Постобработка СЗМ-изображений решением обратных задач

Автор: Михайлов М.А., Манойлов Владимир Владимирович
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Системный анализ приборов и измерительных методик
Статья в выпуске: 2 т.24, 2014 года.
Бесплатный доступ
В статье анализируются факторы, вносящие искажения при проведении исследования топологии поверхности при использовании сканирующего зондового микроскопа, и предлагаются методы устранения их влияния в процессе постобработки изображений. Особое внимание уделяется решению прямой и обратной задач при исследованиях параметров системы автоматического регулирования сканера и его аппаратной функции.
Сзм, решение обратной задачи, аппаратная функция, пьезосканер
Короткий адрес: https://sciup.org/14264931
IDR: 14264931 | УДК: 681.2-5
Post-processing of SPM-images by the calculation of inverse tasks
The article analyzes the factors that introduce distortions on surface topology investigating using a scanning probe microscope and suggests methods to eliminate their influence on post-processing images. Furthermore the answer to direct and inverse problems on investigating automatic control system parameters and scanner hardware functions is generally examined.
Текст научной статьи Постобработка СЗМ-изображений решением обратных задач
При проведении исследований топологии поверхности с использованием сканирующих зондовых микроскопов могут возникать различные по физической природе и форме явления, искажающие топологию поверхности. В данной работе проводится исследование различных факторов, вносящих искажения, и указываются способы их устранения.
Проблему влияния искажений можно решить несколькими путями.
-
1. Изменять конструкцию отдельных узлов сканирующего зондового микроскопа, повышая точность измерений, и минимизировать влияние помех аппаратными средствами.
-
2. Производить обработку измерительного сигнала, повышая соотношение сигнал—шум.
Первый путь решения проблемы связан с дорогостоящей научно-исследовательской работой и большими затратами на производство новых узлов. Второй метод позволяет с меньшими затратами улучшить результаты измерений на существующем оборудовании. Обработку сигналов можно производить при помощи аналоговых методов и соответствующих устройств. Альтернативой аналоговым методам являются цифровые методы обработки сигналов. Цифровые методы обладают более богатым разнообразием алгоритмов и возможностей. Кроме того, цифровые методы позволяют производить обработку не только в процессе измерения, но и после эксперимента — постобработка. Цифровые методы также обладают возможностью простого изменения параметров алгоритма обработки сигналов и самого алгоритма автоматического управления сканером при малых временных и материальных затратах по сравнению с аналоговыми методами. При использовании аналоговых методов обработки сигналов изменение параметров алгоритмов управления и алгоритмов обработки сигналов сопряжено с изменением принципиальной электрической схемы. С помощью цифровых методов возможно проще добиться более высокой точности по причине отсутствия влияния таких факторов, как температурный дрейф и других внешних шумов.
б
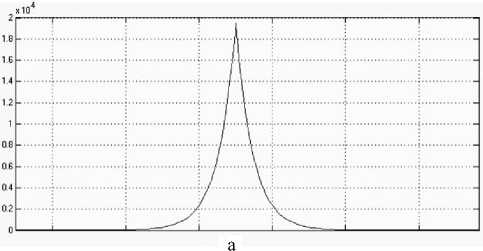
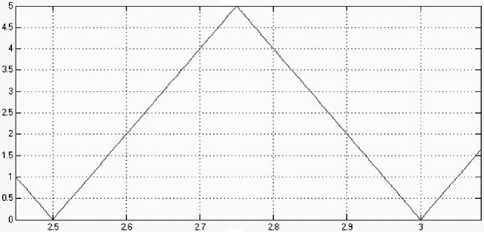
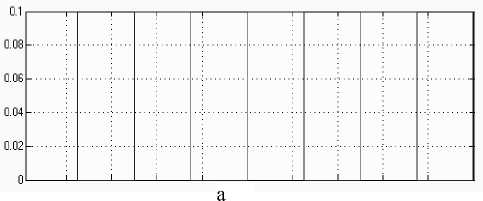
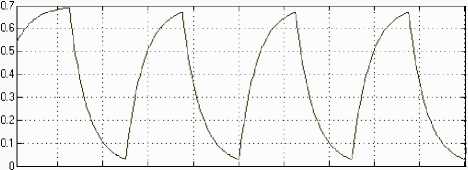
Рис. 1. Искажение треугольной структуры.
a — искаженный сигнал, б — исходный сигнал
Задача работы была сформулирована следующим образом.
