Построение минимизирующих последовательностей в системах с неограниченными управлениями

Автор: Моржин О.В.
Журнал: Вестник Бурятского государственного университета. Философия @vestnik-bsu
Рубрика: Методы и задачи оптимального управления
Статья в выпуске: 9, 2009 года.
Бесплатный доступ
Статья посвящена изучению возможности построения минимизирующих последовательностей в задачах оптимального управления для систем с неограниченными линейными управлениями без выполнения условия корректности: коммутативности их базисных полей. Рассматриваются иллюстративные примеры.
Оптимальное управление, вырожденные задачи, минимизирующие последовательности
Короткий адрес: https://sciup.org/148179091
IDR: 148179091 | УДК: 517.977
The minimizing sequences construction in the systems with unrestricted controls
The article is devoted to the minimizing sequences construction in optimal control problems for systems with unrestricted linear controls, where the commutativity of basis fields condition isn't satisfied. Demonstrative examples are given.
Текст научной статьи Построение минимизирующих последовательностей в системах с неограниченными управлениями
Многие прикладные задачи оптимального управления являются вырожденными [1 – 10], так что известные общие методы оптимального управления и классические вариационные методы для них оказываются неэффективными, либо вообще неприменимыми.
Типичный класс вырожденных задач представляют задачи c линейными неограниченными управлениями:
I (u() x(•)) = F(x(tF )) ^ inf, T = [t,, tF ],(0.1)
x(t) = g(x(t), t) + (h(x(t), t), u(t)V x(tI) = xI, x(t) e R", u(t) e R,(0.2)
x(t) е X(t).(0.3)
В отличие от классических задач, где предполагается существование оптимального решения, доставляющего минимум функционала, здесь под решением задачи понимают мини мизирующую последовательность { u s ( • ), x s ( • ) } , на которой I ( u s ( • ), x s ( • ) ) ^ inf I ( u ( • ), x ( • ) )
при s ^^. Управление us (•) будем считать кусочно-непрерывным, траекторию xs (•) - непрерывной кусочно-дифференцируемой функцией. Такие последовательности представляются посредством обобщенных решений типа импульсных режимов управления.
Во многих работах по оптимальному импульсному управлению при исследовании задач вида (0.1) – (0.3) постулировалось выполнение условия коммутативности (корректности):
— д h д hp h --- h дx 4
– коммутатор (скобка Ли) гладких
[hp,hq] = 0, p,q = 1,k , где [hp,hq] = ^qhp дx функций hp,hq , и (hl)x – матрица Якоби.
В статьях [11 – 13] показано, что условие Фробениуса не является необходимым условием для метода преобразований и позволяет преобразовать исходную систему к производной системе, менее сложной, чем его выполнение в системах того же порядка.
В работе [13] предложен подход к построению траекторий импульсных режимов управляемых систем, основанный на представлении предельной системы как управляемой с неограниченными линейными управлениями и ее последовательном преобразовании к эквивалентным системам понижающегося порядка, называемых производными системами.
Цель исследования состоит в том, чтобы, опираясь на известный метод преобразования к производной задаче [4, 6, 7] и предложенную в [13] схему построения траекторий предельной системы на ее орбите, разработать процедуру построения минимизирующей последовательности в общем случае, без упомянутого предположения о корректности и с учетом возникающих при этом особенностей .
1. Преобразование к производной системе , орбита предельной системы
В работах В.И. Гурмана [4, 6, 7] предложен метод преобразования вырожденных задач к производным задачам с переходом к производной системе меньшего, чем n , порядка так, что траектория x E ( • ) ( E означает «extension» - расширение), фигурирующая в производной системе в роли управления, аппроксимируется по мере последовательностью { x s ( • ) } допустимых траекторий исходной системы.
Производная система, безотносительно какой-либо оптимизационной задаче, имеет вид: y ( t ) = ( % , g ( x ( t ), t )) + П , y = n ( t , x ), (1. 2)
где y = n(t, x) — m -мерное интегральное многообразие (m < n) предельной системы, которая строится следующим образом. Система (0.2) представляется в виде x^) = g(x^)IIt) + Еhj(x(т),t)u^, t(T) = ТТ^, t(0) = 0, те[0,TF], (L3)
и(т)|| н j ||u(т)|| ||u(т)|| где т - вспомогательный аргумент. При достаточно больших управляющих воздействиях в системе (1.3) ее динамика главным образом определяется слагаемыми в правой части уравнений, зависящими от управления. В пределе при ||и|| ^ ^ она переходит в систему, называемую предельной:
k
5 & ( т ) = £ h p ( x( т ), t ) lp , || l || = 1 , т е [0, T f ] , t = const . (1.4)
p = 1
Правая часть системы (1.4) задает линейную оболочку размерности к . Функция n i (t , x ) будет называться первым интегралом системы (1.4), если на любой траектории x( т ) этой системы она постоянна, т.е. n i ( t , x ( т )) = const , где i < к . Совокупность независимых первых интегралов системы (1.4) - интегральный базис: y = n ( t , x ) •
Были сформулированы достаточные условия, обеспечивающие указанное преобразование, основное – полная управляемость системы (1.4) на интегральном многообразии y = n ( t , x ) [4, 6, 7].
