Построение многофункциональной электрореактивной двигательной подсистемы космического аппарата

Автор: Ермошкин Ю.М., Кочев Ю.В., Волков Д.В., Якимов Е.Н., Остапущенко А.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 2 т.21, 2020 года.
Бесплатный доступ
Распространенным способом формирования электрореактивной двигательной подсистемы космического аппарата является создание специализированного оборудования или подбор наиболее подходящего из уже готового. Однако нередки случаи, когда применение имеющегося оборудования недостаточно оптимально и приводит к неоправданному увеличению массы подсистемы. Поэтому представляет интерес вопрос о возможности создания некоторого минимального набора оборудования, из которого можно было бы оптимальным образом формировать двигательные подсистемы. Представлен набор задач, варианты использования и возможные схемы размещения двигателей коррекции орбиты на космическом аппарате. Перечень необходимых элементов электрореактивной двигательной подсистемы представлен следующим образом: блок коррекции, бак, блок подачи рабочего тела, система преобразования и управления, состоящая из отдельно выполненного силового блока и коммутационных блоков, комплект кабелей и трубопроводов, программное обеспечение и приводные механизмы для управления вектором тяги двигателей (как опция). Определена необходимая вместимость баков рабочего тела для задачи коррекции и довыведения спутника на геостационарную орбиту при использовании высокоимпульсного холловского двигателя: до 100 кг для задач коррекции орбиты, до 200 кг для задач довыведения и коррекции. С учетом схемы размещения двигателей на корпусе космического аппарата определены требуемые углы прокачки для механизмов управления вектором тяги двигателей. Показано, что в случаях, когда для увеличения суммарной тяги требуется применять два и более двигателя, в весовом отношении выгоднее применять вместо моноблочных систем преобразования и управления комбинацию из силовых и коммутационных блоков, причем преимущество может достигать десятков килограммов. При условии создания перечисленного набора функциональных блоков предложенная концепция позволит легко формировать двигательные подсистемы космических аппаратов для решения достаточно широкого круга задач. Это позволит снизить затраты времени и средств на создание двигательных подсистем для новых космических аппаратов. (Русскоязычная версия представлена по адресу https://vestnik.sibsau.ru/articles/?id=677)
Двигатель, космический аппарат, система преобразования и управления, бак, блок подачи рабочего тела, коррекция орбиты
Короткий адрес: https://sciup.org/148321970
IDR: 148321970 | УДК: 621.455 | DOI: 10.31772/2587-6066-2020-21-2-233-243
Design of a multifunctional electric propulsion subsystem of the spacecraft
A common way to form an electric propulsion subsystem of the spacecraft is to create specialized equipment or to select the most suitable one from the ready-made ones. However, there are cases when the use of existing equipment is not optimal enough and leads to an unjustified increase of the subsystem mass. Therefore, the question of creating a minimum equipment set possibility from which it would be possible to form propulsion subsystems in optimal way is of interest. The set of tasks, variants of use and possible schemes of placing orbital correcting propulsion on the spacecraft are presented. The list of necessary propulsion subsystem elements is presented as follows: a thruster block, a tank, a xenon feed unit, a power processing unit consisting of a power unit and switching units, the complete set of cables and pipelines, the software and mechanical devices for control of the thrust vector (as an option). The necessary capacity of propellant tanks for the tasks of correction and raising of the satellite to GEO with a high-pulse Hall thruster is defined: for orbit correction tasks - up to100 kg, for orbit correction and raising to GEO tasks - up to200 kg. Necessary angle rates of mechanical devices for control of the thrust vector are defined taking into account possible schemes of placing thrusters on the spacecraft. It is shown that in cases when it is required to apply two or more thrusters to increase overall thrust, it is more preferable in the weight aspect to apply a combination of power and switching units instead of monoblock type of power processing units, and advantage can reach tens of kilograms. Provided the listed set of functional units is created, the offered concept will make it easy to form propulsion subsystems of the spacecraft for solving a wide range of tasks. It will reduce the time and money spent on creation of propulsion subsystem for new spacecrafts.
Текст научной статьи Построение многофункциональной электрореактивной двигательной подсистемы космического аппарата
Введение. Значительная часть автоматических космических аппаратов (КА) имеет в своем составе двигательные подсистемы, выполняющие задачи коррекции орбиты и управления угловым положением КА. Эти подсистемы могут быть построены на базе двигателей на химическом топливе или на базе электрореактивных двигателей (ЭРД). Из многочисленных типов ЭРД наибольшее распространение получили ионные и плазменные двигатели [1]. Они применяются в основном для задач, требующих больших затрат суммарного импульса (от 3000 кНс и более). Их преимущество перед двигателями на химическом топливе заключается в существенно большей (в разы) экономичности расходования рабочего тела. Однако для применения ЭРД необходимо использование специальных бортовых электронных приборов
(в отечественной литературе – системы преобразования и управления (СПУ), в зарубежной литературе – Power Processing Unit (PPU)), которые преобразуют напряжение бортового питания в напряжения, необходимые для работы двигателя.
