Помехоустойчивость инвариантной системы передачи информации при наличии слабых корреляционных связей

Автор: Алгазин Евгений Игоревич, Ковалевский Артем Павлович, Малинкин Виталий Борисович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (21), 2008 года.
Бесплатный доступ
Рассмотрена инвариантная система обработки информации, основанная на синхронном детектировании. При расчете параметров этой системы принято допущение, что ближайшие отсчеты поднесущей аддитивно зашумлены помехой, отсчеты которой слабо коррелированы между собой. Проведено сравнение количественных оценок работы такой системы с количественными показателями известной инвариантной системы при некоррелированности отсчетов шума.
Помехоустойчивость, инвариант, инвариантная относительная амплитудная модуляция, вероятность попарного перехода, отношение сигнал/шум (помеха), коэффициент корреляции
Короткий адрес: https://sciup.org/148175750
IDR: 148175750
The noise immunity of the invariant system of information transmission in the presence of weak correlation contacts
The invariant system of information processing based on synchronous detection is considered. It is assumed that by the parameters estimation of such a system the nearest readings of the subcarrier are interfered with the additive noise; these readings are weakly correlated. The comparison of the quantitative estimation of such a system operation with quantitative indications of the known invariant system by non-correlation of noise readings is realized.
Текст научной статьи Помехоустойчивость инвариантной системы передачи информации при наличии слабых корреляционных связей
Инвариантные системы передачи информации учитывают свойства каналов связи и в этом смысле являются адаптивными. Положительные свойства таких систем наиболее полно проявляются при работе по каналам связи с переменными параметрами, где основным мешающим воздействием на сигналы является мультипликативная помеха. Временную динамику каналов с переменными параметрами можно условно разбить на интервалы стационарности, а затем рассматривать прием информацион ного и обучающего сигналов в пределах выделенных интервалов стационарности. В проведенных ранее исследованиях [1] аддитивная помеха рассматривалась как воздействие белого шума на отсчеты информационного и обучающего сигналов, что обусловливало вывод выражения плотности вероятности оценки инварианта.
Постановка задачи. Пусть мы имеем канал связи, ограниченный частотами^ wf. Состояние канала связи определяется интервалом стационарности, внутри кото- рого действие мультипликативной помехи описывается постоянством коэффициента передачи ЦЦ на некоторой частоте.
Алгоритм приема зависит от несущей частоты, задаваемой как средняя частота канала, и поднесущей, которой модулируется несущая.
Предполагается, что собственные шумы генераторного оборудования ничтожно малы и их величиной можно пренебречь.
Каждый передаваемый блок будет содержать информационную часть и пилот-сигнал (последовательность обучающих сигналов 5 б). Как показано в [1], оптимальное соотношение между длительностями информационной части и пилот-сигнала должно быть равно 3/2. При этом наблюдается уменьшение относительной скорости передачи на 40 %.
На приемной стороне обучающие сигналы усредняются и используются для демодуляции информационной части блока. При этом из-за изменения параметров канала связи информационные и обучающие сигналы зашумлены аддитивной помехой. В данной статье предполагается, что ближайшие отсчеты аддитивной помехи слабо коррелированы между собой.
Необходимо произвести расчет вероятности попарного перехода инвариантов в такой системе для чего найдем аналитической выражение плотности вероятности оценки инварианта.
Решение поставленной задачи. Для уменьшения влияния аддитивных шумов канала связи воспользуемся известным способом - операцией усреднения произведения обучающего и опорного сигнала. Проведем расчет помехоустойчивости предложенным методом.
Исследуемая модель состоит из расширенного синхронного детектора. В качестве опорного сигнала генераторного оборудования используется сигнал вида
S ( г) = A sin (2л/п • Ai • z), где А - амплитуда;^ - частота колебаний поднесущей; Ai - интервал дискретизации; z - номер отсчета, z О {1,..., 7V}.
Представим обобщенную структуру обработки информации с усреднением (рис. 1). На первый вход умножителя с разделением по времени идут информационный и обучающий сигналы. На второй вход умножителя поступает опорный сигнал, который прошел спецвычис-литель и систему ФАПЧ. После такой процедуры на интервале стационарности оценка инварианта на выходе ОЗУ может быть рассчитана по следующему выражению:
£(AINVz-S(zM(z))-S(z)
INV* = I1N --So6. (1)
A(j) + ti(zm,j))-S(j)
Здесь в числителе - сумма А произведений мгновенных отсчетов сигнала информационной посылки и отсчетов опорного сигнала генератора. Информационный сигнал образован поднесущей вида^ • INVZ- S(z) + ^(z), где ^(z) - зашумляющая помеха. В знаменателе - сумма N мгновенных отсчетов сигнала обучающей посылки, образованного поднесущей вида к - S^- S(j), зашумленных помехой pQnjy
Оценка инварианта INV—,* представляет собой частное соответствующих сумм, домноженное на величину So0. В выражении (1) к • INVZ- S(z) - z-й мгновенный отсчет сигнала информационной посылки, поступающей из канала; k-S^- S(j) -j-й мгновенный отсчет сигнала обучающей посылки, поступающей из канала; ^(z) - z-e мгновенное значение помехи в информационном сигнале; г\(т,Ц -j-e мгновенное значение помехи в т-й реализации обучающего сигнала; к- коэффициент передачи канала; INVZ - /-й заданный инвариант; So6 - значение обучающего сигнала.