Понятие орбиты [14] напомним в терминах алгебры Ли семейства векторов h 1 , …. hk . Пусть Lie ( h 1, ..., hk ) – алгебра Ли, генерируемая добавлением к семейству h 1 , …. hk всех скобок Ли [ h i , h j ] , [[ h i , h j ], h l ] , .„ ( i , j , l = 1, к ) и их линейных комбинаций. Пусть L ( x ) -линейная оболочка алгебры Lie ( h 1 , ..., hk ) в точке x е E" . Если dim L ( x ) = m < n , то предельная система вполне управляема на некотором связном m -мерном многообразии O с R" - орбите семейства h 1 , .^. hk :
O y = { ( x ): y = П ( t , x ) } , (1 .5)
где t является параметром. Размерность орбиты равна размерности линейной оболочки ал40
гебры Ли. Конечно, явно выписать уравнение орбиты системы (1.5) в общем случае невозможно, тогда необходимо неявное описание [7].
В производной системе функции y ( t ) – играют роль кусочно-гладких фазовых траекторий, а функции x ( t ) – роль кусочно-непрерывных управлений, связанных с фазовыми координатами конечными соотношениями (1.5) так, что разрывы происходят вдоль траекторий предельной системы, соединяющих левый и правый пределы в точке разрыва. Таким образом, в некоторый момент t возникает задача построения траектории предельной системы (1.4), соединяющей некоторые точки
x (0) = x 0 , x ( T f ) = x T , (1.6)
F удовлетворяющей уравнению орбиты (1.5). Вектор y определяется начальным условием.
В общем случае решение такой задачи для управляемой системы неединственно, и эту неединственность можно использовать для построения наиболее простых траекторий, что важно для их последующей аппроксимации допустимыми решениями исходной системы при построении минимизирующей последовательности.
Пример 1. Рассматривается система
1 1 1 2 212
x = g (x) + u , x = g (x) + xu , x3 = g3(x) + (x1)2u2/2, x4 = g4(x)-2xxu 1, te T = [0, 1], xl 4(0) = 0'
и задача оптимального управления с целевым критерием
I (u (•), x (■) ) = ( x 1(1)) + x 4(1) ^ inf,(1.8)
при дополнительном поточечном фазовом ограничении - 1 < x 1 ( t ) < 1 , t е T .
Системе (1.7) соответствует предельная система:
x'(t) = 11, x2(t) = x1(т)12, x3(t) = (x*)212/2, x4(т) = -2xх(т)11, те [0,TF],(1.9)
в которой не выполнено условие коммутативности:
h1( x) = (1,0,0, -2 x1)T, h2 = (0, x ',( x T/2,0)T, h3 = [ h1, h 2] = ^ h,-^ h 2 = (0,1, x 1,0)T ^ 0. dxd
По первому и четвертому уравнениям системы (1.9) находится их первый интеграл:
dx 4 = - 2 x 1 dx 1 , n ( x ) = ( x 1 ) 2 + x 4 = const .
который, как легко убедиться, задает орбиту системы:
n x 1 h .+ П 2 h 2 + n x з h 3 = 0 , O y = { ( x ): y = ( x 1 )2 + x 4 } .
Перейдем в системе (1.7) к новым переменным x 1 - 3 и y = ( x 1 )2 + x 4 :
5&х( т ) = 1 3, x 2( т ) = x11 2, x\ f ) = ( x 3) 2 1 2/2 , у( т ) = 0 , т е [0, т ] . (1.10)
F
Имеем у0 = (x0)2 + x4. Предельная система не вполне управляемая в R4, но вполне управляемая на связном 3-мерном многообразии Oy , проходящем через начальную точку x 4 (0) = x0-4. Положим g(x) = (1,0,0,0)T . Производная система (1.2) имеет вид:
у ( t ) = 2 x 1 ( t ) , у (0) = 0 . (1.11)
Система (1.11) - первого порядка, в ней шесть переменных: у , x w, u 12. Все переменные, кроме y , являются управляющими и могут быть заданы произвольно как кусочнонепрерывные функции x1 - , йхЕ2 , определяющие некоторый импульсный режим. Критерий оптимальности (1.8) с учетом уравнения орбиты Oy представляется в виде
I = у (1) ^ inf . (1.12)
Имеем регулярную задачу оптимального управления, решение которой XVE (t) = -1. Тогда у(t, XVE ) = -21, XЕ(t) = -21 -1, t e T. Функции 5cE 4(t) не удовлетворяют начальным ус- ловиям. Этим функциям при t е (0,1] отвечает управление uE (t) = -1, но для иллюстрации возможности решения задачи при произвольном выборе функций xiE3, й^"1 полагаем u',' = 0 на всем отрезке T. Таким образом, имеем x1E (t) = -1, xE 3( t) = 0, x4( t) = -2t -1, y (t, xE ) = -2t, йЕ-2 = 0 на T, min У (1) = -2. Нужно построить последовательность {xs (■)} для приближения траектории xЕ (■) по мере на отрезке T. □
2. Управляемость предельной системы на орбите
Краевые условия означают требование перевода системы (1.4) из заданного начального состояния x в фиксированное конечное состояние x . Рассмотрим, как перейти из на-0F чального состояния в конечное по траектории системы (1.4), лежащей на орбите.
