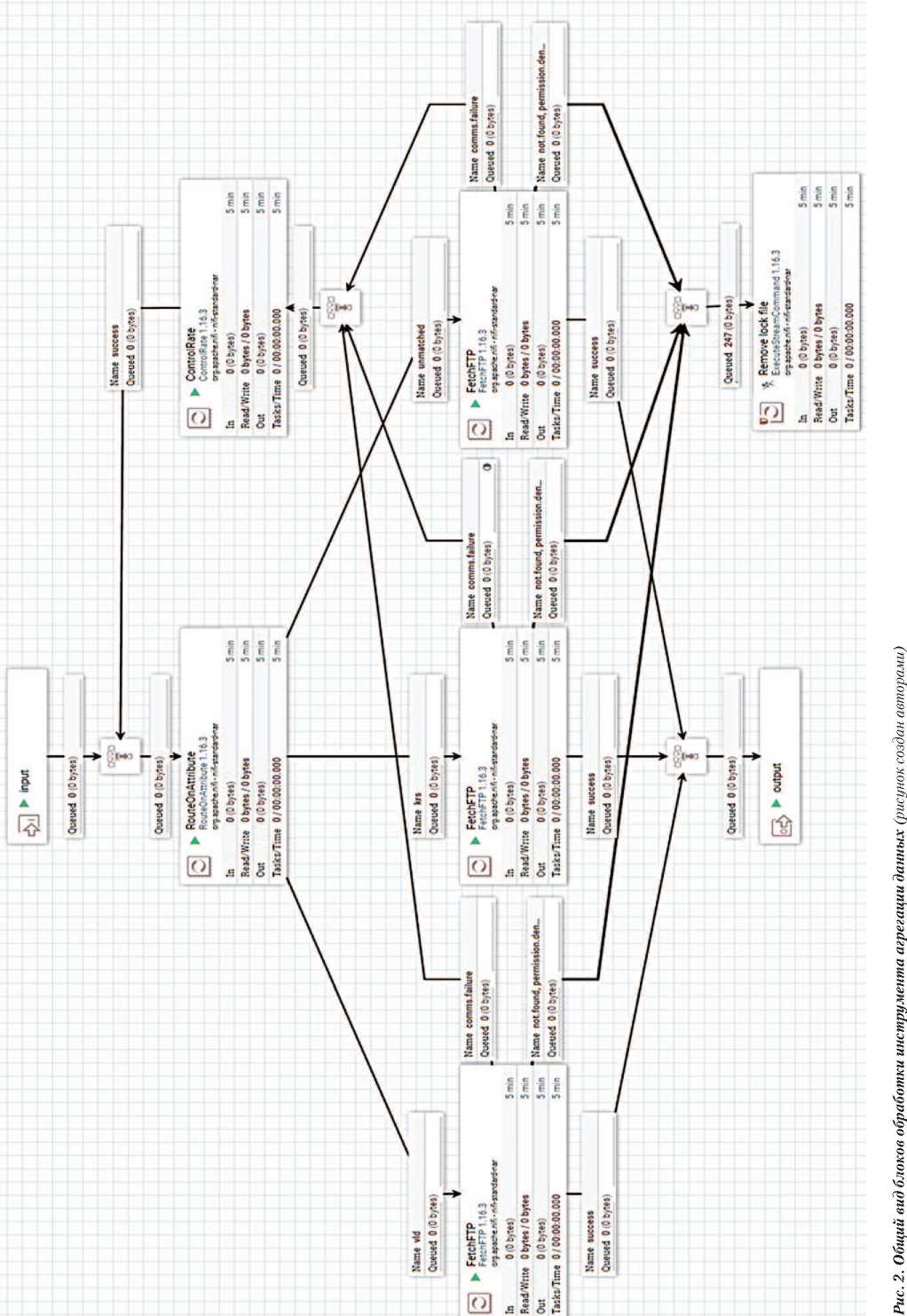
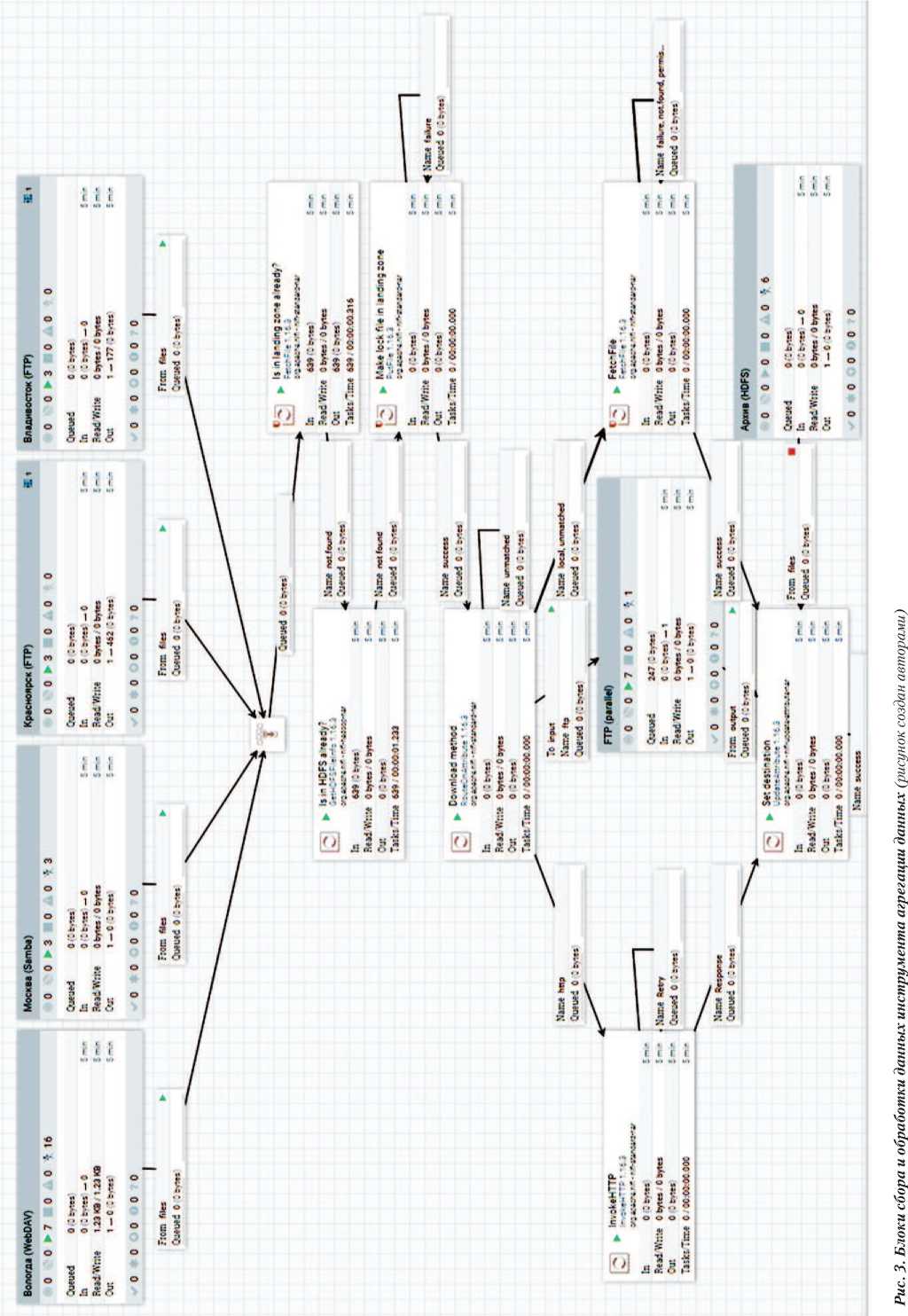
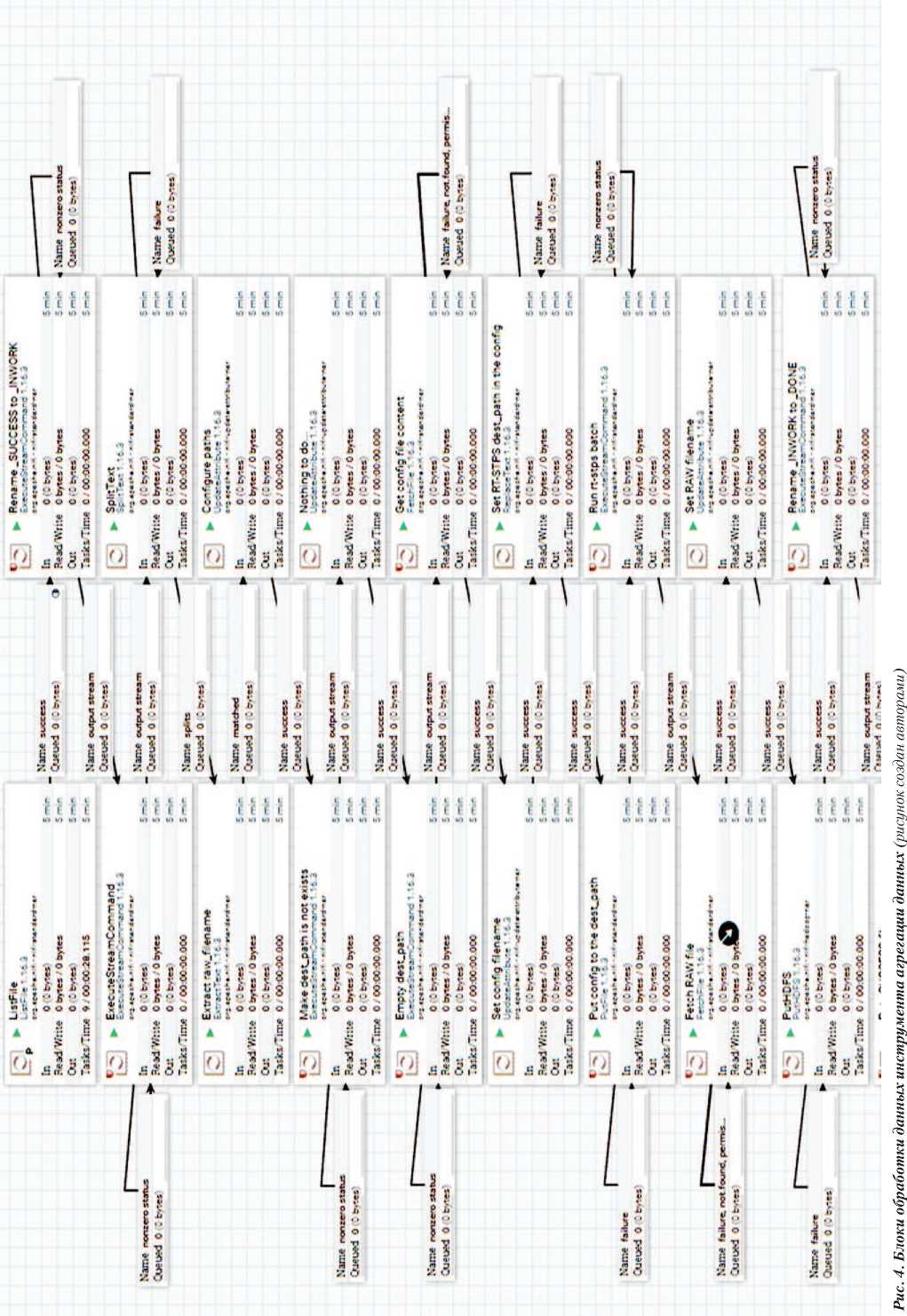
Станции приёма распределены территориально, обработка данных происходит централизованно в центре обработки и хранения данных (ЦОХД). После сеанса приёма файл «сырого» потока (в формате raw) записывается в директорию, имеющую настройки для внешнего доступа по протоколу smb или ftp (директория обмена). В ЦОХД развёрнут инструмент агрегации данных с использованием Apache NiFi [50], который автоматически проверяет директории обмена на наличие новых данных (файлов raw). При наличии новых файлов осуществляется загрузка файлов из директорий обмена в ЦОХД и размещение их в распределённой файловой системе (РФС). После записи файлов в РФС осуществляется предварительная обработка данных из «сырого» потока (уровень обработки 0) до уровня обработки 1. Использование Apache NiFi обуслов- лено следующими характеристиками:
-
• простотой развёртывания и настройки (поддерживается развёртывание в кластере контейнеров);
-
• открытым исходным кодом;
-
