Помехоустойчивость поиска широкополосных сигналов с минимальным сдвигом частотной манипуляции радионавигационной системы при воздействии структурных помех

Автор: Мусонов В.М., Романов А.П.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.23, 2022 года.
Бесплатный доступ
В представленной работе приведена оценка помехоустойчивости параллельного алгоритма временного поиска широкополосных сигналов с частотной манипуляцией при минимальном сдвиге. В качестве критерия используется пороговое значение h 2 отношения Сигнал/ Шум, приходящееся на один L-ичный сигнал, при котором обеспечивается требуемая точность кодовой синхронизации с заданной вероятностью ошибок. В этом случае задача поиска формируется как задача распознавания L сигналов, модулирующие кодовые последовательности { dkl } которых отличаются временным циклическим сдвигом τ k = ( k - 1) τэ ( k = 1, L , L - длина модулирующей кодовой последовательности, t э - длительность элемента сигнала или элемента модулирующей кодовой последовательности), равной энергии. Предварительно определяется L-мерная плотность вероятности модулей V 1 ,..., VL ( Vi - модуль корреляции анализируемого и опорного сигналов на выходе квадратурного коррелятора). Вероятность ошибки определяется путём L-кратного интегрирования L -мерной плотности вероятности модулей V 1,..., VL . Решена задача определения энергетических потерь в анализируемом сигнале при воздействии структурной помехи. При этом используется квадратурная схема распознавания одного из двух дискретных сигналов и определяется отношение Сигнал/ Шум на выходе схемы распознавания с учётом действия структурной помехи и производится сравнение с отношением Сигнал/ Шум для анализируемого сигнала, действующего на входе квадратурной схемы распознавания. Приведена оценка воздействия структурной помехи на временной поиск с учётом нормированной периодической автокорреляционной функции (НПАКФ) анализируемого сигнала и структурной помехи (при L = 16383). Показано, что наиболее рационально работать с НПАКФ на его восходящем участке (потактовый интервал [ 361τэ ,540τэ ]), при этом коэффициент взаимной корреляции не превзойдёт 4 · 10-3 и эквивалентные энергетические потери анализируемого сигнала составят не более 3 дБ. При интенсивности £ 34 дБ структурной помехи использование восходящего участка НПАКФ позволяет минимизировать энергетические потери анализируемого сигнала и проводить временной поиск за время £ 0,35 с (при τэ = 2,5 мкс).
Интенсивность помехи, отношение сигнал/ шум, помехоустойчивость системы поиска, коэффициент корреляции
Короткий адрес: https://sciup.org/148325795
IDR: 148325795 | УДК: 517.977.5-629.783 | DOI: 10.31772/2712-8970-2022-23-4-615-632
Noiseimmunity of the search for broadband frequency manipulation signals with minimal shift of the radio navigation system under the influence of structural interference
In the presented work, an assessment of the noise immunity of the parallel algorithm of the broadband signals with frequency manipulation with minimal shift time search is given. The threshold value of the Signal-to-Noise ratio per one L signal is used as a criterion, which ensures the required accuracy of code synchronization with a given error probability. In this case, the task of temporary search is formed as a task of recognition L signals whose modulating code sequences { dkl } differ by a time cyclic shift τ k = ( k - 1) τ э ( k = 1, L , L - the length of the modulating code sequence, tэ - the duration of the signal element or the element of the modulating code sequence) equal to energy. The L-dimensional probability density of the modules V 1,..., VL (Vi - the correlation module of the analyzed and comparison signals at the output of the quadrature correlator) is preliminarily determined. The probability of error is determined by L-multiple integration of the L-dimensional probability density of modules V 1,..., VL . The problem of determining the energy losses in the analyzed signal under the influence of structural interference is solved. In this case, a quadrature recognition circuit of one of two discrete signals is used and the Signal-to-Noise ratio at the output of the recognition circuit is determined, taking into account the effect of structural interference, and a comparison is made with the Signal-to-Noise ratio for the analyzed signal acting at the input of the quadrature recognition circuit. An assessment of the impact of structural interference on the temporary search is given, taking into account the normalized periodic autocorrelation function (NPACF) of the analyzed signal and structural interference (at L = 16383). It is shown that it is most rational to work with NPACF in its ascending section (cycle interval [ 361τ э ,540τ э ]), while the reciprocal correlation coefficient will not exceed 4 · 10-3 and the equivalent energy losses of the analyzed signal will not exceed 3 dB. At an intensity of 34 dB of structural interference, the use of an ascending section of the NPACF allows minimizing the energy losses of the analyzed signal and temporary searching for a time of 0.35 s (at τ э = 2.5 microseconds).
Текст научной статьи Помехоустойчивость поиска широкополосных сигналов с минимальным сдвигом частотной манипуляции радионавигационной системы при воздействии структурных помех
В радионавигационных системах (РНС) с широкополосными сигналами (ШПС) возможно воздействие взаимных и структурных помех, которые представляют собой ШПС такого же типа, что и используемые в широкополосных РНС – сигналы, излучённые опорными станциями (ОС) [1]. Приём сигнала бортовой станцией (БС) РНС может осуществляться в условиях воздействия помех в виде мешающих сигналов: сигналов поверхностных волн других ОС и сигналов пространственных волн тех ОС, которые удалены от БС на расстояния не менее 100 км с учётом рабочих частот. Для РНС «Спрут» с рабочей частотой ≃ 2 МГц на расстояниях до 1000 км воздействием пространственной волны можно пренебречь [2], тогда для РНС
«Спрут» с тремя опорными станциями число мешающих сигналов относительно приёма БС составит не более двух.
При использовании в качестве модулирующих псевдослучайных последовательностей циклические сдвиги кода, общего для всех опорных станций, показанные мешающие сигналы могут рассматриваться как помехи в виде копий полезного сигнала, циклически сдвинутые по времени. Когда в точке приёма БС мощности излучённых сигналов ОС приблизительно равновелики, то такие мешающие сигналы можно отнести ко взаимным помехам и анализ необходимого сигнала возможен на основе обычного кодового разделения [3]. В случае, когда мощность Ps анализируемого сигнала существенно меньше мощности P n мешающего сигнала ( K - 20 - 30 аА , K = 10 Lg ( P n I P s ) - интенсивность помехи), ОС мешающего сигнала расположена существенно ближе к БС, чем ОС анализируемого сигнала), то мешающий сигнал представляет собой структурную помеху (СП). Воздействие мощных структурных помех в форме широкополосных сигналов с ФМ на анализируемый ФМ сигнал подробно исследовано в работе [4].
