Построение кривой скорости в режиме тяги с использованием пакета расширения Simulink матричной лаборатории Matlab

Автор: Руцкий В.М., Петрова В.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и промышленность
Статья в выпуске: 5-2 т.11, 2009 года.
Бесплатный доступ
Статья посвящена разработке математической модели, построения кривой скорости в режиме тяги. Представлен расчет скорости развиваемой высокоскоростным подвижным составом.
Математическая модель, скорость, тяга
Короткий адрес: https://sciup.org/148198738
IDR: 148198738 | УДК: 621.331:621.311
Construction of curve speed in the regime of thrust with use of the expansion package Simulink of matrix laboratory Matlab
Article is devoted to development of mathematical model, construction of curve speed in a regime of thrust. Calcula-tion of speed developed by a high-speed rolling stock is presented.
Текст научной статьи Построение кривой скорости в режиме тяги с использованием пакета расширения Simulink матричной лаборатории Matlab
Режим движения поезда определяется соотношением всех действующих на поезд сил. Анализ уравнения движения поезда (1) показывает, что в нормальных условиях эксплуатации возможны три режима движения поезда: тяга, выбег и торможение.
(1 + у ) ■ m ■ — = F ( V ) - W(V ) - B(V )
dt (1)
где γ – коэффициент, учитывающий инерцию вращающихся частей; F ( V ) – характеристика силы тяги, определяется мощностью ЭПС; W ( V ) – силы сопротивления движению; B ( V ) – тормозная характеристика.
Рассмотрим режим тяги. Период тяги разделяется на периоды пуска подвижного состава и движения по автоматической характеристике. При пуске тяговые двигатели развивают наибольшую силу тяги. Сила тяги реализуется движущимися колесными парами. Поскольку в режиме тяги торможение не применяют, то dV _ F(V)- W(V) - B(V) dt m (1 + у)
где B ( V ) = 0, m(1+γ) – величина постоянная, примем равную 1.
dV _ F ( V ) - W(V )
dt (3)
При тяге, когда F ( V )> W ( V ) и, следовательно dV / dt> 0, подвижной состав движется ускорено. Если в режиме тяги F ( V )= W ( V ), то dV / dt= 0, и подвижной состав движется с установившейся скоростью. При F ( V )< W ( V ) подвижной
движется замедленно.
При движении подвижного состава возникают силы сопротивления движению. Результирующая сил сопротивления движению действует против направления движению подвижного состава.
W ( V ) = W k ( V ) + W в ( V ) + W кр + W ук (4)
где W к ( V ) – сила сопротивления качению; W в ( V ) – сила сопротивления воздуха; W кр – удельное сопротивление от кривой; W ук – удельное сопротивление от уклона.
W k ( V ) = f G c (5)
где f – коэффициент трения качения; G с – вес состава.
На рис. 1 представлена зависимость коэффициента трения качения от скорости.
Аппроксимируем соотношение коэффициента трения качения f от скорости V и получим уравнение:
f ( V )=-2,058 10-9 V 4 + 3,573 10-8 V 3 –
– 1,102 10-5 V 2 + 1,118 10-4 V + 1,293 10-2
Тогда w.(V) _ C, ■ P ■ F ■ — в x в 2 (7)
где V –скорость подвижного состава, C x – коэффициент аэродинамического сопротивления определяется по формуле:
С x = 0,46 +0,00225 l (8)
где l – длина состава, равная 60 м; P в – плотность воздуха, равная 1,293 кг/м, F – модель вагона, равная 3 м x∙2,65 м = 7,95 м2.
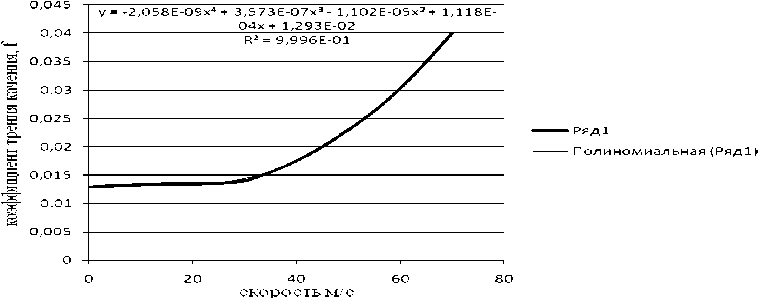
Рис. 1. Зависимость коэффициента трения качения f от скорости V
W кр = 0,45/ R кр (9)
где R кр – радиус кривой.
W = —— ук 1000 (10)
где i - уклон в %.
На рис. 2 представлена динамическая модель построения кривой скорости в режиме тяги для высокоскоростной транспортной системы «Самара-Аэропорт-Толь-ятти». План и профиль трассы взяты из отчета ОАО «Сама-раэкотранс».
