Поперечные колебания каната, движущегося в продольном направлении

Автор: Анисимов Валерий Николаевич, Литвинов Владислав Львович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-1 т.19, 2017 года.
Бесплатный доступ
В статье исследуются колебания каната, движущегося в продольном направлении. Модель учитывает натяжение каната, изгибную жёсткость и сопротивление внешней среды. Объект исследования относится к широкому кругу колеблющихся одномерных объектов с движущимися границами. При постоянной скорости продольного движения колебания каната характеризуются набором собственных частот. В случае отсутствия сопротивления среды для решения задачи использовано дискретное интегральное преобразование Фурье. В результате в виде ряда получено уравнение, позволяющее найти точные значения собственных частот. Задача при наличии сопротивления среды решалась методом Канторовича-Галеркина. Полученное уравнение позволяет найти приближённые значения двух первых собственных частот. Сравнением точных и приближённых частот оценена точность решения, полученного методом Канторовича-Галеркина. В статье проанализировано, как влияет скорость продольного движения каната на форму собственных колебаний. Решение произведено в безразмерных переменных, что позволяет использовать полученные результаты для расчёта колебаний широкого круга технических объектов.
Колебания объектов с движущимися границами, краевые задачи, математические модели, резонансные свойства
Короткий адрес: https://sciup.org/148205277
IDR: 148205277 | УДК: 517.958:531.12;
Transverse vibrations rope moving in longitudinal direction
The article researches the oscillations of a rope moving in the longitudinal direction. The model takes into account the tension of the rope, flexural stiffness and resistance of the external environment. The object of the study refers to a wide range of oscillating one-dimensional objects with moving boundaries. At a constant speed of longitudinal motion, the rope oscillations are characterized by a set of eigen frequencies. In the absence of medium resistance, a discrete integral Fourier transform is used to solve the problem. As a result, an equation is obtained in the form of series, which makes it possible to find the exact values of the eigen frequencies. The problem in the presence of medium resistance was solved by the Kantorovich-Galerkin method. The equation obtained allows us to find approximate values of the first two eigen frequencies. A comparison of the exact and approximate frequencies estimates the accuracy of the solution obtained by the Kantorovich-Galerkin method. The article analyzes how the speed of longitudinal rope motion affects the shape of natural oscillations. The solution is made in dimensionless variables, which allows us to use the obtained results to calculate the oscillations of a wide range of technical objects.
Текст научной статьи Поперечные колебания каната, движущегося в продольном направлении
В статье исследуются поперечные колебания каната, движущегося в продольном направлении. Модель учитывает натяжение каната, из-гибную жёсткость и сопротивление внешней среды. Объект исследования относится к широкому кругу колеблющихся одномерных объектов с движущимися границами и нагрузками [1-20]. Такие объекты широко распространены в технике. Это канаты грузоподъёмных установок [2, 9, 13, 20], гибкие звенья передач [1, 8, 17], балки [3, 18], лентопротяжные механизмы [14], конвейеры [16] и т.д. Наличие движущихся границ делает неприменимыми к решению таких краевых задач классические методы математической физики, поэтому они в настоящее время изучены недостаточно.
ПОСТАНОВКА ЗАДАЧИ
Схема объекта изучения изображена на рис. 1.
Уравнение, учитывающее изгибную жёсткость, натяжение каната и сопротивление внешней среды, имеет вид:
utt(x,t)+buxxxx(x,t)–a2uxx(x,t)+Gut(x,t)= 0. (1)
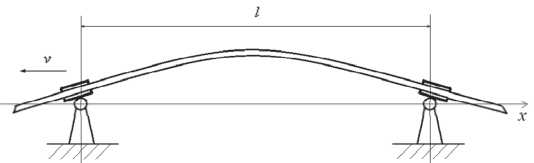
Рис. 1. Схема объекта
Здесь u(x,t) – поперечное смещение точки каната с координатой x в момент времени t ; b =(EI)/ р ( E – модуль упругости материала каната; I – осевой момент инерции сечения каната, р - масса единицы длины каната); a 2 = T/ р ( T - натяжение каната); G – коэффициент сопротивления среды (сила, действующая на единицу длины струны при единичной скорости поперечного движения).
Граничные условия имеют вид: u(vt, t) = 0; u(vt + l,t) = 0;
u^vt, t) = 0; uxx(vt + l,t) = 0, где v - скорость продольного движения каната, l – длина колеблющейся части.
