Портативный комплекс приема телеметрической информации для передачи в центр управления полетами данных по спуску пилотируемых транспортных кораблей

Автор: Андрейко Александр Николаевич, Кравец Вадим Георгиевич, Кучеров Максим Александрович, Лучинский Владимир Павлович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (12), 2016 года.
Бесплатный доступ
В статье приведены предпосылки создания и основные характеристики портативного переносного наземного комплекса приема телеметрической информации, предназначенного для приема и передачи в Центр управления полетами (ЦУП) в реальном масштабе времени данных по спуску космических аппаратов «Союз ТМА» с орбиты искусственного спутника Земли (ОИСЗ), включая процесс разделения отсеков корабля при движении по траектории, проходящей вне зон связи со станциями слежения на территории Российской Федерации. Портативный наземный комплекс разработан на современной системно-технической базе с управляемым программно-математическим обеспечением, прост в эксплуатации. При этом впервые в качестве основного канала передачи полного потока телеметрической информации в ЦУП использовалась сеть Интернет. В период 2011.2015 гг. портативный наземный комплекс надежно обеспечил прием телеметрии на всех спусках кораблей «Союз ТМА» с ОИСЗ в режиме передачи информации в ЦУП в реальном масштабе времени.
Портативный переносной наземный комплекс приема телеметрической информации, станции слежения, центр управления полетами, районы посадки спускаемого аппарата транспортного корабля
Короткий адрес: https://sciup.org/14343510
IDR: 14343510 | УДК: 629.78.058.76
Portable telemetry information receiving complex for transmission to the mission control center data on the manned transport spacecraft descent
In the article the following is given: prerequisites for the development and the main characteristics of a portable ground telemetry information receiving complex intended to receive and transmit to the Mission Control Center (MCC) data on the Soyuz TMA spacecraft descent from Earth satellite orbit (ESO) in real time including the separation process of the spacecraft compartments when flying the trajectory which passes beyond the areas of communication with the tracking stations in the territory of the Russian Federation. This portable ground complex is developed on a modern system-technical base with controlled mathematical software, easy to operate. In this case Internet Network was used for the first time as the main channel to transmit a full flow of telemetry information to MCC. At a period of 2011.2015 the portable ground complex reliably provided telemetry reception during all the descents of the Soyuz TMA spacecraft from the ESO in the mode of data transmission to MCC in real time.
Текст научной статьи Портативный комплекс приема телеметрической информации для передачи в центр управления полетами данных по спуску пилотируемых транспортных кораблей
АНДРЕЙКО А.Н.

КРАВЕЦ В.Г.

КУЧЕРОВ М.А.

ЛУЧИНСКИЙ В.П.
Предпосылки для создания портативного переносного наземного комплекса приема
В октябре 2007 г. и апреле 2008 г. после отстыковки от МКС и спуска с орбиты пилотируемых кораблей «Союз ТМА-10» [1] и «Союз ТМА-11» [2] произошли нештатные разделения отсеков кораблей СА–ПАО (спускаемый аппарат – приборно-агрегатный отсек), что привело к перегреву конструкции СА (СА начинал движение в атмосфере люком вперед) и баллистическому спуску (c повышенными перегрузками) вместо штатного управляемого. Экипажи обоих кораблей благополучно спустились на Землю, но происшедшее было тревожным и требовало тщательного анализа и мероприятий по предотвращению таких ситуаций в будущем.