Для исследования системы (1.4) перейдем к вспомогательной системе k д^т) = ^hp(x(т),t)up(т), те [0,тF], t = const. (2.1)
p = i
В соответствии со схемой, предложенной в [13], система (2.1), линейная по неограниченным управлениям, представляется в виде mr
5с( т ) = h ( x , t ) u + h ( x , t ) й = ^ h i ( x , t ) u i + ^ h j ( x , t ) uj , те [0, т F ] , t = const , i = r + 1 j = 1
где при управлениях u i = 0 получаем корректную систему (это заведомо верно, если число управлений u j равно 1). Находится ( n - r )-мерный интеграл у = n ( x , t ) корректной системы и рассматривается система, производная по отношению к (2.1):
у ( т ) = n xh ( x , t ) u , y = т / ( x , t ) , n xh(x , t ) = 0 , t = const .
Переменные производной системы можно назвать «активными», а остальные – «пассивными». Множество «активных» переменных обозначим как NonPas , «пассивных» – Pas .
Тем самым вводится множество Ex кусочно-непрерывных функций x ( т ) , таких что функции у( т ) = т / ( x ( т )) кусочно-гладкие и удовлетворяют производной системе.
Для системы вида (2.1) существует преобразование ( x ) ( у , z ) , где z = f ( x ) - вектор криволинейных координат на интегральном многообразии. Обратное преобразование x = £ ( у , z ) . Исходная система (2.1) преобразуется к системе
у ( т ) = n xh ( x , t ) u , у = т / ( x , t ) , nJPx , t ) = 0 , t = const , Z ( т ) = ^ x ( hz ( x , t ) u + hi(x , t ) й ) , x = ^ ( у , z ) .
По аналогии с системой (1.7) может оказаться, что уравнения системы изначально разделены на «активные» и «пассивные». Изучим этот случай подробно. Для получения производной системы достаточно записать систему без «пассивных» уравнений. Получим расширенную предельную систему:
•x j ( т ) = ^ hJp ( x ( т ), t ) vp ( т ), т е [0, т F ] , t = const , j е NonPas . (2.2)
p
«Управляющие» функции x i ( т ) ( i е Pas ) могут быть разрывными, в том числе на концах отрезка [0, т F ] . Функции xj ( т ) ( j е NonPas ) будем строить непрерывными и удовлетворяющими соответствующим краевым условиям из (1.6). Управления u 1 ( т ) , —, uk ( т ) и x i ( т ) ( i е Pas ) в системе (2.2) надо задать таким образом, чтобы вычислялись решения x j ( т ) ( j е NonPas ), удовлетворяющие орбите. Рассмотрим функции u 1 ( т ) , —, uk ( т ) постоянными на всем отрезке [0, т F ] , а функции x i ( т ) ( i е Pas ) - постоянными на интервале ( т1 , т F ) и принимающими на концах отрезка значения, равные граничным состояниям:
(2.3)
Заметим, что в расширенную систему (2.2) могут быть подставлены вместо определен ных по формуле (2.3) функций x (т) константы xi на [0, TF ], так как в интегральном смысле все равно траектории xj (т) не изменятся. Представление функций x1 (т) в виде (2.3) нужно для выполнения соответствующих номерам i краевых условий из (1.6).
Теперь правая часть системы (2.2) зависит не от неизвестных функций, а от параметров. Система стала проще. Например, если правая часть системы не зависит от xj , то решение находится непосредственным интегрированием:
Т x j Т) = xj + J £ hrvrdт := xTF .
F k
(2.4)
T I r = 1
В результате решения системы алгебраических уравнений вычисляются управляющие параметры u 1, ..., u k и x i ( i e Pas ) и, значит, может быть построена траектория x( T ) предельной системы (2.1), удовлетворяющая в каждый момент т орбите, в том числе краевым условиям (1.6). Траектория X ( т ) получается непрерывной по «активным» координатам и разрывной по остальным.
Необходимое условие для выполнения такой процедуры – равенство числа искомых параметров в правой части (2.4) числу уравнений, т.е. числу «пассивных» координат. Если оно не выполняется, то можно идти двумя путями. Первый путь – увеличивать число параметров за счет применения кусочно-постоянных управлений или другого параметрического семейства управлений. Второй путь – уменьшать далее порядок системы путем итеративных переходов к новой производной (относительно предшествующей) системе, что всегда возможно при наличии линейных управлений, которые вместе с новым управлением x e Oy (t, y) задают некоторый пучок гиперплоскостей (в простейшем случае - прямых) [13]. Построив его линейную оболочку, получим систему канонического вида, аналогичную исходной (0.2). При этом базис можно задавать неоднозначно, отправляясь, например, от некоторого поля h1(^(y, Z)), где Z - постоянный вектор криволинейных координат на орбите. При следующем переходе будем иметь семейство производных систем с параметром z , который будет играть роль постоянного по времени управления.
Пример 2. Пусть x1-4 = 1, x1F =-1, x2F = 2, x3F =-1/2, x4F = 1 для предельной систе мы (1.9). Здесь NonPas = {2,3}, Pas = {1,4} , y = 2 . Так как x/ ^ xJF, j = 2,3, полагаем:
|
1 x 0 , |
T = T o ; |
4 x 0 , |
= 0; |
|
|
•x'T ) = ■ |
x 1 = const, |
т e (0, T f ); :v 4( T ) = ■ |
x 4 = y - ( x *)2, |
т e (0, T f ); |
|
^ x 1 F , |
T = TF ; |
^ x 4 f , |
T = T F . |
(2.5)
Определив x^) по формуле (2.3), получаем u^T) = 0 , т e [0, TF ]. По второму и третьему уравнениям системы (1.10) и с учетом краевых условий имеем: ff Ff x\тР) = x0 + J x1 u2 de := x2F , x3(TF) = x0 + J 00
-( x *)2 u2d e : = x 3 F ,
x1 й2 = a , ( x *)2 й2/2 = b , a = ( x 2 F -x 2 ) T , b = ( x 3 F - x 0 ) F F .