Введем безразмерные переменные:
и(х, t) = U(f, т); f = 2к(^ Vt) ;
^к^а2 — v2 т =------1-------t-
В результате получим задачу с условиями, заданными на неподвижных границах:
UTT(f,r) + ^Uffff(f,r) - U ff (f,T) -
-уи^,^ +2UT(f,T) -^U^f,^ = 0;
U(0,t) = 0;U(2^,t) = 0;
Uff(0,T) = 0; U^(2k,t) = 0.
Здесь
GZ
^ / 2 (а 2 -у 2 );Я V;^ .-.'
2v GvZ
Четыре коэффициента уравнения (1) могут быть выражены через три безразмерных параметра:
a = ".fl = f^.n = _5L a Z2a2 2ла
Параметры характеризуют: a - скорость продольного движения каната; 9 - изгибную жёсткость; D – сопротивление среды.
Через безразмерные параметры коэффициенты уравнения (3) выражаются следующим образом:
п 9 2“
1 - a2 . Vl-a2 .
. ^ ^
Vl-a2 1 - a2
РЕШЕНИЕ ЗАДАЧИ
Решим задачу (3), (4) без учёта изгибной жёсткости ( в = 0). Решение будем искать в виде:
Шеи /^К^ .
Для нахождения функции ^(f) получим следующую краевую задачу:
/( f) + (уш + ^)^ ' (f) - (ш2 + 2w)Xf) = 0; (5)
^(0) = 0 ;^(2я) = 0. (6)
Решение задачи (5-6) не представляет затруднений. В результате решения получено выражение для собственных частот колебаний:
у^ + 2Я.
ш„ = - + п у2 + 4
7(У2 +4)(п2 +^2) - (у^ + 2Л)2
+t у2+4 .
Здесь i – мнимая единица; n – порядковый номер частоты. Действительная часть выражения (7) характеризует затухание колебаний, а мнимая частоту.
При отсутствии затухания ( X = п = 0) выражение (7) примет вид:
^
ш п I —--- . (8)
7 у2 + 4
При этом собственные функции определяются выражением:
,(f) = sin(tl22Z)2£) + sln((1^2Z)2£).
Как изменяются собственные функции ^(f) в зависимости от параметра a, показано на рис. 2.
Анализ рисунка 2 показывает, что чем больше скорость движения каната, тем больше искажаются собственные функции. Искажение
^ А
a = 0
1.5
a = 0.4
0.5
a = 0.6
a = 0.8
-0.5
a = 0.9
2 л:
-1 0
f
Рис. 2. Зависимость собственных функций от скорости продольного движения каната
происходит на границе, движущейся навстречу бегущим волнам.
Решим задачу (3, 4) с учётом изгибной жёсткости, но без учета затухания ( λ = η = 0). Решение будем искать в виде
^(еа) п(()г"-^, где i – мнимая единица.
Для определения ^(е) получим следующую задачу:
/^""(f) - ^"(f) - /уш^ ' (е) - ш2О — 0 ; (9)
Объединяя члены при p и –p с учётом (11) и краевых условий (10) , получим систему двух линейных уравнений относительно µ 1и f 3: д(2л) — ^(0) — 2Л ^F(0) + 2(F(-P) + F(p))) — 0;
^(0) — 0; ^(2л) — 0; ^"(0) — 0; ^"(2л) — 0. (10)
Для решения предполагается использовать дискретное интегральное преобразование Фурье. При применении преобразования к задаче (9,10) ряд для ^" ( f ) получается расходящимся. Для улучшения сходимости введем новую функцию:
/(е) = ^(е)+^21е-^2-е3+^2-е4, <и> где ^1 — ц(2л) -^'(0).
Функция /(f) удовлетворяет условиям: /(0) — 0 ;/(2л) — 0; /"(0) — 0;
д" ( 2л ) — £(0 ) — -2^F ( 0 ) + 2 P 2 (F ( -p ) +F ( p ) ) ) — 0.
Из равенства нулю определителя системы получается уравнение собственных частот:
<6
^^^^^в
со
22 — р^А р
/А р
^^^^^в
в р 2
СО
'>2
-Арр2 + (3.28991р2 + 1)(Арш2 + В2)
р2(А р 2-В р 2)
+
со
+
2 /А р р2 рт1 А р 2 - В
* (12.98778 - А--ш2
*
1 р
3.28991 ш2
''
'
'
/ (2л) — 0; / (2л) — / (0).
