Построение искусственных нейронных сетей в е-сетевом базисе

Автор: Цапко Г.П., Тараканов Д.В., Цапко С.Г.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 4 т.3, 2010 года.
Бесплатный доступ
В данной работе предложена методика реализации искусственной нейронной сети, обеспечивающей возможность реконфигурации структуры и параметров сети в процессе ее работы. Результаты работы могут быть использованы в задачах построения многофункциональных компьютерных тренажеров для идентификации объектов управления, что в свою очередь позволит значительно снизить время настройки и калибровки аналитико- имитационной модели компьютерного тренажера, а также отследить и обучить искусственную нейронную сеть действиям оператора.
Искусственная нейронная сеть, имитационное моделирование, фишка, переход, позиция
Короткий адрес: https://sciup.org/146114558
IDR: 146114558 | УДК: 519.876.5
Constructing artificial neural networks in the e-net basis
The given article introduces the method of implementation of the artificial neural network. The method gives the possibility of the network structure and parameters reconfiguration during its work. The results can be used in order to construct multifunctional computer simulator identifying control plants. It will significantly reduce the setting and calibration time of the analytical and simulation model. It will also allow monitoring and teaching the artificial neural network to model the operators actions.
Текст научной статьи Построение искусственных нейронных сетей в е-сетевом базисе
Важным вопросом при проектировании многофункциональных компьютерных тренажеров (МКТ) является построение аналитико-имитационной модели (АИМ) требуемой технической системы [1, 4, 6]. Опыт построения и эксплуатации МКТ, например, в теплоэнергетике показывает, что использование исключительно аналитико-имитационной модели в структуре тренажера затрудняет модернизацию и требует достаточно длительного времени для настройки математической модели. Поскольку в ходе эксплуатации технических систем может происходить модернизация оборудования, необходимо оперативно изменить АИМ. Поэтому для решения данной задачи целесообразно использовать блок системы идентификации технологических процессов и объектов управления (ОУ). Кроме того, в МКТ предлагается использовать модуль идентификации деятельности инструктора и обучаемого. Вышеуказанная компонента тренажера необходима для накопления знаний о деятельности инструктора при отработке различных ситуаций, в том числе и внештатных, а также для получения сведений об основных видах ошибок обучаемого персонала.
Принципы построения многофункционального компьютерного тренажера
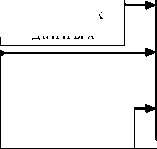
Для повышения эффективности работы МКТ предлагается использовать структурную схему, представленную на рис. 1.
И н
с т р у к
т о
р
Генератор сценариев
Система профилирования динамической модели реального времени
ИНС иден тиф ика ции ОУ ( Е-сетевая структура )
Блок ввода-вывода данных
ОУ
М ассив и с хо д н ы х данных
М одельная оболоч ка Адаптивная динамическая модель теплоэнергетической си стемы (котельной) ! M D = ( M K , M O , M C , M е )
Средства визуализации
О бучаем ы й
Средства архивации
ИНС иден тиф икаци и о пер аций инструктора и обучаемого ( Е -сетевая структура )
Многофункциональный компьютерный тренажер
Рис. 1. Структурная схема многофункционального компьютерного тренажера
Работа тренажера основана на использовании виртуальной модели среды деятельности обслуживающего персонала и специалистов в области теплоэнергетики, управления и т.д. Основой МКТ является совокупность моделей объектов с детальным отражением конструкции и принципа действия технологического оборудования. На основе этих взаимодействующих моделей во времени может быть воссоздана работа как отдельных подсистем, так и всего технологического процесса предприятия. В работе [3] раскрыто назначение и принципы функционирования основных компонент тренажера. В данной работе для обеспечения эффективного функционирования МКТ предлагается ввести следующие компоненты: искусственная нейронная сеть (ИНС) идентификации ОУ, блок ввода-вывода данных для нейронной сети и ИНС идентификации операций (поведения) инструктора и обучаемого. В качестве инструмента идентификации предлагается использовать аппарат искусственных нейронных сетей. Свойства ИНС и обоснование выбора данного математического аппарата в задачах идентификации приведены в [4].