Разрешаем систему алгебраических уравнений относительно x 1 и u ˆ2 :
X 1 = 2 b/a , й1 = a 2 /2 b . (2.6)
Таким образом, для расширенной предельной системы (вида (2.2))
X2( т ) = x '( г ) и 2, X3( T ) = ( x *) 2 и 2/ 2
функции x '( г ) = X' T ) и й 2( т ) = й2( г ) найдены. Тогда точка ( X 1 , X 4) лежит на параболе x 4 = у - ( x *)2 при данном у . Из точки ( x 0 , x 4 ) попадаем в точку ( X 1 , X 4) скачком, затем также скачком переходим в точку ( x T , x T ) , что иллюстрирует рис. 1 при T F = 1 .
FF
Получены непрерывные линейные функции
-
2 2 12 з з 1 2 2
X ( T ) xT + x й ( Т v i ) , X ( T ) xT + (x ) й ( т т i ) I , удовлетворяющие краевым условиям.
При T F = 1 имеем a = 1 , b = - 3/2 , X 1 = - 3 , г)2 = -1/3 , X 4 = - 7 . На рис. 1 показаны графики проекций траектории X( T ) . Пунктирные линии означают разрывы траектории. □
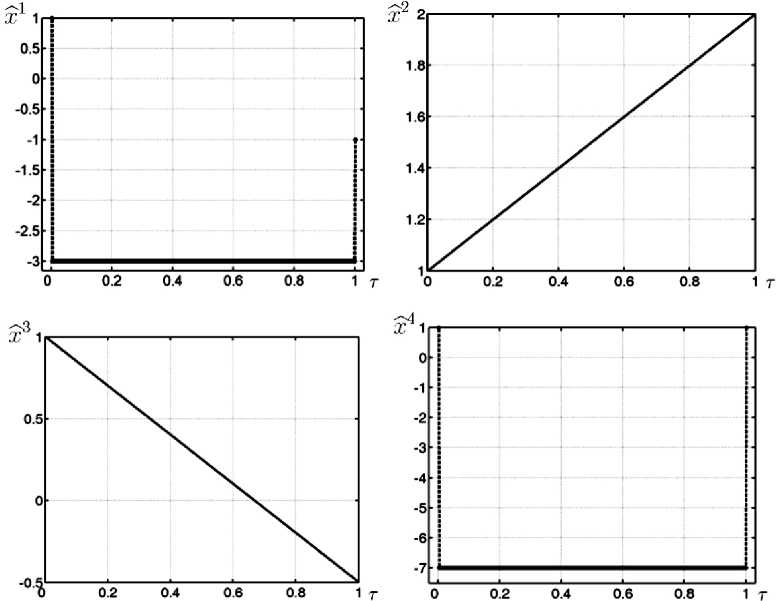
Рис . 1
k
Если оказывается x 0 0 = xJ T ( j е NonPas ), то, например в (2.4) получаем ^ ^й r = 0 . Это r = 1
«особый» случай, и формулы для X(T), которые получены ранее в предположении, что xj * xJT (j е NonPas), нельзя применить. Нужно задать каждую константу xi, равной од-F ному из значений x0 или x^F .
-
3. Аппроксимация траектории предельной системы непрерывными траекториями исходной
Рассматривается система, эквивалентная системе (1.3) при L = || u || и управлениях
V = uj/||u ||, таких, что V е { 0, ± 1 } , || 1 || = 1 , j = 1, к :
r
X & ( T ) = g ( x ( т ), t )/ L + ^ h j ( x( т ), t ) l , t ( T ) = 1 L , t T I ) = t T I, Te [ T i , T f ] , (3.1)
= 1
где L – достаточно большое число.
т
Решая задачу Коши t( т ) = 1[L , т е [0, т F ], t (0) = 0, находим t ( т ) = j (1/ L ) d e = т/ L , 0
t( т ) = т/L , t т ) = т F /L , где момент т F априори не известен.
При L ^ ^ имеем g ( x , t )/ L ^ 0 на [0, т F ] , но в этом случае значение t( т F ) ^ 0 .
Схема аппроксимации траектории 5с(т) предельной системы следующая. Задается произвольно достаточно большое значение тF и вводится равномерная сетка на отрезке [0, тF]. Далее система (3.1) интегрируется численно на [0, тF] с управлениями /^{0, ± 1}, и = 1, j = 1, к, и константой L , которые задаются таким образом, чтобы траектория x(f) системы (3.1), исходящая из начального состояния x0, была непрерывной по всем аргументам и в момент тF выполнялось условие xc(тF) = 5c(тF) в смысле критерия error = |jx^) -xF 11 < £. (3.2)
На отрезке [0, т F ] рассматриваются точки т ^ , т 2 , в которых происходит смена значений управлений / 1 , ..., /к . Эти точки вместе с моментом т F определяются при достижении «пассивными» и «непассивными» решениями тех или иных значений. Например, если x 0 > x i ( i е NonPas), то управления будут заданы такими, чтобы на отрезке [0, т 1 * ] функция x i ( т ) убывала до значения x i .