Используем метод конечных разностей – широко известный и простейший метод интерполяции. Его суть заключается в замене дифференциальных коэффициентов уравнения на разностные коэффициенты, что позволяет свести решение дифференциального уравнения к решению его разностного аналога, т.е. построить его конечно-разностную схему.
ay у -у
— = V + 1 V = F (V ) - dt A t
- (W k ( V ) + W b (V ) + W p + W yk )
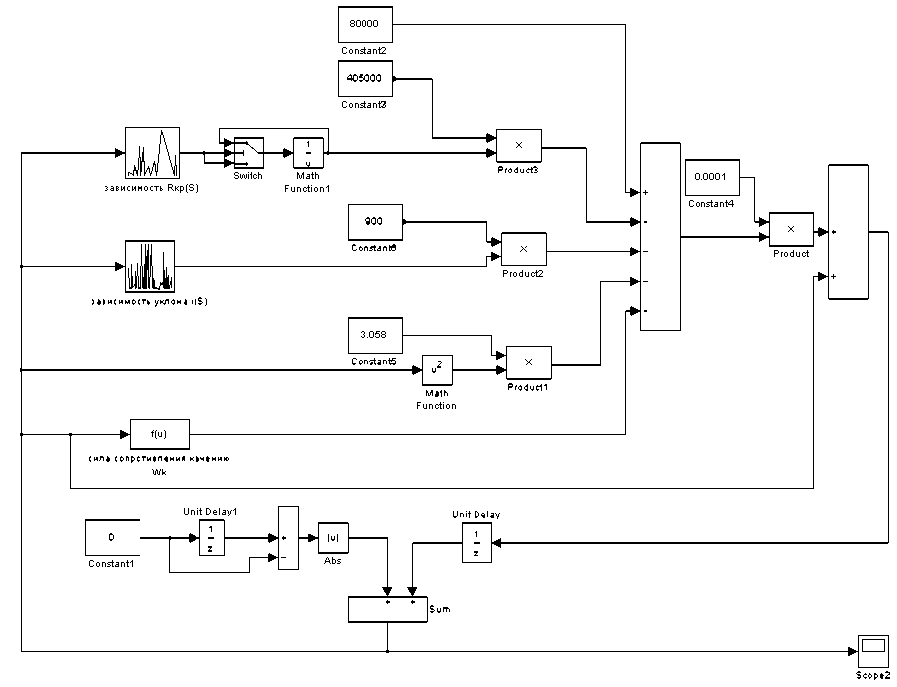
Рис. 2. Динамическая модель построения кривой скорости в режиме тяги
Интегрирование уравнения движения транспортного средства позволяет найти зависимость между скоростью движения, временем и пройденным расстоянием. Разобьем путь на малые участки ΔS и будем считать, что в пределах этих участков равнодействующая сила не зависит от скорости. Интегрируем уравнение движения транспортного средства и получаем выражение для скорости в начале i -го участка:
V t+1 =( F ( V )–( W k ( V )+ W в ( V )+ W кр + W ук ))Δ t + V t
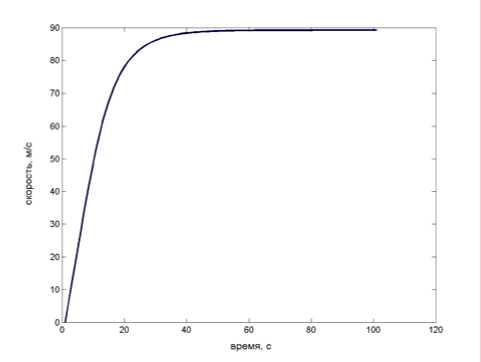
Рис. 3. Кривая скорости высокоскоростного подвижного состава
Результатом разработки модели является получение кривой скорости, развиваемой вы- сокоскоростным подвижным составом. На рис. 3 представлена кривая зависимости скорости от времени. Нахождение скорости и построение кривой является составной частью тягового расчета, необходимого для совершенствования проектирования системы электроснабжения высокоскоростной транспортной системы «Самара – Аэропорт – Тольятти». Система должна обладать высокой надежностью. Обеспечение высокой надежности требует относительно большой точности расчета параметров системы, особенно тех которые определяют ее прочность.
Список литературы Построение кривой скорости в режиме тяги с использованием пакета расширения Simulink матричной лаборатории Matlab
- Шевченко, В.В. Электроснабжение наземного городского электрического транспорта: Учебное пособие для студентов вузов/В.В. Шевченко, Н.В. Арзамасцев, С.С. Бодрухина -М.: Транспорт, 1987. -272 с.
- Слепцов, М.А. Основы электрического транспорта: учебник для студентов высш. учеб. заведений/М. А. Слепцов, Г. П. Долаберидзе, А. В. Прокопович и др.]; под общ. ред. М. А. Слепцова. -М.: Издательский центр «Академия», 2006. -464 с.
- Дьяконов, В.В. Специальный справочник. -Спб: Питер, 2002. -528 с.
- Теория электрической тяги; под ред. И.П. Исаева. -М.: Транспорт, 1995. -294 с.
- Игнатьев, М.Б. Моделирование системы машин/М.Б. Игнатьев, В.З. Ильевский, Л.П. Клауз. -Л.: Машиностроение. Ленинград. отд-ние, 1986. -304 с.