Это улучшает сходимость получаемых далее рядов.
Относительно /(^) получим следующую задачу:
//""(/) - /"(/) - «Гш/'(О - ш2/(е) —
, 12/ 1 . / 6 ш2 -6 , . 3 ч
М 1 ( (2л)3 2 1/Ш + у(2л)2 2 2 + \(2л)3 + 1/Ш (2л)2) ^ +
+ (т^- ^ш)е3- лтЩ^о4);
\ (2л)2 (2л)3 2(2л)3
/(0) — 0 ;/(2л) — 0; /"(0) — 0; /"(2л) — 0.
Для решения задачи используем дискретное интегральное преобразование Фурье:
2л
F(p) — I /(f) e^df; р — 0, ±1, ±2...... о
В результате применения преобразования получим:
F(p) —
-//3 + 0.3039бР | (-р2 + (/шр + ш2)(3.28991р2 + 1))
/р4 + р2 — /шр — ш2
;
со
+2Z р=1
-Арр2 + (3.28991р2 + 1)(Арш2 + В2).
р4(Ар2-Вр2)
■ )•
Здесь Ар — /р4 + р2
— ш2;Вр — ушр.
Решим задачу (3), (4) методом Канторовича-Галеркина. Решение будем искать в виде:
^(е,т) — ^(е)ешт.
Для определения ^(^) получим следующую задачу:
L[д(е>1 — /^""(0 - ^"(е) - (уш+^)^ ' (е) +
+ (ш2 + шЛ)^^) — 0 ; ^(0) — 0 ; ^(2л) — 0;
р = ±1,±2...
F(0) — ^ /3 + 0.30396^ (12.98788
—
£ ш2
—
3.289905 \
Ш2 /
/(0) — 0; /(2л) — 0.
Функцию ^(f) возьмём в виде: ^ю — с^ю + GMf), где £(0 — sin |" ; M2 ( f ) — sin* >". Данные функции удовлетворяют граничным условиям (15) и являются первой и второй собственными функциями задачи (3), (4) в случае, когда продольное движение каната отсутствует.
Согласно методу Канторовича-Галеркина, произвольные постоянные C 1 и C 1 находятся из следующей однородной системы линейных алгебраических уравнений:
2л
I LLOIM^M —0;
J 0
'"
'"
где /3—/ ( 2 л ) -/ ( 0 ) .
Обратное интегральное имеет вид:
преобразование
ОО
/(f)— 2 F(p> e-iрf
2л
.
2л
I ALOWfW —0. 0
Дифференциальный оператор L[^(f)1 определяется выражением (14).
Произведя интегрирование и приравняв определитель системы к нулю, получим уравнение собственных частот:
w4 + 2Лы3 + w2 ( 1.0625^ + 0.36025y2 + 1.25 ) +
+w(A(1.06250 + 1.25) + 0.72051y^) + (16)
((0.0625^ + 0.25)(^ + 1) + 0.36025^2) = 0.
Данное уравнение позволяет получить две первые собственные частоты поперечных колебаний каната.
Уравнение (13) было решено численно при различных значениях параметров а и 9 . Результаты вычислений приведены в табл. 2. При 9 = 0 ряды, входящие в уравнение (13) расходятся, поэтому значения частот были вычислены по формуле (8).
Уравнение (16) решалось в среде MATLAB. Для оценки точности метода Канторовича-Га-леркина уравнение (16) было решено для случая отсутствия затухания ( X = п = 0 ). Результаты вычислений приведены в табл. 1. При каждом значении а приведены следующие частоты: точное значение первой собственной частоты, точное значение второй собственной частоты, приближённое значение первой собственной частоты, приближённое значение второй собственной частоты. В таблице жирным шрифтом выделены приближённые частоты имеющие погрешность более 5%.
Анализ табличных данных показывает, что погрешность частот, полученных методом Кан-торовича-Галеркина, увеличивается с увеличением а и уменьшается с увеличением 9 . Погрешность вторых собственных частот больше чем первых.
Уравнение (13) позволяет получить любую собственную частоту. Например, при а = 0.4 и 9 = 2 получены следующие собственные частоты:
w1 = 0.7770; w2 = 2.7063; w3 = 5.8510;
w4 = 10.2345; w5 = 15.8673;w6 = 22.7436
Уравнение (16) позволяет учесть затухание ( D Ф 0 ). Например, для параметров а = 0.8; 9 = 2; D = 0.1 получены следующие частоты:
w1 = —0.0626+ 0.7543 Z;
w2 = -0.0626+ 2.8476i.