Пример 3. Продолжим исследование, начатое в примерах 1, 2, заменив при этом вектор g ( x ) = (1,0,0,0) T на вектор g ( x ) = (sin x 1 , 1, cos x 2, - 1) T .
Начальное приближение т F = 7 . Интегрируем систему (1.7) с управлениями / 1 =- 1 , / 2 = 0 до тех пор, пока функция X 1( т ) не достигнет значения x1 с некоторой точностью £ 1 по критерию x 1 ( т 1 ) - x 11 < £ 1 1 .
Затем на полуотрезке ( т ' , т 2] интегрируем систему (1.7) с управлениями / 1 = 0 , / 2 = - 1 , пока функции x 2 , 3( т ) не достигнут постоянных значений x^- F 3 с точностью £ 1 соответственно, тем самым определяя точку т 2 . Далее, на полусегменте ( т : 2 , т F ] интегрирование системы проводится при / 1 = 1 , / 2 = 0 , пока аппроксимирующая траектория X ( т ) не достигнет заданного конечного состояния с точностью £ по критерию (3.2). На рис. 2 представлены соответствующие графики. □
-
4. Построение последовательности кусочно - непрерывных функций xq ( t ) для исходной системы
На отрезке [0, tF ] вводится сетка
0 = t 0 < t 1 = t 0 + А t < ... < tj = j A t < ... < q A t = tF , A t = tF[q , (4.1)
где q – достаточно большое число.
Функции xq ( t ) выступают в роли «промежуточного звена» при аппроксимации разрывной траектории x ˆ E ( t ) с помощью непрерывных траекторий x s ( t ) исходной системы, где s – номер члена последовательности, аппроксимирующей x ˆ E ( t ) по мере.
Укажем свойства функции xq (t) при фиксированном q. На интервалах (tj, tj+1) (j = 0, q) функция xq (t) непрерывная и кусочно-дифференцируемая, является решением исходной системы (0.2) при начальном состоянии xq (tj + 0) е Q(tj, yq (tj)), которое задается из значения xq (tj) = xq (tj - 0) е Q(tj, yq (tj)), где Q(tj, yq (tj)) - орбита предельной системы, порожденная начальным состоянием xq (tj - 0). Функция xq (t) подразумевается непрерывной слева на [t0, t). Запись xq (t0) = xq (t0 - 0) означает xq (t0) = x(t0) = x0. В момент tq = tF предел слева xq (tq - 0) порождает yq (tq), а значение xq (tq), формально равное xq (tq + 0), находится, исходя из орбиты Q(tq, yq (tq)). Точки xq (tj + 0) берутся на орбитах Q(tj, yq(tj)) такими, чтобы величина ||xq (tj + 0) - xE (tj + 0)|| была наименьшей.
Пример 4. Для задачи, поставленной в примере 1, при g ( x ) = (1,0,0,0) T продемонстрируем процесс построения функции xq ( t ) , положив сначала q = 5 .
В момент 1 0 = 0 функция xq ( t ) принимает заданное значение xq (0) = 0 . Орбита Q ( 1 0 , y q ( 1 0 )) = { ( x ): yq ( 1 0 ) = ( x q ( 1 0 ))2 + x 4 ( 1 0 ) = 0 } . Значение xq ( 1 0 + 0) принадлежит аппроксимируемой траектории x E в момент ( 1 0 + 0) . На промежутке ( 1 0, t 1 ] = (0,0.2] , поставляя управления U E 2( t ) = 0 в исходную систему, находим x q ( t ) = t - 1 , x q 3( t ) = 0 , x ^ (t ) = - 1 . Имеем x q ( t 1 - 0) = - 0.8 , xq 4( t 1 - 0) = - 1 , yq ( t 1 ) = - 0.36 * ( xx E ( t 1 ))2 + x E ( t 1 ) = - 0.4 , yq ( t i ) - ( x E ( t i ))2 =- 1.36 > y ( t 1 ) = - 1.4 . В качестве начального состояния для интегрирования исходной системы на следующем частичном промежутке - начиная с ( t 1 + 0) - берем точку ( xq3,y q ( t 1 ) - ( x E ( t 1 + 0))2 ) = ( - 1,0,0, - 1.36 ) .
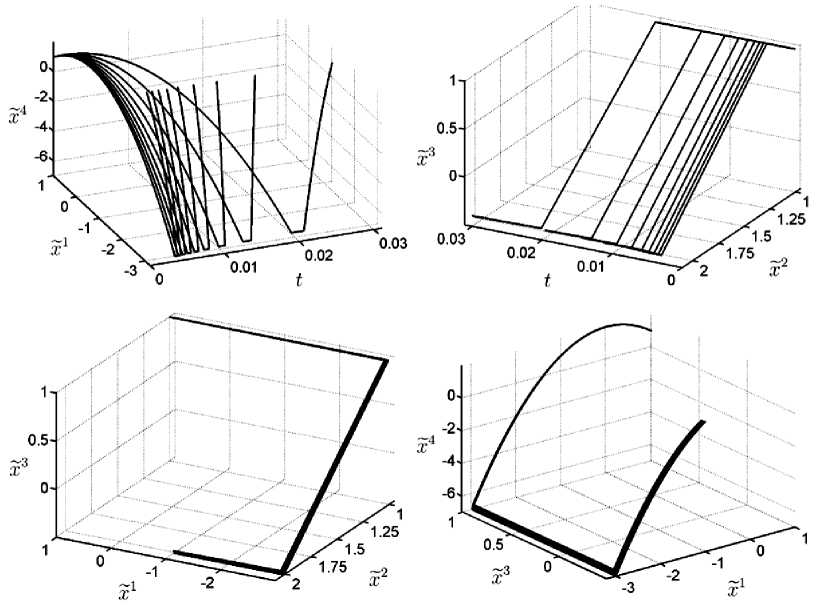
Рис . 2
Далее по аналогии. Получаем xq ( tq + 0) = ( - 1,0,0, - 2.8 ) , yq ( tq ) - y ( tq ) = A t = 0.2 . В таблице 1 приведены интересующие нас значения по каждому из пяти промежутков.
