Построение низкоэнергетической траектории перелета Земля – Луна – Земля с применением оптимизационных процедур

Автор: Кудлак В.В., Масленников А.Л.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.26, 2025 года.
Бесплатный доступ
В работе рассматривается задача проектирования низкоэнергетической траектории перелета космического аппарата (КА) Земля – Луна – Земля с использованием оптимизационных процедур. В работе предложен подход, сочетающий приближенный аналитический метод и эволюционный метод оптимизации, в котором реализуется построение схемы полёта КА с использованием метода сфер действия, в основе которого лежит разделение траектории на несколько участков. Каждый из участков является орбитой, определяемой в виде конического сечения. Первый участок траектории представляет собой геоцентрическую орбиту полета КА к Луне. На втором участке траектории описывается движение КА внутри сферы действия спутника по селеноцентрической орбите. Последний участок представляет собой траекторию ухода КА от Луны и возвращение на Землю по геоцентрической орбите. Для обеспечения пассивного облета Луны и последующего достижения КА Земли без использования дополнительных импульсных маневров параметры каждого участка траектории должны определяться начальными условиями. Для построения данной схемы полёта была сформулирована оптимизационная задача, направленная на определение начальных параметров, формирующих траекторию. Функционал качества как критерий минимизации учитывает расстояния максимального сближения КА с Луной и время полёта по траектории. Весовые коэффициенты в функционале качества позволяют настраивать задачу оптимизации, по сути, формируя приоритетность минимизации составляющих функционала качества. В результате решения оптимизационной задачи были подобраны начальные параметры траектории полёта к Луне при старте с орбиты Земли, обеспечивающие вхождение КА в сферу действия спутника и возможность дальнейшего возвращения на Землю без использования импульсных маневров. Результаты моделирования показывают принципиальную применимость рассмотренного подхода к проектированию лунных миссий.
Генетический алгоритм, траектория космического аппарата, проектирование миссии, оптимизация, пассивный перелёт
Короткий адрес: https://sciup.org/148332525
IDR: 148332525 | УДК: 521.322 | DOI: 10.31772/2712-8970-2025-26-4-532-543
Low-energy Earth – Moon – Earth flight trajectory design using optimization procedures
The problem of designing a low-energy Earth Moon Earth spacecraft flight trajectory using optimization procedures is considered. The proposed approach combines rough and ready analytical methods with numerical population-based optimization techniques, that results in significant reduction in computational time compared to existing methods that require boundary value problem solution and numerical integration of differential equations. The proposed approach to design a spacecraft flight scheme utilizes spheres of influence method, which involves segmenting the trajectory into several sections. Each section is represented as an orbit defined by a conic section. The first segment of the trajectory is a geocentric orbit of the spacecraft flight to the Moon. The second segment of the trajectory is a lunar orbit of spacecraft flight within the Moon sphere of influence. The last segment represents is the trajectory of the spacecraft leaving the Moon and returning to Earth along a geocentric orbit. To ensure a passive lunar flyby and subsequent return to Earth without using additional impulsive maneuvers, the parameters of each trajectory must be determined by the initial conditions. To do this the optimization problem was formulated aimed at determining the trajectory initial parameters. The cost function is the criteria for minimizing the spacecraft’s closest approach distance to the Moon and the total flight time. By varying the weight coefficients in the cost function, various trajectory configurations can be formulated. The result of the optimization problem solutions is the initial parameters of the flight trajectory to the Moon from Earth orbit were selected, ensuring the spacecraft’s entry into the Moon sphere of influence and enabling its return to Earth without impulsive maneuvers. The results show the fundamental applicability of the proposed approach to designing lunar missions using a genetic algorithm.
Текст научной статьи Построение низкоэнергетической траектории перелета Земля – Луна – Земля с применением оптимизационных процедур
Подготовка экспедиций к Луне в настоящее время является одной из задач в космической отрасли [1; 2]. В зависимости от целей миссии реализуется одна из трёх программ: посадка на Луну, выход на орбиту вокруг Луны или облёт спутника. В случае реализации последней программы и необходимости возвращения космического аппарата (КА) на Землю встает вопрос о расчете параметров траектории, обеспечивающей достижение верхней границы атмосферы Земли на терминальном участке перелёта.