Выбор типоразмера двигателя и построение двигательной подсистемы в целом, включая архитектуру СПУ, зависит от размера и типа космического аппарата и объема задач, возлагаемых на двигательную подсистему. Этот объем, характеризуемый величиной суммарного импульса и тяги, может различаться в несколько раз. Соответственно, и облик двигательной подсистемы, решающий эти задачи, должен быть существенно различным. Очевидно, что наилучшим решением в смысле минимальной общей массы является построение двигательной подсистемы на базе специально разработанных блоков для каждой отдельной задачи. Однако создание новых блоков подсистемы (двигатели, баки, СПУ) сопряжено со значительными затратами средств и времени. Поэтому на практике часто применяется другой подход – формирование двигательной подсистемы из уже готовых, т. е. законченных отработкой или имеющих летную квалификацию блоков. При этом возникает вопрос о том, каков должен быть набор и облик этих блоков, из которых можно было бы строить двигательные подсистемы различных КА, легко адаптируясь к разным задачам. Рассмотрению данного вопроса посвящена настоящая статья. Представлена концепция построения многофункциональной электрореактивной двигательной подсистемы на основе ограниченного количества типов составляющих элементов.
Перечень задач для многофункциональной электрореактивной двигательной подсистемы. Для многофункциональной двигательной подсистемы, применяемой на автоматических КА, можно сформулировать следующие задачи:
-
1) коррекция орбиты геостационарного КА;
-
2) довыведение КА на ГСО и коррекция его орбиты;
-
3) довыведение на ГСО и коррекция орбиты КА с одновременным созданием управляющих моментов;
-
4) коррекция орбиты КА на ВЭО (высокоэллиптической орбите);
-
5) «маршевая» задача – межорбитальное перемещение полезных грузов или обеспечение полета научных КА к телам Солнечной системы, обеспечение полетов сервисных беспилотных КА (обслуживание КА на ГСО, буксировка отработавших спутников на орбиту захоронения и т .п.).
Состав многофункциональной двигательной подсистемы и архитектура построения систем преобразования и управления могут быть различными в зависимости от решаемых задач и выбранной схемы размещения двигателей. Указанные различия являются следствием оптимизации двигательной подсистемы в части массовых характеристик.
Состав электрореактивной двигательной подсистемы. Исходя из задач, полный состав электрореактивной двигательной подсистемы можно определить следующим образом.
-
1. Двигательный блок или блок коррекции, состоящий, как правило, из блока газораспределения (БГР) и, собственно, двигателя, состоящего из анодного блока и двух катодов. Отметим, что отечественная школа традиционно предпочитает применение двух катодов с целью резервирования этого достаточно сложного и нагруженного элемента, но в зарубежной практике резервирование катодов в последнее время не применяют, основываясь на опыте эксплуатации и расчетных показателях надежности катодов.
-
2. Система преобразования и управления (СПУ). Необходимо иметь возможность запитывать один, два, три или четыре двигательных блока по выбору из определенного набора. Здесь возможны различные подходы, которые будут рассмотрены ниже. Важность поиска оптимальных решений по построению СПУ обусловлена следующими факторами, характерными для данного прибора:
– значительная масса;
– большое количество электронных элементов, высокая сложность прибора в целом;
– высокая стоимость летных образцов;
– значительные затраты средств и времени при разработке новых образцов.
-
3. Бак рабочего тела (блок хранения ксенона). С учетом достаточно больших заправок масса бака также имеет важное значение. При проектировании подсистемы возможны различные подходы: индивидуальный бак для каждой требуемой заправки или набор стандартных баков относительно малой размерности или один большой бак, допускающий различные заправки. Очевидно, что выбранная концепция должна обеспечивать минимальную массу конструкции бака или набора баков для каждой типовой задачи или групп задач с близкими требованиями.
-
4. Блок подачи ксенона. Данное устройство необходимо для понижения входного (бакового) давления до давления, требуемого по условиям работы двигателя. Диапазон расходов газа, обеспечиваемого таким устройством, может быть весьма велик – от миллиграммов (для питания плазменного двигателя) до граммов секунду (для питания газореактивных сопел, если применена газореактивная система вместо отдельной монотопливной двигательной подсистемы ориентации).
-
5. Комплект трубопроводов и кабелей, соединяющих источники газа и электроэнергии с потребителями.
-
6. Бортовое программное обеспечения (БПО) для управления блоками подсистемы.
-
7. Механические привода для управления вектором тяги двигателей (как дополнительная опция). В случае наличия таких устройств необходимо предусмотреть и наличие вспомогательной газореактивной системы для создания управляющих моментов в начальных режимах и режимах обеспечения живучести КА.
Количество двигательных блоков в системе может быть различным в зависимости от решаемых задач – от 1 до 8.