• простым созданием цепочек обработки (создание блоков обработки осуществляется во встроенном графическом редакторе);
-
• обширной и понятной документацией, а также активным сообществом
разработчиков и пользователей.
Примеры блоков обработки представлены на рис. 2–4.
При обработке данных сенсора VIIRS применяется программный пакет обработки спутников сообщества [51].
Данный пакет распространяется в соответствии с публичным лицензионным соглашением GNU (General Public License, открытое лицензионное соглашение GNU). Результаты обработки данных инструментом агрегации данных записываются в РФС.
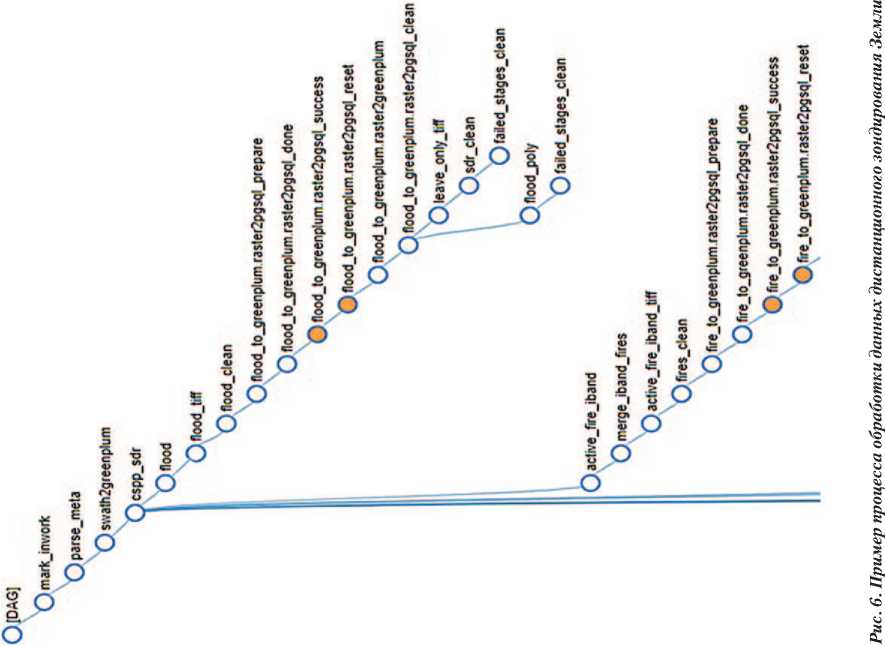
Для создания тематических продуктов используется программный продукт Apache AirFlow [48], в котором обработка происходит в потоково-параллельном режиме. Выбор использования Apache AirFlow был обусловлен тем, что для описания процессов обработки данных используется язык программирования Python , а также тем, что он имеет открытый исходный код и большое количество готовых операторов обработки данных. Процесс обработки представляет собой направленный ациклический граф (рис. 5).