Штатное разделение отсеков корабля перед входом в атмосферу происходило по спусковой трассе на высоте 140 км и, как и последующий полет СА и ПАО, проходило вне зон связи со станциями слежения на территории РФ, вследствие чего полный объем телеметрии по разделению отсеков корабля и динамике движения на спуске не мог быть получен. Поэтому пришлось анализировать ситуацию по сокращенному объему информации из записи в бортовом магнитофоне СА (аппаратура средств записи информации). По результатам анализа было установлено, что в обоих случаях наиболее вероятной причиной нештатного разделения СА–ПАО является нераскрытие замка в плоскости 1 на стыке фермы ПАО и СА из-за несрабатывания разрывных пироболтов 8×55 в составе замка под воздействием комплексного сочетания внешних космических факторов (вакуум, электромагнитные импульсы, разряд потенциала корпуса МКС). По результатам заключения комиссии по анализу причин перехода кораблей в режим баллистического спуска было принято решение о замене пироболтов 8×55 во всех замках фермы СА–ПАО на пироболты 15×571, более устойчивые к внешним воздействиям, а также о необходимости обеспечения приема полного объема телеметрической информации (ТМИ) по процессу разделения отсеков корабля. Кроме того, для улучшения условий разделения отсеков при нештатной ситуации после команды разделения отсеков введен режим управляемого полета связки СА–ПАО.
Для обеспечения обязательного приема ТМИ по процессу разделения было принято решение о создании и размещении вне территории РФ портативного переносного наземного комплекса приема (ППНКП) ТМИ. ППНКП должен был принимать, обрабатывать и отображать оперативную информацию по разделению отсеков корабля, а также передавать в ЦУП в реальном масштабе времени полный поток ТМИ (256 кбит/с) с бортовой телеметрической системы МБИТС-ТКА корабля «Союз ТМА», передаваемый с борта в метровом диапазоне радиоволн на частоте 166 МГц через всенаправленную антенну.
Был определен разработчик ППНКП — ЗАО «НПЦ «МЕРА», уже имевшее опыт взаимодействия с РКК «Энергия» по созданию и эксплуатации наземного технологического комплекса системы измерений кораблей «Союз» на технических позициях космодромов. В конце 2010 г. РКК «Энергия» был получен первый экспериментальный экземпляр аппаратуры ППНКП с антенной метрового диапазона.
Описание ППНКП
Портативный переносной наземный комплекс приема ТМИ обеспечивает прием, регистрацию, декоммутацию и визуальный контроль параметров ТМИ корабля «Союз ТМА» при его спуске, включая участок разделения отсеков, а также передачу ТМИ в реальном времени в ЦУП. Дальность приема ТМИ должна была составлять не менее 800 км. Практическая дальность приема ТМИ составила не менее 1 000 км.