В рассматриваемой РНС «Спрут» опорные станции расположены в вершинах равностороннего треугольника со стороной 300–400 км. Каждая из ОС излучает ШПС с частотной манипуляцией при минимальном сдвиге (ЧММС) [5], у которого модулирующий код { dnl } представляет собой циклически сдвинутую на n элементов исходную M -кодовую последовательность. При распространении сигналов между ОС над поверхностью моря на расстояние до 350 км происходит подавление сигнала на 34 дБ [2]. Отсюда мощность сигнала, излучаемого ближайшей ОС для БС будет превышать мощность сигнала, излучаемого от наиболее удалённой ОС для той же БС на 34 дБ. В этом случае сигнал sп ( t ) с наибольшей мощностью Pn , отличающейся от мощности Ps полезного сигнала s ( t ) на величину K интенсивности помехи, будет представлять собой структурную помеху sп ( t ) . Воздействие структурной помехи при поиске широкополосного сигнала с ЧММС на сегодня в литературе отсутствует, что явилось побудительным мотивом для анализа воздействия структурных помех на поиск ШПС – ЧММС сигналов опорных станций наземной РНС, позволяющего в значительной степени снизить влияние структурных помех на «поиск» широкополосных сигналов с ЧММС.
Помехоустойчивость параллельного поиска ШПС – ЧММС
Исполним алгоритм параллельного поиска [6] в форме выполнения оптимальной процедуры обнаружения и распознавания одного из L сигналов, отличающихся временным циклическим сдвигом т k = ( к - 1) т э ( к = 1, L , L - длина модулирующей кодовой последовательности, т э - длительность элемента сигнала или элемента модулирующей кодовой последовательности { dkl } ) [7]. Для оценки помехоустойчивости используем в качестве критерия вероятность правильного определения номера квадратурного коррелятора (КК), на выходе которого вычисленный модуль Vk корреляции анализируемого и опорного сигналов окажется наибольшим среди L - 1 значений. Отсюда вероятность правильного распознавания сигнала будет иметь место, если из всех значений модулей V 1 ,V 2,..., VL - 1 наибольшим окажется Vk . Следовательно, вероятность Р пр правильного распознавания сигнала есть вероятность того, что если V k = V max , то все остальные L- 1 значения ( V 1 ,V 2 ,...,V L , кроме Vk ) меньше V max , т. е. вероятность Р пр соответствует значению функции распределения модуля V k на интервале [0, +~ ] при плотности распределения f ( Vk ) модуля Vk :
то
Р пр = Р(V k = V max ) = J 0 f (V k ) dV k . (1)
Плотность распределения f ( Vk ) модуля V k корреляции можно выразить через L - 1 кратное интегрирование L -мерной плотности вероятности модулей V 1 ,..., VL - W ( V ) [8]:
Vk Vk f (Vk) = J ... J W(V)dV1... dVl ... dVL .
0 0 l * k
При действии флуктуационной помехи совместно с сигналом на входы L квадратурных корреляторов значения V1,V2,...,VL будут являться функциями от ортогональных сигналов. Можно сказать, что каждый из модулей будет являться независимой случайной величиной и тогда распределение W(V) можно выразить через произведение распределений независимых случайных величин (модулей) V1,...,VL . С учётом поведения основного выброса модуля норми- рованной периодической автокорреляционной функции (НПАКФ) [5] широкополосного сигна- ла при ЧММС
R (т) = ^
1 -
)
2 L э J cos

+—Sin π

IT ^ 2T э
0,
|T| > 2Tэ.
L -мерную плотность вероятности W ( V ) можно выразить через произведение:
– одномерной плотности W 1 ( Vk ) на выходе синхронного квадратурного коррелятора (где опорный сигнал по форме соответствует анализируемому сигналу) по закону Рэлея – Райса при 2
квадрате математического ожидания M ( V k ) = ET /2 ( E = AT /2 - энергия сигнала, A - амплитуда сигнала,
T = L тэ - длительность сигнала) и дисперсии а2 = D ( V ) = N o T / 4 модуля V k [7]
W i ( V k ) =
V k
D ( V )
<77 Л
Vk + M 2 ( Vk )
2 D ( V )
e V J
I o
( Vk M V ) ) = V k I УР У ) e- (Vk /^) - h 2 I
( D ( V ) J 7D V ) o
2 V k h
D ( V )
где I 0 ( * ) - модифицированная функция Бесселя нулевого порядка [9], 2 h 2 = M 2( V )/ D ( V ) = ( ET /2)/( N o T 14) - отношение Сигнал/ Шум на выходе КК при оптимальной корреляционной обработке сигналов в k -м квадратурном корреляторе;
– двух одномерных плотностей распределения модулей V τ на выходах соседних (относительно синхронного) в k + 1 -м и k - 1 -м квадратурных корреляторах (код модуляции в опорных сигналах сдвинут на ± т э ) по закону Рэлея - Райса при квадрате математического ожидания 22
M ( V T ) = PTR (т э )/2 ( с учётом НПАКФ (3)) и дисперсии а = D ( V ) квадратурных составляющих модуля V т с подстановкой u = V k 2 /2 D ( V ) получим
2 л Vk -
W 2 ( V ) = П--- [Ve
2 T | = | D ( V ) J т
V 2 + M 2( V т) R 2(т э )
2 D ( V )
V τ M ( V τ ) R (τ э )
D ( V )
dV т =
' _ V l
2 W) I o [ 2 hR (т э )V U ]
e [ u + h 2 R 2( т э )]
du
; (5)
- одномерных распределений W (Vl) на выходах остальных L - 3 квадратурных коррелято рах по закону Рэлея при дисперсии а2 = D(V)
L - 3 1 Vk
W 3 ( V ) = П---- [V/e 3 l У D ( V ) J l
Vl
2 D ( V )
V
у
L - 3 Vk 2/2D( V ) dV i = n J
I = 1 0
Vk 2
e" x dx = (1 - e 2D( V ) ) L - 3
.
Введя обозначения р = Vk I а, u = V т / а и интегрируя L - 3 кратное распределение Рэлея (5) по Vl / σ многомерное распределение W ( V ) для (2) запишем в следующей форме:
W ( V ) = W i (Vk )W 2 (V k ) W 3 ( V k ) =
V k D ( V ) D ( V )
I ( 2 V k h )
o D ( V )
( Vk I VD y ) 2 + h 2 e 2
V k 2
2 D ( V )
J
Io (2hR(τэ) u) du e (u+h 2 R 2(т э))
~ ""I L —3 ^k
1 - e 2D( V )
.