£INV/S(zM(z)
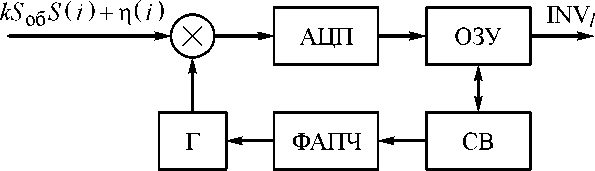
Рис. 1. Структурная схема обработки информации с усреднением: АЦП - аналого-цифровой преобразователь;
ОЗУ- оперативное запоминающее устройство;
СВ - спецвычислитель; ФАПЧ- система фазовой автоподстройки частоты; Г- генератор опорного сигнала
Без ограничения общности полагаем, что So6 = 1. Если S^ Ф 1, то все исходные параметры IN Vz, ст (среднеквадратическое отклонение помехи x(z), т\(тцУ) можно масштабировать, разделив на So6. Тогда формула (1) перепишет ся в виде
INV*
^(^•INVz-S(z) + ^(z)).S(z)
Z=1__________________________________________________________ i L N
4Y^k-SU) + ^iMlW^
^ m } y'=l где через А и В обозначены числитель и знаменатель дроби.
Будем полагать, что случайные величины ^(z) и г\(т,Ц одинаково распределены по нормальному закону с нулевым математическим ожиданием и дисперсией ст2. Кроме этого, предположим, что в каждом блоке зависимы только соседние случайные величины. Тогда corr ( ^ (z), ^ (z — 1) ) =
= corr(r|(zw,j),T|(zw,J-l)) = r’ где г - коэффициент корреляции.
Все остальные случайные величины, входящие в каждый принимаемый блок, будем считать независимыми.
Для реализации этой модели необходимо, чтобы Ы<1Д/2 .
Действительно, если Д1), ^(2), ^(3) имеют стандартное нормальное распределение £х(1)^(2) = г, £^(2)^(3) = г, £Ж(3) = 0,то
^(l) = ^(2) + Vl-r2Vi, ^(3) = г^(2) + С1\|/1+С2\|/2, где Ср С2 - константы; \|/ \|/ независимы и имеют стандартное нормальное распределение. Но
£^(l)^(3) = r2+C1Vl-r2 =0,
Е(^{зУ =г2 +С^ +Cl=\.
Следовательно, у 2
г2+С2<1, г2 +-^=<1, Vl-r г2 (1 — г2 ) + г4 <1-г2, у2<1-у\ 2г2 <1, г2 <\/2, \г\<\/42.
Воспользуемся известным подходом к оценке вероятности попарного перехода, описанным в [2]:
Zp оо
Рпер=Рг ^W2(z)dz + P2 [^(z)^, (3)
О Zp где Рпер - вероятность перехода INV1 в INV2 и наоборот; Р - вероятность появления INV ; Р - вероятность появления INV2; первый интеграл - вероятность появления INV2, когда послан INVj второй интеграл - вероятность появления INVp когда послан INV2; Z^ - пороговое значение, необходимое для вычисления Рпер: при известных Р и Р оно определяется с помощью наилучшей байесовской оценки путем минимизации Рпер по Z^ при неизвестных Рх и Р2 выбираем РХ=Р2 = 0,5.
Анализ (3) показывает, что для вычисления Р необходимо знать аналитические выражения GG) и W2(z) плотности вероятности оценки инварианта.
На основании выражения (2) вычислим математические ожидания и дисперсии случайных величин А и В [3]:
- математическое ожидание числителя z/z,-^-1НУ,у.8'2(/) = ^-^У,а, (4)
где a = ^S2 G);
- математическое ожидание знаменателя
N тв = k^S2 U^-k-a. (5)
Z=1
-
- дисперсия числителя будет равна [3]:
о2 = ^2)(T-INV,-S(z) + ^(z))S(z) +
Z=1
+9yrnvr(^INV,.S(z) + ^(z))S(z); )
^ ((^-INV;-S(z + l) + ^(z + ))S(z + l)J
= ^S4M +
Z=1
+2^ S(z)S(z + l)cov(^(z),^(z + l)) = Z=1
= <72a + 2rcr^^S(z")S(z' + l) = o|(a + 2rZ>), (6)
где /> = У S(z)S(z + l); а = У S2(z); cov(^(z),^(z + l)) = Z=1 Z=1
= 2ro ^ ^S(0S(i3-l) = 2уЬ, здесь у - коэффициент кор- Z=1
реляции, cj: - дисперсия помехи;
-
- дисперсия знаменателя
= Ц 2^^k.SU) + ^BysU?\ =
V L 7=1 Z=1 j
=-о(ул(ь08О?\=
L ) (7)
=2^a^a+2ra^b).
