Построение алгоритмов управления движением спутника-инспектора в окрестности Международной космической станции

Автор: Алексеев А.В., Ефременкова В.В.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Системы и устройства телекоммуникаций
Статья в выпуске: 4 (92) т.23, 2025 года.
Бесплатный доступ
В статье рассмотрена двумерная задача сближения спутника-инспектора с Международной космической станцией. Для моделирования движения спутника сформирована математическая модель, учитывающая работу его двигательной установки, а также определена область для его безопасного маневрирования в окрестности станции с учетом ее конструкции и габаритов. Построены маршруты движения инспектора для выполнения задачи облета станции и последующего зависания возле одного из ее стыковочных узлов. Выполнено математическое моделирование двух алгоритмов управляемого движения спутника-инспектора для разных двигателей малой тяги. Вычислены отклонения координат и скоростей спутника от заданных значений, определены временные интервалы работы двигательной установки. Проведен сравнительный анализ применяемых алгоритмов управления в соответствии с затратами топлива и точностью маневрирования спутника-инспектора.
Спутник-инспектор, Международная космическая станция, математическая модель, уравнения Клохесси-Уилтшира, двигательная установка, сближение, метод свободных траекторий, двухимпульсный маневр, облет, орбитальная система координат, алгоритм управления
Короткий адрес: https://sciup.org/140314011
IDR: 140314011 | УДК: 629.7 | DOI: 10.18469/ikt.2025.23.4.04
Construction of algorithms for motion control of an inspector satellite in the vicinity of the International Space Station
The article is devoted to the two-dimensional problem of bringing an inspection satellite closer to the International Space Station. In order to simulate the satellite’s motion, a mathematical model that takes into account the operation of its propulsion system was presented, with determination of the area for its safe maneuvering in the station vicinity, taking into account its design and dimensions. The routes of the inspector’s movement in order to perform the task of circling the station and then hovering near one of its docking nodes, were developed. Mathematical modeling of two algorithms for the controlled motion of an inspection satellite for different thrusters has been performed. Deviations of the coordinates and velocities of the satellite from the set values are calculated, and time intervals for the operation of the propulsion system are also determined as well. A comparative analysis of the applied control algorithms concerning fuel consumption and accuracy of performing maneuvers of the of the satellite inspector motion is provided.
Текст научной статьи Построение алгоритмов управления движением спутника-инспектора в окрестности Международной космической станции
Совершенствование методов сближения и стыковки космических аппаратов остается одной из наиболее важнейших задач в развитии космической техники и освоении космоса. Такая необходимость обусловлена широким спектром задач, решаемых в рамках реализации космических программ, в том числе, путем наблюдения и проведения ремонтных работ на неисправных космических аппаратах (КА).
Среди методов управления сближением КА выделяют отдельную группу методов, основанных на исследовании законов орбитального движения КА по кеплеровым орбитам [1]. Поскольку при применении методов этой группы не накладывается никаких ограничений на вектор относительного положения центра масс КА, то основную часть траектории сближения КА в этом случае представляют собой участки свободного орбитального движения; соблюдение заданных конечных условий обеспечивается последовательной коррекцией траектории. В процессе коррекции движения центра массы КА предполагается, что управляющие воздействия прикладываются в определенные моменты времени, а также имеет место импульсный характер действия тяги двигателей. Поэтому методы сближения, основанные на использовании законов орбитального движения, сводятся к методам импульсной коррекции. При реализации импуль- сных методов управления сближение аппаратов и конечное выравнивание скоростей достигается за счет приложения отдельных импульсов тяги, величина которых рассчитывается на основании данных измерений параметров относительного движения КА.
Наиболее известным и простым из импульсных методов является метод свободных траекторий, при котором каждый из корректирующих импульсов определяется из условий сближения КА с «целью» через некоторое время свободного полета [2]. Частным случаем метода свободных траекторий является двухимпульсный метод сближения, основным недостатком которого является неизбежность ошибок при определении величины и направления первого корректирующего импульса, что может привести к значительным отклонениям. В результате требуемая точность сближения не может быть обеспечена без проведения дополнительных промежуточных коррекций, вследствие чего возникает необходимость реализации многоимпульсного метода сближения. В частности, такой метод был реализован на американском КА «Аполлон» [3].