-
1. Оценить (по возможности, количественно) искажения в результате решения прямой задачи в управлении сканером с учетом действия шумов и помех.
-
2. Наметить пути и разработать алгоритмы решения обратной задачи, в том числе с учетом параметров шумов и помех.
-
3. Разработать программное обеспечение для решения обратной задачи.
-
4. Провести количественную оценку результатов решения обратной задачи с помощью разработанных алгоритмов и программ.
При анализе помех и результатов обработки сигналов мы будем использовать критерий — близость формы сигнала по значениям невязки
5( x) = g (x) - w (x), где δ(x) — величина невязки; g(x) — измененный сигнал; w(x) — изначальный сигнал.
Анализ искажения будет проводиться в два этапа:
-
1) выявить основные эффекты, вносящие искажения, и описать математически эти искажения, т. е. решить прямую задачу;
-
2) решить математически обратную задачу, из чего получим алгоритм обработки изображения.
Разберем основные эффекты, вносящие искажения. Рассмотрим все эффекты на примере двухмерного случая — профилей поверхностей, получаемых при проходе зонда.
ТУННЕЛЬНЫЙ ЭФФЕКТ
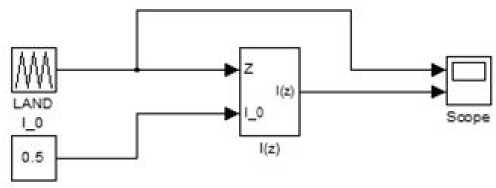
Рис. 2. Модель искажений, вносимых туннельным эффектом.
(Используемые элементы пакета моделирования: "Repeating Sequence", "Constant", "Scope", "Subsystem")
Туннельный эффект описывается формулой (1)
Г f l — f 2 f z пр ( x ) = I 0 k e I 2 ^
z ( x ),
где z пр ( x ) — искаженный профиль поверхности; I 0 — опорный ток; k — коэффициент соответствия тока и расстояния; f 1 , f 2 — работа выхода материала зонда и исследуемого образца; z ( x ) — исходный профиль поверхности [1].
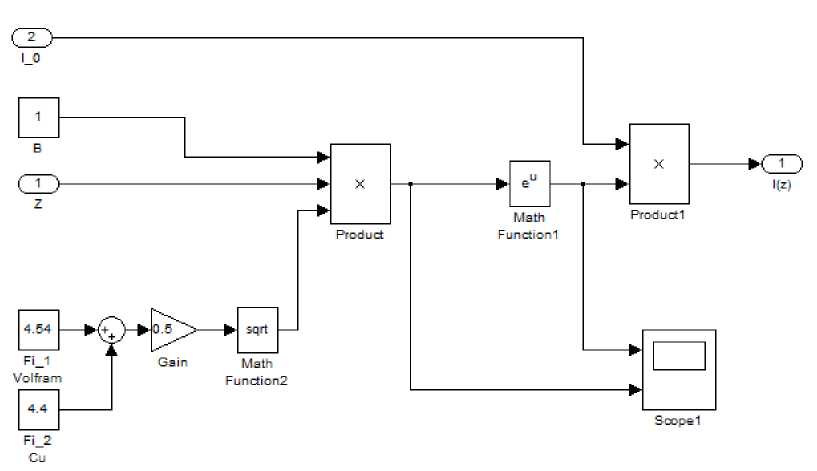
Рис. 3 . Модель туннельного эффекта.