Таким образом, xq(t) = t-(1 + jAt), x4(t) = yq(tj)-(.xE(tj + 0))2 при tе (tj,tj+1], j = 0, q -1, и xq’ 3(t) = 0 при t e [t0, t ]. Эти формулы справедливы для любого числа q > 0 . Образуется последовательность {xq (t)} , сходящаяся к xE (t) равномерно на [t0, tq ], причем
I ( ^ q 2) = y q ( t q ) ^ У ( t q ) = тГ 1 ( U ) ^ □
Таблица 1
|
t j |
( x E ( t j ), x E ( t j ) ) |
y ( t j -) |
( x ; ( t , + 0), x q ( t , + 0) ) |
y q ( t j ) |
|
0 |
(-1, -1) |
0 |
(-1, -1) |
0 |
|
0.2 |
(—1, -1.4) |
-0.4 |
(-1, -1.36) |
-0.36 |
|
0.4 |
(-1, -1.8) |
-0.8 |
(-1, -1.72) |
-0.72 |
|
0.6 |
(—1, -2.2) |
-1.2 |
(-1, -2.08) |
-1.08 |
|
0.8 |
(-1, -2.6) |
-1.6 |
(-1, -2.44) |
-1.44 |
|
1 |
(-1, -3) |
-2 |
(-1, -2.8) |
-1.8 |
-
5. Построение минимизирующей последовательности { u s ( t ) , x s ( t ) }
Заключительным этапом является построение последовательности кусочнонепрерывных управлений u s ( t ) и непрерывных кусочно-дифференцируемых траекторий x s ( t ) , на которой функционал стремится к инфимуму [6, 7].
Сначала при заданном q построим управление U qs ( t ) и траекторию X qs ( t ) . Затем укажем зависимость q ( s ) и тем самым получим формулы для задания минимизирующей последовательности { u s ( t ) , x s ( t ) }. Построение функций U qs ( t ) , X qs ( t ) производится с использованием рассмотренных в п. 2, 3 процедур. В узлах сетки (4.1) функция xq ( t ) имеет разрывы по построению, причем на промежутках непрерывности функция посчитана при и = U E . Для аппроксимации кусочно-непрерывной траектории xq ( t ) рассматривается в моменты t j ( j = 0, q ) предельная система (1.4) с краевыми условиями
x ( T i = 0) = x Tj = 0 = x q ( t j - 0) , x ( T f ) = x T F = x q ( t j + 0) , (5.1) причем xq ( 1 0 - 0) и xq ( tq + 0) означают x 0 и xq ( tq ) .
Итак, в каждой точке разрыва функции xq ( t ) рассматривается предельная система с условиями (5.1) и строится аппроксимация x ( t ) ее разрывной траектории x ( t ) в соответствии с описанными выше процедурами с той лишь разницей, что момент t f заранее не известен (раньше мы задавали его равным 1) и граничные состояния не задаются (как в таблице 1), а определяются исходя из значений пределов слева и справа для xq ( t ) в точках разрыва.
Пример 5. Используя полученные в примере 4 формулы для задания { xq ( t ) }, построим аппроксимацию x s ( t ) для xq ( t ) , указав зависимость q = q ( s ).
Для всех узлов t j по типу краевых условий имеем «особый» случай (п. 2.4). Управление U 2( t ) = 0 , т е [0, T F ] . Функция xx ( t ) задается по формуле (2.3), где константа x1 полагается произвольной - возьмем ее равной x q ( t j + 0) = x '( t j ) = - 1 , j = 0, q . По начальным данным x 14( T I ) = x q ’ 4( t j - 0) вычисляется число yq ( t j ) , которое, вообще говоря, не равно значению y ( t j ) , где y ( t ) = - 2 1 . Поэтому в формуле (2.5) константа x 4 определяется исходя из орбиты Q ( t j ., yq ( t j )) : х 4 = y q ( t j ) - ( x 1)2 = x T F .
y q ( j - ( T II )2, T = 0,
, yq ( t j ) - ( x 1)2, T e (0, r F ],
Имеем: x^T ) = «
x 1 = x 1 ( t> - 0), T = 0, T I q j x\t ) = J
x1 = -1, те (0,Tf], x2, 3(т) = 0, те [0,Tf].
Для аппроксимации разрывной траектории x( T ) предельной системы в каждый момент t j рассматривается система вида (3.1).