В качестве математического базиса для построения МКТ предлагается использовать аппарат Е-сетей, который является расширением сетей Петри [3]. Е-сети в силу изученных свойств [2, 3, 6] удовлетворяют исходным требованиям в качестве математического базиса построения сложных технических систем с изменяющейся структурно-параметрической конфигурацией, большим количеством элементов, независимо функционирующих друг от друга, наличием случайных процессов, наличием дискретной и непрерывной составляющей и т.д. Нейронные сети и Е-сетевой аппарат обладают общим свойством: позволяют осуществлять параллельные операции. Поэтому в данной работе предлагается использовать Е-сетевой аппарат для моделирования искусственных нейронных сетей.
Моделирование искусственных нейронных сетей в Е-сетевом базисе
Для решения поставленной задачи необходимо сформировать Е-сетевую библиотеку, моделирующую работу нейронов. Одна из широко применяемых моделей нейрона представлена на рис. 2.
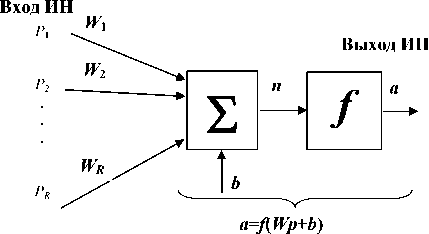
Рис. 2. Модель искусственного нейрона
Нейрон, как известно, является пороговым элементом с переменной возбудимостью, временной и пространственной суммацией возбуждающих и тормозящих воздействий. На рис. 2 представлен искусственный нейрон с одним вектором входа р= [ p 1 , p 2 , ..., pR ], каждый элемент входа умножается на весовые коэффициенты wn, w 12 , ..., w i Rсоответственно, и взвешенные значения передаются на сумматор. Их сумма равна скалярному произведению вектора – строки W на вектор входа р .
Нейрон имеет смещение b, которое суммируется со взвешенной суммой входов. Результирующая сумма n равна n = w 11p 1 + w 12p 2 + ...+ w 1 RpR + b и служит аргументом функции активации f. Кроме того, может использоваться задержка сигналов для рекуррентного определения выходного сигнала. Представленная модель, как известно, отражает лишь некоторые свойства биологических нейронных сетей. Для решения задачи идентификации объекта управления в ряде случаев целесообразно использовать радиальнобазисную сеть [3]. Модель нейронов первого слоя радиально-базисной сети представлена на рис. 3.
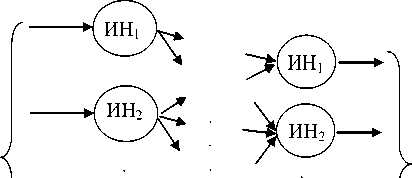
Работа радиально-базисной сети проиллюстрирована на рис. 4.
Для построения моделей искусственного нейрона и нейронных сетей предлагается использовать в качестве базового элемента модели Y-переход Е-сети (рис. 5).
Любой переход Е-сети может быть описан тройкой [1]:
Cj=(S, t(Cj), р(Cj)), где S - тип перехода S={T, X, Y, J, I, F};
t(C j ) - функция задержки - определяет интервал времени, в течение которого должна длиться фаза активности перехода (т.е. вычисляется интервал моделируемого этим переходом исследуемого события);
Вход ИН W 1 W R
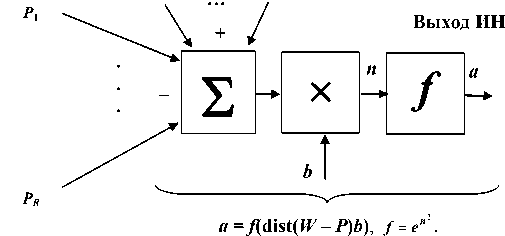
Рис. 3. Модель нейронов первого слоя радиально-базисного слоя
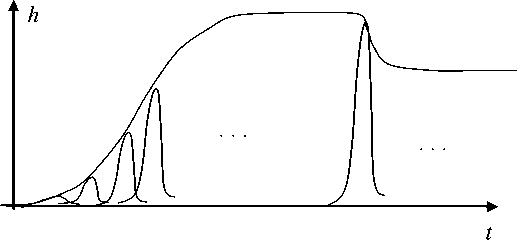
Рис. 4. Иллюстрация работы радиально-базисной сети
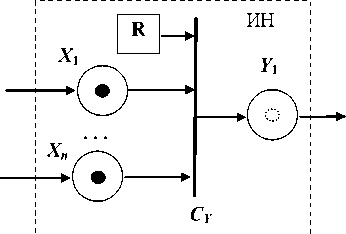
Рис. 5. Е-сетевой граф искусственной нейронной сети
p(C j ) - функция преобразования атрибутов.