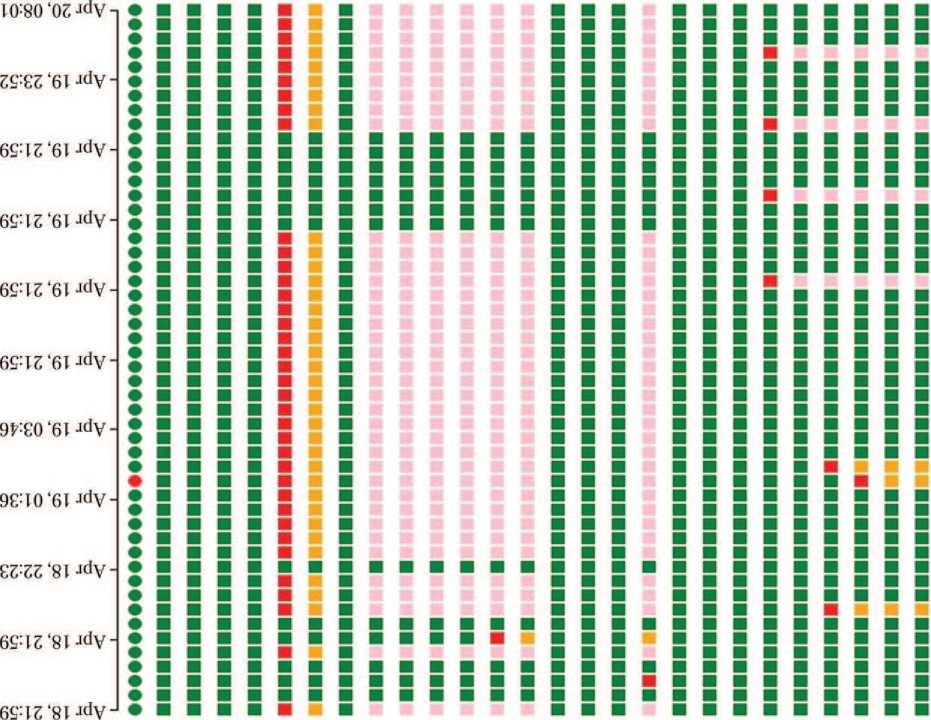
На данном этапе обработки создаются тематические продукты [мониторинга наводнений и ландшафтных (природных) пожаров]. Процесс обработки построен на открытом программном обеспечении, и каждый этап обработки запускается в отдельном контейнере Docker , что обеспечивает гибкую настройку и развёртывание. Для каждого графа обработки возможно осуществлять интерактивный мониторинг выполнения задач и их статус (рис. 6).
Создание тематических продуктов мониторинга наводнений выполняется с помощью доработанного алгоритма VIIRS-flood [52]. Данный алгоритм использует в своей работе дерево решений, в результате чего осуществляется классификация изображения по нескольким классам (наводнения и количество фракций воды в пикселе, облака, тени от облаков, снег, лёд и др.). В основе алгоритма заложены физические основы, заключающиеся в спектральных различиях между водными объектами и прочими типами земного покрова в видимом (для сенсора VIIRS канал I1, 600–680 нм), ближнем инфракрасном (для сенсора VIIRS канал I2, 850–880 нм) и коротковолновом инфракрасном (для сенсора VIIRS канал I3, 1 580–1 640 нм) диапазонах. Таким образом, применяются три индекса: нормализованный разностный индекс растительности (NDVI, Normalized Difference Vegetation Index), нормализованный разностный водный индекс (NDWI, Normalized Difference Water Index) и нормализованный разностный индекс снега (NDSI, Normalized Difference Snow Index), определённые в формулах (1)–(3).
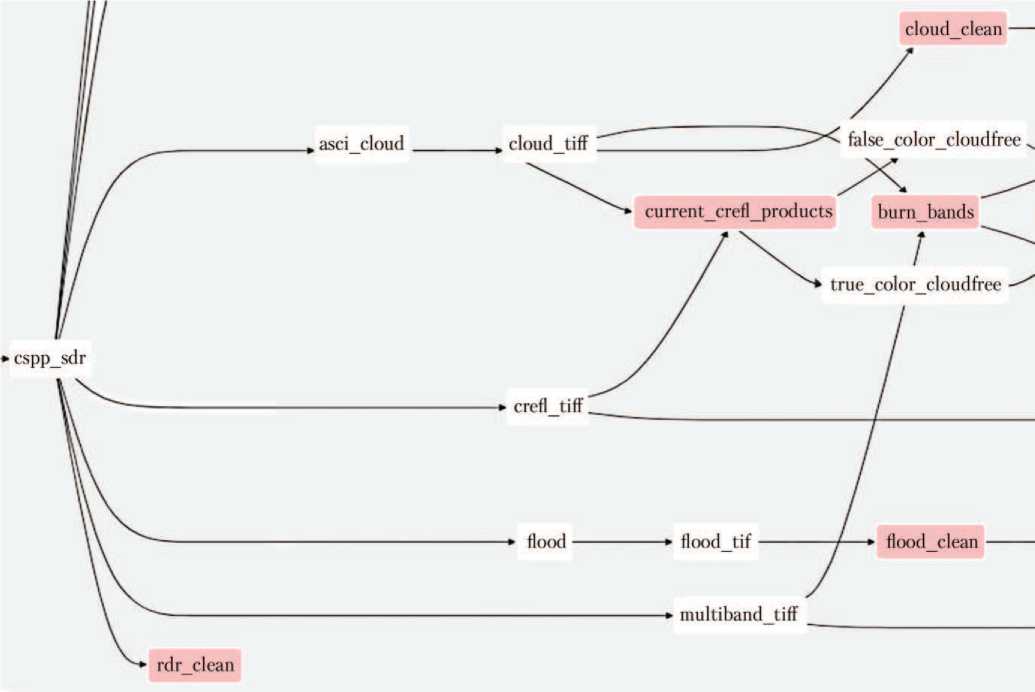
Рис. 5. Направленный ациклический граф процесса обработки данных дистанционного зондирования Земли (рисунок создан авторами)
NDVI = RNIR – RVis;(1)
RNIR + RVis
NDSI = RVis – RSWIR;(2)
RVis + RSWIR
NDWI = RNIR – RSWIR,(3)
RNIR + RSWIR
где RVis , RNIR и RSWIR — отражение в видимом, ближнем инфракрасном и коротковолновом инфракрасном каналах соответственно.