Тогда вероятность правильного обнаружения максимального модуля Vk квадратурным коррелятором с номером k при анализе принятого сигнала, с учётом (1)–(7) и замены переменных р - 212 ^ р будет определяться как
_ J I o [ 2 Vp h ] ’"= i "FT"
ρ
J
Io [2 JuhR(тэ)] ] r
2 2 n ] du Г 1 - e "P ] d P .
u+h2R2(тэ) I LJ eL ]
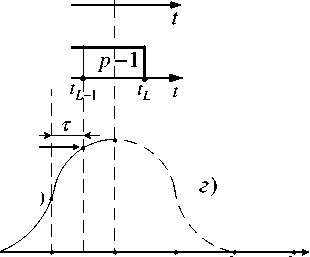
Формула (8) используется в предположении, что эквивалентная циклическая задержка τ l анализируемого сигнала может принимать значения, кратные 0,1тэ, 2тэ,...,( L- 1)тэ. В этом случае анализируемый и опорные сигналы синхронны относительно времени с точностью до τэ и по завершению поиска устанавливается идеальная кодовая синхронизация. Временные диаграммы, поясняющие синхронность анализируемого и опорного сигналов, приведены на рис. 1. В последнем случае, когда моменты tp (начало p элемента анализируемого сигнала sr ( t )) и to (начало действия опорного сигнала so ( t ) или обработки sr ( t ) сигнала) должны совпадать, то должно выполняться тождество t p = t 0 (рис. 1). Этому соответствует нулевая временная отстройка т = t p - t 0 = 0 опорного сигнала «синхронного» квадратурного канала относительно анализируемого сигнала (значение модуля Vk будет соответствовать максимуму НПАКФ, рис. 1, в ). Хотя вероятность такой «синхронности» практически равна нулю, но при имитационном моделировании можно задать условие t p = t 0 и определить вероятность ошибки синхронизации при заданном отношении Сигнал/ Шум. С учётом (8) вероятность ошибочного обнаружения максимального значения модуля квадратурным коррелятором с номером l ^ k будет р о = 1 - р пр .
При т = 0 выходу Vk квадратурного коррелятора с номером k соответствует максимальная вероятность правильного распознавания Р пр|т = 0 = P(Vk > V l ), l = 1, L - 1, l ^ k , которой соответствует вероятность ошибочного обнаружения
J
P o = 1 - J
I o [ 2VP h ] p + h 2 ] e L ]
ρ
J
Io [2 JuhR (тэ)] ] r
Г 2 2 и ] du [ 1 - e "P ] d P •
I u+h2R2(тэ )l LJ eL ]
В случае, когда ошибка синхронизации т может оказаться равной значению ± тэ 12 - это наименее благоприятный случай и по завершении «поиска» погрешность кодовой синхронизации может составить ± тэ. В этом случае выходы Vk-1, Vk и Vk+1 квадратурных корреляторов (с номерами k -1, k и k +1), при опорных сигналах с соответствующими временными отстройками тэ 12 , -тэ 12 и -3тэ 12 относительно анализируемого сигнала, определяются соот- ветственно значениями основного выброса НПАКФ (3) как R(-тэ /2), R(тэ /2) и R(3тэ /2). При этом вероятность ошибки распознавания можно определить посредством учёта в распределениях W1(p), W21(p) и W22(p) значений НПАКФ R(тэ /2), R(-тэ /2) и R(3тэ /2) соответственно. В силу чётности НПАКФ (3) относительно τ распределения W1 (ρ) и W2.1 (ρ) будут совпадать по форме. При «поиске» с момента to ошибке синхронизации соответствует значение т = to - tp . Момент to относительно момента tp (временной координаты максимума основного выброса НПАКФ сигнала) можно рассматривать как случайную величину, распределённую равномерно на интервале [- тэ /2,+тэ /2]. В этом случае условные вероятности правильного обнаружения при временной отстройке т = + тэ /2 и при временной отстройке т = -тэ / 2 (в силу чётности НПАКФ относительно τ ) будут одного значения. Тогда полная условная вероятность правильного обнаружения будет определяться через удвоение и условная вероятность ошибочного обнаружения максимального модуля квадратурным коррелятором с номером к при «поиске» с конечным значении временной отстройки т = |тэ / 2| принимает следующий вид:
P 0.5τ э
= 1 -
то
2J
I o ( 2TP hR (т э /2) ) ( р + h 2 R 2( т э /2) ) e
р I o ( 2 VUhR ( - т э /2 )
J ( u + h 2 R 2( - т э /2) )
0 e
р I o ( 2^ hR (Зт э /2 )
J ( u + h 2 R 2 .3т э /2) ) dU ( 1 - e
0 e _
L - 3
■ -р ) d р.
а )
sr ( t )
^ г + 1 ( t )
iii
p i t p
p +1 i i i
L -1
L
iii
б )
[V T )
в )
p i t 0
i i R ( T ) [
\ । i R ( Т э )
I I >I\ T p
p +1 i t 1
i i i L -1
L
0 т 2т 3т э ээ
R (-Т э )
iii p-1 p i i i
I R (-Т э + т )
t
( L - 2) т э ( L - 1) т э Lт э
T 2т 3т э ээ
Рис. 1. Эпюры анализируемого sr ( t ) и опорного s 0 ( t ) сигналов
Fig. 1. Time diagrams of analyzed sr ( t ) and comparison s 0 ( t ) signals
Формулы (9) и (10) определяют вероятность ошибки в двух крайних случаях: ошибка синхронизации т = 0 и |т| = тэ /2 соответственно. Учитывая случайный характер параметра т , целесообразно определить среднее значение вероятности ошибки, полагая случайную величину τ равномерно распределённой на интервале [ - тэ /2, + тэ / 2]:
2 т э 7 I o [ 2 Ур hR (т) ] ср ' - т э i J 0 e [-+ h 2 R 2 'I
p Io |^2 4uhR (т + т э ) ]
J e [ u + h 2 R 2(т + т э ) ]
du
P. I o [ 2 4uhR (т - т э ) ]
J [ u + h 2 R 2(т - т э ) ]
du
L - 3
||1 - e P ] dp
d τ
На рис. 2. представлены графики зависимости вероятности ошибки P o, Р ср, P o 5 т э от отношения Сигнал/ Шум h 2 при L = 214 - 1 = 16383, рассчитанные по формулам (9)-(11). График 1
построен для вероятности Po и соответствует синхронному поиску при отсутствии ошибки синхронизации (т = 0). График 2 построен для средней вероятности ошибки Р ср и соответствует «поиску» при возможной случайной временной ошибке равномерно распределённой на интервале [ - тэ /2, + тэ /2]. График 3 построен для вероятности Р 0 . 5т э при «поиске» с ошибкой |т| = тэ /2 синхронизации. Согласно рис. 2 (графики 2-3) с практической целесообразностью наиболее приемлемо проводить поиск с вероятностью ошибки не хуже 1*10–3 при отношении Сигнал/ Шум h 2 = 15 ^ 16 дБ.