Действительная часть частот характеризует затухание колебаний, а мнимая частоту.
Если wn безразмерная частота (задача (3),
(4)), то частота исходной задачи (1), (2) находит- ся по формуле:
П+
л(а2 — v2)Pwn Zu
Таблица 1. Результаты вычислений
|
0 a |
0 |
2 |
4 |
6 |
8 |
10 |
примечания |
|
0.5 |
0.6124 |
0.7071 |
0.7906 |
0.8660 |
0.9354 |
ш^точн.) |
|
|
0 |
1 |
1.7321 |
2.2361 |
2.6458 |
3,0000 |
3.3166 |
ш2 (точн.) |
|
0.5 |
0.6124 |
0.7071 |
0.7906 |
0.8660 |
0.9354 |
^(прибл.) |
|
|
1 |
1.7321 |
2.2361 |
2.6458 |
3,0000 |
3.3166 |
ш2 (прибл.) |
|
|
0.4899 |
0.6140 |
0.7130 |
0.7993 |
0.8769 |
0.9487 |
^(точн.) |
|
|
0.2 |
0.9798 |
1.7576 |
2.2747 |
2.2747 |
3.0565 |
3.3805 |
ш2 (точн.) |
|
0.4815 |
0.6099 |
0.7099 |
0.7968 |
0.8749 |
0.9465 |
шг (прибл.) |
|
|
1.0383 |
1.7753 |
2.2876 |
2.7048 |
3.0657 |
3.3885 |
ш2 (прибл.) |
|
|
0.4583 |
0.6179 |
0.7304 |
0.8274 |
0.9137 |
0.9913 |
шг (точн.) |
|
|
0.4 |
0.9165 |
1.8430 |
2.4056 |
2.8586 |
3.2485 |
3.5968 |
ш2 (точн.) |
|
0.4323 |
0.6046 |
0.7214 |
0.8196 |
0.9066 |
0.9857 |
шг (прибл.) |
|
|
1.1565 |
1.9206 |
2.4624 |
2.9055 |
3.2896 |
3.6334 |
ш2 (прибл.) |
|
|
0.4000 |
0.6334 |
0.7770 |
0.8953 |
1.0001 |
1.0932 |
шг (точн.) |
|
|
0.6 |
0.8000 |
2.0419 |
2.7063 |
3.2340 |
3.6870 |
3.3960 |
ш2 (точн.) |
|
0.3598 |
0.6052 |
0.7558 |
0.8780 |
0.9842 |
1.0796 |
шг (прибл.) |
|
|
1.3896 |
2.2393 |
2.8513 |
3.3542 |
3.7912 |
4.1829 |
ш2 (прибл.) |
|
|
0.3000 |
0.7013 |
0.9205 |
1.0942 |
1.2435 |
1.3764 |
шг (точн.) |
|
|
0.8 |
0.6000 |
2.5899 |
3.5133 |
4.2350 |
4.8481 |
5.3913 |
ш2 (точн.) |
|
0.2584 |
0.6485 |
0.8777 |
1.0576 |
1.2109 |
1.3468 |
шг (прибл.) |
|
|
1.9352 |
3.0485 |
3.8532 |
4.5168 |
5.0948 |
5.6135 |
ш2 (прибл.) |
|
|
0.0705 |
2.1796 |
3.2835 |
4.1177 |
4.8151 |
5.4242 |
шг (точн.) |
|
|
0.99 |
1.1411 |
10.3101 |
14.4443 |
17.6036 |
20.2682 |
22.6175 |
ш2 (точн.) |
|
0.0588 |
1.9451 |
3.0599 |
3.9129 |
4.6256 |
5.2487 |
шг (прибл.) |
|
|
8.4981 |
13.2371 |
16.6261 |
19.4233 |
21.8623 |
24.0390 |
ш2 (прибл.) |
ЗАКЛЮЧЕНИЕ
В статье произведен анализ колебаний каната движущегося в продольном направлении. Модель учитывает натяжение каната, изгибную жёсткость и сопротивление внешней среды. Решение произведено точным и приближённым методами, что позволяет оценить применимость метода Канторовича-Галеркина для описания колебаний систем с движущимися границами. Полученные количественные результаты могут быть использованы для расчёта широкого круга технических объектов.