Используемые элементы пакета моделирования: "Add", "Gain", "Math Function", "Product", "In", "Out", "Constant", "Scope", "Subsystem")
Данный эффект проявляется на плавно возрастающем профиле, например треугольной формы. Искаженный сигнал представлен на верхнем графике (рис. 1, а), а изначальный сигнал на нижнем (рис. 1, б). Моделирование произведено с помощью программного пакета MatLab Simulink.
Модель, на которой были получены сигналы рис. 1, изображена на рис. 2 и 3 [2].
Решение обратной задачи сводится к выводу из формулы (1) исходного профиля поверхности z ( x ) :
ln( z пр( x ))
z ( X ) = I 0 k 2 . (2)
Г f - f2 Y
I 2 J
ФОРМА ЗОНДА микроскопе или силовое взаимодействие в атомно-силовом микроскопе. С математической точки зрения это означает, что функции, описывающие форму зонда и поверхности, имеют больше одного решения. Начиная с этой точки в случае параболоидальной формы зонда информация о поверхности получается не кончиком зонда, а его гранью. При этом искажения имеют форму функции зонда со знаком минус.
Таким образом, форму зонда можно получить, сканируя эталонную ступенчатую структуру, отфильтровав другие шумы, или получив изображения зонда в электронном микроскопе с заведомо более высокой точностью. Зная функцию или таблицу, задающие форму зонда, можно отфильтровывать искажения, вносимые этим эффектом, находя большие перепады высот, сравнивать профиль грани с формой зонда и вычитать при необходимости.
Данный эффект промоделирован на рис. 5 и 6.
Так как зонд не является идеально тонким стержнем, а имеет форму конуса или параболоида, то форма зонда накладывает погрешность на получаемый профиль поверхности (рис. 4) [1]. Этот эффект возникает из-за взаимодействия между зондом и поверхностью помимо кончика зонда другими его поверхностями. Например, туннелирование электронов в сканирующем туннельном
а
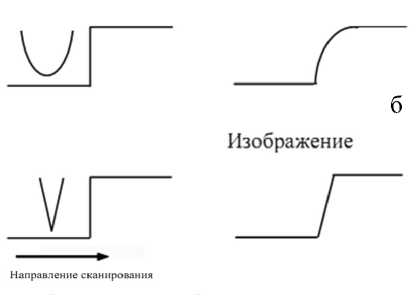
Рис. 4. Типовые искажение, вносимые формой зонда. а — профили зонда и рельефа, б — изображения
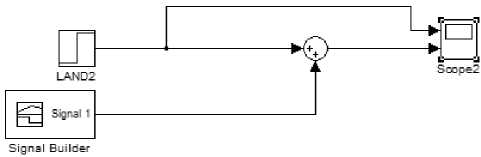
Рис. 5. Модель искажений, вносимых формой зонда
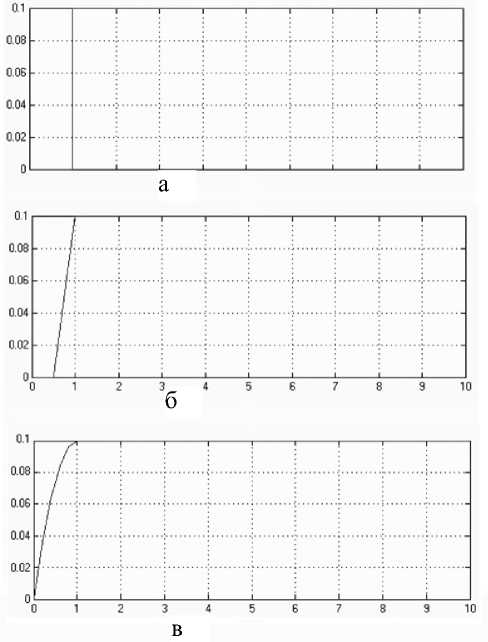
Рис. 6. Искажения, вносимые формой зонда.
