Пользовательский интерфейс при расчете тока обмотки статора шагового двигателя

Автор: Е. А. Лыкова
Журнал: Современные инновации, системы и технологии.
Рубрика: Электроника, измерительная техника, радиотехника и связь
Статья в выпуске: 4 (4), 2024 года.
Бесплатный доступ
В ходе работы был создан пользовательский интерфейс для расчета тока обмотки статора шагового двигателя. Для его реализации была использована среда программирования LabView, состоящая из двух панелей. На лицевой панели представлен пользовательский интерфейс, а на панели блок-диаграммы находится функционал, реализующий работу пользовательского интерфейса. Такое разделение очень удобно для реализации поставленной задачи, ведь пользовательский интерфейс не перегружается расчётными данными. Более того, написание кода в виде блок схем также удобно для расчета тока обмотки статора шагового двигателя. Статор шагового двигателя состоит из нескольких пар обмоток, на которые необходимо последовательно подавать ток для перемещения ротора. Плавность вращения ротора шагового двигателя зависит от формы подаваемого сигнала, а его точность – от количества обмоток. В ходе работы с четырех фазным шаговым двигателем была выбрана форма треугольника. При ней наблюдалось наиболее плавное перемещение ротора. В созданной программе значение тока на одной из катушек выводится прямо на экран. Таким образом, созданная программа способно значительно облегчить получение данных значения тока на обмотке статора.
Шаговые двигатели, пользовательский интерфейс, среда программирования LabView, статор, ротор.
Короткий адрес: https://sciup.org/14131321
IDR: 14131321 | DOI: 10.47813/2782-2818-2024-4-4-0436-0443
Текст статьи Пользовательский интерфейс при расчете тока обмотки статора шагового двигателя
DOI:
Шаговые двигатели – электрические устройства, которые представляют собой синхронные бесщеточные электродвигатели [1]. Основными внутренними элементами шагового двигателя являются статор и ротор. Статор представляет собой несколько пар стационарных обмоток, на которые поочерёдно подают ток [2]. В зависимости на какую пару обмоток подан ток, к такой паре и притягивается ротор. Таким образом, обуславливается дискретное движение ротора от одной пары обмоток к другой. Преимуществом такого механизма является регулируемая скорость движения ротора, а также точность его перемещения.
Шагами вращения шагового двигателя называют части кругового оборота двигателя, на которых движется ротор [3]. Также шагом ротора называют его угол поворота за один импульс. Таким образом, шаг ротора зависит от количества пар обмоток статора, а его плавность движения от формы подаваемого тока на эти обмотки.
В настоящее время шаговые двигатели стали очень распространены при работе, где важна точность [4]. Именно поэтому создание пользовательского интерфейса для таких распространенных приборов я считаю актуальной темой для исследования.
Пользовательский интерфейс позволит легко считывать данные для дальнейшей обработки, а также позволит взаимодействовать с оборудованием даже тем сотрудникам, которые не разбираются в принципе работы шаговых двигателей.
МАТЕРИАЛЫ И МЕТОДЫ
Исследуем возможность выполнить реализацию пользовательского интерфейса с использованием программы LabView. Данный информационный продукт использует графический язык программирования, что удобно при описании последовательности действий. Также LabView имеет две панели: лицевую и блок-диаграмму [5]. Лицевая панель отображает пользовательский интерфейс, а использование панели блок-диаграммы позволяет реализовать функционал. Таким образом кнопки будут отображаться на лицевой панели, а их взаимосвязь и все операции будут реализованы в панели блок-диаграммы.
РЕЗУЛЬТАТЫ
Попробуем создать простую программу, которая будет анализировать два входных состояния и формировать четыре выходных сигнала, по которым можно будет определить дальнейшее состояние шагового двигателя. С помощью двух входных состояний можно будет задать четыре выходных, а именно: 00 – сброс, 01 – движение против часовой стрелки, 10 – движение по часовой стрелки, 11 – остановка в том положении, в котором находился шаговый двигатель. Для реализации будем использовать программное обеспечение LabView.
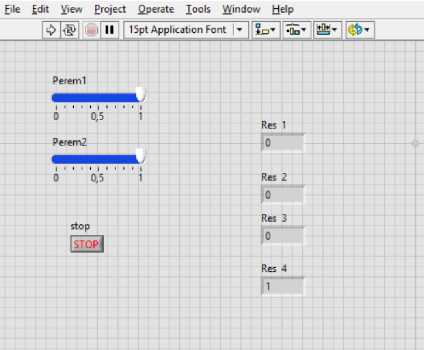
Рисунок 1. Лицевая панель.
Figure 1. Face panel.
Код лицевой панели представлен на рисунке 1. Код блок-диаграммы представлен на рисунке 2.
