Построение алгоритма распознавания образов в сервисе автомобильных экосистем с применением оператора деконволюции

Автор: Маковецкая-Абрамова Ольга Валентиновна, Маковецкий Валентин Архипович, Силла Светлана Александровна
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 3 (9), 2009 года.
Бесплатный доступ
Исследованы возможности гомоморфных преобразований в создании репрезентативного набора признаков. Разработан алгоритм дополнительной математической обработки пространственно-временных сигналов с применением оператора деконволюции. Идентифицированы транспортные средства по собственному оптическому сигналу в потоке высокой интенсивности движения.
Распознавание образов, гомоморфные преобразования, свёртка сигналов, оператор деконволюции, идентификация транспортных средств
Короткий адрес: https://sciup.org/148185793
IDR: 148185793 | УДК: 656.021.8
Текст научной статьи Построение алгоритма распознавания образов в сервисе автомобильных экосистем с применением оператора деконволюции
Одним из важных условий современной жизни является вопрос организации работы транспорта, от эффективности которой зависят все области экономики. Организация дорожного движения в условиях поставленной задачи должна осуществляться автоматическими системами, адаптированными к изменению количественного и качественного состава транспортного потока (ТП). Системы должны осуществлять управление в реальном времени, быть надежными в работе, при значительных помехах нагруженной магистрали (пыль, вибрация, шум), в неблагоприятных метеоусловиях (снег, дождь, туман и т.д.), настроенными на пассивный режим работы, иметь малые габариты. Оптимизация транспортных потоков путем управления движением на всей дорожной сети региона позволит существенно увеличить пропускную способность дорог, улучшить экологическое состояние городов, уменьшить количество ДТП, заторов, увеличить срок эксплуатации автомобилей. Современный мониторинг транспортных потоков требует значительных экономических затрат. Высокая стоимость существующих методов исследования транспортных потоков, сложность обслуживания и прочие факторы не позволяют пока широко использовать их на практике. Необходимы устройства, имеющие низкую стоимость, простоту эксплуатации и обслуживания, монтаж которых возможен в рабочей зоне дороги без нарушения коммуникаций и без вскрытия дорожного полотна, пригодные для серийного изготовления, способные в реальном времени и с высокой степенью надежности оценивать количество и типы транспортных средств – решать проблему распознавания образов. При распознавании входная информация в виде признаков распознаваемых образов должна быть преобразована в выходную, представляющую собой заключение о том, к какому классу относится распознаваемый объект. В связи с большим разнообразием условий и характеров объектов распознавания математически строгий метод и универсальный подход к их решению маловероятен.
Выбор в качестве параметров распознавания тех или иных физических величин определяется:
-
а) инвариантностью параметров к всевозможным преобразованиям;
-
б) простотой устройства измерения выбранных параметров и преобразования их в код, удобный для использования в системе принятия решений;
-
в) устойчивостью параметров при возможных мешающих воздействиях, то есть помехоустойчивость параметров;
-
г) сложностью обучения распознающей системы.
Таким образом, при управлении транспортными потоками необходима регистрация параметров транспортных потоков в реальном времени за доли секунды до принятия решения. В данных условиях полная обработка образа транспортного средства (ТС) не представляется возможной, от обработки образов классическими методами, используемыми в медицине, криминалистике и т.д., приходится отказаться и перейти к методам получения информации по характерным признакам образа, тесно связанным с видом транспортного средства. Репрезентативный набор признаков должен обеспечить идентификацию с высокой степенью надежности и малой вероятностью ошибки в условиях высокого уровня оптических, акустических и других помех.
Построение математических алгоритмов обработки пространственновременных сигналов с целью выявления характерных признаков образов и последующей идентификации предполагает знание гомоморфных преобразований. В работах [1,2,3] подробно изложена методика гомоморфной обработки пространственно-временных сигналов. Применение гомоморфной обработки пространственно-временных сигналов также перспективно в системах распознавания образов транспортных средств. Существуют два способа описания произвольного сигнала [4]. Первый способ основан на математическом представлении сигнала в виде y f ( t ) , где независимая переменная t – время. Математическое представление по второму способу имеет вид Y F ( v ) , где независимая переменная – частота (размерность обратна размерности t ). Эти два представления сигнала связаны друг с другом преобразованием Фурье. Следовательно, использование методов обработки сигнала требует знания свойств преобразования Фурье. Если x(t) – периодическая функция от t c периодом T , то её можно представить в виде:
x(t) = a0 + У(a cos2^nt +... 2 nT n1
... + b „ sin 2е- nt ). (1)
Непериодическую функцию можно рассматривать как предел периодической функции с периодом T при T . Тогда частотный интервал vQ = 1 / T стремится к нулю и спектр становится непрерывным:
x
(
t
) = Je2”
^dv
j
x
(
X ( v )= j x ( t )e "2л / v t dt . (3)
Функция X(v) называется Фурье- образом функции x(t) [4].
Сигналы объединяются при помощи свёртки [5]. Свёртка – это опера- ция, которая всегда регистрируется измерительными приборами и в результате которой получается размытое (неясное) изображение изучаемого объекта. Вне зависимости от конструкции входного устройства сигнал S(t), регистрируемый детектором, представляет собой свертку собственного сигнала ТС e(t) с импульсной характеристикой (полем зрения) растра e(t). Любой входной сигнал изменяет свою форму на выходе. Сигнал на выходе, соответствующий импульсу, бесконечно малой продолжи- тельности на входе, называется импульсным откликом [4]. Зная импульсный отклик e(t), можно по входящему сигналу e(t) рассчитать выходной сигнал S(t). Решение этой задачи осуществляется с помощью свёртки. Уравнение свёртки имеет вид:
S (t ) = e( t )• h( t);(4)
S (t )= je(T> h (t- t) dT;(5)
S(t) e( )h(t )d ;(6)
S (t )= je (t) h (t- t) di.(7)
Сигнал на выходе равен сумме всех откликов. Преобразование Фурье свертки двух функций равно произведению изображений функций, составляющих свертку и наоборот. Согласно теореме Планшереля справедливо соотношение:
e ( t )• h ( t )<---- > E ( v ) H ( v ) , (8)
т.е. спектр от свертки есть произведение спектров [6]. Данное соотношение используется в кепстральном анализе регистрируемых сигналов. Кепстральный анализ связан с разделением свернутых сигналов и функций, и его основное на-
Построение алгоритма распознавания образов в сервисе автомобильных экосистем с применением оператора деконволюции значение определяется физическим происхождением этих сигналов и функций.