Были определены основные элементы комплекса:
-
• приемная малонаправленная антенна метрового диапазона;
-
• малошумящие усилители с узкополосными фильтрами;
-
• малогабаритная приемная телеметрическая станция (ТМС) «Источник-М» в переносном исполнении.
Масса всего комплекса не превышала 15 кг. Функциональная схема ППНКП приведена на рис. 1.
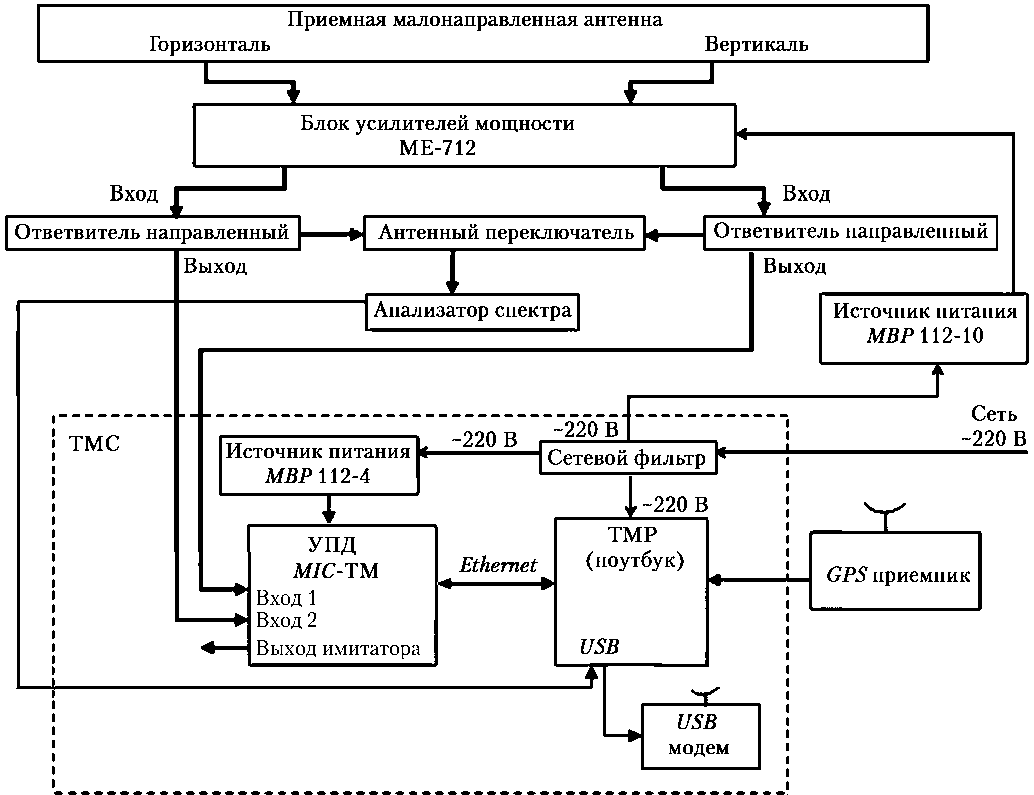
Рис. 1. Функциональная схема портативного переносного наземного комплекса приема
Примечание. ТМС — телеметрическая станция; УПД — устройство приема и демодуляции.
Приемная малонаправленная антенна представляет собой две конструктивно объединенные антенны, каждая со своей линейной поляризацией (горизонтальной и вертикальной), выделяемой вибраторами, расположенными в плоскости поляризации сигнала. Такая конструкция антенны обеспечивает диаграмму направленности не хуже ±20 ° по азимуту и углу места, что дает возможность надежного ручного наведения антенны на КА по рассчитанным целеуказаниям. Приемная малонаправленная антенна в сборе показана на рис. 2.

Рис. 2. Приемная малонаправленная антенна
Каждая из принимающих антенн образует собственный канал приема ТМИ. Каждый канал поступает на свой усилитель, расположенный в блоке усилителей мощности МЕ-712, где происходят выделение рабочей частоты при помощи узкополосных фильтров и усиление полезного сигнала.
Усиленный и отфильтрованный сигнал по каждому каналу через направленный ответвитель поступает на устройство приема и демодуляции (УПД) MIC -ТМ [3]. Часть сигнала через антенный механический переключатель поступает на спектроанализатор, предназначенный для оценки качества принимаемого сигнала, а также оценки помеховой обстановки в месте установки ППНКП.
В УПД ТМС осуществляется автовыбор одного из двух каналов приема телеметрических сигналов. Автовыбор канала производится, исходя из минимального количества сбоев принимаемой информации. Затем де-модулированная и оцифрованная информация с УПД в режиме автовыбора поступает в составе ТМС по сети Ethernet на персональный компьютер ТМР для регистрации и отображения ТМИ. Внешний вид УПД приведен на рис. 3.

Рис. 3. Внешний вид устройства приема и демодуляции (параметры: длина — 270 мм; ширина — 150 мм; высота — 135 мм)
Установленная в ТМР программа «ТМ Регистратор» [4] производит настройку УПД на выбранную несущую частоту радиосигнала БИТС-ТКА и структуру телеметрического (ТМ) кадра, а также регистрацию, отображение, а затем передачу в ЦУП в режиме реального времени полного объема ТМИ через USB -модем. Передача осуществляется на выделенный IP -адрес компьютера в ЦУП по 3 G -сетям местных операторов сотовой связи.