а — исходный сигнал; б — искажение зондом треугольной формы; в — искажение зондом параболоидной формы
АППАРАТНАЯ ФУНКЦИЯ СКАНЕРА
Аппаратная функция сканера описывается уравнением mszs = -aszs - ks (zs - YU(t)) , (3)
где z s — смещения от положения равновесия сканера с образцом; m s , α s , k s — эффективная масса, коэффициент трения и жесткость колебательной системы сканера с образцом; U ( t ) — управляющее напряжение, приложенное к пьезоэлементу сканера; γ — чувствительность пьезосканера [3].
Зная частоту резонанса сканера (вычисляется из АЧХ сканера) и паспортные данные (масса) можно решить уравнение. Таким образом, решение данного уравнения будет являться решением прямой задачи.
Данный эффект промоделирован (прямая задача) [2] на рис. 7 и 8.
ВОССТАНОВЛЕНИЕ ПРОФИЛЯ
Сигнал реакции сканера можно представить в виде математической свертки импульсной характеристики сканера и входного сигнала — исследуемой поверхности, которая является уравнением Фредгольма 1-го рода:
g ( x ) = h ( x ) • w ( x ), (4)
+to
g ( x ) = j h ( x , ю ) w(rn )d ® , (5)
-to где w(x) — истинный профиль поверхности; h(x) — ядро уравнения (импульсная характеристика); g(x) — искаженный профиль поверхности.
По теореме Бореля, фурье-образ свертки двух функций равен произведению их фурье-образов. Т. е. если
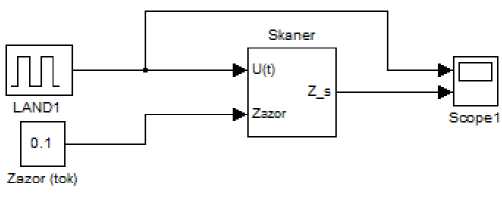
Рис. 7. Модель искажений, вносимых переходной функцией сканера
+to
H(to ) = j h ( x ) e ™ d x (6)
-to
и
+to
W(ю ) = j w ( x ) e i m x d x , (7)
-to где H(ω) — фурье-образ ядра уравнения (импульсной характеристики), W(ω) — фурье-образ исходного профиля, то
0.2 0.4 O.G 0.8 1 1.2 1.4 1.Б 1.8 2
б
Рис. 8. Искажения, вносимые переходной функцией сканера.
а — исходный профиль поверхности вида , б — искаженный
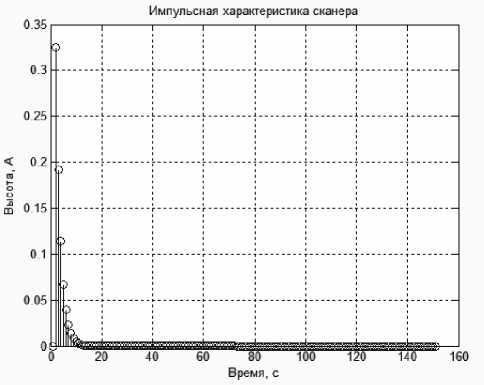
Рис. 9. Импульсная характеристика сканера h ( x )
+to
G " ) = — [ H " )W (" ) e " x d x , (8)
2n i сти функции на краях. Уменьшить этот эффект получается при помощи добавления нулевых точек с двух сторон (расширения) [5, с. 252].
где G ( ω ) — фурье-образ искаженного профиля.
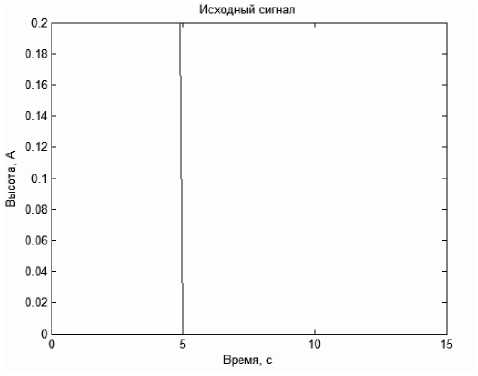
Рис. 10. Исходный профиль поверхности вида
Данное свойство дает возможность косвенного вычисления математической свертки и в дальнейшем решить обратную задачу.