Расчет частного двух случайных величин производится по формуле [3]
оо (zx-mAf (x-mBf ffl(z) = [---------е 2^А е 2^в \x\dx, (8)
где су и су, определяются по выражениям (6) и (7), тА и тв - по выражениям (4), (5).
Отметим, что в формуле (3) при расчете ^(z) используется INVp а при расчете W2(z) - INV2. Значение вероятности попарного перехода Рпер находится методом численного интегрирования. Число накоплений с усреднениями равно 40 [ 1 ].
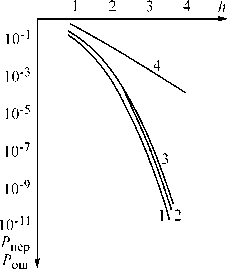
Полученные данные ограничены первыми шестью парами сравниваемых инвариантов, когда INV1 = 1, INV2 = 2; 3; 4; 5; 6; 7 (рис. 2).
Вероятность попарного перехода вычисляется при значениях отношения сигнал-шум И, которое находится по формуле, определяемой отношением мощности сигнала к мощности шума:
Пороговые значения Z^ отыскиваются минимизацией Р^ в формуле (3).
Для k = 1, г = 0,7 и INV1 = 1, INV2 = 2; 3; 4; 5; 6; 7 вычисления дают2 = 1,603; 2,038; 2,472; 3,046; 3,505; 3,963. Для к= 0,7, г = 0,7 и INV1 = 1, INV2 = 2; 3; 4; 5; 6; 7 получаем Z =1,764;2,176;2,587;2,999;3,411;4,041(см.кривыеЗнарис.2). Р J^k=\,y = Qn INV1 = 1;INV2 = 2; 3;4; 5;6; 7вычисления даютТ? = 1,603; 2,03 8; 2,472; 3,046; 3,505; 3,963. Для к = 0,7, г = 6 и INV1 = 1, INV2 = 2; 3; 4; 5; 6; 7 имеем Z =1,764;2,176;2,587;2,999;3,411;4,041(см.кривые2нарис.2).
1 2 3 4 5 6 h
гпер а б
Рис. 2. Кривые вероятности попарного перехода при к = 1 (а) и к = 0,7 (б) INVT = 1; INV2 = 2; 3; 4; 5; 6; 7: кривая 1 соответствует случаю, когда аддитивная помеха представлена некоррелированными отсчетами; кривая 2 - случаю, когда отсчеты сигнала зашумлены аддитивной помехой со слабой корреляцией соседних отсчетов при г = 0; кривая 3 аналогична кривой 2, но при у = 0,7; кривая 4 соответствует случаю классической амплитудной модуляции
Если в формулах (6) и (7) положить, что г = 0, т. е. отсчеты шума некоррелированы, то общее выражение плотности вероятности оценки инварианта, полученное авторами, переходит в известное соотношение по расчету аналогичного параметра [1]. Однако выражение плотности вероятности, представленное в данной статье является уточняющим и наиболее полно отражает реальную ситуацию.
Особенностью любой инвариантной системы, основанной на принципе инвариантной относительной амплитудной модуляции, является то, что по каналу передаются амплитудно-модулированные сигналы, образованные INV, и 5 Передача этих сигналов обеспечивается на основе классических алгоритмов обработки информации и имеет невысокую помехоустойчивость.
Кривая 4 на рис. 2 соответствует вероятности ошибки Р" , являющейся аналогом вероятности попарного перехода Рпер и рассчитываемой по известным формулам [2]. И только после обработки этих сигналов в соответствии с алгоритмом частного по выражению (1), можно получить оценку инварианта, по сути являющуюся числом, а не сигналом.
Вероятность попарного перехода в инвариантной системе определяется величинами 10 1... 10 ' '. При тех же значениях сигнал-шум вероятность ошибочного приема единичного символа в классических системах лежит в пределах 10 '... 10-7 (см. рис. 2).
Проведенный анализ инвариантной системы передачи информации показывает, что такая система при слабой корреляции отсчетов аддитивной помехи обладает высокой помехоустойчивостью, вероятность ошибки классического алгоритма с амплитудной модуляцией как минимум на два порядка больше вероятности попарного перехода в инвариантной системе. Поэтому данную систему следует использовать в телекоммуникационных системах, системах телеуправления и других системах, предъявляющих высокие требования к помехоустойчивости.