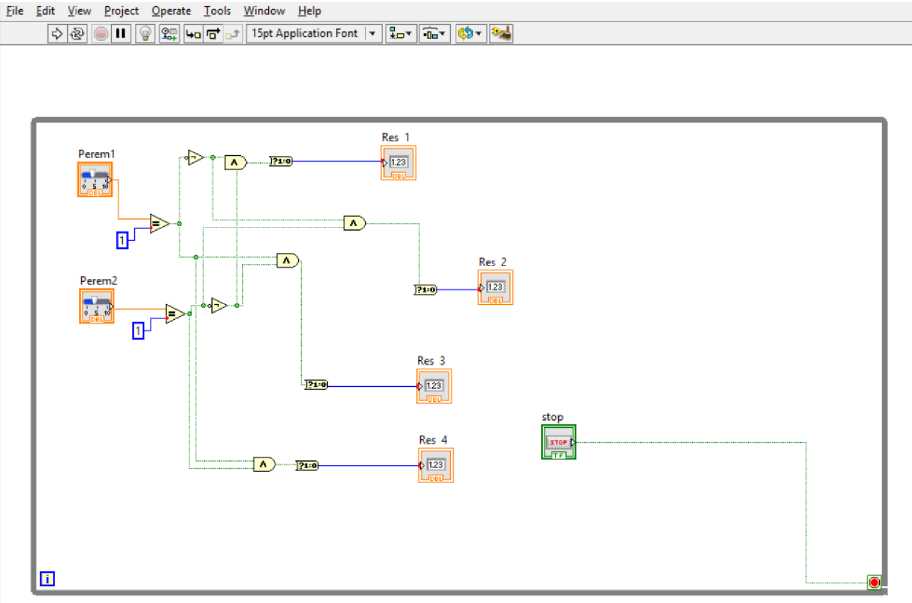
Рисунок 2. Блок-диаграмма.
Figure 2. Block diagram.
ОБСУЖДЕНИЕ
Таким образом, если на вход подан сигнал 00 – четвертый бит выходного сигнала равен 1. Если на вход подан сигнал 01 – второй бит выходного сигнала равен 1. Если на вход подан сигнал 10 – третий бит выходного сигнала равен 1. Если на вход подан сигнал 11 – четвертый бит выходного сигнала равен 1. Таким образом, анализ отдельных битов выходного сигнала можно в дальнейшем использовать для реализации различных состояний шагового двигателя. При запуске программы анализируется значение входных переменных с помощью логических функций «и» и «не» [6]. Программа выполняется до тех пор, пока не будет нажата кнопка STOP, и не произойдет выход из цикла. Результаты программы для различных ситуаций приведена на рисунках 3 – 6.
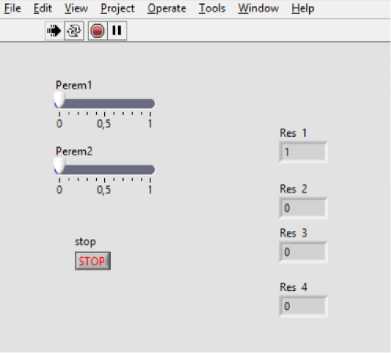
Рисунок 3. Результаты при 00 входном сигнале.
Figure 3. Results at 00 input signal.
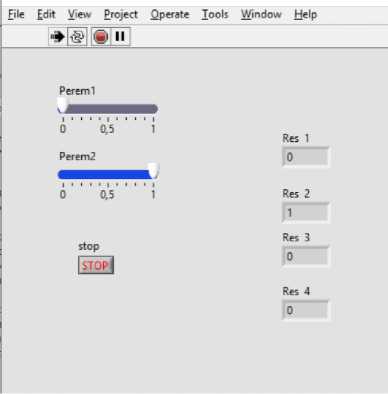
Рисунок 4. Результаты при 01 входном сигнале.
Figure 4. Results at 01 input signal.
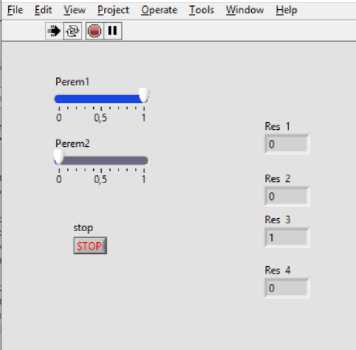
Рисунок 5. Результаты при 10 входном сигнале.
Figure 5. Results at 10 input signal.
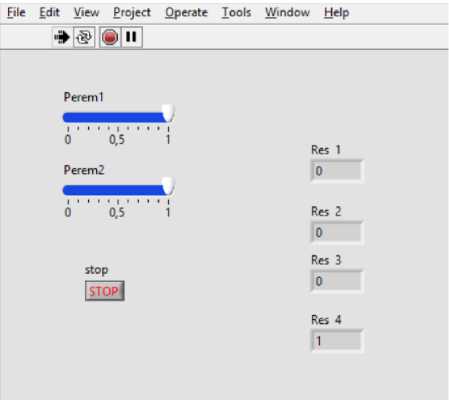
Рисунок 6. Результаты при 11 входном сигнале.
Figure 6. Results at 11 input signal.
ЗАКЛЮЧЕНИЕ
Таким образом, была создана программа с интерфейсом, понятным для пользователя, чтобы определять следующее состояние шагового двигателя. В дальнейшем эти значения можно использовать для продолжения развития функционала программы в среде программирования LabView. Значения направления движения необходимы для реализации перемещения ротора по часовой стрелки, против часовой стрелки, сброса или остановки.
В дальнейшем эта программа может стать основой программы по реализации движения шагового двигателя, который может находится в четырех состояний [7]. Движение по часовой стрелки и против позволяет перемещать рабочий орган. Состояние сброса позволяет перевести шаговый двигатель в состояние, которое было бы задано программистом. Состояние остановки позволят остановить двигатель в том же положении.