В связи с существующей актуальностью исследования орбитального сближения двух КА проведено математическое моделирование движения некоторого КА в окрестности Международной космической станции (МКС) при помощи разработанных алгоритмов управления, целью

которых является повышение точности выполнения сближения корректирующими маневрами.
Постановка задачи
Пусть роль КА, сближающегося с МКС, будет выполнять спутник-инспектор (СИ) – т.е. малый космический аппарат, способный принимать и передавать данные, а также проводить бесконтактную диагностику неисправностей при помощи фото- и видеосъемки.
Примем МКС и СИ за материальные точки, вращающиеся вокруг Земли по орбитам радиуса R 0 и r соответственно. При этом расстояние между ними будет считаться намного меньше радиуса орбиты станции р<< R 0 [4]. Движение инспектора будем рассматривать в подвижной орбитальной системе координат (ОСК), начало отсчета которой поместим в центре масс МКС (рисунок 1).
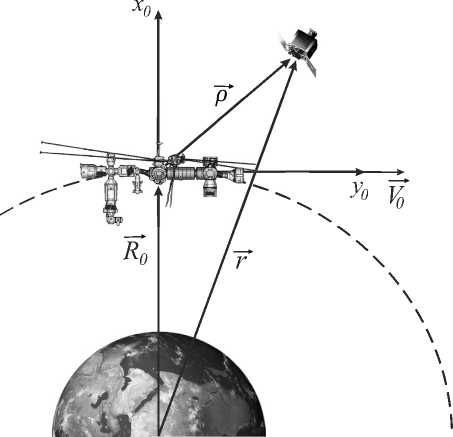
Рисунок 1. Система координат
Учитывая требования, установленные в Спецификации Российского сегмента (РС) МКС на движение КА в окрестности МКС, определим зону безопасного облета МКС для СИ за пределами окружности радиуса 200 м, проведенной из центра ОСК. Так как на РС МКС находятся четыре узла для стыковки космических кораблей, то движение СИ внутри установленной окружности разрешено в четырех конусах с углом полураствора 10° относительно оси каждого стыковочного узла и в полукольце, проведенном из выбранного узла стыковки. Меньший радиус полукольца составляет 40 м, а больший – 60 м (рисунок 2) [5].
Поставим перед СИ следующую задачу: облететь МКС, начав движение из положения 4, и закончив зависанием возле узла стыковки модуля Звезда, то есть в положении 0 (рисунок 2).
Разобьем весь полет СИ на отдельные участки, называемые маршрутами. Каждый маршрут характеризуется своей начальной и конечной точками, расположенными строго на осях ОСК. В целях решения поставленной задачи и с учетом необходимости соблюдения установленных ограничений на маневрирование, в таблице 1 определим следующие маршруты для полета инспектора.
Таблица 1. Маршруты движения СИ
|
Маршрут |
Точка старта |
Точка назначения |
|
4–3 |
4: (–250; 0) |
3: (0; 250) |
|
3–2 |
3: (0; 250) |
2: (250; 0) |
|
2–1 |
2: (250; 0) |
1: (0; –250) |
|
1–0 |
1: (0; –250) |
0: (–3,53; –65,88) |
Для обеспечения непрерывного облета станции необходимо, чтобы каждый маршрут являлся продолжением предыдущего, формируя единую, замкнутую траекторию облета. Поэтому конечные координаты и скорости, описывающие положение СИ в конце каждого маршрута, будут приниматься в качестве начальных условий для построения траектории движения по следующему маршруту в их установленной последовательности.
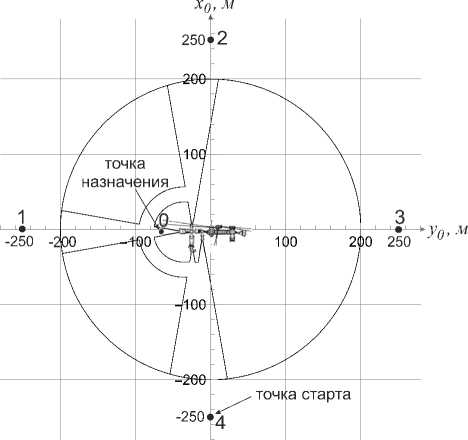
Рисунок 2. Коридоры подхода и граница безопасной области движения СИ в окрестности МКС
Математическая модель
Управляемое движение СИ будет моделироваться при помощи классических уравнений относительного орбитального движения, известных как уравнения Клохесси-Уилтшира [6]:
x ( t ) = 3 ^ о2 x ( t ) + 2 a о y ( t ) + f x ;
y ( t ) = - 2 a 0 x ( t ) + f y ; (1)
z ( t ) = -a 02 z ( t ) + f z ;
где ^ 0 =
GM
R 03
– средняя угловая скорость МКС по ее орбите вокруг Земли;
G – гравитационная постоянная;
M – масса Земли;
R 0 – радиус орбиты МКС;
fx , fy , fz – компоненты управляющей силы.