Необходимо отметить, что первый экспериментальный опыт передачи ТМИ в ЦУП через общедоступные каналы сети Интернет был получен в рамках программы «Морской старт», где этот канал был резервным по отношению к основному каналу передачи через спутники связи IntelSat и наземные оптоволоконные каналы связи [5]. При передаче ТМИ с ППНКП канал передачи через Интернет был впервые использован в качестве основного.
Для определения точности позиционирования ППНКП на местности был использован GPS -приемник, подключаемый к ТМР посредством канала связи Bluetooth .
Источники питания МВР 112-4 и МВР 112-10 обеспечивают преобразование напряжения 220 В в напряжение питания микросхем УПД и блока усилителей и фильтрации. Для повышения мобильности ППНКП в его состав включен преобразователь 12/220 В для обеспечения питания всех элементов комплекса от автомобильного аккумулятора.
Функциональная схема УПД приведена на рис. 4.
В состав УПД входят два независимо работающих радиоприемника. Радиопри- емники состоят из линейной части (модуль МЛТ-018R) и двухканального демодулятора (модуль MR2502). В модуле МЛТ-018R осуществляются селекция, усиление принятых высокочастотных сигналов и перенос спектра полезных сигналов в область промежуточной частоты. В модуле MR2502 производятся аналого-цифровое преобразование сигналов промежуточной частоты, прореживающая фильтрация сигнала и демодуляция ТМ кадра МБИТС-ТКА.
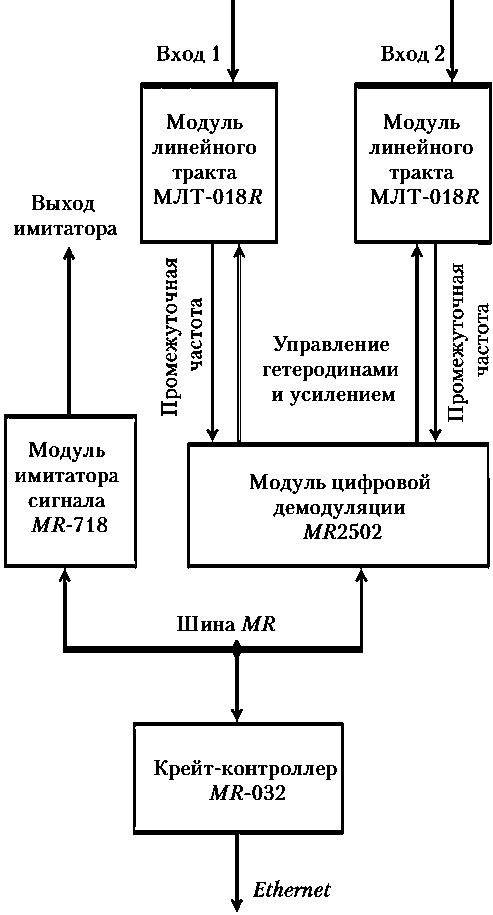
Рис. 4. Функциональная схема устройства приема и демодуляции
Для настройки ППНКП и контроля его работоспособности в составе УПД имеется имитатор телеметрических сигналов — модуль MR -718.
Модуль MR-032 является контроллером на шине MR для модулей MR2502, MR2081, MR-718 и осуществляет связь по шине Ethernet с компьютером ТМР для настройки параметров радиоприемников и имитатора и для передачи в ТМР данных ТМ кадра.
Следует отметить, что, в отличие от многочисленного персонала обслуживания аппаратуры приема ТМ на станциях слежения наземного комплекса управления (НКУ), персонал для обслуживания ППНКП составляет не более трех-четырех квалифицированных инженеров.
В результате многочисленных тренировок персонала время развертывания ППНКП из режима хранения в состояние готовности к сеансу связи с КА было доведено до одного часа. Типовая циклограмма подготовки ППНКП к работе и взаимодействию с ЦУП приведена в табл. 1.
