Построение нечётких регуляторов для систем управления автономных объектов в среде SimInTech

Автор: В.А. Мызникова, В.В. Устименко, А.В. Чубарь
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 1, 2019 года.
Бесплатный доступ
Рассматривается управление автономным объектом на примере системы управления угловым положением искусственного спутника Земли. Представлена функциональная схема и упрощённая математическая модель системы автоматического управления угловым положением в виде структурной схемы, уравнения и передаточных функций её звеньев. Модель реализована в среде визуального динамического моделирования SimInTech в виде субмоделей, взаимосвязанных через базу данных сигналов. Рассмотрено управление объектом с использованием инерционно-дифференцирующего аналогового регулятора, дискретного ПИД-регулятора, а также регулятора на основе математической нечёткой логики. Проведена настройка параметров регуляторов с использованием типового блока «Оптимизация» в составе SimInTech. Критериями являются интегральная ошибка регулирования и максимальное значение регулируемой величины. На основе типовых блоков SimInTech построена и протестирована модель регулятора на основе нечёткой логики. Показаны особенности и основные шаги построения нечётких регуляторов в среде SimInTech. Сформулированы и описаны в виде лингвистических выражений правила нечёткого регулирования для управления угловым положением объекта. Представлены результаты моделирования системы с применением регуляторов различного типа.
Модель, регулятор, проектирование, визуальное моделирование, нечёткая логика
Короткий адрес: https://sciup.org/14114642
IDR: 14114642 | УДК: 629.7.05 | DOI: 10.26732/2618-7957-2019-1-22-27
Fuzzy controllers construction in the SimInTech environment
The control of an autonomous object on the example of the control system of the angular position of an artificial Earth satellite is considered. The functional scheme and the simplified mathematical model of automatic control system by angular position in the form of the block diagram, equations and transfer functions of its links are presented. The model is implemented in the SimInTech visual dynamic modeling environment as submodels interconnected through a database of signals. The control of the object by using an inertial-differentiating analog controller, a discrete PID controller, and a controller based on mathematical fuzzy logic is considered. Customizing parameters of controllers using the model «Optimization» in the SimInTech. The criteria are the integral control error and the maximum value of the controlled value. Based on standard blocks of SimInTech the model of controller on the basis of fuzzy logic are built and tested. Features and basic stages of fuzzy controller construction in SimInTech environment are shown. The rules of fuzzy control for controlling the angular position of an object are formulated and described as linguistic manifestations. The results of the system modeling using various types of controllers are presented.
Текст статьи Построение нечётких регуляторов для систем управления автономных объектов в среде SimInTech
Стадия проектирования является определяющей в жизненном цикле изделий штучного и мелкосерийного производства. Использование интегрированных систем проектирования технических устройств позволяет повысить их качество и сократить сроки разработки.
Одним из перспективных средств моделирования и разработки робототехнических и других сложных систем является среда визуального моделирования SimInTech [1; 2; 7 – 9], которая обеспечивает:
-
• создание моделей технических устройств в виде структурных блок-схем;
-
• математическое моделирование их режимов на основе дифференциальных уравнений;
-
• создание составных моделей технических объектов из готовых блоков – моделей оборудования;
-
• интеграцию в единую комплексную модель;
-
• отладку алгоритмов управления на модели и реальном объекте;
-
• автоматическую генерацию кода управляющих программ;
-
• автоматизацию выпуска конструкторской документации.
Одной из основных особенностей использования SimInTech для создания комплексных моделей является идеология использования «Базы данных сигналов» – структурированного списка переменных, обеспечивающих обмен расчётными значениями между расчётными схемами в единой модели. База данных сигналов SimInTech является объектной и обеспечивает пользователю удобное решение следующих задач:
-
• объединение нескольких расчётных схем в единую модель;
-
• обеспечение возможности векторной обработки сигналов для типовых алгоритмов управления;
-
• объектно-ориентированное проектирование модели технических систем;
-
• автоматизация создания и обработки переменных в комплексных моделях.
Для создания сложной математической модели происходит объединение моделей основных подсистем, реализованных в виде отдельных проектов, в единый пакет. В настоящее время пакет SimInTech используется на ряде предприятий ракетно-космической техники.
Во многих отраслях промышленности в отношении технических систем, характеристики которых в процессе работы могут изменяться в широком диапазоне, применяют алгоритм нечёткой логики [3; 4; 6].