Срабатывание перехода Сj вызывает:
-
1) изменение разметки сети: разметка М ( b i ) сменяется на разметку М ( b i+1 ) по следующему правилу:
М ( bi+1 ) =М ( b ) -I(C j ) +O ( C );
где I ( C j )={ b e B : P pre ( b,c )=1} - множество входных позиций перехода C j , O(C j )={b e B s и B q : P post ( b,c )=1} - множество выходных позиций перехода C j ;
-
2) преобразование атрибутов фишки.
Переход Cj изымает фишку из входной позиции и добавляет метку в выходную позицию. Смену разметок обозначают:
M0 Cj M/, где M0 – начальная разметка.
При моделировании систем Е-сетевым аппаратом переходы соответствуют событиям, а позиции - условиям возникновения событий. В частных случаях вводятся фиктивные операции с нулевой длительностью. Каждая позиция b i может иметь метку или быть пустой (разметка позиции М ( b i ) соответственно равняется «1» или «0»). Появление метки в позиции означает, что условие, которое описывает данная позиция, выполнено. Позиции, которые имеют дуги, входящие в переход, называются входными позициями. Те позиции, которые имеют дуги, выходящие из перехода - выходными. Если во входных позициях находятся метки, то такой переход называется взведенным. Если выходные позиции свободны, то после вычисления длительности активного состояния t переход устанавливается в активное состояние. По окончании задержки переход реализует перенос метки из входной в выходную позицию и осуществляется преобразование атрибутов фишки.
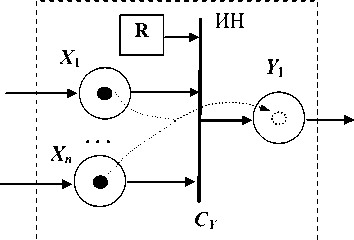
Переходы типа Y имеют позицию условия R . В управляющей процедуре S ( R ) указываются условия, при которых фишка из позиции X перемещается в выходную позицию Y i , если в этот момент позиция Xi свободна, где i – номер выходной позиции, определяемой процедурой
S ( R ).
C y = B ( X i ) л B ( У ) , i=S ( R ), i е {1 , 2 ,_,n }.
Рассмотрим организацию ИНС в Е-сетевом базисе.
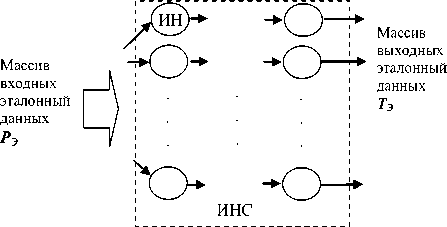
Функционирование искусственных нейронов можно разбить на два этапа (рис. 6): обучения и непосредственно функционирования ИНС. На первом этапе осуществляется с помощью библиотеки алгоритмов обучения [3] настройка структуры, весовых коэффициентов и смещений ИНС таким образом, чтобы функционал J = 2 ( P Э - ТЭ )2 ^ min, где P Э - массив входных экспериментальных данных, T Э – массив выходных эк с периментальных дан н ых. Данные массивы формируются в процессе проведения экспериментов для случая идентификации ОУ и идентификации операций инструктора и обучаемого.
Во втором этапе осуществляется непосредственно работа ИНС.
При обучении нейронных сетей предлагается в качестве атрибутов фишек использовать следующий кортеж параметра нейронной сети:
Atr инс = {A1, A2, A3, A4, A5}.
Первый атрибут задает координату искусственного нейрона в сети. Параметр А2 определяет тип функции активации f, А3 содержит весовые коэффициенты нейрона A3={ w 1 , w 2, ..., w n}. Четвертый атрибут задает значение смещения b . А5 определяет длительность задержки Е-сетевого перехода. При каждом срабатывании Y-перехода, в процессе обучения ИНС, осуществляется запись атрибутов в буфер памяти. В дальнейшем, когда нейронная сеть будет обучена, вычисление выходной активности a = f ( Wp + b ) будет базироваться на параметрах перехода, которые были записаны на последнем такте обучения ИНС. Для обучения нейронной сети используется библиотека типовых алгоритмов обучения, например, алгоритм обратного распространения ошибки и др. [3].
Этап настройки (обучения) ИНС
1-й слой n -й слой
ИНС ИНС

k k kk i,j i, jопт , j jопт
i – номер весового коэффициента j нейрона слоя k
Функционирование искусственного нейрона
Atr y1 = f ( Wp + b ) или f (dist( W – P ) b ).