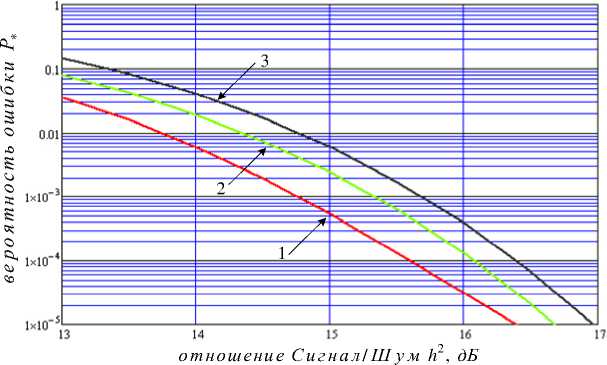
Рис. 2. Зависимости вероятности ошибки от отношения Сигнал/ Шум
1 - т = 0; 2 - {т} = (-т э /2,+т э /2); 3 - |т| = т э /2
Fig. 2. Dependence of the error probability on the Signal-to-Noise ratio
1 - т = 0; 2 - {т} = (-т э /2,+т э /2); 3 - |т| = т э /2
Метод расчёта энергетических потерь анализируемого сигнала при действии СП
Помехозащищённость алгоритма поиска бортовой станции сигнала s ( t ) при совместном воздействии структурной sn ( t ) и флуктуационной помехи ξ( t ) исследуем посредством схемы оптимального двоичного распознавания ортогональных сигналов с неизвестной фазой.
Как известно [7], распознавание одного из двух дискретных сигналов (модулирующий код каждого из сигналов отличается на такой циклический сдвиг n min , при котором коэффициент взаимной корреляции R mi n( n min т э ) равен минимальной величине R min = 1/ L ) со случайной фазой в присутствии флуктуационной помехи производится посредством схемы, приведенной на рис. 3.
Схема распознавания включает в себя две пары синфазных и квадратурных корреляторов Ki и K q действующих на едином временном интервале {t } = 0, T ( T = тэ L ):
– для вычисления составляющих Yk и Y ˆ k модуля Vk корреляции принятой реализации в форме s ( t ) + s n ( t ) + ^( t ) и опорного сигнала s o k ( t ), вычислитель B k модуля V k .
s ( t ) - анализируемый сигнал [9] в форме
L
s ( t ) = A Z rect [ t — ( l — 1)т э ]cos [ 2л ( d ki f + d^f ) t + n( b k! © Dr ) ] , (12)
i = 1
Здесь A - амплитуда; f н (в) - манипулируемые нижняя (верхняя) частоты; dkl е {0,1} и bkl е {0,1} - двоичные символы, принадлежащие циклически сдвинутой на к элементов исход- ной M -кодовой последовательности и соответствующие частотной и фазовой манипуляции l элемента сигнала; Dr - информационный символ, соответствующий дополнительной фазовой манипуляции.
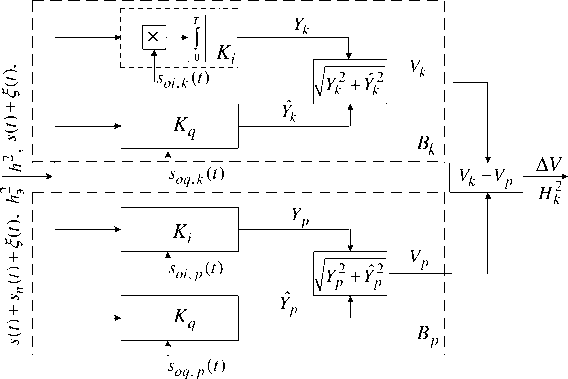
Рис. 3. Структурная схема распознавания ШПС-ЧММС сигналов
Fig. 3. Block diagram of ВВS-MSK signal recognition sn (t) - структурная помеха в форме сигнала, действующего от ближайшей опорной станции:
s n ( t) = A n Z rect [ t - ( l - 1)т э ]cos [ 2n ( d nl f н + d nl f 3 ) t + n( bnl ® D n ) ] , (13)
здесь A n - амплитуда; f н (в) - манипулируемые нижняя (верхняя) частоты; dnl е {0,1} и bnl е {0,1} - двоичные символы, принадлежащие циклически сдвинутой на n элементов исходной M -кодовой последовательности и соответствующие частотной и фазовой манипуляции l элемента сигнала; Dn - информационный символ, соответствующий дополнительной фазовой манипуляции.
^( t ) - флуктуационная помеха с равномерной (в полосе частот сигнала) спектральной плотностью мощности No .
s o k ( t ) - опорный сигнал, действующий в синхронном квадратурном корреляторе:
s o к ( t ) = A o Z rect [ t - ( l - 1)т э ]cos [ 2n ( d kl f н + d kl f в ) t + n b kl ] , (14)
здесь Ao - амплитуда, можно принять равной 1;
-
– для вычисления составляющих Yp и Y ˆ p модуля Vp корреляции принятой реализации в форме s ( t ) + s n ( t ) + ^( t ) и опорного сигнала s o p ( t ), действующего в асинхронном квадратурном корреляторе, вычислитель Bp модуля Vp ;
-
– схему сравнения, по существу схему вычитания.
На рис. 4. представлены возможные диаграммы сигналов, действующих в схеме (рис. 3). Здесь sn (t) - сигнал действующей структурной помехи (13), в момент 10 начала анализа модулирующий код {dnl } соответствует циклически сдвинутой на n элементов исходной M -двоичной последовательности {dl} (для примера); so к (t) - опорный сигнал (14), в момент t0 начала анализа модулирующий код {dkl } соответствует циклически сдвинутой на k элемен- тов исходной M -двоичной последовательности {dl}; s(t) - анализируемый сигнал (12), в момент t0 начала анализа модулирующий код {dkl } соответствует циклически сдвинутой на k элементов исходной M -двоичной последовательности {dl}; so p (t) - опорный сигнал, в момент t0 начала анализа модулирующий код {dpl } соответствует циклически сдвинутой на p = nmin элементов исходной M -двоичной последовательности {dl}.
s n ( t ) • • П — 1
s o , к ( t ) • • к — 1
Т t o
S o , p ( t ) • • Р — 1
n
X
n + 1
ITT
• • • П — 1
к + 1 к + 2
k т =т a
• • • к — 1
s ( t ) • • к — 1
|
к |
к + 1 |
к + 2 |
• • • к — 1 |
|
• • •
t p +1 p + 2
• • • Р — 1
p
• • •
t
• • •
t
• • •
t
Рис. 4. Диаграммы сигналов, действующих в схеме распознавания
Fig. 4. Diagrams of signals acting in the recognition scheme
Ошибочное решение при распознавании одного из двух ортогональных сигналов имеет место тогда, когда разность Vk — Vp имеет отрицательный знак, хотя выход нижнего вычислителя Вp не содержит распознаваемого сигнала. На выходах синхронного Вk и несинхронного Вp вычислителей формируются модули Vk и Vp с математическими ожиданиями и дисперсиями M ( Vk ) , M ( Vp ) и D ( Vk ) , D ( Vp ) соответственно. Для надёжной передачи информации при фазовой модуляции с вероятностью ошибки не хуже 1*10–5 требуется отношение Сигнал/ Шум h = P тэ L / N o > 10 дБ ( P = A /2) — относительно сильный сигнал. При сильном сигнале можно аппроксимировать закон распределения модулей Рэлея – Райса нормальным законом. Тогда вероятность ошибки распознавания одного из двух сигналов можно определить как
P e = 1 — Ф ( Н к ), (15)
где Ф ( Нк ) — интеграл вероятности [10]; Н к — отношение Сигнал/ Шум на «выходе» схемы вычитания (рис. 3) определяется соотношением [11]:
н к = ( M ( Vt ) — M ( V p ) ) 2/ ( D ( Vt ) + D ( V p ) ) , (16)
где M ( V k ), M ( V p ) и D ( V k ), D ( V p ) – математические ожидания и дисперсии модулей Vp ( k ) на выходах синхронного В k и несинхронного В p вычислителей (рис. 3).