В качестве двигателя для многофункциональной электрореактивной двигательной подсистемы можно рассматривать применение как ионного, так и плазменного двигателя. В настоящей статье рассмотрим применение высокоимпульсного плазменного двигателя, например, из ряда двигателей, разработанных в Центре Келдыша [2] или в ОКБ «Факел» [3].
Такой двигатель имеет ряд преимуществ перед ионным: меньшая масса и габариты, относительная дешевизна при сопоставимой экономичности.
Количество двигателей, в зависимости от решаемых задач, может быть различным. Рассмотрим данный вопрос несколько подробнее, так как двигатели и их количество являются определяющими факторами при определении облика двигательной подсистемы. Так, для задачи 1 (коррекция орбиты геостационарного КА) при неподвижном закреплении двигателей количество двигателей может варьироваться от 4 до 8 (например, 4, 6, 8). Имеются примеры КА с 8 двигателями (4 – для коррекции долготы, 4 – для коррекции наклонения (рис. 1)) с обеспечением холодного резервирования, т. е. 4 двигателя – основные, 4 – резервные. Имеются примеры применения схемы с уменьшенным количеством двигателей: 6 (2 – для коррекции долготы, 4 – для коррекции наклонения (рис. 2)) или 4 универсальных двигателя, применяемых как для коррекции долготы, так и коррекции наклонения с обеспечением функционального резервирования (рис. 3).
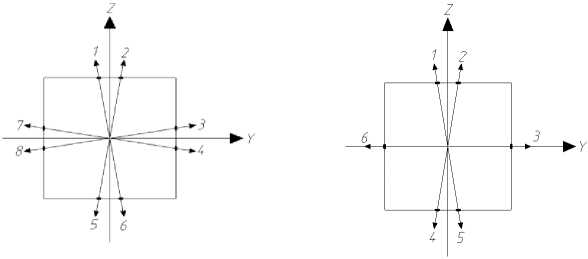
Рис. 1. Размещение восьми двигателей коррекции для коррекции орбиты в направлениях ±Y, ±Z (4 основных, 4 резервных)
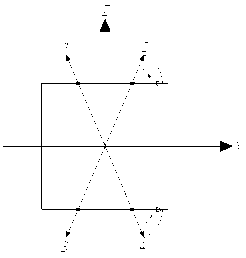
Рис. 3. Размещение четырех двигателей коррекции для коррекции орбиты в направлениях ±Y, ±Z.
Резервирование – функциональное
Fig. 1. Eight orbit correction thrusters placing in ±Y, ±Z directions (4 main, 4 reserve)
Рис. 2. Размещение шести двигателей коррекции для коррекции орбиты в направлениях ±Y, ±Z
Fig. 2. Six orbit correction thrusters placing in ±Y, ±Z directions
Fig. 3. Four orbit correction thrusters placing in ±Y, ±Z directions. Functional reserve
Для коррекции орбиты геостационарного КА массой 3–4 т достаточно тяги до 80–100 мН, которая может быть обеспечена одним двигателем [4]. Поэтому для решения перечисленных выше задач достаточно одного резервированного прибора питания и управления с возможностью запитки одного двигателя из 8-ми или одного из 4-х. Вариант с 6-ю двигателями может быть с некоторой избыточностью обеспечен СПУ с запиткой одного двигателя из 8-ми.
Для задачи 2 (довыведение на ГСО и коррекция орбиты геостационарного КА) необходимо обеспечить на этапе довыведения повышенную тягу для сокращения времени довыведения. Можно использовать для этой цели специальные двигатели повышенной тяги и мощности (например, типа СПД-140). Однако с конструктивной и эксплуатационной точки зрения удобнее использовать на борту однотипные двигатели, а для повышения тяги на этапе довыведения работать парами или большим количеством двигателей, если позволяет располагаемая мощность системы электропитания (СЭП) КА.
При неподвижном закреплении на корпусе КА для довыведения желательно использовать одновременно, как минимум, 2 отдельных двигателя, т. е. обычную схему 4 или 6 двигателей коррекции надо дополнить еще двумя двигателями довыведения (рис. 4). Разместить их целесообразно по оси +Х, направив реактивные струи в зону, свободную от элементов конструкции КА. Для выдачи этими двигателями импульса тяги по направлению ±Y, т. е. по вектору скорости, спутник необходимо повернуть вкруг оси Z на 90°. Необходимо также обеспечить возможность запитки 2-х двигателей одновременно по выбору из 6-и или 8-и. Отметим, что на этапе довыведения вследствие его ограниченности по времени (не более полугода при сроке службы 15 лет и более) можно обойтись без резервирования силовых преобразователей в СПУ, т. е. ограничиться их парой.
Если тяги 2-х двигателей на этапе довыведения недостаточно, то может быть дополнительно использован один или два двигателя (в пределах располагаемой мощности СЭП) (рис. 5). Соответственно должны быть обеспечены возможности для их запитки.