Некоторые задачи, выполняемые искусственными спутниками Земли (ИСЗ), могут потребовать постоянного определения его местонахождения относительно Земли. В этом случае ИСЗ в любой момент полёта по орбите должен определять свои географические координаты и высоту над поверхностью Земли.
Эта задача является весьма сложной, и ее решение будет одним из основных факторов, отличающих автоматизированный ИСЗ от неавтоматизированного. Наиболее совершенными будут стабилизированные автоматизированные ИСЗ, которые должны занимать строго определенное, известное положение в пространстве [10; 11].
Стабилизация угловых положений ИСЗ на орбите необходима, во-первых, для удержания поверхности солнечной батареи в направлении на Солнце и, во-вторых, для придания определённого положения ИСЗ относительно Земли с целью автоматического фотографирования определённых участков земной поверхности, более надёжной связи с Землей, наблюдения за движением льдов, масс облаков, спасения кассет с результатами научных наблюдений и т. д.
Рассмотрим процесс построения нечёткого регулятора в среде SimInTech на примере системы управления угловым положением искусственного спутника Земли.
Постановка задачи
По заданной математической модели автономного объекта необходимо реализовать в среде SimInTech управление аналоговым, дискретным и нечётким регулятором. Также необходимо осуществить реализацию регуляторов и произвести настройку их параметров, и, затем, сравнить полученные результаты.
Динамическая модель объекта
Функциональная схема и исходные данные автономного объекта представлены в [5]. В качестве примера рассмотрим систему управления угловым положением ИСЗ (рис. 1).
Создадим динамическую модель (рис. 2) в среде структурного моделирования SimInTech функциональной схемы (рис. 1) по уравнениям её элементов [2].
Передаточная функция аналогового корректирующего устройства (КУ):
W = u3 = ky • p .
u 2 Ty • p + 1
Передаточная функция маховичного исполнительного органа по напряжению:
M v( P )
W, = ф ( p )
кИО ' koc ' p _ 30 p
ТИО • P + 1 5 P + 1
Передаточная функция корпуса ИСЗ:
Тисз • p2 1000 • p2
Здесь k = 2, ku = 10, km = 0,5 – коэффициенты усилителя корректирующего устройства, усилителя напряжения и усилителя мощности соответственно.
Применяя блок оптимизации, проведём настройку параметров аналогового регулятора в плоскости его параметров kky и Tky .
Кривая регулирования аналогового инерци-онно-дифференцирующего КУ представлена на рис. 6 под цифрой 1.
Статическая ошибка регулирования составляет 10 %. Дальнейшее уменьшение ошибки за счёт увеличения коэффициента kky невозможно, т. к. существенно снижается запас устойчивости системы.
Построение регуляторов
Для повышения точности ориентации объекта включим на вход системы дискретный ПИД-регулятор (рис. 3).
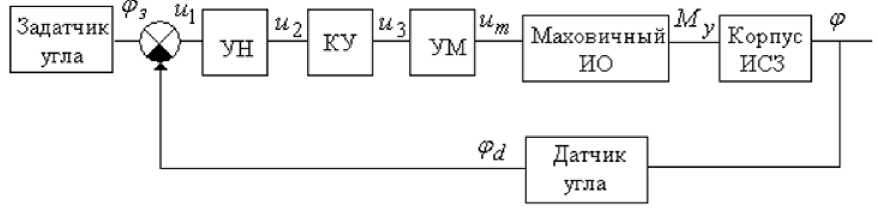
Рис. 1. Функциональная схема системы управления угловым положением искусственного спутника Земли [5]
Блок дискретного ПИД-регулятора представляет из себя субмодель, в которой используется стандартный блок «Дискретный ПИД-регулятор». Период квантования задан равным 0,001 и использован стандартный блок оптимизации среды SimInTech.
Параметры регулятора Kp , Ki , Kd
про-
порциональная, интегральная и дифференциальная составляющие соответственно – задаются в виде глобальных переменных и вносятся в блок «Сигналы». Для настройки регулятора используется блок «Оптимизация». В качестве метода оптимизации применяется симплекс-метод.
В результате оптимизации вектор из трёх коэффициентов (составляющих) направляется в блок «Запись в список сигналов», откуда вычисленные значения перенаправляются в дискретный ПИД-регулятор, изменяя его параметры. В блоке
Том 3
«Оптимизация» заданы следующие свойства: абсолютная точность подбора значений выходов – 0,01, начальное приближение выходов блока – 1, минимальное значение выходов блока – 0.
В рассматриваемом случае блок оптимизации рассчитал следующие оптимальные значения коэффициентов: Kp – 1,5, Ki – 0,1, Kd – 4,5.