Таблица 1
Циклограмма подготовки ППНКП к работе
|
№ п/п |
Время по отношению к началу сеанса связи |
Действия персонала портативного переносного наземного комплекса приема (ППНКП) |
|
1. |
–1,5 ч |
Выдвижение на место развертывания. Сборка схемы, контроль кабельных соединений, оценка помеховой обстановки |
|
2. |
–30 мин |
Готовность ППНКП к работе. Передача в ЦУП сигнала с имитатора телеметрической информации (ТМИ) для проверки качества каналов связи через сеть Интернет |
|
3. |
–10 мин |
Доклад в ЦУП о готовности к сеансу связи |
|
4. |
Сеанс связи |
|
Выбор мест размещения
Анализ возможных траекторий спуска пилотируемых кораблей «Союз» с ОИСЗ показал, что оптимальными местами для размещения ППНКП являются о. Крит в Греции и г. Шарм-эш-Шейх в Египте.
Выбор места размещения ППНКП для приема ТМИ процесса разделения корабля осуществлялся, исходя из прохождения трасс спуска в приоритетные районы посадки СА. Все районы посадки располагаются в Казахстане. Всего было определено 13 таких районов, шесть — в южной части Казахстана и семь — в северной [6]. Приоритетными были определены район № 6 (в южном Казахстане, в Джезказганской области, с координатами центра 47,33° с. ш. и 69,58° в. д.) и район № 1 (в северном Казахстане, в Астанинской области, с координатами центра 51,00° с. ш. и 67,17° в. д.). Приоритеты использования районов посадки были определены с учетом следующих факторов:
-
• в северных районах часто возникают неблагоприятные условия для применения поисковой техники (туман, глубокий снег в ноябре, обширные площади затопления при таянии снега в марте, апреле);
-
• ежегодно проводимые интенсивные сельхозработы (май, сентябрь);
-
• время доставки СА поисковой техникой с места посадки до аэродрома базирования в северном районе больше по сравнению с южным.
Поэтому, как правило, штатная посадка планируется на первом суточном витке в светлое время суток в район № 6. При этом резервным посадочным витком может быть второй, с посадкой в район № 1. Штатная посадка на первом суточном витке в район № 1 планируется при невозможности обеспечения посадки в район № 6, например, из-за прогноза погоды или скорости приземного ветра более 15 м/с. Для посадки на втором–четвертом суточных витках, а также в резервные даты, могут быть использованы как район № 6, так и № 1.