Эти уравнения описывают движение «пре- следователя» относительно «цели» и служат для предварительного планирования программ по сближению КА, поэтому получили широкое распространение и уже находили применение во многих исследованиях, например, в работах [7–10].
В случае, когда f x = 0, f y = 0, f z = 0, система (1) описывает пассивное движение СИ, которое будем называть движением без управляющего воздействия, или движением по номинальной траектории [11].
Моделирование траектории движения СИ осуществляется по методу свободных траекторий, который обеспечивается двумя программными импульсами тяги. Реализация двухимпульсного маневра сближения с мгновенной выдачей импульсов, посредством которого будет прогнозироваться номинальная траектория движения спутника, описана в работе [4]; а этапы маневра сближения с управляющим воздействием определены в работе [5].
Выбор двигательной установки
Так как полет СИ будет состоять из серии импульсных маневров, которые характеризуются изменением скорости инспектора под действием управляющей силы, то в его конструкции необходимо предусмотреть наличие двигательной установки (ДУ).
Чтобы определиться с выбором наиболее подходящей ДУ для выполнения поставленной задачи, следует провести сравнительный анализ траекторий движения СИ, смоделированных с использованием разных ракетных двигателей малой тяги, отличающимися своими техническими характеристиками. Такой анализ позволит выявить двигатель, который точнее обеспечит требуемые параметры движения СИ при облете МКС.
Для проведения численного моделирования было выбрано два ракетных двигателя малой тяги, которые, в первую очередь, характеризуются компактностью и малым весом: газовый – МД08 и жидкостный – РДМТ10. В таблице 2 приведены их основные технические характеристики [12].
В данной работе для полного контроля над положением СИ в трех плоскостях ОСК будет использован декартовый способ управления, который предполагает установку шести двигателей по трем взаимно перпендикулярным осям, связанным с корпусом СИ.
Алгоритм управляемого движения спутника-инспектора
Пусть в начальный момент времени относительная скорость между СИ и МКС отсутствует, то есть объекты исследования находятся в состоянии покоя относительно друг друга.
В таблице 3 представлены результаты численного моделирования, на основании которых были проанализированы отклонения, возникающие в конечных точках установленных маршрутов.
Полученные результаты демонстрируют преимущества двигателя РДМТ10 при обеспечении требуемого положения и скорости СИ близкой к нулевой в конечных точках маршрутов. Чтобы двигатель МД08 обеспечивал необходимую точность, необходимо провести детальный анализ результатов моделирования каждого маршрута и внести изменения в алгоритмы управления.
Таблица 2. Технические характеристики двигателей
|
Параметр |
Двигатель МД08 |
Двигатель РДМТ10 |
|
Рабочее тело |
Азот |
НДМГ/АТИН |
|
Средняя номинальная тяга, Н |
0,819 |
12 |
|
Средний номинальный удельный импульс, м/с |
716,1 |
2894 |
|
Средний минимальный импульс за включение, Н·с |
0,043/0,039 |
0,2 |
|
Время включения, с |
0,050…100 |
0,020…10 000 |
|
Максимальная масса, кг |
0,25 |
0,35 |
|
Ресурс по включениям, кол-во включений |
80 000 |
450 000* |
* Прогнозируется для подтверждения при наземной экспериментальной отработке
Одним из ключевых критериев, определяющих эффективность работы ДУ, является время ∆ t , затраченное каждым двигателем на выполнение маневров разгона и торможения в течение всего времени движения СИ. Этот показатель напрямую связан с затратами топлива, и, как следствие, с общей продолжительностью работы СИ, ведь чем меньше расход топлива в единицу времени, тем дольше спутник сможет проработать без пополнения ресурсов.