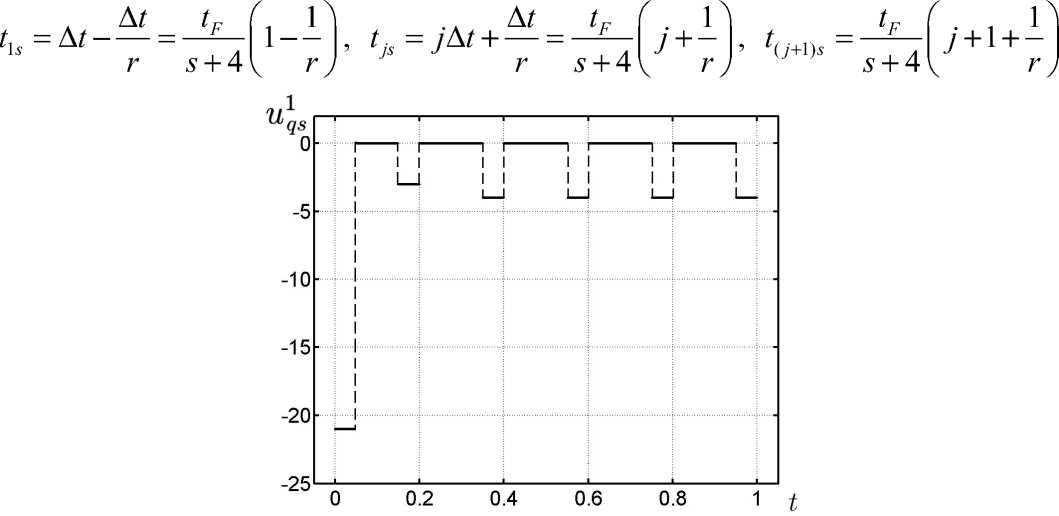
Из условий x\ t ) = 1 L j + 1 1 , x '(0) = x q ( t j - 0) , x '( T F ) = x 1 = x E ( t j + 0) = - 1 имеем при 1 1 =- 1 на [0, T F ] решение x '( T ) = x q ( t j - 0) + ( 1/ L j - 1 ) t , т е [0, t f ] , где T F определяется как момент достижения этой функцией заданного значения x T F = - 1 . Отсюда получаем T F = (( x q ( t j - 0) + 1) L j )[ ( L j - 1) . Решая задачу Коши t ( T ) = 1/ L j , t (0) = 0 и используя найденную формулу для T F , находим формулу для длины X промежутков, на которых применяются большие по абсолютной величине управляющие воздействия:
t(TF ) = =
Lj
( X q ( t j - 0) + 1) L j _ xq ( t j - 0) + 1
( L j - 1) L j
т At At
Формула для L j : X := — ( r > 2 ), — = rr
Lj - 1 x q ( t j - 0) + 1
^ 0 при L j ^ ^ .
Lj - 1
О
т , r ( x q ( t j - 0) + 1 )
L = 1 +--------------, где r - j At
доля длины шага A t = tF/q , задающая длину X промежутков, на которых применяется (сравнительно) большое по абсолютной величине управление.
На первом отрезке [10,/,| точку, в которой происходит достижение функцией xqs (t) значения xE. =-1, будем обозначать 10s. Длина промежутка [10,10s ] равна X. Далее, на ин- тервале (10s, txs) функция xqs (t) находится интегрированием исходной системы с управлениями uE 2(t) = 0. На отрезке [t1 s, t1 ] функция xqs (t) вычисляется как решение начальной задачи для исходной системы с начальным условием x(t1 s) = xqs (t1 s), определяющим начальное состояние для предельной системы, рассматриваемой в момент t1 . Итак, в предельной системе краевые условия следующие: x(TI = 0) =xqs (t1 s )» x(TF ) = xq (t1 + 0).
На последующих частичных отрезках предельная система рассматривается только для правых концов t ( j + 1) s частичных отрезков. На промежутках [ t ( j + 1) s , t j + 1] интегрируется одна и та же система, но с разными начальными данными. По теореме о непрерывной зависимости решений от начальных данных заключаем, что значение xqs ( t j + 1) не должно существенно отличаться от xq ( t j + 1 + 0) .
В момент 1 0 = 0 имеем yq (0) = 0 . На отрезке [ 1 0, t 1 ] применяется управление:
-( 1 + r / A t ) ,
t е [0,10s ], uqs (t)=J UE (t) - 0,
- ( 1 + ( r ( x qs ( t 1 s ) + 1))/ a t )
t е ( t 0 s , t 1 s ),
1 - r , t e [ t , s , t , ],
(5.2)
где x qs ( t 1 s ) = a t -
2A t
r
- 1 . Интегрируя систему при u 1 = u qs ( t ) (рис. 6), находим
- rt / A t ,
t e [0, t о s ],
x qss ( t ) =<
A t t ---1, r
t e ( t 0 s , t 1 s ),
qs 0 s
A t + r
^^^^M
.