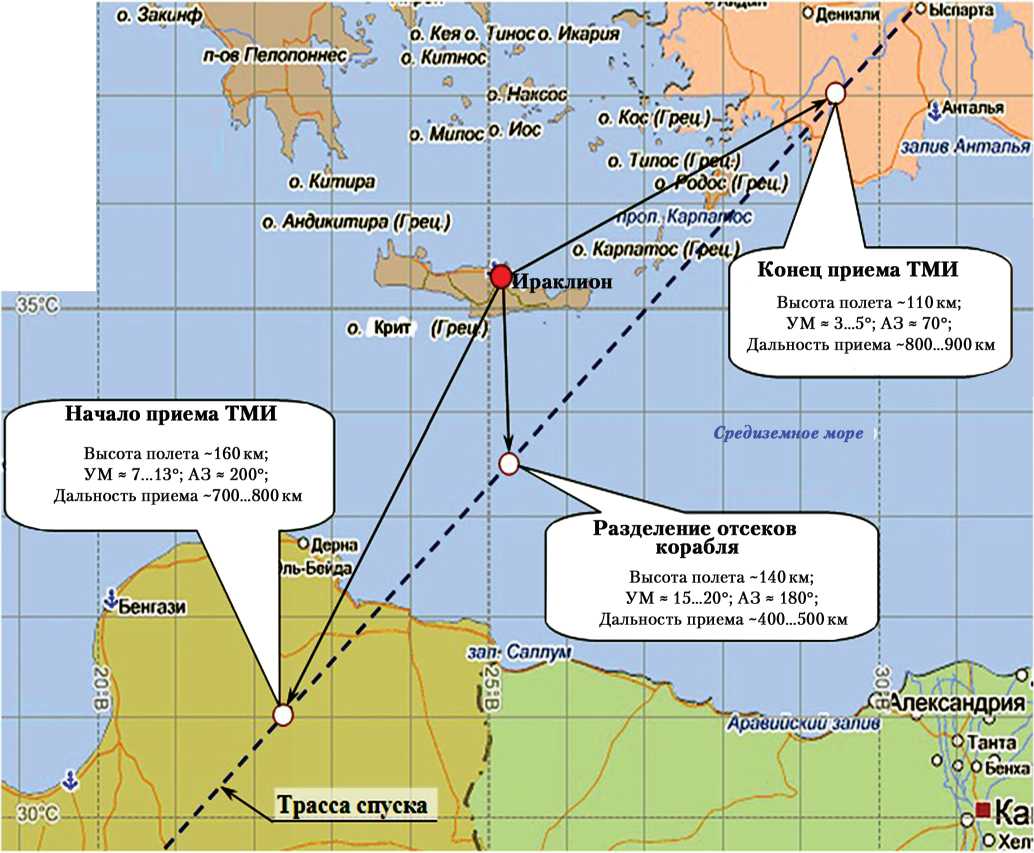
При выборе для посадки района № 6 трасса спуска и разделение отсеков корабля контролируется из Шарм-эш-Шейха, а при выборе района № 1 — с острова Крит. Соответствующие типовые трассы спуска «Союз ТМА» приведены на рис. 5 и 6.
Районы посадки СА для каждой миссии выбирались в баллистической службе РКК «Энергия» (совместно с представителями поискового спасательного комплекса). В этой же службе осуществлялся расчет целеуказаний для антенны ППНКП.

Рис. 5. Типовая трасса спуска корабля «Союз ТМА» с зоной видимости разделения отсеков корабля из г. Шарм-эш-Шейх (спуск в район № 6)
Примечание. ТМИ — телеметрическая информация; УМ — угол места; АЗ — азимут.
ОДсннзли / О Ыспарта о. Закинф п-ов Пелопоннес
о: Наксос
Милос 0 Иос
[раклион
Бенгази
>асса стека зо:с
6. Кея о. 7 иное о. Икария ) Китнос', г
Ашалья залив Анталья о® Kai ■ ОХеп
.Лроп • Kapnantoc о Карпатос (ГфецУ^
зап- Саппум, .м1--/ о Кос (Грец ) 4
о. 1 unoc (I рей ОхР^бс
^оХлександрия
"Аравийский залив v ' ^
ОТанта
С ОЙнха
О Дерна ль-Бойда/ о. Китира о. Андикитира (Грец.)
о. Крит (Гpeir)
Начало приема ТМИ
Средиземное море
Высота полета -160 км;
УМ = 7...13°; АЗ = 200°;
Дальность приема -700...800км
Конец приема ТМИ
Высота полета -110 км;
УМ = 3...5°; АЗ = 70°;
Дальность приема -800...900 км
Разделение отсеков корабля
Высота полета -140 км;
УМ = 15...200; АЗ = 180°;
Дальность приема -400...500 км
Рис. 6. Типовая трасса спуска корабля «Союз ТМА» с зоной видимости разделения отсеков корабля с о. Крит (спуск в район № 1): Примечание. ТМИ — телеметрическая информация; УМ — угол места; АЗ — азимут.
Эксплуатация ППНКП
В начале 2011 г. были заключены контракты на размещение ППНКП: в Египте — с фирмой MEROfS & T и в Греции — с администрацией Критского университета. По результатам рекогносцировок в Египте и Греции были определены места установки ППНКП. В Египте была выбрана открытая площадка вблизи гостиницы проживания персонала ППНКП на берегу Красного моря (координаты 27,98 ° с. ш. и 24,38 ° в. д.), а в Греции на о. Крит — крыша университета в г. Ираклион (координаты 35,31 ° с. ш. и 25,08 ° в. д.).