Каждый индекс по отдельности не может с высокой вероятностью отличить водные объекты от других типов земной поверхности. Для надёжного обнаружения наводнений используется комбинация этих индексов. Помимо этого, для надёжного обнаружения воды среди снежно-ледяных поверхностей применяется переменная разницы NDVI между пикселем и окружающей поверхностью льда/снега ( DNDVI , Differenced Normalized Difference Vegetation Index ).
На надёжность обнаружения паводковых вод сильно влияет наличие теней от облаков и местности. Тени и паводковые воды имеют схожие спектральные характеристики, что требует применения комплекса мер для автоматического детектирования наводнений. Для этого требуется обнаружить воду, маскировать тени от облаков и местности, детектировать незначительные наводнения и определить долю паводковых вод в пикселе.
Ввиду того, что обнаружение воды среди голой почвы/растительности и воды среди снега и льда требует применения разных спектральных методов, детектирование воды осуществляется в два этапа. Сначала проводится классификация пикселей по облачному покрову, снежному/ледяному покрову и суше/воде. После этого проводится ряд испытаний на определение воды в классе пикселей снежного/ледяного покрова. В классе суша/вода определение воды выполняется с помощью дерева решений, которое использует каналы сенсора VIIRS I 1, I 2, I 3, а также индексы NDVI , NDWI и NDSI .
Для классификации пикселей воды среди снега и/или льда применяются уравнения (4) и (5). Если выполняется уравнение (4), то пиксель сразу классифицируется как пиксель воды среди снега и/или льда. При выполнении условий (5) пиксель классифицируется как возможный пиксель воды среди снега и/или льда с последующим тестированием по параметру DNDVI .
RVis ≥ 45%;
NDVI ≤ –0,2;
40% ≤ RVis < 45%;
–0,2 < NDVI ≤ –0,04.
Расчёт DNDVI представляет собой динамический процесс в пределах движущегося окна 50×50. Для возможного пикселя воды среди снега и/или льда вычисляется максимальная отражательная способность в видимом канале RVis max всех пикселей снега/льда (на основе маски снежного/ледяного покрова) в соседнем окне 50×50. Если они соответствуют условиям в уравнении (6), то пиксели снега/льда собираются и используются для расчёта среднего NDVI фоновой поверхности снега/льда. DNDVI вычисляется путём вычитания NDVI фоновой поверхности снега/льда из NDVI возможного пикселя воды среди снега и/или льда.
R
Vis max
10% ≤ R Vis
Vis max;
RVis ≥ 55%;
NDVI ≥ –0,05.
Для удаления из классификации пикселей тающего снега и теней на снежных поверхностях применяется условие (7).
DNDVI > –0,06. (7)
Проведя вышеуказанные процессы, получится определить значительную часть пикселей воды. Ввиду того, что тени от облаков и местности приводят к ложным срабатываниям, требуется провести их отделение. Для этого применяется геометрическая модель над сферической поверхностью. Модель итеративно применяется для однозначного отношения, исходя из предположения, что один
пиксель облака отбрасывает один пиксель тени облака. Положение пикселя облака P (latP, lonP), если известно положение пикселя облака B (latB, lonB), определяется вычислением дуги с использованием азимутального угла сенсора ϕB.
lat P =
sin
sin(lat B ) . cos
lonP = lonB + tg
P B
R
+ cos(lat B ) . sin
sin ф B • sin
PB
R
PB
R
•COS ф B
. cos(lat B )
PB cos – sin(lat ) . sin(lat )
R B P latА
sin
sin(lat Р ) . cos
PА R
+ cos(lat Р ) . sin
P А R
•cos ф Р
lon А = lon Р +
sin ф Р • sin
PА
tg
R
. cos(lat Р )
cos
P А
R
sin(lat Р ) . sin(lat А )
В уравнениях (8)–(11) R — радиус тального угла ϕP, а также учитывается
Земли; дуга PВ представляет собой параллаксное расстояние между реальным положением облака P и положением облака на космическом снимке B. При определении положения тени от облака A учитывается положение облака и рассчитывается с использованием солнечного азиму- длина тени PА. PА и PВ рассчитываются как дуги по окружности радиуса R с применением угла тени α и угла параллакса β. Углы α и β рассчитываются с использованием уравнения (12), где δ представляет собой угол α или угол β; h — высота облаков, а θ — зенитный угол.
8 =------------------------------
( R + h )2 –
cos
[^R. R • cos2 9 + h • ( h + 2 R ) - R • cosQ^' 2 + R 2
2 . R . ( R + h )
Если положение тени A известно, то уравнения (8)–(12) могут применяться для прогнозирования положения облака B .
Для удаления теней от местности применяется уравнение (13).
Y > 60
или у th < у < 60;
ave ave_th ;
|D n | ≥ 3;
N w ≤ 1,
осуществляется на группе соседних пикселей. Пиксели воды группируются и рассматриваются как один объект. Если объект удовлетворяет условиям (13), то он маркируется как тень на местности.
Для автоматического обнаружения небольших наводнений применяется метод, заключающийся в расчёте средней отражательной способности в каналах NIR (ближнем инфракрасном) и SWIR (коротковолновом инфракрасном) в соседних окнах 50 х 50 для растительности ( RNIRV , RSWIRV ) и голой земли ( RNIRB , RSWIRB ) соответственно. Для определения воды применяются системы неравенств (14) и (15).
или
у th + 5 < у < 60 ;
D
ave
≥ D
ave_th
+ 20;
N > 3;
N w > 1;
P w < 5%,
где y — среднеквадратичная высота; Dave — внутренняя разность высот между средними высотами верхней и нижней поверхностей; Dn — внешняя разность высот между средними высотами соседних пикселей воды и средние высоты пикселей тени местности; Nw — общее количество пикселей нормальной воды; Pw — процент пикселей нормальной воды; y th и D ave th — эмпирические пороговые значения, которые связаны с общим количеством пикселей воды/тени и общей длиной в горизонтальном и вертикальном направлениях в объекте.
Удаление теней от местности осуществляется объектно-ориентированным методом с использованием цифровой модели рельефа SRTM-2 ( Shuttle Radar Topography Mission , радиолокационная топографическая миссия шаттла). Ввиду того что метод является объектным, анализ шероховатости
R NIR ≤ 26%;
R SWIR ≤ 15%;
NDSI > –0,12; ( 14 )
– RNIR_V – RNIR ≥ 8%;
-
RSWIR_V – RSWIR ≥ 4%.
-
R NIR ≤ 25%;
-
RSWIR ≤ 17%;
NDSI > –0,15; ( 15 )
–
-
RNIR_В – RNIR ≥ 7%; –
-
RSWIR_В – RSWIR ≥ 8%.