r
(2 - r ) t + r A t - 2 A t - 1, t e [ t 1 s , t 1 ],
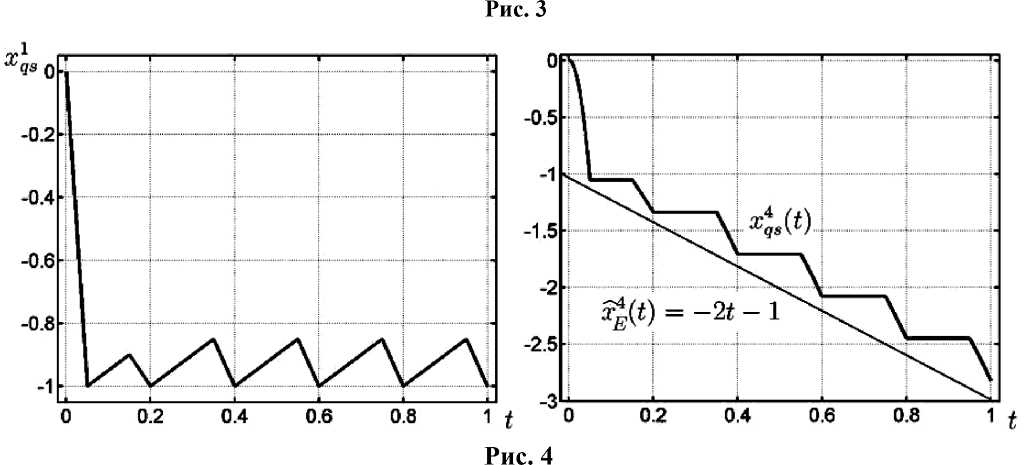
Пусть, например, q = 5 , r = 4 . Тогда X = 0.05 ,
X is ( 1 0 s ) = - 1 ,
x 4 ( t о s ) =- 1.05,
x is ( t i s ) = - 0.9 , x is ( t i ) = - 1 (рис. 7).
На последующих частичных отрезках [ t j , t j + 1] ( j = 1, q - 1 ):
' u E ( t ) = 0,
t e [ t j , t ( j + 1) s ),
u is ( t ) =<
-
Г 1 + r ( xq s ( t ( j + 1) s ) + 1) 1
V
A t
- r ,
t e [ t ( j + 1) s , t 1
(5.3)
где x \s ( t ( j + 1) s ) = A t
A t
^^^^M ^^^^M
r
При r ^ ^ имеем x 1qs ( t ( j + 1) s ) ^ x q ( t 1 ) = a t - 1 Пусть q ( s ) = s + 4 . Тогда
и
x qs ( t ( j + 1) s ) ^ • x E —
- 1 при A t ^ 0 .
A t = -FL - , x 1 ( t J = -FL- 1 1 s + 4 s 1 s s + 4 V
^— ^—
r
1 , x s ( t ( j + 1) s ) = st + 4 V 1
^— ^~
r
1 ,
tF
= A t
0 s r r ( s + 4) ,
.
При фиксированном r (например, r = 4 ) и 5 ^ ^ имеем:
x 1 ( t ( j + 1) 5 ) ^ x E
1 , t j + 1
A t ~ tpj tp ( j + 1)
FF t (j+1) 5 r ^ 0, j ^ 5 + 4 tj , t (j+1) 5 ^ 5 + 4 tj+1 .
Используя формулы (5.2), (5.3), задающие явно управление u1qs(t) , построим численно аппроксимирующую траекторию xqs (t) и найдем соответствующее значение функционала I (uq-2("), xqJ4(')). Положим r = 4 и 5 = 1, тогда q(5) = 5, At = 0.2, X = 0.05 . В этом случае получаются функции uq5 (t) и xqJ4 (t), где q = q(5) = 5 , графики которых изображены на рис. 3, 4. Значение функционала I (uq- 2("), xqJ 4(")) = -1.81816 = inf I (u, x) = -2.
Таблица 2
|
s |
q |
I ( u 1 , x 1 ) |
s |
q |
I ( « 5 -!, x j-4 ) |
|
|
2 |
6 |
–1.8475 |
13 |
17 |
–1.9505 |
|
|
3 |
7 |
–1.8691 |
15 |
19 |
–1.9574 |
|
|
4 |
8 |
–1.8852 |
20 |
24 |
–1.9702 |
|
|
5 |
9 |
–1.8984 |
25 |
29 |
–1.9795 |
|
|
7 |
11 |
–1.9175 |
30 |
34 |
–1.9865 |
|
|
9 |
13 |
–1.9315 |
40 |
44 |
–1.9975 |
|
|
11 |
15 |
–1.9421 |
||||
Считаем q = q ( 5 ) = 5 + 4 и r = 4. Проведем численные расчеты с использованием формул (5.2) и (5.3), увеличивая номер s . В таблице 2 представлены результаты вычислений.
Вычислительный эксперимент иллюстрирует, что I ( u 1 - 2 ( - ), x 1 - 4 ( - ) ) ^ inf I ( u , x ) = - 2 при 5 ^ ^ . □
Заключение
Основным результатом данной статьи является демонстрация возможности построения минимизирующих последовательностей и их специфики в системах, где условие Фробениуса не выполняется. Исследование основано на известном методе расширения исходной задачи до производной задачи [7], а также на предложенном в работах [11 – 13] подходе к построению допустимых в исходной системе траекторий предельной системы общего типа.
В статье рассмотрена ситуация, когда интеграл предельной системы выписывается в явном виде, что не всегда возможно. Перспективным является исследование ситуации с неявным описанием орбиты по аналогии с [7, 14]. В общем случае решение производной задачи будет находиться итерационно некоторым методом, работающим в невырожденных задачах. Поэтому в перспективе разработка итерационного метода улучшения управлений в терминах исходной задачи.