Чтобы обеспечить корректное проведение анализа, при моделировании движения с поочередным использованием выбранных двигателей время полета t k не изменялось. Кроме того, было выполнено одинаковое количество включений каждого двигателя на всех маршрутах полета. Это означает, что различия в суммарном времени работы двигателей обусловлены исключительно продолжительностью их работы при каждом отдельном включении (таблица 4).
Анализ данных, представленных в таблице 4, позволяет сделать вывод о неэффективности применения МД08 для изменения скорости СИ в сравнении с РДМТ10 с точки зрения затрат топлива. РДМТ10 за счет высокого удельного импульса и кратковременных включений минимизирует расход топлива, способствуя, тем самым, уменьшению массы необходимых запасов ресурсов на борту СИ.
На рисунках 3 и 4 сплошной черной линией обозначены номинальные траектории движения СИ, а серым пунктиром – его действительные траектории с использованием ДУ. Так как ключевым упрощением математической модели номинальных траекторий является представление процессов разгона и торможения в виде мгновенных импульсов, то скорость СИ изменяется до требуемой величины сразу в момент приложения импульса. То есть время, которое требуется для реального выполнения этих процессов, не учитывается.
Результаты вычислительного эксперимента, приведенные в таблицах 3 и 4, демонстрируют систематическое отклонение параметров движения СИ от номинальных значений. Анализируя начальные и конечные координаты инспектора на маршрутах, можно сделать вывод, что он не долетает до заданных точек. Причиной наблюдаемой погрешности является то, что СИ приобретает необходимую начальную скорость только по завершении работы двигателей, что создает временную задержку между началом движения и достижением требуемой скорости. Разгон и торможение происходят в течение некоторых интервалов времени, определяемых характеристиками двигателя и массой спутника. В результате, реальные координаты и скорости спутника получаются отличны- ми от значений, спрогнозированных упрощенной моделью с мгновенными импульсами.
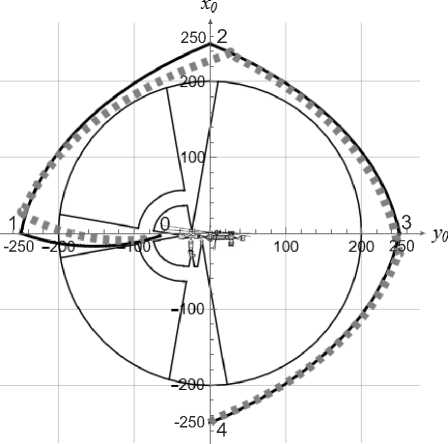
Рисунок 3. Траектории движения СИ с МД08
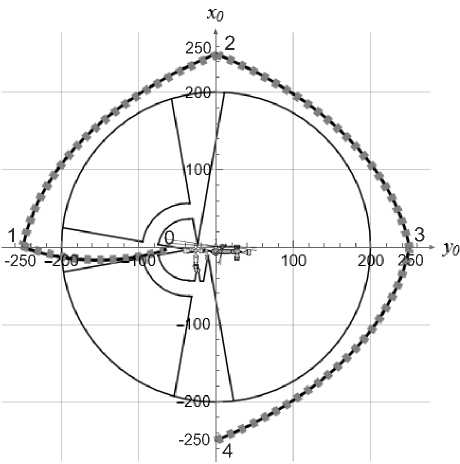
Рисунок 4. Траектории движения СИ с РДМТ10
Остановка СИ между участками движения в промежуточных точках, расположенных на осях ОСК, имеет важное значение, поскольку эти точки имеют известные и точные координаты, которые могут служить ориентирами в задаче облета МКС. Если возникающие отклонения от заданных точек не корректировать, то это может привести к накоплению ошибок при моделировании движения СИ. Поэтому поддержание спутника на запланированной траектории крайне важно для успешного выполнения поставленной задачи. В связи с этим возникает необходимость коррекции траекторий СИ, которая позволит обеспечить максимально возможную точность в достижении точек, расположенных на осях ОСК.