Для более точной оценки наводнения с использованием космических снимков низкого разрешения целесообразно вместо классификации по маске вода/отсутствие воды применять метод расчёта процента воды в пикселе. Для этого применяется метод динамического поиска ближайшего соседа, основанный на линейной комбинированной модели, которая выражается уравнением (16).
R – R land mix fw = R – R , land water где Rmix — коэффициент отражения смешанного пикселя; Rland — коэффициент отражения чистой земной поверхности; Rwater — коэффициент отражения чистой водной поверхности.
Совместное использование видимого, ближнего инфракрасного и коротковолнового инфракрасного каналов позволяет рассчитать коэффициент отражения пикселей чистой земной поверхности Rland при удовлетворении условиям уравнения (17), после чего он применяется в уравнении (16) для расчёта fw .
Vis_mix
R
R SWIR_mix
R
R NIR_mix
R
R SWIR_mix
Viswater
_ <
R SWIR_mix
R
R NIR_water
R
R SWIR_mix
<
Vis_land
R SWIR_land
R
NIR_land
R
R SWIR_mix
<
<
R
Vis_mix
R SWIR_mix
R
R NIR_mix
R
R SWIR_mix
;
.
В работе алгоритма используется глобальная маска воды, созданная на основе данных с сенсора MODIS , MOD44W [53]. Маска MOD44W создана по состоянию территорий на 2008 г. и имеет пространственное разрешение 250 м. Помимо того, что данная маска воды была создана значительное время назад, она не включает в себя