Также вероятность ошибки двоичного распознавания ортогональных сигналов, посредством некогерентной схемы (рис. 3), с энергией P τ эL сигнала при действии помехи ξ( t ) со спектральной плотностью No можно определить через отношение h 2 Сигнал/ Шум, используя известное выражение [7]
P e = e h /2 /2, (17)
где h2 = PтэL / No, отношение Сигнал/Шум, при котором на входе схемы (рис. 3) действует сигнал, длительностью τэ L. Приравняв (15) и (17), по значению Hk2 , можно определить эквивалентное отношение hэ2 Сигнал/ Шум на входе схемы распознавания ортогональных сигналов с помощью формулы h2 = -2Ln{2[1 -Ф(Hk)]} .
Действие на входе схемы (рис. 3) дополнительно структурной помехи sn (t) приведёт, с учётом (15) и (17), к вероятности ошибки распознавания, которая будет определяться теперь уже эквивалентным отношением hэ2 Сигнал/ Шум, вычисляемым выражением (18). Здесь отношение Сигнал/ Шум Hk2 на «выходе» схемы вычитания (рис. 3) будет теперь определяться воздействием помехи sn (t) . Отсюда, теперь можно определить и эквивалентные энергетические потери a hk=h2 - нк,
обусловленные совместным действием сигнала с отношением Сигнал/ Шум h 2 и структурной помехи sn ( t ) , приводящей к эквивалентному отношению Сигнал/ Шум h э2 в сигнале схемы вычитания (рис. 3).
Модули Vk и Vp в (16), как случайные величины, распределены по закону Рэлея – Райса с параметрами математического ожидания и дисперсии [12]
M ( V , ) = a^ F , ( h , 2) = =kl
f 23 ^
1 + t । к 2 У
o
fh 2 ^
t
к У
+ h i I, 21
f h2)
к
- н 2
D V ) = 2a2
f A?) 1+1
к 2 У
- M 2 V ),
где a - среднеквадратическое отклонение квадратурных составляющих модуля V , , отношение сигнал/шум на «выходах» квадратурных корреляторов:
h , 2 = [ M 2( Y , ) + M 2 (Y , )]/ a 2 = { M 2 [ Rki y , cos(ф) + ny ] + M 2 [ Rki y; sin(ф) + n y ]}/ ( N 0 T / 4) =
= R kt ( AT / 2)2 / ( N 0 T / 4) = 2 R PT / No = 2 R ^ 2 E / N o = 2 h 2 R ^ 2 ,
здесь Rk , - коэффициент взаимной корреляции анализируемого и опорного сигналов; Ir (*) - модифицированная первого рода функция Бесселя r порядка [9].
Дисперсия флуктуационной помехи в выходных сигналах корреляторов (модуля V )
D ( Y ) = a м 2 = LN 0Т э /4.
С учётом (16) и (20), для Hk 2 (16) с учётом (20) можно записать в форме
2 _( M V k ) - M V ) ) 2 _ 2 [ F k ( h 2) - F p ( h p ) ]
k " D ( V k ) + D ( V p ) " 4 , 2 ,2_ ПГ F2№2) + F2r,2)l .
1 4 + h k + h p 2 L F k ( h k ) + F p ( h p ) ]
На «выходе» синхронного коррелятора (рис. 3, Bk ) будут присутствовать два отклика – на анализируемый сигнал s ( t ) и на структурную помеху sn ( t ) , определяемые периодической автокорреляционной функцией (ПАКФ) сигнала s ( t ) и периодической взаимной корреляционной функцией (ПВКФ) сигналов s ( t ) и sn ( t ) . Совместно будет действовать также и отклик на флуктуационную помеху.
Математические ожидания для синфазной и квадратурной составляющих [7] модулей Vk ( p )
синхронного и асинхронного квадратурных корреляторов (рис. 3, 4, Bk и Bp ) могу быть записаны в форме
M ( yfc ) = PPTT TRkk (т) COS(to o T + ф) + V P 2 2 TR nk (T n ) COS(to o T n + Ф n ) M ( l k ) = PF2TTR kk (T) sin(to o т + ф) + PnP /j T TR nk (т n ) sin(to o т n + ф n ) М ( У р ) = Pp2T TR kp (T)COS(M o T + ф) + pi /j T TR np (t n )cos(to o T n + ф n )’ M (F p ) = pmTR kp (T)sin(M o T + ф) + P /J T TR np (T n )sin(to o T n + ф n )
где i - мощность анализируемого сигнала; i n = A n / 2 - мощность структурной помехи, Rkk (т) - коэффициент нормированной ПАКФ анализируемого сигнала s ( t ) c модулирующим кодом { dkl }, соответствующему циклически сдвинутой на k элементов исходной M -двоичной последовательности { d l } и опорного сигнала s o k ( t ) c модулирующим кодом { dkl }, соответствующему циклически сдвинутой на k элементов исходной M -двоичной последовательности { d l }; т - задержка начала действия k -го элемента опорного сигнала s o , k ( t ) относительно начала действия k -го элемента анализируемого сигнала s ( t ) (рис. 4); Rnk (т n ) - коэффициент нормированной ПАКФ структурной помехи sn ( t ) с модулирующим кодом { dnl }, соответствующему циклически сдвинутой на n элементов исходной M -двоичной последовательности { dl } и опорного сигнала so , k ( t ) C модулирующим кодом { dkl } , соответствующему циклически сдвинутой на k элементов исходной M -двоичной последовательности { dl } ; T n - задержка начала действия n -го элемента структурной помехи sn ( t ) относительно начала действия p -го элемента опорного сигнала so , p ( t ) (рис. 4); Rkp (T) - коэффициент нормированной ПАКФ анализируемого сигнала s ( t ) и опорного сигнала s o p ( t ) с модулирующим кодом { dp l }, соответствующему циклически сдвинутой на p элементов исходной M -двоичной последовательности { d l }; Rn p (т n ) - коэффициент нормированной ПАКФ структурной помехи sn ( t ) и опорного сигнала s o p ( t ); to o - циклическая центральная частота; ф и ф n - дополнительные набеги фаз [12], обусловленные параметрами трассы распространения поверхностной электромагнитной волны; cos( * ) и sin( * ) - корреляционные функции высокочастотных заполнений на центральной частоте.