Таблица 3. Отклонения координат и скоростей СИ
|
Двигатель |
Маршрут |
Отклонение x, м |
Отклонение y, м |
Отклонение V , x м/с |
Отклонение V y , м/с |
|
МД08 |
4–3 |
–26,441 |
0,316 |
–1,4 · 10-3 |
1,74 · 10-2 |
|
3–2 |
–10,375 |
26,992 |
3,19 · 10-2 |
5,7 · 10-3 |
|
|
2–1 |
28,256 |
0,805 |
2,7 · 10-3 |
–1,84 · 10-2 |
|
|
1–0 |
–4,0243 |
–21,962 |
–2,75 · 10-2 |
1,3 · 10-3 |
|
|
РДМТ10 |
4–3 |
–1,871 |
0,066 |
5,4 · 10-5 |
1,3 · 10-3 |
|
3–2 |
–0.585 |
1,675 |
2,1 · 10-3 |
3,6 · 10-4 |
|
|
2–1 |
1,879 |
–0,063 |
5,7 · 10-5 |
–1,3 · 10-3 |
|
|
1–0 |
–0,451 |
–1,366 |
–1,7 · 10-3 |
1,6 · 10-4 |
* Vx – скорость СИ в направлении оси х ; V y – скорость СИ в направлении оси х.
Таблица 4. Время работы двигателей
|
Двигатель |
Маршрут |
tk , с |
Δ tнx , с |
Δ tнy ,, с |
Δ tзx , с |
Δ tзy , с |
Δ t , с |
|
МД08 |
4–3 |
600 |
16,858 |
40,966 |
30,654 |
9,034 |
97,513 |
|
3–2 |
600 |
35,574 |
5,522 |
19,061 |
41,547 |
101,704 |
|
|
2–1 |
600 |
15,801 |
42,891 |
31,479 |
12,233 |
102,404 |
|
|
1–0 |
300 |
19,293 |
34,791 |
4,952 |
38,537 |
97,572 |
|
|
∑ |
2100 |
87,526 |
124,169 |
86,146 |
101,351 |
399,193 |
|
|
РДМТ10 |
4–3 |
600 |
1,151 |
2,796 |
2,181 |
0,452 |
6,580 |
|
3–2 |
600 |
2,204 |
0,436 |
1,161 |
2,800 |
6,601 |
|
|
2–1 |
600 |
1,147 |
2,804 |
2,185 |
0,465 |
6,602 |
|
|
1–0 |
300 |
0,916 |
2,442 |
0,761 |
2,492 |
6,611 |
|
|
∑ |
2100 |
5,418 |
8,479 |
6,288 |
6,209 |
26,394 |
* tk – длительность полета СИ; Δ tнx, Δ tнy – время работы ДУ при импульсах наведения по координатам x и y соответственно; Δ tзx, Δ tзy – время работы ДУ при импульсах замедления по координатам x и y соответственно; ∆ t – суммарное время работы ДУ.
Корректирующий алгоритм управляемого движения спутника-инспектора
Суть алгоритма коррекции траекторий для уточнения конечных положений спутника заключается в увеличении количества импульсных маневров на каждом маршруте. Чтобы произвести коррекцию,модернизируемалгоритмуправления, путем добавления после остановки СИ еще одного двухимпульсного маневра, состоящего из импульса наведения и замедления, соответственно. В результате, получим следующую схему движения СИ на каждом отдельном маршруте: разгон – остановка – разгон – остановка. Таким образом, количество импульсных маневров на каждом отдельном маршруте увеличится вдвойне, так как будет задействовано по два импульса наведения и по два импульса замедления. Учитывая, что полная траектория облета включает в себя 4 последовательных маршрута, то общее количество импульсов, которые требуются для движения СИ на всем полете увеличится до 16. Теперь начальными условиями для движения на маршрутах станут уточненные координаты и скорости СИ, полученные в результате проведения коррекций.
Выполнив серию вычислительных экспериментов в соответствии с описанным алгоритмом, получим траектории движения спутника, изображенные на рисунках 5 и 6, где сплошные серые участки представляют собой скорректированные маневры. Численные результаты моделирования приведены в таблицах 5 и 6.
Чтобы сделать вывод об эффективности при-
менения предложенного алгоритма коррекции траекторий, проведем сравнительный анализ результатов скорректированного движения СИ и движения СИ без коррекции. Для проведения количественной оценки будут рассчитаны два клю-
чевых параметра: относительная погрешность конечного положения СИ на каждом маршруте и затраты топлива, необходимые для реализации
импульсных маневров на этих участках.