малые реки. Для повышения эффективности работы алгоритма была создана маска воды с использованием данных с космических аппаратов типа Sentinel-2 с последующей передискретизацией до разрешения 375 м. Это позволило использовать при создании тематических продуктов актуальную и более точную маску воды.
Выходным результатом работы алгоритма VIIRS-flood является растровый файл. Для отображения в геопортале и для последующей геоаналитики данный растровый файл векторизуется, а результаты обработки (растровые и векторные данные) записываются в базу данных, построенную на базе Greenplum [49]. Greenplum представляет собой массово-параллельную систему управления базами данных на основе PostgreSQL . Для отображения созданных тематических слоёв используется геопортал, который построен на базе открытого программного обеспечения GeoServer , который предоставляет инструменты для администрирования и публикации геоданных [54].
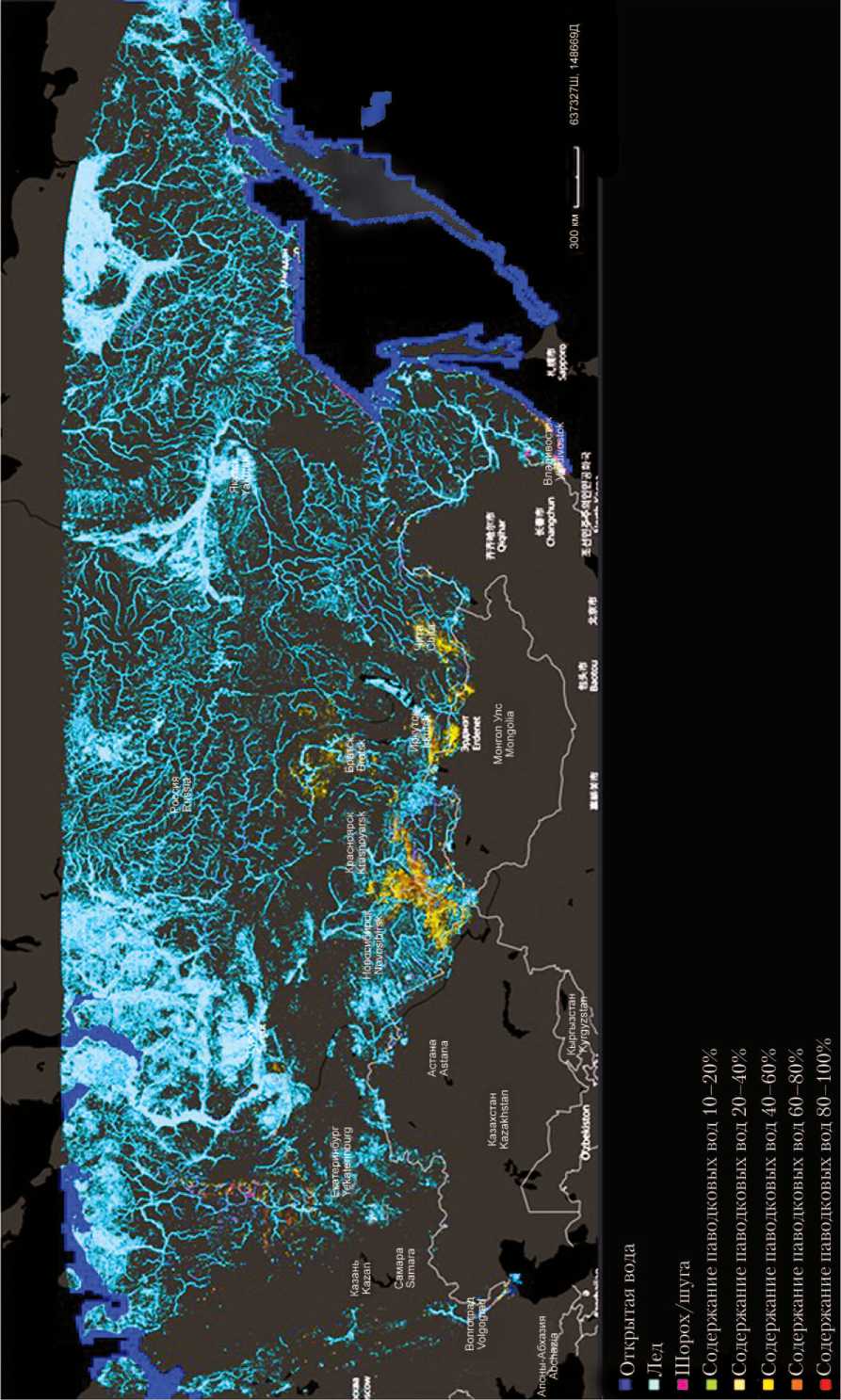
Примеры использования
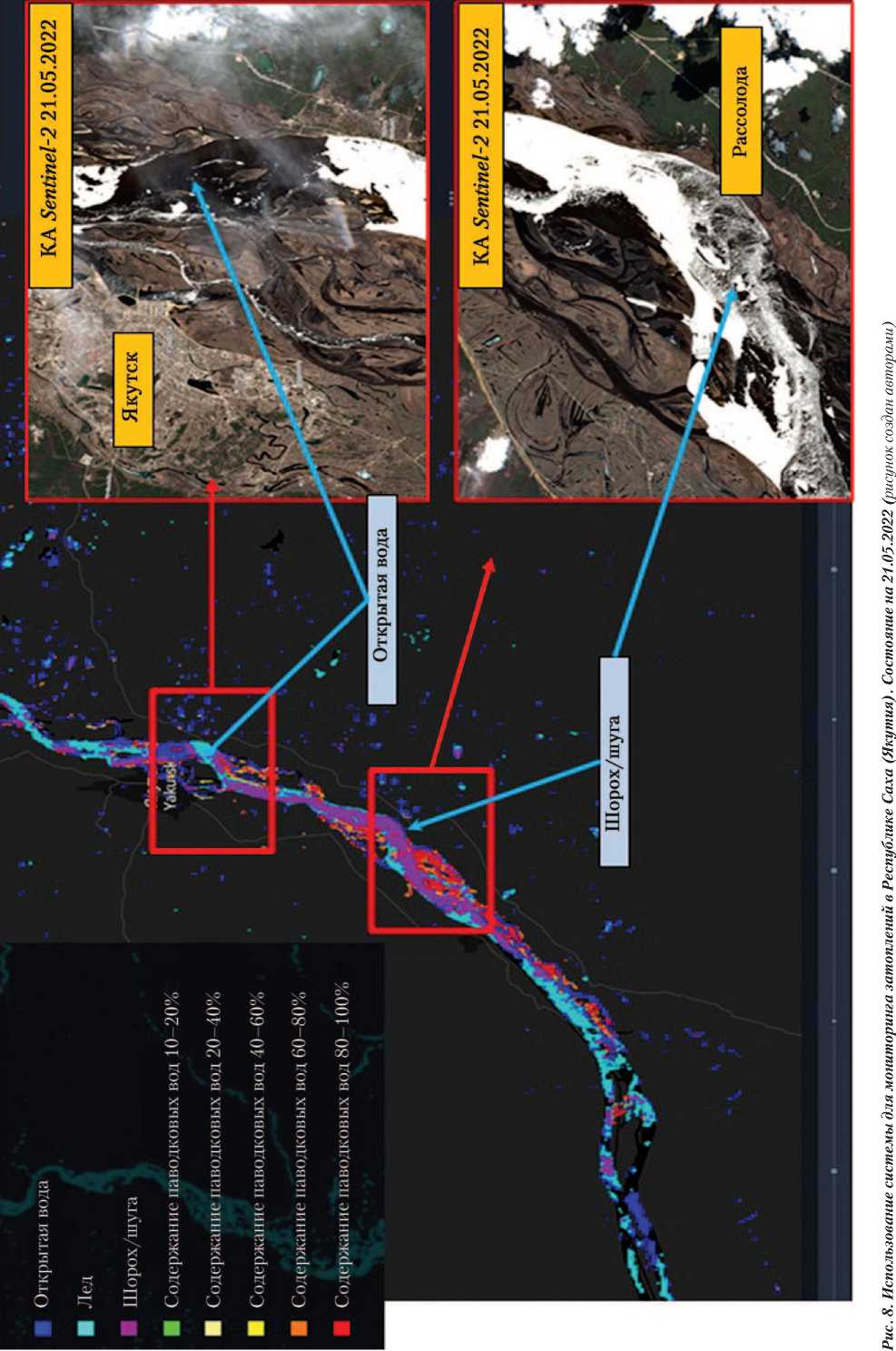
Информационная система, представленная в данной статье, была интегрирована в информационной системе «Атлас опасностей и рисков» МЧС России. Применение системы позволило осуществлять мониторинг гидрологической обстановки на территории Российской Федерации в режиме времени, приближенном к реальному. Помимо этого, опыт использования