Список литературы Поперечные колебания каната, движущегося в продольном направлении
- Cамарин Ю.П., Анисимов В. Н. Вынужденные поперечные колебания гибкого звена при разгоне//Изв. Вузов. Машиностроение, 1986. №12. С. 17-21
- Горошко О. А., Савин Г. Н. Введение в механику деформируемых одномерных тел переменной длины. Киев: Наукова думка, 1971. 270 с.
- Лежнева А. А. Изгибные колебания балки переменной длины//Изв. АН СССР. Механика твердого тела, 1970. №1. С. 159-161.
- Весницкий А. И. Волны в системах с движущимися границами. М.: Физматлит, 2001.320 с
- Анисимов В. Н., Литвинов В. Л. Исследование резонансных свойств механических объектов при помощи метода Канторовича-Галёркина//Вестн. Сам.гос. техн. ун-та. Сер. Физ.-мат. Науки, 2009. № 1(18). С. 149-158.
- Анисимов В.Н., Литвинов В.Л., Корпен И.В. Об одном методе получения точного решения волнового уравнения, описывающего колебания систем с движущимися границами//Вестн. Сам.гос. техн. унта. Сер. Физ.-мат. Науки, 2012. №3(28). С. 145-151.
- Ding Hu, Chen Li-Qun. Galerkin methods for natural frequencies of high-speed axially moving beams//J. Sound and Vibr., 2010. no. 17. pp. 3484-3494.
- Zhu W. D., Zheng N. A. Exact response of a translating string with arbitrarily varying length under general excitation//Trans. ASME. J. Appl. Mech., 2008, vol. 75, no. 3. pp.
- Zhu W. D., Chen Y. Theoretical and experimental investigation of elevator cable dynamics and control//Trans. ASME. J. Vibr. And Acoust., 2006. no. 1. Pp. 66-78.
- Ерофеев В.И., Лисенкова Е.Е. Возбуждение волн нагрузкой, движущейся по поврежденной гибкой одномерной направляющей, лежащей на упругом основании//Проблемы машиностроения и надежности машин. 2016. № 6. С.14-18.
- Ерофеев В.И., Колесов Д.А., Лисенкова Е.Е. Генерация волн источником, движущимся по деформируемой направляющей, лежащей на упруго-инерционном основании//Машиностроение и инженерное образование. 2014. № 2 (39). С.37-40.
- Ерофеев В.И., Колесов Д.А., Лисенкова Е.Е. Исследование волновых процессов в одномерной системе, лежащей на упруго-инерционном основании, с движущейся нагрузкой//Вестник научно-технического развития. 2013. № 6 (70). C. 18-29.
- Zhang P., Zhu C. M., Zhang L. J. Analyses of longitudinal vibration and energetic on flexible hoisting systems with arbitrarily varying length//Journal of Shanghai Jiao-Tong University, 2008, 42(3). Pp. 481-488.
- Рагульский К.И. Вопросы динамики прецизионных лентопротяжных механизмов//В сб.: Динамика машин. М.: Наука, 1971. С. 169-177.
- Chen S.H., Huang J.L. On internal resonance of nonlinear vibration of axially moving beams//Acta Mechanica Sinica, 2005, vol.37, no. 1. pp. 57-63 (Chinese).
- Хосаев Х. С. Математическое описание динамических характеристик канатного става ленточного конвейера//Тр. Сев.-Кавк. гос. технол. ун-та. 2001. № 8. С. 234-239.
- Тихонов В.С., Абрамов А.А. Поперечные колебания гибкой нити переменной длины в потоке//Вестник МГУ. Сер. 1, 1993. № 5. С.45-48.
- Анисимов В.Н., Литвинов В.Л. Математические модели продольно-поперечных колебаний объектов с движущимися границами//Вестн. Сам.гос. техн. ун-та. Сер. Физ-мат. Науки, 2015. Т. 19. № 2. С. 382-397.
- Кечеджиян Л.О., Пинчук Н. А., Столяр A.М. Об одной задаче математической физики с подвижной границей//Извест. вузов. Северо-Кавк. регион. Естеств. науки, 2008. № 1. C. 22-27.
- Анисимов В.Н. Продольные резонансные колебания вязкоупругого каната грузоподъёмной установки//Известия Самарского научного центра Российской академии наук. 2016. Т. 18. № 4. С. 128-133.