В данном случае относительная погрешность характеризует степень расхождения между номинальным и действительным положением СИ, которое было получено в результате численного эксперимента. Вычисление относительной погрешности будет производиться по следующей формуле:
указанный недостаток, такой алгоритм управления способствовал существенному повышению точности конечных положений СИ на каждом участке облета. Так, в случае с двигателем МД08 наблюдается увеличение потребления топлива на 108 грамм (+23,7%), при этом отмечается снижение относительной погрешности координат конечной точки облета с 37,439% до 1,938%. В отношении двигателя РДМТ10 наблюдается незначительное повышение затрат топлива, всего на 5,5 граммов (+5,1%), при этом выявлено снижение относительной погрешности с 2,617% до 0,00074%.
£ =
I Х н —
x д + У н
—
| x g + У д |
^ -100%
,
где xн , y н – номинальное значение координат спутника в конечной точке маршрута;
xд , y д – действительное значение координат в конечной точке, полученное путем вычислительного эксперимента.
Одновременно с оценкой точности проведем также оценку экономической стороны используемого алгоритма коррекции траектории. Для этого требуется вычислить затраты топлива, необходимые для выполнения импульсных маневров. Сначала, используя значения технических характеристик двигателя, приведенные в таблице 2, вычислим массовый расход топлива за единицу времени по формуле:
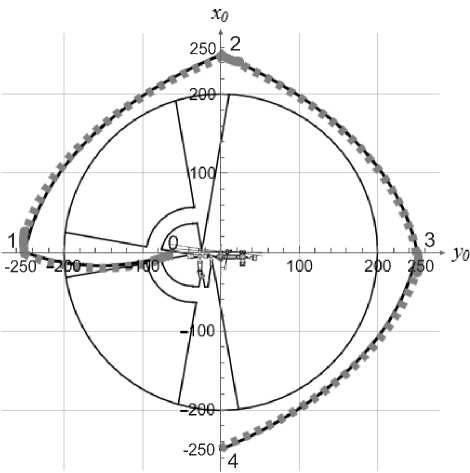
Рисунок 5. Коррекция траекторий СИ с МД08
F m =---,
I yд
где F – номинальная сила тяги двигателя;
I yд – удельный импульс двигателя.
Затем, с помощью полученного значения массового расхода топлива и времени работы двигателя (таблица 6), определяется общее количество топлива, необходимое для выполнения импульсного маневра, в килограммах:
M T = im - A t . (4)
В таблицах 6–9 представлены результаты расчетов оценочных параметров движения СИ без коррекции траекторий и его движения с коррекцией траекторий соответственно.
Проанализировав полученные результаты, можно сделать вывод, что проведение коррекции траекторий привело к увеличению расходов для рассматриваемых ДУ. Тем не менее, несмотря на
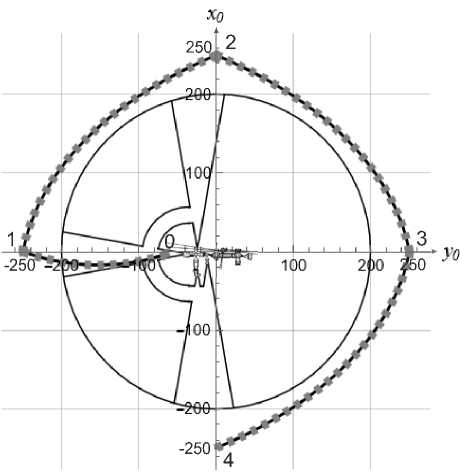
Рисунок 6. Коррекция траекторий с РДМТ10
Таблица 5. Отклонения координат и скоростей СИ
|
Двигатель |
Маршрут |
Отклонение x, м |
Отклонение y, м |
Отклонение Vx , м/с |
Отклонение V y , м/с |
|
МД08 |
4–3 |
–1,311 |
0,311 |
6,3 · 10-5 |
1,3 · 10-3 |
|
3–2 |
–0,068 |
1,119 |
1,4 · 10-3 |
7,4 · 10-4 |
|
|
2–1 |
0,087 |
–0,251 |
–28,5 · 10-2 |
6,1 · 10-2 |
|
|
1–0 |
–1,228 |
–0,117 |
5,8 · 10-3 |
58,3 · 10-2 |
|
|
РДМТ10 |
4–3 |
–4,4 · 10-4 |
1,1 · 10-4 |
2,5 · 10-7 |
2,4 · 10-7 |
|
3–2 |