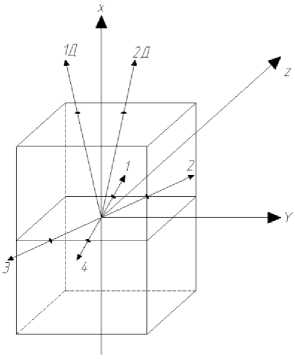
Рис. 4. Размещение четырех двигателей коррекции для коррекции орбиты и двух двигателей для довыведения
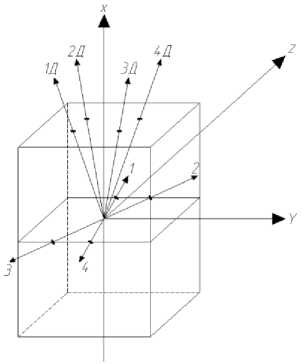
Рис. 5. Размещение четырех двигателей коррекции для коррекции орбиты и четырех двигателей для довыведения
Fig. 4. Four orbit correction thrusters placing and two orbit raising thrusters (R) placing
Fig. 5. Four orbit correction thrusters placing and four orbit raising thrusters (R) placing
При установке двигателей на приводах, например, аналогичных европейским, разработанным для КА EUROSTAR 3000 [5], помимо создания управляющих моментов, по крайней мере, по двум осям, возникает принципиальная возможность получить для довыведения тягу двух двигателей одновременно в одном требуемом направлении (см. рис. 3). В этом случае необходимо обеспечить запитку двух двигателей из четырех.
Построение системы преобразования и управления двигателей. Важным вопросом является формирование концепции построения прибора СПУ для обеспечения питания двигателей. Традиционным подходом является создание специализированного прибора для наиболее распространенных вариантов применения двигателей, т. е. для обеспечения работы одного двигателя из двух, четырех или восьми по выбору [6; 7].
Однако для решения всего спектра задач, в особенности там, где требуется одновременная работа двух и более двигателей, использование таких СПУ недостаточно рационально, так как требует применения двух и более СПУ либо разработки специальных модификаций прибора для одновременной запитки нескольких двигателей, что нерационально, так как приводит либо к дополнительным затратам массы, либо требует проведения новой разработки с соответствующими затратами средств и времени. Можно предложить другой подход, который позволит минимизировать как затраты массы для решения разнообразных задач, так и затраты на разработку СПУ. По этой концепции необходимо разделить задачи, т. е. создать нерезервированный силовой блок, позволяющий напрямую (без коммутации) запитывать один двигатель и два коммутационных блока – для запитки одного двигателя из двух (обозначим его условно КБ-2) и одного двигателя из четырех (КБ-4). Ниже, в табл. 1 и на рис. 6–14 показано, что комбинацией из этих трех блоков можно обеспечить с необходимым уровнем резервирования запитку одного, двух, трех, четырех двигателей из определенного набора. Возможные варианты запитки БК с использованием силовых и коммутационных блоков представлены графически на рис. 6–14.
Оценки, проведенные с учетом имеющегося уровня совершенства коммутационной техники, показывают, что при решении задач, предусматривающих работу только одного двигателя во время всей миссии (запитка одного двигателя из четырех, шести или восьми), более предпочтительным является вариант с применением моноблочных СПУ. Однако в случае необходимости запитки двух и более двигателей применение комбинации из указанных выше силовых и коммутационных блоков позволяет достичь заметной экономии массы с сохранением необходимого уровня резервирования. При этом преимущество может достигать десятков килограммов, что является весьма существенной величиной, которая вполне может оправдать затраты на разработку силового и коммутационных блоков.