Фотографии расположения ППНКП в Египте (г. Шарм-эш-Шейх) и на о. Крит (г. Ираклион) приведены на рис. 7 и 8, соответственно.
С марта по ноябрь 2011 г. были успешно проведены четыре экспериментальных сеанса связи по приему полного потока ТМИ с кораблей «Союз ТМА» на участке спуска с орбиты с контролем разделения отсеков корабля и передачей ТМИ в ЦУП в реальном масштабе времени по 3G-сети Интернет местного оператора. При первых командировках в Египет и Грецию ППНКП каждый раз доставлялся в точку базирования с последующим возвратом, а затем контракты были дополнены соглашением о хранении ППНКП в г. Шарм-эш-Шейх и на о. Крит с ответственностью за хранение египетских и греческих представителей.
Была отработана технология подготовки аппаратуры для обеспечения надежного приема ТМИ по разделению отсеков корабля, в т. ч. расчет целеуказаний для ручного наведения антенны ППНКП и включение передатчика ТМИ корабля вне зоны связи с территорией РФ. В эту технологию входило:
-
• проведение тренировочных сеансов связи с кораблем «Союз» в составе МКС с помощью технологического комплекта ППНКП на территории РКК «Энергия» до отлета в командировку;
-
• после прилета персонала ППНКП в точку базирования проведение не менее двух сеансов связи с кораблем «Союз», еще пристыкованным к МКС, с передачей ТМИ в реальном масштабе времени в ЦУП.

Рис. 7. Место приема телеметрической информации в г. Шарм-эш-Шейх (Египет)

Рис. 8. Место приема телеметрической информации в г. Ираклион (Греция)
Была также разработана методика надежного ручного наведения антенны ППНКП на КА.
По положительным результатам работ с ППНКП в 2011 г. и в связи с важностью получения ТМИ на участке спуска кораблей «Союз ТМА» было принято решение о переводе ППНКП из экспериментального использования в штатный режим применения (приказ ГК № 26 от 30.01.2012 г.), и уже в сентябре 2012 г. РКК «Энергия» из ЗАО «НПЦ «МЕРА» был получен первый штатный комплект ППНКП с ЗИП.
Всего за период с марта 2011 г. по июнь 2015 г. был обеспечен прием ТМИ по разделению отсеков корабля при 18 спусках кораблей «Союз ТМА» с ОИСЗ, из них 12 раз при размещении ППНКП в Египте и шесть раз — в Греции. По всем спускам ТМИ в реальном масштабе времени надежно передавалась в ЦУП по сети Интернет. В табл. 2 приведен перечень контролируемых спусков «Союз ТМА» с октября 2010 г. по июнь 2015 г.
Таблица 2
Контролируемые спуски кораблей «Союз ТМА»
|
Миссия |
Дата запуска |
Дата посадки |
Район посадки, № |
|
«Союз ТМА-М» |
08.10.2010 г. |
16.03.2011 г. |
1 |
|
«Союз ТМА-20» |
15.12.2010 г. |
24.05.2011 г. |
6 |
|
«Союз ТМА-21» |
05.04.2011 г. |
16.09.2011 г. |
6 |
|
«Союз ТМА-02М» |
08.06.2011 г. |
22.11.2011 г. |
1 |
|
«Союз ТМА-22» |
14.11.2011 г. |
27.04.2012 г. |
1 |
|
«Союз ТМА-03М» |
21.12.2011 г. |
01.07.2012 г. |
6 |
|
«Союз ТМА-04М» |
15.05.2012 г. |
17.09.2012 г. |
6 |
|
«Союз ТМА-05М» |
15.07.2012 г. |
19.11.2012 г. |
1 |
|
«Союз ТМА-06М» |
23.10.2012 г. |
16.03.2013 г. |
1 |
|
«Союз ТМА-07М» |
19.12.2012 г. |
14.05.2013 г. |
6 |
|
«Союз ТМА-08М» |
29.03.2013 г. |
11.09.2013 г. |
6 |
|
«Союз ТМА-09М» |
29.05.2013 г. |
11.11.2013 г. |
6 |
|
«Союз ТМА-10М» |
26.09.2013 г. |
11.03.2014 г. |
6 |
|
«Союз ТМА-11М» |
07.11.2013 г. |
14.05.2014 г. |
6 |
|
«Союз ТМА-12М» |
26.03.2014 г. |
11.09.2014 г. |
6 |
|
«Союз ТМА-13М» |
28.05.2014 г. |
10.11.2014 г. |
1 |
|
«Союз ТМА-14М» |
26.09.2014 г. |
12.03.2015 г. |
6 |
|
«Союз ТМА-15М» |
24.11.2014 г. |
11.06.2015 г. |
6 |
Разделение отсеков корабля на всех перечисленных контролируемых спусках было штатным, а режим спуска — управляемым.