Результаты моделирования представлены на рис. 6 под цифрой 2.
Далее реализуем регулятор на базе нечёткой логики [3; 6].
Для начала выполним фазификацию входной переменной. Наш блок будет получать на вход одно значение и оценивать его, насколько данная величина соответсвует заданным в параметрах термам. Мы будем расчленять исходную величину на несколько термов, рассчитывая для каждого терма функцию принадлежности µ( x ) типа кривой Гаусса.
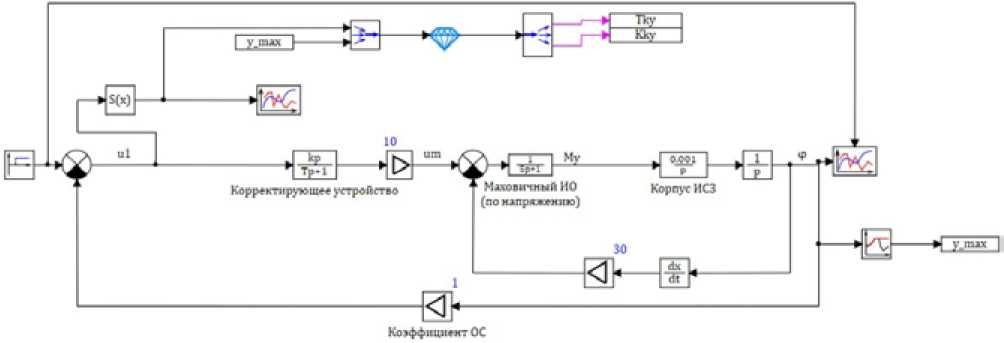
Рис. 2. Динамическая модель системы, реализованная в проекте SimInTech

Рис. 3. Динамическая модель системы управления угловым положением ИСЗ с применением дискретного ПИД-регулятора
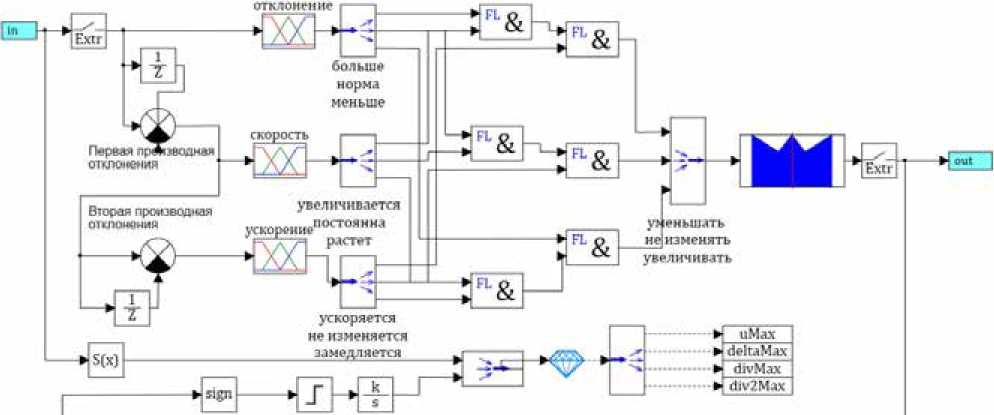
В базе правил нечёткой логики будем использовать следующие терма:
-
1. Для отклонения: меньше нормы, норма, больше нормы.
-
2. Для скорости: увеличивается, не изменяется, падает.
-
3. Для ускорения: ускоряется, не изменяется, замедляется.
Выход тоже будет иметь три лингвистические переменные: «уменьшать», «не изменять», «увеличивать».
Сформулируем правила нечёткого регулирования для управления угловым положением объекта и опишем их в виде лингвистических выражений:
-
1. Если больше нормы и отклонение растёт, а скорость роста увеличивается, то уменьшаем.
-
2. Если норма и отклонение не изменяется, а скорость постоянна, то не изменяем.
-
3. Если меньше нормы и отклонение падает, а скорость падения увеличивается, то увеличиваем.