Используя соотношения для тригонометрических функций [13], находим из (21) и (23) отношение Сигнал/ Шум в «выходе» синхронного квадратурного коррелятора Вк (рис. 3) в виде hk = { [ VPT2 TRkk (т) cos(tooт + ф) + VPn 22 TRnk (тn ) cos(tooTn + фn )]2 +
+ [ 4pTT TR kk T ) sin(to o т + ф) + ppT TR nk (т n ) sin(to o т n + ф n ))]2}/ ( N o T / 4) =
= 2 h 2 [ R 2 (т) + KR n2k (т n ) + 2 ^R nk (T n ) R kk (т) cos ( ф( t ) ) ] , (25)
где h 2 = ( PT 2/2)/( NoT /4) = 2 E / N o - отношение Сигнал/ Шум для анализируемого сигнала в «выходе» синхронного квадратурного коррелятора Вк; K = i n / i - интенсивность помехи;
cos[v( t )] = cos[to o (т - т n ) + ф - ф n ] (26)
- совместная корреляционная функция высокочастотного заполнения на центральной частоте to o .
Отношение Сигнал/ Шум в выходном сигнале (модуль Vp) несинхронного квадратурного коррелятора Вр (рис. 3.) можно определить посредством (20) и (23) и с учётом тригонометрических функций [13] получим h2 = { [ Vp?2 TRkp (т) cos(tooт + ф) + 4Рп 22 TRnp (Tn ) cos(tooTn + фn )]2 +
+ [ 4PT2 TR kp (т) sin(to o т + Ф) + J- T TR np (t n ) sin(® o т n + ф n )]2}/( NT /4) =
= 2 h 2 [ R 2p (t) + KR ^ (t n ) + 2 4KR kp (t) R^ (t n) cos ( V( t) ) ] . (27)
Согласно (25) и (27), отношения Сигнал/ Шум hk 2 и hp 2 определяются cos[ψ( t )] , где фазовый угол ψ( t ) (26) нестационарный случайный процесс [14] и учесть его значение в аппаратуре обработки принимаемых сигналов бортовой станцией практически невозможно. Область изменения ф( t ) составляет ± п, то верхней и нижней границам вероятности ошибки синхронизации при поиске будет соответствовать cos[^( t )] = ^1. Таким образом, при поиске отношения
Сигнал/ Шум hk2 и hp2 могут находиться в границах двух экстремальных значений, определяе- мых формулами h2 = 2h2 [Rkk ± VKRnk ]2 h2 = 2h2 [Rkp ± VKRp ]2
Оценка воздействия СП при поиске ШПС – ЧММС
В РНС «Спрут» с целью обеспечения кодового разделения каждый из сигналов ОС сформирован в соответствии с циклически сдвинутым модулирующим кодом относительно исходного M -кода. В соответствии с этим коэффициенты корреляций (28) могут принимать значения уровня главного и боковых выбросов модуля (рассчитанный по формулам [15]) нормированной периодической автокорреляционной функции (НПАКФ) для широкополосного сигнала с ЧММС, при модулирующей кодовой последовательности (длины L = 16383), формируемой в генераторе M -последовательности (14-разрядный регистр с соответствующими отводами обратной связи). Согласно [15], форма вычисленной НПАКФ носит равнобочную (вверх и вниз сходящую) трапецию. При этом для вверх и вниз сходящих значений корреляционной функции, определяемых приблизительно равными интервалами (2500 τ э ) задержек. На интервале 2501 т э ^ 13883 т э значение максимального выброса НПАКФ составляет 1,8*10-2, среднее значение выбросов НПАКФ составляет 4,2*10–3. В силу поведения главного выброса (3) минимальное значение 6,1*10-6 может быть на интервале 3 т э ^ 16382 т э временных задержек. Согласно (28), при cos[^( t )] = - 1 коэффициент Rnk (т) должен принимать минимально возможное значение.
C учётом сказанного, наиболее приемлемым будут значения коэффициента Rnk (τ) , определяемого вверх сходящимся участком вычисленной НПАКФ на интервале задержек 3 тэ ^ 2500 т э .
Если опорные станции удалены друг от друга на расстояние r =350 км, то при этом задержка распространения поверхностного сигнала составит τр ≃ 1,167 мс (используя скорость и - 3*108 м/c распространения сигнала, совершаем ошибку порядка 0,1 %) и при т э = 2,5*10-6 с будет соответствовать «циклической задержке» n o = r / (и тэ) на 466 - 467 модулирующих двоичных символов { dnl } . На рис. 5 представлены фрагменты излучаемого сигнала с циклическим сдвигом n i - 1 удалённой опорной станцией ( ОС i , i = 1,3 - возможные номера удалённых опорных станций), и принимаемого бортовой станцией ( БС i ) того же сигнала, с учётом задержки т p при его распространении, и приёма бортовой станцией ( БСк , к = 1,3 - возможные номера ближайших опорных станций) излучённого сигнала с циклическими сдвигами nk - 1 ближайшей опорной станцией ( ОСk ). Здесь коэффициент корреляции Rnk (τ) будет определяться как задержкой т p , так и циклическими сдвигами ( nk - 1 и n i - 1) модулирующего кода { dnl } исходной M -кодовой последовательности:
ОС i
БC i
Т э L
Т э
ni- n i + 1 ••• L — 1| L\ 1 I 2 ••• ni- — 1
ti 1
T p по т э
n i ^+ 1 1 •
VT”
tБi
n i I n i + 1 •••
t2;
t
• • L — 1 L ' 1 '2 • • • ni- — 1
n i I n , + 1 •••
T ik •
t
Б Ck n k n k + 1 ••• nk + no — 1 n k + no... l| 1 ••• nk
1 nk n kk + 1 •••
tk 1
Т э L tk2
t
Рис. 5. Фрагменты излучаемых ОС и принимаемых БС сигналов
Fig. 5. Diagrams of the emitted FS and received AS signals
R nk (т) = R nk (T ik ) = R nk [( n k — 1)т э + т p — ( n i — 1)т э ] = R nk [( nk + no — n i )т э ]. (29)
Для указанных опорных станций возможны следующие сочетания номеров удалённой и ближайшей опорных станций относительно бортовой станции: 1 и 2, 1 и 3, 2 и 3, 2 и 1, 3 и 1, 3 и 2. Выбираем циклические сдвиги модулирующего кода {dnl } исходной M -кодовой последовательности для OC1 : n1 — 1 = 0, OC2 : n2 — 1 = 24 , OC3 : n3 — 1 = 49 . Отсюда при известном no = 466 и возможных сочетаниях номеров ОС через (28) будут получены следующие тактовые номера задержек τik :
ОС1 и ОС2 ^ 25 + 466 - 1 = 490;
ОС1 и ОС3 ^ 50 + 466 - 1 = 515;
ОС2 и ОС3 ^ 50 + 466 - 25 = 491;
ОС2 и ОС1 ^ 1 + 466 - 25 = 442;
ОС3 и ОС1 ^ 1 + 466 - 50 = 417;
ОС3 и ОС2 ^ 25 + 466 - 50 = 441.