Зная форму переходной характеристики сканера, подбираем подходящий полином z -функции, описывающий известную переходную характеристику. Далее получаем импульсную характеристику сканера (рис. 9) и ее фурье-образ, как в уравнении (6).
Аналогично уравнению (6) запишем фурье-образ искаженного профиля
+to
G" ) = J g ( x ) e i " x d x . (9)
-to
Тогда, решая обратную задачу методом преобразования Фурье (или инверсной фильтрации), искомый профиль поверхности можно записать в виде интегрального уравнения, исходя из уравнений (6)–(9):
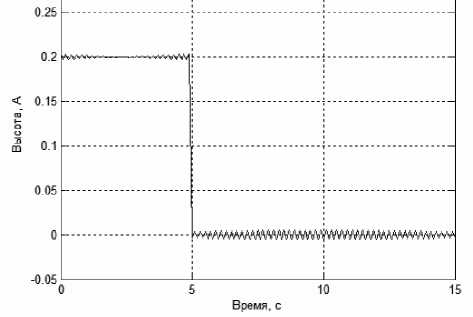
Рис. 11. Восстановленный сигнал профиля ( p = 1, α = 1·E-9, без расширения по краям)
w ( x ) = [ G"e " x d " (10)
-i h (" )
Рассмотрим поведение спектров. При | ɷ |→0, G ( ɷ ) стремится к некому константному значению "белого шума", а H ( ɷ ) → 0. Это означает, что решение методом преобразования Фурье — неустойчиво и сингулярно. [4, с. 87] При воздействии внешних шумов с некоторой дисперсией на систему неустойчивость решения повышается, т. к. каждому элементу g соответствует не единственный элемент w [5, с. 26] Для устранения неустойчивости можно использовать метод преобразования Фурье с регуляризацией Тихонова. Решение уравнения имеет вид
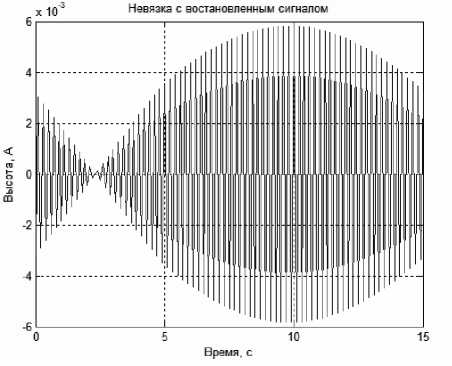
Рис. 12. Невязка исходного сигнала с восстановленным (рис. 11)
w(x) = +[ H(-")G(") e-'"xd", (11) -j\H (" )l2 +a"p , где α > 0 — параметр регуляризации, а p ≥ 0 — порядок регуляризации. При правильном выборе параметров w(x) получается достаточно близким к исходному профилю. [6] На основании вышеизложенных выводов нами было разработано программное обеспечение в среде программирования MatLab. Результаты моделирования представлены на рис. 10–12.
При решении данной задачи мы столкнулись с эффектом Гиббса (рис. 12) — "звоны", или ложные волны. Это связано с разрывом непрерывно-
ВЫВОДЫ
Выявлены параметры математических моделей следующих трех факторов, вносящих искажения в СЗМ-изображения:
-
1) влияние туннельного эффекта;
-
2) форма зонда;
-
3) аппаратная функция системы управления сканером.
Использование этих математических моделей и моделей стандартных воздействий (ступень, треугольник, прямоугольник и т. п.) позволило численно оценить параметры искажений, вносимых рассмотренными факторами, т. е. результаты решений прямых задач. Устранение рассмотренных искажений было выполнено путем решения обратных задач методом Тихонова с различными параметрами регуляризации. Устранение искажения с помощью предложенных алгоритмов предполагается реализовать в программном обеспечении постобработки изображений, полученных методом сканирующей зондовой микроскопии.