Численная реализация на ЭВМ процедуры вычисления кепстра дискретной последовательности x(n) конечной длины N с использованием дискретного преобразования Фурье рассмотрена в работе [14] и имеет вид:
Таким образом, алгоритм распознавания усложняется. В случае регистрации с близкого расстояния достаточно наличия свертки S ( t ) , при регистрации с большого расстояния требуется произвести выделение собственного сигнала регистрируемого объекта путём применения оператора деконволюции.
-
M ^1 jj - nk
X ( k ) = ^ X ( n ) e N ;
X Re ( k ) = log X ( k )|;
M 4 i—nk
j nk
C p ( n ) = T E x Re ( k V" = -
Nk
+oo
-
••• = ^ C ( n ± mN ); m = 0,1,2V„
n
Решение задачи таксономии при- менительно к ТП состоит в построении автоматического классификатора транспортных средств. Совокупность операций по построению такого классификатора можно разбить на две части:
-
1. Регистрация образа транспортного средства и его идентификация ТС.
-
2. Создание программы автома-
тического распознавания.
Регистрация оптического образа автомобиля возможна путём применения растрового оптико-электронного датчика [7,8]. Для идентификации автомобиля необходимы признаки образа, определяющие принадлежность ТС к тому или иному классу.
В ходе экспериментов была обнаружено, что установить детектор в непосредственной близости от исследуемых объектов не всегда представляется возможным. В случае регистрации с больших расстояний свёртка S(t ) теряет информативные качества и идентификация усложняется. Разработанная методика дополнительной математической обработки регистрируемых сигналов предполагает применение оператора деконволюции. Оператор деконволюции позволяет исключить из S(t ) импульсную характеристику h(t ) , оставив собственный сигнал ТС e(t) в чистом виде, без искажающего влияния передаточной функции приёмника.
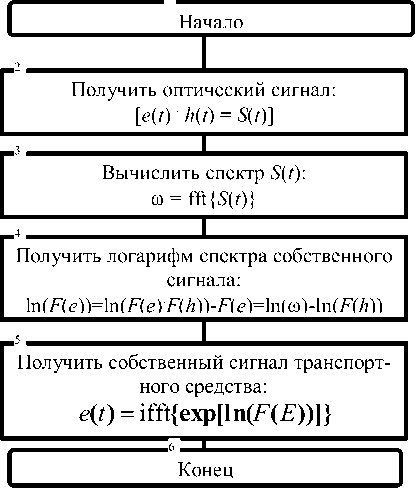
Рисунок 1 Функциональная схема алгоритма оператора деконволюции

б)
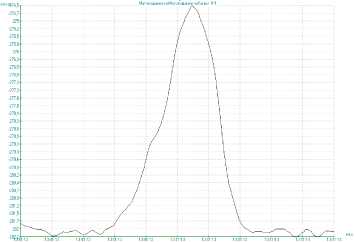
Рисунок 2. Результат регистрации оптического образа автомобиля “ВАЗ-2121”-«Нива»: а - изображение автомобиля; б -оптический образ
Для проведения операции деконволюции воспользуемся теоремой Планшереля, согласно которой спектр от свертки есть произведение спектров. Функциональная схема алгоритма деконволюции сигналов представлена на рис.1, фотография оптический образ автомобиля на рис.2.
Программа деконволюции, созданная и работающая в Mathcad 2000 Professional, представлена на рис.3. Время обработки сигнала менее одной секунды.
Алгоритм деконволюции оптического образа автомобиля
i := 0.. nolp - 1
Dj := val i := nolp - 1.. nolp - 1 + length (D1) - 1
Oj = 01 i-(nolp-l)
I := nolp - 1 + length[01).. nolp - 1 + length(01) + norp - I
О, := val
i := 0.. length (S) - 1
Xi
j := 0.. length(D) - 1 x1, := i
i := 0.. nop
SS, := s(y(i))
ms := max(SS)
SS, SS, :=----
d(y) := Iinterp(x1 ,D,y) nop,233 y1(d) „ dJeng*h(D)-l nop
DDi:=d(y1(i)) md := max(DD)
DO;
ss.
I SS, if SS, > cs
DDi
DDi
I DDi if DDi ^ cs CS := 0 2
cs otherwise
cs otherwise
W := ifft(exp(ln(fft(SS)) - ln( fft(DD)})) i := 0.. nop
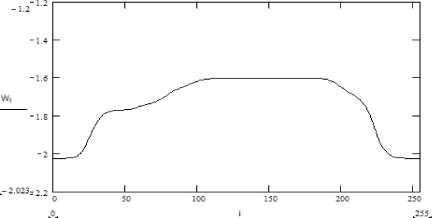
Применение данного алгоритма позволяет идентифицировать ТС по собственному оптическому сигналу в потоке с высокой интенсивностью движения. Применение алгоритма особенно эффективно в случае отсутствия возможности регистрации оптических сигналов в непосредственной близости от дорожного полотна.