информационной системы показал точность классификации данных, получаемых с сенсора VIIRS . Общий вид отображения результатов обработки в геопортале представлен на рис. 7. На рис. 8, 9 представлены примеры использования системы для мониторинга затоплений в Республике Саха (Якутия) в мае 2022 г., а на рис. 10, 11 — затоплений в Рязанской области в апреле 2023 г. (для подтверждения точности предлагаемого метода применялись данные с КА типа Sentinel-2 и Landsat-8/9 ).
Примеры были подобраны таким образом, чтобы продемонстрировать возможности предлагаемого авторами подхода для мониторинга различных стадий опасных гидрологических событий в разных климатических зонах Российской Федерации. Кроме этого, в примерах использовались космические снимки с разных космических аппаратов, имеющих различное пространственное разрешение, подобранные с учётом географического места расположения зоны интереса и различий окружающей местности. Это позволило объективно оценить возможности предлагаемого подхода.
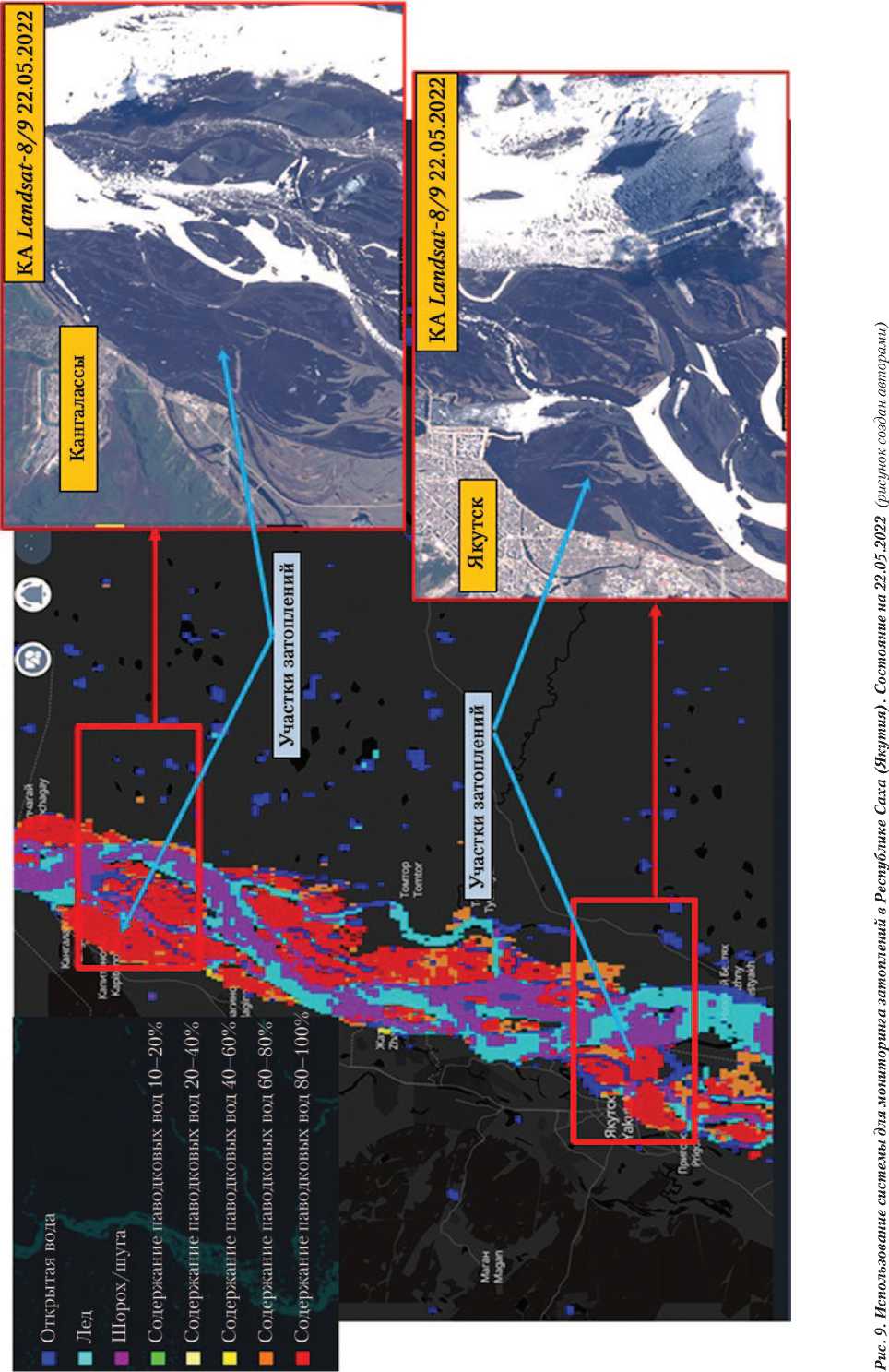
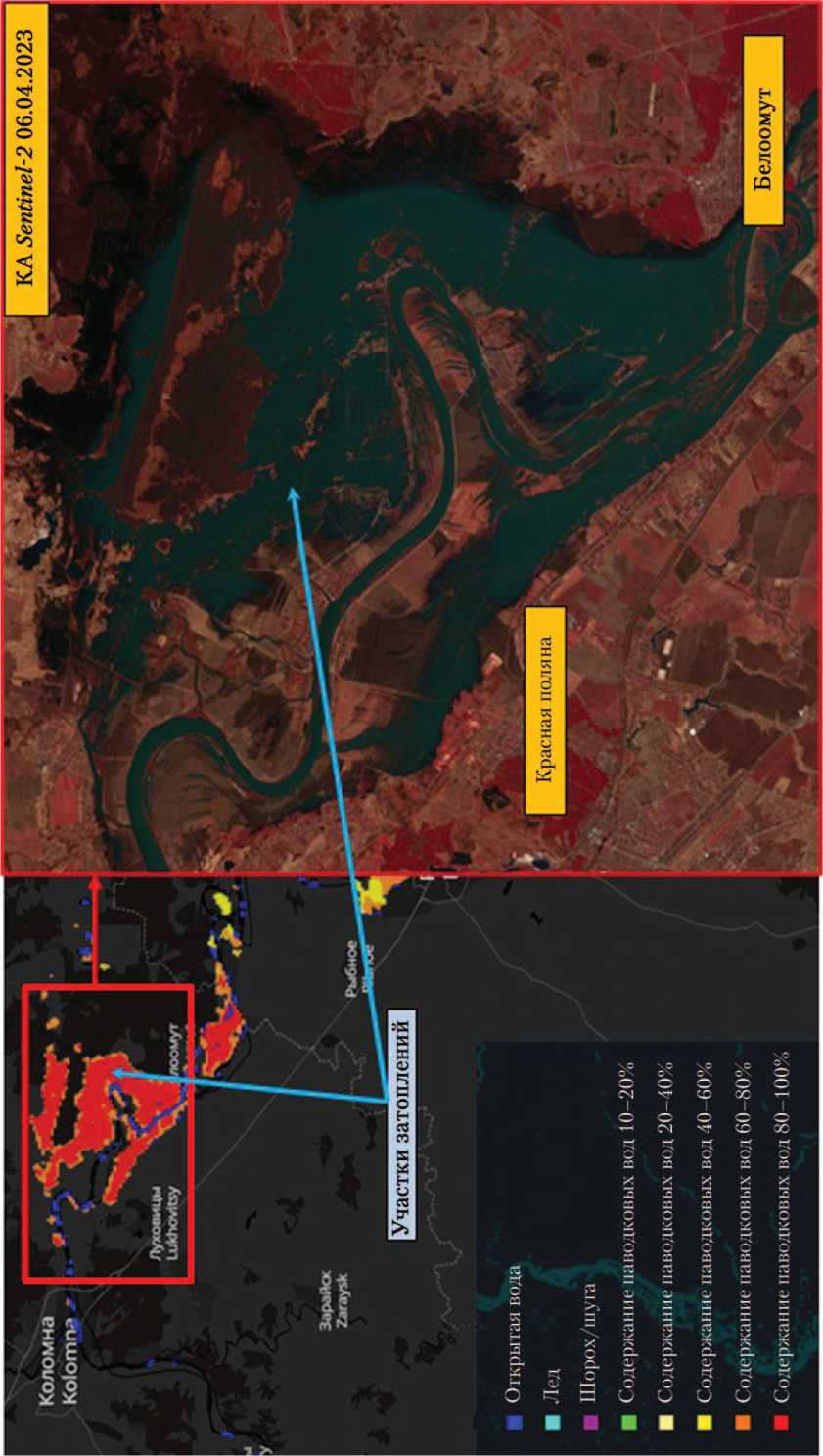
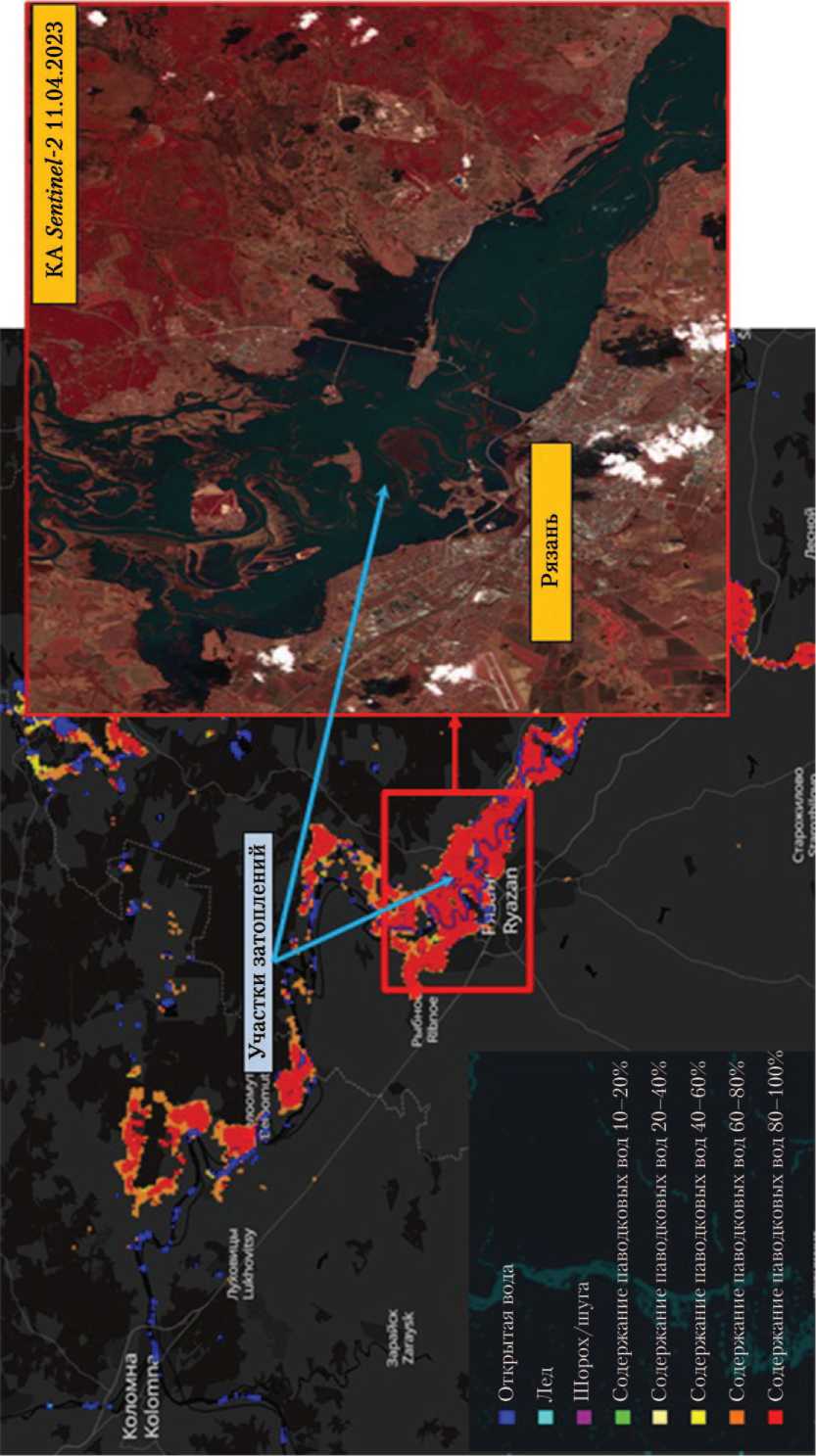
На представленных рисунках на- блюдается высокая точность классификации паводковых вод. Помимо этого, был проведён сравнительный анализ с данными, полученными с сенсора MODIS. Результаты проведённого анализа приведены в табл. 1.