Заключение
Для приема ТМИ с корабля «Союз ТМА» при движении по траектории вне зон связи со станциями слежения НКУ на территории РФ создан портативный переносной комплекс приема ТМИ. Масса аппаратуры комплекса с приемной антенной — не более 15 кг, что позволяет использовать его в мобильном варианте с электропитанием как от стационарной сети 220 В, так и от автомобильного аккумулятора.
Дальность приема ТМИ (256 кбит/с) через ППНКП составила не менее 1 000 км. Передача принятой ТМИ в ЦУП осуществлялась через сеть Интернет, что позволило не применять сложную систему связи и передачи данных, используемую для связи станций слежения НКУ с ЦУП.
В 2011…2015 гг. ППНКП надежно обеспечил прием ТМИ на всех спусках кораблей «Союз ТМА» с ОИСЗ с передачей ТМИ в ЦУП в реальном масштабе времени.
Особую признательность авторы выражают руководству отделения НКУ РКК «Энергия» Бродскому И.Э., Герасимову А.В. и руководству отдела этого подразделения Быкову А.Д., Ковалеву А.Д. и Лидовскому П.С. за поддержку работ ППНКП в целом, организацию приемосдаточных испытаний и работ по эксплуатации ППНКП в Египте и Греции.
Авторы статьи совместно со всеми участниками, задействованными в эксплуатации ППНКП, выражают благодарность руководителю фирмы MEROfS & T Хусейну Эль Шафи (Египет) и профессору критского университета Христосу Холодукису за помощь при работе с ППНКП.
Список литературы Портативный комплекс приема телеметрической информации для передачи в центр управления полетами данных по спуску пилотируемых транспортных кораблей
- «Союз ТМА-10». Режим доступа: https://ru.wikipedia.org/wiki/Союз_ТМА-10 (дата обращения 16.07.2015 г.).
- «Союз ТМА-11». Режим доступа: https://ru.wikipedia.org/wiki/Союз_ТМА-11 (дата обращения 16.07.2015 г.).
- Телеметрическая станция «Источник-М». Руководство по эксплуатации БЛИЖ. 401270.001.002 РЭ. НПП МЕРА, 2008. Режим доступа: www.nppmera.ru/assets/files/documentation/RE%20Istochnic-M.pdf (дата обращения 14.01.2015 г.).
- ТМ Регистратор. Программное обеспечение. Руководство оператора. НПП МЕРА, 2010. Режим доступа: http://www.nppmera. ru/assets/files/tm-registrator/TMRegistrator.pdf (дата обращения 14.01.2015 г.).
- Кравец В.Г. Особенности контроля и управления полетом ракеты космического назначения по программе «Морской старт»//Космическая техника и технологии. 2014. № 2(5). С. 74-86.
- Соболев А.В. Теория надежности в системе поисково-спасательного обеспечения на этапе посадки спускаемого аппарата//Наука и современность. 2015. № 36. С. 123-128. Статья поступила в редакцию 03.12.2015 г.