Таблица 1
Варианты построения схемы питания двигателей
|
Задача |
Кол-во двиг. |
Вариант запитки |
Количество блоков |
AM s [кг] *** |
||||
|
Вариант моноблочного СПУ |
Вариант на базе силового блока и коммутационных блоков |
|||||||
|
СПУ для пит. 1 двиг. из 4-х |
СПУ для пит. 1 двиг. из 8-ми |
Силовой блок |
КБ-2 |
КБ-4 |
||||
|
Геостационарные и высокоэллиптические КА |
||||||||
|
1. Коррекция ГСО |
8 |
1 из 8 |
- |
1 |
2 |
- |
2* |
Минус 13 |
|
2. Коррекция ГСО |
6 |
1 из 6 |
- |
1 |
2 |
1* |
1* |
Минус 8 |
|
3. Коррекция ГСО |
4 |
1 из 4 |
1 |
- |
2 |
- |
1 |
Минус 8 |
|
4. Коррекция ВЭО |
4 |
2 из 4 постоянно |
2 |
- |
3** |
- |
1* |
11 |
|
5. Коррекция ВЭО |
6 |
2 из 6 постоянно |
- |
2 |
3** |
1* |
1* |
18,5 |
|
6. Довыведение и коррекция ГСО |
4 |
2 из 4 временно, 1 из 4 постоянно |
2 |
- |
2 |
- |
1 |
25,5 |
|
7. Довыведение и коррекция ГСО |
6 |
2 из 6 временно, 1 из 6 постоянно |
0 |
2 |
2 |
1* |
1* |
33 |
|
8. Довыведение и коррекция ГСО |
8 |
2 из 8 временно, 1 из 8 постоянно |
0 |
2 |
2 |
- |
2* |
28 |
|
9. Ускоренное довыведение и коррекция ГСО |
8 |
4 из 8 временно, 1 из 4 постоянно |
4 |
- |
4 |
1* |
1* |
56 |
|
Маршевая задача |
||||||||
|
10. Длительная непрерывная работа (разгон, торможение) |
2 |
2 из 2 |
2 |
- |
3** |
1 |
- |
16 |
|
2 |
- |
- |
38 |
|||||
|
11. Длительная непрерывная работа (разгон, торможение) |
3 |
3 из 3 |
3 |
- |
4** |
- |
1 |
30 |
|
3 |
- |
- |
57 |
|||||
|
12. Длительная непрерывная работа (разгон, торможение) |
4 |
4 из 4 |
4 |
- |
5** |
- |
1 |
49 |
|
4 |
- |
- |
76 |
|||||
* при условии применения кабелей-разветвителей
** один силовой блок в холодном резерве
*** разница в суммарной массе варианта моноблочных СПУ и варианта на базе силового блока и блоков коммутации
Для случая, когда требуется одновременная работа двух двигателей одновременно в течение ограниченного времени (например, при довыведении КА на ГСО), от холодного резерва по силовому блоку можно отказаться, ограничившись только двумя силовыми блоками, в этом случае весовое преимущество вариантов на базе комбинаций силового и коммутационных блоков еще более увеличивается.
Таким образом, концепция разделения СПУ на силовой и коммутационные блоки является более гибкой и позволяет решать различные задачи, предполагающие работу нескольких двигателей более оптимальным способом по сравнению с вариантом моноблочных СПУ. Возможны и варианты с прямой запиткой двигателей без коммутационных блоков. В этом случае каждому двигателю соответствует свой силовой блок. Количество таких комплектов двигатель – СПУ может составлять от одного до четырех в разумном диапазоне доступной мощности СЭП. Еще одним важным преимуществом концепции построения системы преобразования и управления на базе отдельных блоков является отсутствие необходимости разработки новых вариантов моноблочной СПУ для каждой новой задачи, что дает возможность существенно снизить затраты времени и средств на создание двигательной подсистемы.