На рис. 6 представлен фрагмент вверх сходящегося графика модуля НПАКФ для ЧММС сигналов при дополнительной ФМ на интервале [361τэ,540τэ ] тактовых задержек (с целью получения высокого разрешения). Как видно из рис. 6, значение максимального выброса составляет не более 4*10–3 и при значениях тактов 417, 441, 442, 490, 491 и 515 значения выбросов так же составляют не более 4*10–3. Отсюда возможные значения коэффициента Rkn (τ) на интервале [361τэ,540τэ ] тактовых задержек не смогут превысить величину 4,0*10–3 при тактовой задержке распространения сигнала n o.
Теперь рассмотрим возможные значения коэффициентов корреляций в (28) на интервале [361τэ,540τэ ].
Коэффициент Rkk (τ) соответствует синхронному вычислителю В k (рис. 3), то его значение соизмеримо с единицей (|т| < т э / 2) и можно принять равным 1.
Как выше было показано, значения коэффициента Rkn (τ) не смогут превысить величину 4,0*10–3.
При работе схемы распознавания (рис. 3) для второго сигнала выбирается циклический сдвиг n min = 5 относительно первого сигнала, при котором коэффициент взаимной корреляции
R min ( n mi n т э ) равен минимальной величине R min = 1/ L =5,1*10 5 (рис. 7) и тогда коэффициент Rkp (τ) = R min можно принять.
• ••
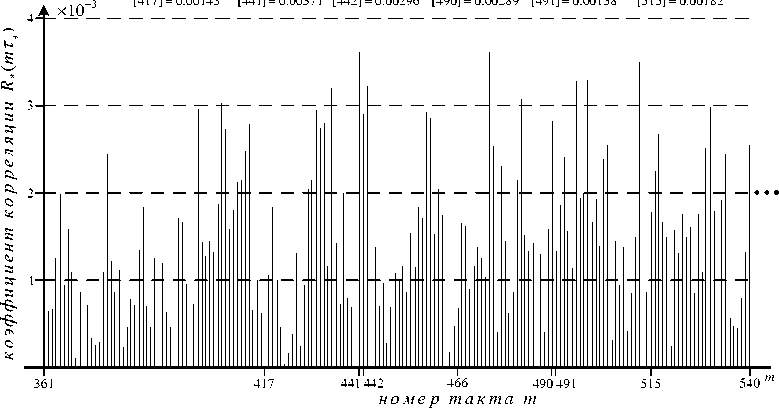
Рис. 6. Фрагмент графика модуля НПАКФ для ЧММС сигналов с дополнительной ФМ на интервале тактов [361,540]
Fig. 6. Fragment of the diadram normalized PACF module for MSK signals with additional FM on the clock interval [361,540]
Относительно второго сигнала (рис. 3–6) значения коэффициента Rnp (τ) также будут находиться в интервале [361τэ,540τэ ] тактовых задержек и не превысят 4*10–3.
Посредством (18), (17), (22) и (28) можно определить возможные эквивалентные потери энергии АhЭ анализируемого сигнала (ЭПЭАС) при заданном значении отношения Сигнал/ Шум h2 , обусловленные действием структурной помехи в форме сигнала sn (t) интенсивностью K , возможных значениях коэффициентов Rkn и Rnp и экстремальных значениях cos[^(t)] = ±1. На рис. 8 показана зависимость ЭПЭАС при h2 ^ 10 дБ и коэффициентах корреляций Rkn , максимальном 3,9*10–3 и (для примера) определяемых возможными сочетаниями номеров удалённой и ближайшей опорных станций относительно бортовой станции: 3 и 2 ^ 3,71*10-3, 1 и 2 ^ 2,89*10-3, 2 и 3 ^ 1,38*10-3. Из анализа рис. 8 следует, что поиск сигналов совместно со структурной помехой при её интенсивности K может проводиться в пределах верхней (cos(^(t)) < 0) и нижней (cos(^(t)) > 0) границ вероятности ошибки синхронизации. При поиске сигналов и cos(^(t)) > 0 отрицательное действие структурной помехи sn (t) исключается. Из поведения графиков (рис. 8) следует, что меньшему значению коэффициента Rkn(p)(τ) соответствуют и меньшие ЭПЭАС. При действии структурной помехи с интенсивностью не более 34 дБ допустимыми эквивалентные потери энергии анализируемого сигнала составят не более 3 дБ (при минимальном значении коэффициента корреляций Rkn =1,38*10–3 – не более 2 дБ) и эквивалентное отношение Сигнал/ Шум h2 составит не более h2 - Аh2 = 7 дБ. Таким образом, чтобы обеспечить надёжный поиск анализируемого сигнала при отношении Сигнал/ Шум h2 ~ 10 дБ (обеспечить вероятность ошибки синхронизации не хуже 1*10-3 при ошибке синхронизации |т| < тэ / 2 , рис. 2) необходимо обеспечить h2 ~ 15 -16 дБ, но с учётом потерь Сигнал/ Шум составляет h2 ~ 7 дБ, что для поиска потребует дополнительного некоге- рентного накопления до 15–16 дБ. Величине 7 дБ соответствует относительно сильный сигнал и тогда обобщённый закон Релея распределения модуля Vk можно аппроксимировать нормальным законом с математическим ожиданием M(Vi) и дисперсией D(Vi) (20), и тогда для обеспечения h2 ~ 15 -16 дБ необходимо произвести 8-кратное линейное накопление, и тогда «параллельный» поиск можно будет провести за 8Lтэ < 0,33 с (в РНС «Спрут» L = 16383, тэ = 2,5 мкс - длительность элемента сигнала).