Рис. 6. Этапы функционирования нейронной сети
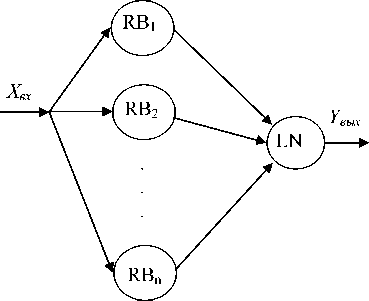
Рис. 7. Структурная схема радиально-базисной сети
x вх
Y вых
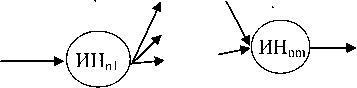
Рис. 8. Структурная схема искусственной нейронной сети прямого распространения
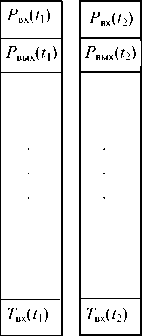
X вх ( t 1 ) X вх ( t 2 ) X вх ( t k )
y вых ( t k )=[Operator_Action k ].
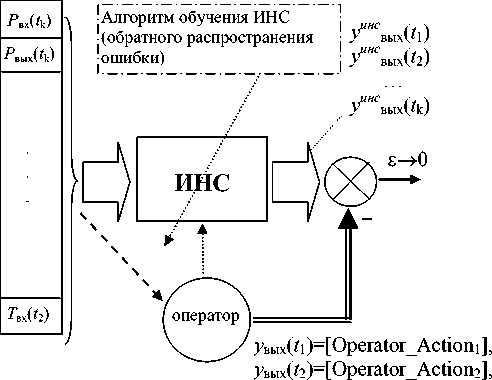
Рис. 9. Схема работы ИНС идентификации действий оператора и обучаемого
Во втором этапе происходит преобразование каждым нейроном сети вектора входных данных (экспериментальные данные или действия оператора). На этапе работы ИНС на вход Y перехода поступают сигналы (фишки), которые содержат как минимум один атрибут Atr инс = {A0}. Параметр сети A0 содержит значение сигнала, которое поступает на вход сети. При срабатывании Y перехода происходит перенос фишки в выходную позицию с вычисленным значением сигнала a = f WWp + b ) или a = f (dist( W - P ) b ).
На основании вышеуказанных принципов построения ИНС в Е-сетевом базисе были построены две нейронные структуры: первая, радиально-базисная схема, решает задачу идентификации объекта регулирования (котлоагрегата КВГМ – 50) (рис. 7), вторая, нейронная сеть, представлена сетью прямого распространения и служит для идентификации деятельности инструктора и оператора (рис. 8).
В процессе обучения второй ИНС на вход сети подаются данные о действиях оператора (розжиг горелки, нормальная работа в регулировочном диапазоне нагрузок, остановы в резерв и т.д.)
C Action = [розжиг, останов,...]T и технологические параметры Par = [p,p,t ,...]T: вх вых вх давление в трубопроводе на входе и выходе котлоагрегата, температуры входной воды и т.д. То есть входным сигналом является вектор
_ J Par [ p ex ,реЫ х , t ex ,...] xex r 17".
[ C _ Action = [ розжиг, останов,... ]
Выходной сигнал - вектор увых = {[ Operator action ],...,[ Operator action ]} , который содержит последовательность действий оператора по отработке заданной ситуации (набор последовательных элементарных операций: открыть ПЗК 1, 2 и т.д.). Вектор входных данных поступает с определенной последовательностью на ИНС, как показано на рис. 9.
Оператор должен своевременно отследить изменившееся состояние системы и сформировать новую последовательность действий. По ошибке рассогласования ε между действиями инструктора и обучаемого можно судить о качестве подготовки оператора.
Заключение
Использование аппарата Е-сетей позволяет моделировать работу искусственных нейронных сетей произвольной конфигурацией, в том числе и динамические нейронные сети. Отличительной особенностью предлагаемой методики реализации ИНС является то, что можно осуществлять реконфигурацию структуры и параметров сети в процессе ее работы. Кроме того, представленная методика построения ИНС позволяет в одном Е-сетевом базисе осуществлять сопряжение АИМ и нейронных сетей.
Применение многофункционального компьютерного тренажера компоненты ИНС для идентификации ОУ позволяет снизить время настройки и калибровки АИМ компьютерного тренажера, отследить и обучить ИНС действиям оператора.