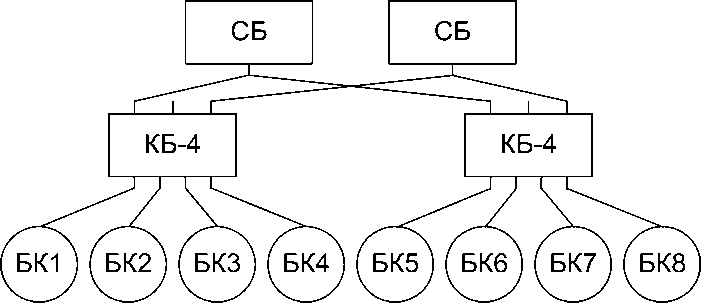
Рис. 6. Запитка одного двигателя из восьми или двух из восьми временно и одного из восьми постоянно
Fig. 6. The powering of one thruster from the eight ones or temporary powering of two thrusters from the eight ones and constant powering of one thruster from the eight ones
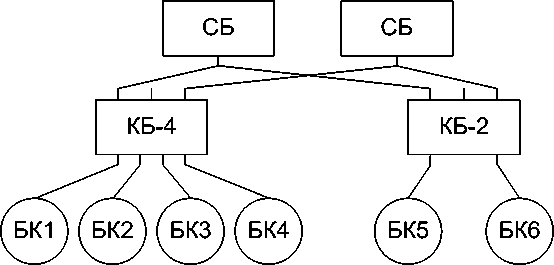
Рис. 7. Запитка одного двигателя из шести или двух из шести временно и одного из шести постоянно
Fig. 7. The powering of one thruster from the six ones or temporary powering of two thrusters from the six ones and constant powering of one thruster from the six ones
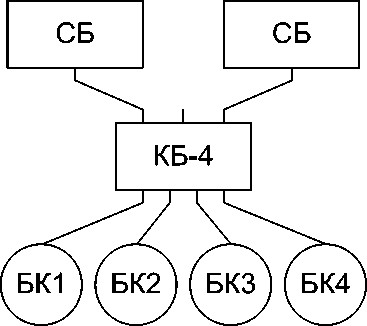
Рис. 8. Запитка одного двигателя из четырех или двух из четырех временно и одного из четырех постоянно
Fig. 8. The powering of one thruster from the four ones or temporary powering of two thrusters from the four ones and constant powering of one thruster from the four ones
Рис. 9. Запитка двух из четырех двигателей постоянно
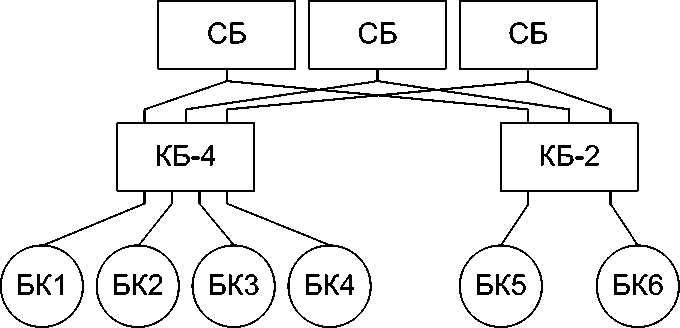
Рис. 10. Запитка двух из шести двигателей постоянно
Fig. 10. Constant powering of two thrusters from the six ones
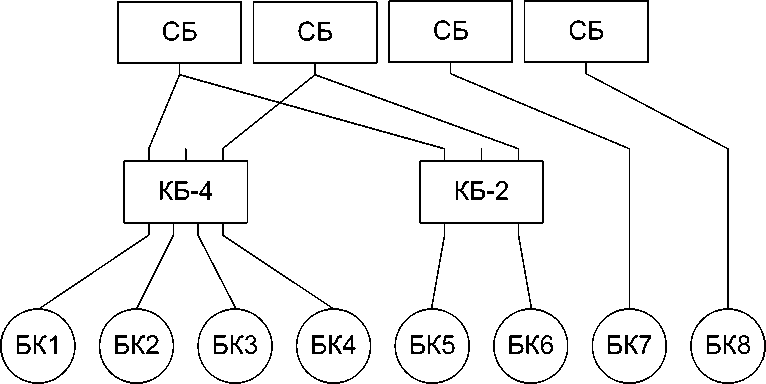
Рис. 11. Запитка четырех из восьми временно и одного из четырех постоянно
Fig. 11. Temporary powering of four thrusters from the eight ones and constant powering of one thruster from the four ones
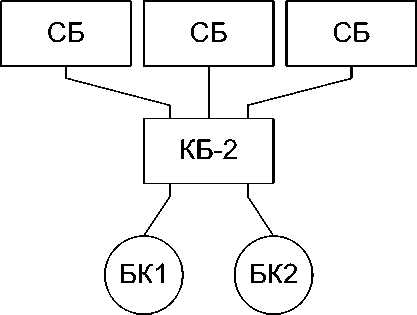
Рис. 12. Запитка двух из двух двигателей постоянно с резервированием по силовому блоку
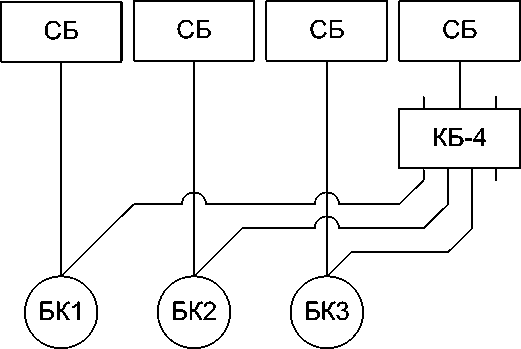
Рис. 13. Запитка трех из трех двигателей постоянно с резервированием по силовому блоку
Fig. 13. Constant powering of three thrusters from three ones with PPU reservation
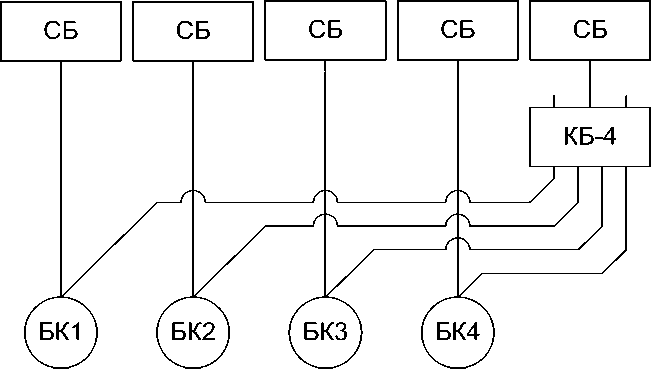
Рис. 14. Запитка четырех из четырех двигателей постоянно с резервированием по силовому блоку
Fig. 14. Constant powering of four thrusters from four ones with PPU reservation
Оценка потребной вместимости баков. Для типовой задачи довыведения и коррекции орбиты геостационарного КА массой порядка 3000 кг в течение 15 лет требуется около 4100 кНс (≈420 т·с) суммарного импульса. В качестве двигателя для перспективной двигательной подсистемы целесообразно выбрать двигатель мощностью порядка 2 кВт с удельным импульсом до 2700 с. При таком удельном импульсе для выработки данного суммарного импульса потребуется 156 кг ксенона. С учетом 10 % запаса на утечки, невырабатываемого остатка и гарантийного запаса, заправка должна составить 170 кг. С учетом дополнительных 10–15 кг на обеспечение работы пневмосистемы на холодном газе, необходимой для прохождения начальных режимов ориентации и режимов обеспечения живучести в варианте системы с приводами, общий запас составит до 187 кг. Таким образом, вместимости бака в 200 кг ксенона достаточно для обеспечения перечисленных задач. Отметим, что при наличии монотопливной двигательной подсистемы ориентации можно отказаться от пневмосистемы на холодном газе и приводов для создания управляющих моментов.