N – N p = oa----l. 100%; (18)
F N
total
P t =
N t
N to tal + N u
■ 100%;
N
Po = N + uN . 100%, (20) tu где Pf — коэффициент ложного обнаружения; Pt — коэффициент точности обнаружения; Po — коэффициент пропуска/необнаружения; Ntotal – общее количество пикселей паводковых вод; Nt — количество истинных пикселей паводковых вод; Nu — количество пропущенных пикселей паводковых вод.
Авторами проведён анализ времени выполнения процесса обработки данных ДЗЗ с использованием предлагаемого подхода. В табл. 2 и 3 представлены показатели самых ресурсоёмких процессов (детектирования и векторизации соответственно).
Результаты сравнительного анализа данных, полученных с сенсоров MODIS и VIIRS
Таблица 1
|
Наименование сенсора |
Дата |
N total |
N t |
N u |
Pf , % |
Pt , % |
P o , % |
|
MODIS |
21.05.2022 |
268 956 |
56 289 |
25 638 |
79,07 |
19,11 |
31,29 |
|
22.05.2022 |
250 951 |
52 698 |
21 896 |
79,00 |
19,31 |
29,35 |
|
|
06.04.2023 |
230 735 |
49 897 |
34 162 |
78,37 |
18,84 |
40,64 |
|
|
11.04.2023 |
198 351 |
47 698 |
19 276 |
75,95 |
21,92 |
28,78 |
|
|
Средние значения: |
78,10 |
19,80 |
32,52 |
||||
|
VIIRS |
21.05.2022 |
37 964 |
36 975 |
128 |
2,61 |
97,07 |
0,34 |
|
22.05.2022 |
56 927 |
54 967 |
281 |
3,44 |
96,08 |
0,51 |
|
|
06.04.2023 |
68 924 |
66 985 |
249 |
2,81 |
96,84 |
0,37 |
|
|
11.04.2023 |
72 659 |
69 894 |
328 |
3,81 |
95,76 |
0,47 |
|
|
Средние значения: |
3,17 |
96,44 |
0,42 |
||||
Примечание : Ntotal — общее количество пикселей паводковых вод; Nt — количество истинных пикселей паводковых вод; Nu — количество пропущенных пикселей паводковых вод; Pf — коэффициент ложного обнаружения; Pt — коэффициент точного обнаружения; Po — коэффициент пропуска/необнаружения.
Таблица 2
Показатели детектирования
|
Параметр |
Время выполнения, ч |
Время выполнения, мин |
Время выполнения, с |
|
Минимальное время |
0,06 |
3,88 |
232,80 |
|
Максимальное время |
1,05 |
62,81 |
3 768,60 |
|
Медиана |
0,51 |
30,41 |
1 824,60 |
|
Среднее арифметическое |
0,44 |
26,54 |
1 592,41 |
|
Среднее отклонение |
0,239109838 |
14,35124857 |
861,0749139 |
|
Дисперсия |
0,070844271 |
255,0753991 |
918 271,4367 |
|
Стандартное отклонение |
0,266165872 |
15,97108008 |
958,2648051 |
Показатели векторизации
Таблица 3
|
Параметр |
Время выполнения, ч |
Время выполнения, мин |
Время выполнения, с |
|
Минимальное время |
0,05 |
3,03 |
181,80 |
|
Максимальное время |
0,45 |
26,87 |
1 612,20 |
|
Медиана |
0,07 |
4,06 |
243,60 |
|
Среднее арифметическое |
0,07 |
4,24 |
254,60 |
|
Среднее отклонение |
0,009670937 |
0,581601245 |
34,89607468 |
|
Дисперсия |
0,000304716 |
1,077358281 |
3 878,489811 |
|
Стандартное отклонение |
0,017456108 |
1,037958709 |
62,27752252 |
Выводы
Бурное развитие информационных технологий, а также спутниковых группировок, позволяет создавать информационные системы для мониторинга различных явлений в квази-реальном времени. Автоматическое обнаружение наводнений показывает высокую точность обнаружения. Опыт практической реализации предлагаемого подхода показал, что совместное использование данных ДЗЗ и технологий обработки больших данных приводит к синергетическому эффекту при борьбе с таким масштабным стихийным бедствием, как наводнение. Высокая оперативность получения конечного тематического продукта обусловлена следующими факторами:
-
• использование данных, полученных в режиме прямого вещания;
-
• централизованная обработка в ЦОХД;
-
• использование программных продуктов из сферы больших данных.
Ввиду того, что для создания тематических продуктов мониторинга наводнений используются оптические данные сенсора VIIRS , невозможно гарантировать постоянное получение объективной информации для оценки складывающейся обстановки из-за наличия плотной облачности над зоной интереса. Помимо этого, для оперативного реагирования на возникающие изменения в обстановке требуется проводить визуальный анализ оперативных и ретроспективных данных, что требует дополнительного времени.
Для решения данных проблем и дальнейшего развития информационной системы авторы планируют реализовать следующее:
-
• автоматическое детектирование опасных зон;
-
• автоматическая загрузка и размещение на геопортале космических снимков высокого и среднего разрешения ( Sentinel-2 , Landsat-8/9 , «Кано-пус-В» и др.);
-
• совершенствование существующего алгоритма детектирования наводнений, а также внедрение алгоритмов детектирования наводнений на основе обработки радиолокационных данных ( Sentinel-1 , «Кондор-ФКА», «Обзор-Р» и др.);
-
• сбор набора данных о фактических зонах затоплений и реализация прогностической модели с использованием метеоданных и данных с гидропостов.