Для удобства зададим следующие параметры в глобальные переменные и оптимизи-
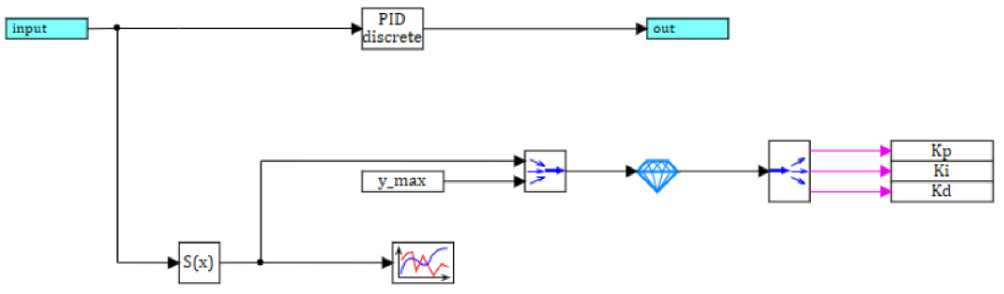
Рис. 4. Содержимое субмодели дискретного регулятора
Коои'*естви перёклямемий
Рис. 5. Содержимое субмодели нечёткого регулятора

Рис. 6. Результаты моделирования системы с применением регуляторов различного типа
руем их при помощи блока оптимизации среды SimInTech:
-
1. uMax – амплитуда управляющего воздей-
- ствия;
-
2. deltaMax – максимальное
-
3. divMax – максимальная клонения;
-
4. div2Max – максимальная дная отклонения.
отклонение;
производная от-
вторая произво-
Заключение
На основе типовых блоков SimInTech построена и протестирована модель регулятора на основе нечёткой логики, проведена настройка па-
Том 3
раметров модели при помощи блока оптимизации среды SimInTech.
Выполнено моделирование системы управления угловым положением ИСЗ с использованием инерционно-дифференцирующего аналогового регулятора, дискретного ПИД-регулятора, а также регулятора на основе нечёткой логики.
Регулятор на базе нечёткой логики обеспечивает качество переходного процесса, сопоставимое с ПИД-регулятором, обеспечивая при этом большую гибкость в настройке, но требует настройки большего количества параметров.
Аналогично в среде SimInTech могут быть построены нечёткие регуляторы для управления другими автономными объектами.
Список литературы Построение нечётких регуляторов для систем управления автономных объектов в среде SimInTech
- Карташов Б. А., Козлов О. С., Шабаев Е. А., Щекатуров А. М. Среда динамического моделирования технических систем SimInTech. М. : ДМК Пресс, 2017. 424 с.
- Грищенко И. А., Чубарь А. В. Создание математической модели робота с дифференциальным приводом // Материалы II Междунар. науч.-практ. конференции «Научно-технический прогресс: актуальные и перспективные направления будущего» / ООО «Западно-Сибирский научный центр». Кемерово, 2016. С. 35–27.
- Простой регулятор на базе нечеткой логики. Создание и настройка [Электронный ресурс]. URL: https://habr.com/post/413539/ (дата обращения: 06.03.2019)
- Гостев В. И. Нечеткие регуляторы в системах автоматического управления. Киев : Радіоаматор, 2008. 972 с.
- Воронин А. В. Теория автоматического управления. Основы построения и анализа систем автоматического регулирования : учеб.-метод. пособие. Томск : Издательство Томского политехнического университета, 2013. 51 с.
- Мызникова В. А., Устименко В. В., Чубарь А. В. Построение нечетких регуляторов в среде SimInTech // Материалы X Всеросс. науч.-техн. конференции с междунар. участием «Робототехника и искусственный интеллект» / Сибирский федеральный университет. Красноярск, 2018. С. 223–228.
- Козлов О. С., Кондаков Д. Е., Скворцов Л. М. и др. Программный комплекс для исследования динамики и проектирования технических систем // Информационные технологии. 2005. № 9. С. 20–25.
- Пожаркова И. Н., Чубарь А. В., Киселев О. И., Лагунов А. Н. Система контроля безопасности транспортного контейнера // Научно-аналитический журнал «Сибирский пожарно-спасательный вестник». 2018. № 3. C. 23–32.
- Пожаркова И. Н., Чубарь А. В., Грищенко И. А., Трояк Е. Ю. Моделирование технологического процесса в среде визуального моделирования SimInTech // Научно-аналитический журнал «Сибирский пожарно-спасательный вестник». 2018. № 2. C. 29–37.
- Александров А. Ю., Тихонов А. А. Электродинамическая стабилизация ИСЗ на экваториальной орбите // Космические исследования. 2012. Т. 50, № 4. С. 335–340.
- Тихонов А. А., Спасич Д. Т., Антипов К. А., Саблина М. В. Оптимизация электродинамического метода стабилизации искусственного спутника Земли // Автоматика и телемеханика. 2011. № 9. С. 112–120.