Если задача довыведения не ставится, то для обеспечения коррекции орбиты будет достаточно порядка 200 т·с суммарного импульса. Соответственно, достаточно вместимости бака 100 кг с учетом запаса на утечки, невырабатываемого остатка, гарантийного остатка и запаса для обеспечения работы пневмосистемы на холодном газе (если таковая имеется). Таким образом, для работы двигательной подсистемы достаточно иметь баки вместимостью 100 и 200 кг. Желательно, чтобы баки имели идентичные габариты и конструктивное исполнение, отличаясь лишь толщиной силовой оболочки и весом, например, на базе бака, разработанного в АО «ИСС» [8]. Комбинацией таких баков можно при необходимости легко получить общую вместимость в 300 и 400 кг. С учетом реально достигнутого совершенства конструкции баков, характеризуемого величиной бакового коэффициента (отношение массы бака к максимальной заправке) порядка 0,1, экономия массы в случае создания бака вместимостью 200 кг может достигать около 10 кг, для бака вместимостью 100 кг - до 20 кг по сравнению с вариантом размещения запаса рабочего тела в баке вместимостью 300 кг.
Требования к блоку подачи ксенона. При расходе ксенона в один двигатель порядка 4 мг/с и одновременной работе до четырех двигателей необходимо обеспечить расход до 16 мг/с. Для работы пневмосистемы на холодном газе, когда работают максимум 4 сопла одновременно, необходимо обеспечить расход порядка 1,6 г/с. Таким образом, при наличии пневмосистемы необходим блок подачи ксенона с очень большим диапазоном расходов, от 4 мг/с до 1.6 г/с.
Основные требования к приводу (механизму ориентации) двигателей. Если взять за основу крестообразную схему размещения четырех двигателей (рис. 3) с оптимальным отклонением линии действия тяги от направления Z порядка 20–25°, то для выдачи тяги в направлении Y (для довыведения) необходимо развернуть два двигателя на угол порядка 70°. Для обеспечения управляющего момента по тангажу (вкруг оси Z) необходимо один или два двигателя развернуть в сторону ±Х на угол порядка 90°. Таким образом, желательно иметь двухстепенной привод для одного двигателя с углами прокачки до ±90°. Если для изменения положения двигателей предусмотрены еще и штанги, приводы такого типа можно разместить в их корневой и концевой части.
С учетом изложенного количественный состав составляющих элементов двигательной подсистемы для решения представленных в табл. 1 задач представлен в табл. 2.
Таблица 2
Количественный состав элементов электрореактивной двигательной подсистемы для решения различных задач
|
Блок |
Возможное количество в двигательной подсистеме |
|
БК (двигатель) |
до 8 |
|
СПУ (силовой блок) |
до 5 |
|
КБ-2 (коммутационный блок с выходом на 2 двигателя) |
до 2 |
|
КБ-4 (коммутационный блок с выходом на 4 двигателя) |
до 2 |
|
БПК (блок подачи ксенона с большим диапазоном расходов) |
1 |
|
Б-100 (бак вместимостью 100 кг) |
1 |
|
Б-200 (бак вместимостью 200 кг) |
1 |
|
Комплект кабелей |
1 |
|
Комплект трубопроводов |
1 |
|
Бортовое программное обеспечение (БПО), комплект |
1 |
|
Газореактивные сопла (для варианта с приводами) |
до 8 |
|
Дополнительно |
|
|
Двухстепенной привод с углами прокачки ±90° |
4 |
|
Устройство поворота с двухстепенными приводами и штангами |
2 |
Заключение. Показано, что при условии создания высокоимпульсного плазменного двигателя мощностью порядка 2 кВт, силового преобразовательного блока, коммутационных блоков с выходом на два и четыре двигателя, блока подачи ксенона с широким диапазоном расходов, баков на 100 и 200 кг ксенона, а также, в качестве дополнительной опции, двухстепенных приводов или комбинации приводов со штангами, можно сформировать электрореактивную двигательную подсистему для решения широкого круга задач – от коррекции орбиты в простейшем варианте четырех неподвижно установленных двигателей до многофункциональной системы, обеспечивающей довыведение КА на ГСО, коррекцию орбиты и создание управляющих моментов. Наличие перечисленных блоков позволит формировать также двигательные подсистемы для решения разнообразных маршевых задач в достаточно широком диапазоне располагаемой мощности бортовой системы электропитания. Построение системы преобразования и управления в виде отдельных силовых и коммутационных блоков позволит во многих случаях снизить массу, упростить формирование двигательной подсистемы в целом, снизить затраты на ее разработку. Таким образом, представленная концепция в случае ее реализации позволит создать условия для расширения в обоснованных случаях сферы применения электрореактивных двигательных подсистем и повышения на этой основе общей эффективности космических аппаратов за счет снижения массы двигательной подсистемы по сравнению с альтернативными типами, в частности подсистемами на базе химических двигателей.