–1,6 · 10-3 |
–4,8 · 10-3 |
1,4 · 10-6 |
3,5 · 10-5 |
|
|
2–1 |
3,1 · 10-5 |
85 · 10-5 |
–1,9 · 10-2 |
4,9 · 10-3 |
|
|
1–0 |
–4,5 · 10-4 |
–5,3 · 10-5 |
2,3 · 10-6 |
4,3 · 10-2 |
Таблица 6. Время работы двигателей на основных импульсных маневрах
|
Двигатель |
Маршрут |
tk , с |
Δ tнx , с |
Δ tнy ,, с |
Δ t , с з x |
Δ tзy , с |
Δ t , с |
|
МД08 |
4–3 |
600 |
16,859 |
40,966 |
30,654 |
9,034 |
97,512 |
|
3–2 |
600 |
32,234 |
6,457 |
17,326 |
40,211 |
96,228 |
|
|
2–1 |
600 |
16,871 |
41,105 |
30,709 |
9,152 |
97,836 |
|
|
1–0 |
300 |
4,349 |
32,158 |
10,481 |
37,145 |
84,1342 |
|
|
∑ |
2100 |
70,312 |
120,688 |
89,169 |
95,542 |
375,712 |
|
|
РДМТ10 |
4–3 |
600 |
1,151 |
2,795 |
2,181 |
0,452 |
6,579 |
|
3–2 |
600 |
2,187 |
0,439 |
1,152 |
2,792 |
6,572 |
|
|
2–1 |
600 |
1,151 |
2,796 |
2,181 |
0,452 |
6,579 |
|
|
1–0 |
300 |
0,805 |
2,425 |
0,784 |
2,483 |
6,496 |
|
|
∑ |
2100 |
5,293 |
8,457 |
6,298 |
6,178 |
26,227 |
Таблица 7. Время работы двигателей на корректирующих импульсных маневрах
|
Двигатель |
Маршрут |
tk , с |
Δ tнx , с |
Δ tнy ,, с |
Δ tзx , с |
Δ tзy , с |
Δ t , с |
|
МД08 |
4–3 |
180 |
9,321 |
0,675 |
8,648 |
1,816 |
20,461 |
|
3–2 |
180 |
2,519 |
8,029 |
6,384 |
8,929 |
25,861 |
|
|
2–1 |
180 |
9,371 |
0,691 |
8,697 |
1,815 |
20,575 |
|
|
1–0 |
60 |
7,299 |
18,444 |
7,723 |
17,778 |
51,244 |
|
|
∑ |
600 |
28,509 |
27,838 |
31,452 |
30,339 |
118,141 |
|
|
РДМТ10 |
4–3 |
180 |
0,045 |
0,002 |
0,042 |
0,011 |
0,098 |
|
3–2 |
180 |
0,343 |
0,061 |
0,361 |
0,065 |
0,831 |
|
|
2–1 |
180 |
0,045 |
0,002 |
0,042 |
0,010 |
0,098 |
|
|
1–0 |
60 |
0,035 |
0,094 |
0,037 |
0,091 |
0,257 |
|
|
∑ |
600 |
0,468 |
0,159 |
0,481 |
0,175 |
1,284 |
* t кор – длительность корректирующего маневра; Δ tнx кор , Δ tнy кор – время работы ДУ при корректирующих импульсах наведения по координатам x и y соответственно; Δ tз x кор , Δ tзy кор – время работы ДУ при корректирующих импульсах замедления по координатам x и y соответственно; Δ tкор – суммарное время работы ДУ, затраченное на корректирующие маневры.
Таблица 8. Параметры движения СИ без коррекции траекторий
|
Маршрут |
Количество затраченного топлива M T , кг |
Относительная погрешность точки назначения ε , % |
||||
|
МД08 |
МД5 |
РДМТ10 |
МД08 |
МД5 |
РДМТ10 |
|
|
4–3 |
0,11153 |
0,11921 |
0,02728 |
10,703 |
1,886 |
0,774 |
|
3–2 |
0,11632 |
0,12015 |
0,02737 |
14,947 |
2,245 |
0,904 |
|
2–1 |
0,11712 |
0,12019 |
0,02738 |
11,624 |
1,899 |
0,777 |
|
1–0 |
0,11159 |
0,11984 |
0,02741 |
37,439 |
6,404 |
2,617 |
|
4–3–2–1–0 ( Σ ) |
0,45656 |
0,47939 |
0,10944 |
37,439 |
6,404 |
2,617 |
Таблица 9. Параметры движения СИ с коррекцией траекторий
Дата поступления 27.10.2025 Дата принятия 27.11.2025