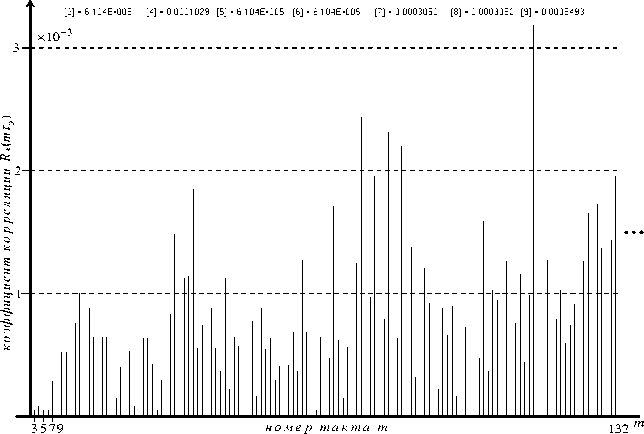
Рис. 7. Фрагмент графика модуля НПАКФ для ЧММС сигналов с дополнительной ФМ на интервале тактов [3,132]
Fig. 7. Fragment of the diadram normalized PACF module for MSK signals with additional FM on the clock interval [3,132]

Рис. 8. Зависимость энергетических потерь анализируемого сигнала от интенсивности K :
1 - при R kn = 3,9*10-3; 2 - при R kn = 3,71*10-3; 3 - при R kn = 2,89*10-3; 4 - при R kn = 1,38*10-3
Fig. 8. The dependence of the energy losses of the analyzed signal on the intensity K :
1 - при R kn = 3,9*10-3; 2 - при R kn = 3,71*10-3; 3 - при R kn = 2,89*10-3; 4 - при R kn = 1,38*10-3
На рис. 9. представлена рабочая зона РНС (для РНС «Спрут» рабочая зона построена с учётом принятия максимального удаления от опорной станции до D max = 600 км), образованная посредством 3-х совмещённых секторов, пересекающихся в точках Пik , центрами которых являются местоположения ОСi (для примера, на островах), а дуги di есть геометрическое место точек с максимальным удалением ( R 1 = R 2 = D max ) от ОСi . При движении бортовой станции от пункта Пa (ближайшее к OC 2 место расположения БС ) к пункту Пb происходит удаление БС от всех OC и можно сказать, что происходит нарастание задержки распространения сигналов как от удалённой опорной станции OC 1 , так и ближайшей опорной станции OC 2 . В этом случае, при изменении трассы ∆ r 1 распространения сигнала от OC 1 и изменении трассы ∆ r 2 распространения сигнала от OC 2 относительно БС, коэффициент корреляции Rnk (τ ik ) будет определяться
Rnk (τ ik ) = Rnk [( nk - 1)τ э + τ p + Δτ1 - Δτ2 - ( ni - 1)τ э ] = Rnk [( nk + no - ni )τ э + Δτ] , (29)
Здесь Δτ1 = Δ r 1 / v - изменение задержки распространения сигнала от OC 1 , Δτ2 = Δ r 2 / v - изменение задержки распространения сигнала от OC 2 ( v - скорость распространения поверхностной электромагнитной волны). Разность изменения задержек Δτ при движении БС в правой полуплоскости относительно OC 2 будет всегда отрицательной, так как Δ r 2 ≥ Δ r 1 , а при движении в левой полуплоскости уменьшается и τ p , что говорит о невозможности превышения максимальной возможной величины τ ik и коэффициент Rnk (τ ik ) не превысит 3,9*10–3. То же самое можно сказать и о поиске сигнала при остальных сочетаниях номеров удалённой и ближайшей опорных станций.
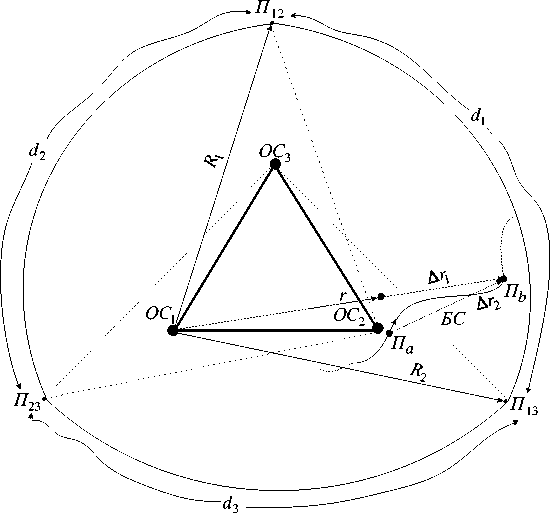
Рис. 9. Рабочая зона РНС с учётом расположения опорных и бортовой станций
Fig. 8. The working area of the RNS, taking into account the location of the support and on-board stations
Заключение
Предложенный в данной статье метод анализа воздействия структурных помех на поиск сигналов, у которых в качестве модулирующих кодов используют выбранные соответствующим образом, циклические сдвиги на ni элементов одной и той же M -последовательности длины L = 16383. Показанный выбор циклических сдвигов позволяет использовать коэффициенты корреляций НПВКФ структурных помех на порядок меньше максимального (2,8*10–2), что приводит к эквивалентным энергетическим потерям сигнала – поиска не более 3 дБ. Показанные условия поиска сигналов ОС в широкополосной РНС средневолнового диапазона позволяют эффективно применять кодовое разделение сигналов при использовании совмещённого радиоканала (для навигационных измерений и передачи данных) без ограничения рабочей зоны РНС, определяемой максимальным значением дальности D max = 600 км.
Список литературы Помехоустойчивость поиска широкополосных сигналов с минимальным сдвигом частотной манипуляции радионавигационной системы при воздействии структурных помех
- Варакин Л. Е. Системы связи с шумоподобными сигналами. М.: Радио и связь, 1985. 384 с.
- Агафонников А. М. Фазовые радиогеодезические системы для морских исследований. М.: Наука, 1979. 164 с.
- Варакин Л. Е. Теория систем сигналов. М.: Советское радио, 1978. 304 с.
- Варакин Л. Е, Власов А. В. Анализ воздействия мощной структурной помехи на радиотехническую систему с шумоподобными сигналами // Радиотехника и электроника. 1983. Т. 28, № 6. С. 1094–1101.
- Методы модуляции и приёма цифровых частотно-манипулированых сигналов с непрерывной фазой / В. Б. Крохин, В. Ю. Беляев, А. В. Гореликов и др .// Зарубеж. Радиоэлектроника. 1982. № 4. С. 58–72.
- Муссонов В. М., Романов А. П. Поиск широкополосных сигналов наземной радионавигационной системы // Сибирский аэрокосмический журнал. 2022. Том 23, № 3. C. 391–408. Doi: 10.31772/2712-8970-2022-23-3-391-408.
- Шумоподобные сигналы в системах передачи информации / ред. В. Б. Пестряков. М.: Радио и связь, 1982. 424 с.
- Вентцель Е. С., Овчаров Л.А. Прикладные задачи теории вероятностей. М.: Радио и связь, 1983. 416 с.
- Янке Е., Эмде Ф., Лёш Ф. Специальные функции. М.: Наука, 1977. 342 с.
- Тихонов В. И., Харисов В. Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991. 608 с.
- Vaisey D. J., McLane. Bend limitation and error rate in digital UNF-FM transmission // IEEE Trans. 1983. Vol. COM-31, No. 11. P. 1222–1224.
- Кинкулькин И. Е., Рубцов В. Д., Фабрик М. А. Фазовый метод определения координат. М.: Сов. Радио, 1979. 280 с.
- Бронштейн И. Н., Семендяев К. А. Справочник по математике для инженеров и учащихся втузов. М.: Наука, 1986. 544 с.
- Варакин Л. Е. Теория сложных сигналов. М.: Сов. радио, 1970. 376 с.
- Simon M. K. The autocorrelation function and power spectrum of PCM/FM with random binary modulating waveforms // IEEE Trans. 1976. Vol. COM-24, No. 10. P. 1576–1584.