Список литературы Построение многофункциональной электрореактивной двигательной подсистемы космического аппарата
- Lev D., Myers R. V., Lemmer K. M. et al. The Technological and Commercial Expansion of Electric Propulsion in the Past 24 Years. 35th Electric Propulsion Conference. IEPC-2017-242. Georgia Institute of Technology. USA, October 8-12, 2017, 18 p.
- Lovtsov A. S., Tomilin D. A., Muravlev V. A. Development of the high-voltage Hall-effect thrusters in the Keldish Research Centre. 68th International Astronautical Congress. IAC-17-C4.4.4, Adelaide, Australia, 25-29 September 2017, 5 p.
- Gnizdor R., Komarov A., Mitrofanova O., Saevets P., Semenenko D. High-impulse SPT-100D Thruster with discharge power of 1.0...3.0 kW. The 35th International Electric Propulsion Conference, Georgia Institute of Technology. USA, October 8-12, 2017, 8 p.
- Ermoshkin Yu. M., Bulynin Yu. L. [Assessment of the minimum permissible thrust of engines for correcting the orbit of geostationary satellites]. Upravlenie dvizhe-niem i navigaciya letatelnykh apparatov. Chast 1. Sbornik trudov XIII Vserossiiskogo nauchno-tekhnicheskogo seminara po upravleniyu dvizheniem i navigacii letatelnykh apparatov. Samara, 13-15 june 2007. P. 109-111 (In Russ.).
- Falkner M., Nitschko T., Zemann J., Mitterbauer G., Traxler G. Electric Propulsion Thruster Pointing Mechanism (TPM) For EUROSTAR 3000: Design & Development Test Results. The 29th International Electric Propulsion Conference. IEPC-2005-001. Princeton University, Okt. 31 - Nov. 4, 2005, 10 p.
- Gollor M., Schwab U., Boss M., Bourguignon E. et al. Power Processing Units - activities in Europe 2015. 34th International Electric Propulsion Conference. IEPC-2015-225, Kobe-Hyogo, Japan, July 4-10, 2015, 13 p.
- Gladuchenko V. N., Galaiko V. N., Gordeev K. G., Ermoshkin Yu. M., Mikhailov M. V., Yakimov E. N. Modern status and future directions of evolution of power processing units for electric plasma thrusters. Electronic and electromechanical systems and devices. Scientific papers, JSC "NPC "Polus". Tomsk Polytechnic University Press, 2016, p. 59-65.
- Kravchenko I. A., Mikheev A. V., Borodin L. M. Application features of metal composite tanks on board of SC. Proceedings of XYII International conference "Re-shetnevskie chteniya". 12-14 November, Krasnoyarsk, 2013, P. 71-72.
- Ermoshkin Yu. M., Yakimov E. N On the concepts of the station keeping and geostationary orbit injection thruster's application. Proceedings of XVI International conf. "Aviation and Space". Moscow, 2017, Nov. 20-24, P. 92-93.
- Ermoshkin Yu. M. [Electric propulsion's rational application range on the applied spacecrafts]. Vestnik SibGAU. 2011, No. 2 (35), P. 109-113 (In Russ.).
- Yermoshkin Yu. M., Volkov D. V., Yakimov E. N. On the concept of "all electric propulsion spacecraft". Siberian Journal of Science and Technology. 2018, Vol. 19, No. 3, P. 489-496. Doi: 10.31772/2587-60662018-19-3-489-496.
- Ostrovsky V. G., Sukhov Yu. I. [Development and operation of electric thrusters and electric propulsion systems at OKB-1 - TsKBEM - NPO "Energia" - RSC "Energia" named S.P.Korolev (1958-2011)]. Raketno-kosmicheskaya tekhnika. Trudy. 2011. Ser. XII., Iss. 3-4, P. 122-127 (in Russ.).
- Khodnenko V. P. Activities of VNIIEM in EPT field. History, our days and prospects. 33rd International Electric Propulsion Conference. IEPC-2013-65. The George Washington University. D.C. US. October 6-10, 2013.
- De Tata M., Frigor P., Beekmans S. et al. SGEO Electric Propulsion Subsystem Development Status and Future Opportunities. 33rd International Electric Propulsion Conference. IEPC-2013-144. The George Washington University, USA, October, 6-10, 2013, 11 p.
- Ferreira J. L., Martins A. A., Miranda R. A. et al. Development of a Solar Electric Propulsion System for the First Brazilian Deep Space Mission. 35th Electric Propulsion Conference. IEPC-2017-166. Georgia Institute of Technology. USA, October 8-12, 2017, 14 p.