Для решения задачи формирования траектории полета КА существуют различные подходы. Метод построения траектории полёта, предлагаемый в работе [3], включает в себя аналитический расчет точек траектории и численное интегрирование уравнений динамики КА. При этом полученная схема полёта предполагает выполнение трёхимпульсной коррекции. В работе [4] построение траектории полёта выполняется на основе динамической модели движения КА с использованием эфемерид Земли, Луны и Солнца, рассчитанных заранее. При этом для получения непрерывной траектории полёта КА предполагается итеративное уточнение набора параметров движения.
В существующих методах решение рассматриваемой задачи реализуется за счет формирования и решения краевой задачи с использованием численного интегрирования дифференциальных уравнений, описывающих динамику КА с учётом гравитационного воздействия небесных тел. Однако, ввиду большого количества учитываемых параметров, объем времени, требуемый для получения решения, становится достаточно большим, поэтому в данной работе предлагает- ся формировать траекторию полёта КА с использованием комбинации приближенного аналитического метода и численного метода оптимизации. Подход к решению поставленной задачи, включающий в себя вычисление параметров орбит и вектора состояния КА, а также решение оптимизационной задачи, схематично представлен на рис. 1.
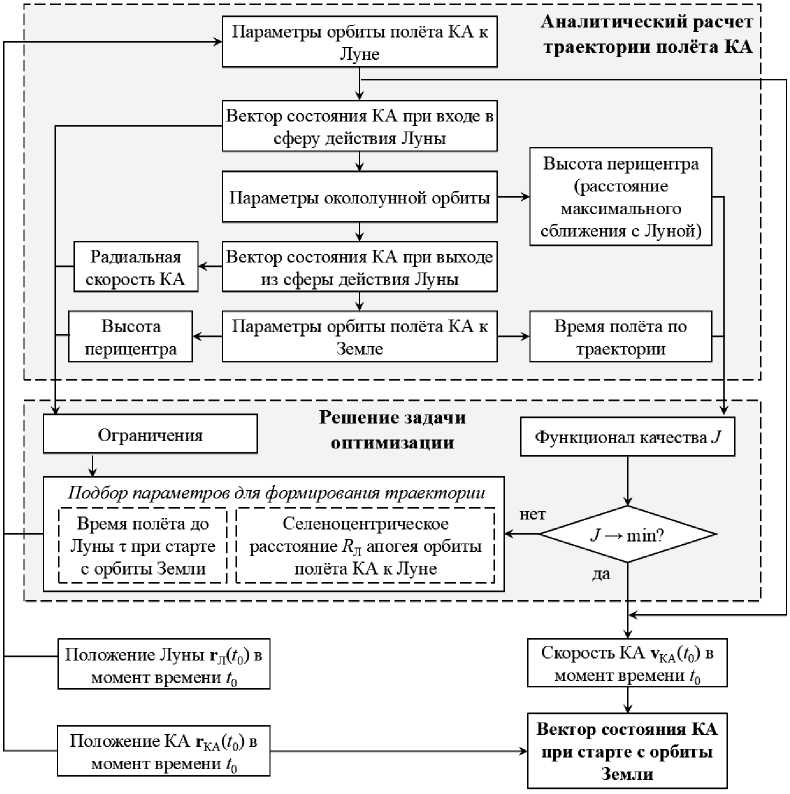
Рис. 1. Схема вычислений в предлагаемом подходе к формированию траектории полёта КА
Fig. 1. Calculation scheme in the proposed approach to forming the flight trajectory of a spacecraft
В общем случае рассматриваемая задача оптимизации является многоэкстремальной, поэтому целесообразно использовать эволюционные методы оптимизации, в частности, генетический алгоритм [5]. Генетический алгоритм активно применяется в решении оптимизационных задач авиационной и космической отраслей [6], например, для настройки контуров систем управления БПЛА [7] и стабилизации КА в режиме разгона двигателей маховиков [8], регулирования двухроторной аэродинамической системы [9], формирования программы тангажа в задаче выведения ракеты-носителя [10].
Построение схемы полёта КА
Построение орбит полёта выполняется методом сфер действия (рис. 2). Сначала определяется геоцентрическая траектория полёта к Луне, которая выводит КА из сферы действия Земли в сферу действия Луны. После этого выполняется расчет траектории полёта КА относительно Луны внутри указанной сферы. На последнем этапе определяется траектория ухода КА от Луны. Для обеспечения возвращения КА на Землю и достижения требуемой высоты перигея орбиты, по которой выполняется данный полёт, необходима импульсная корректировка траектории [11; 12].
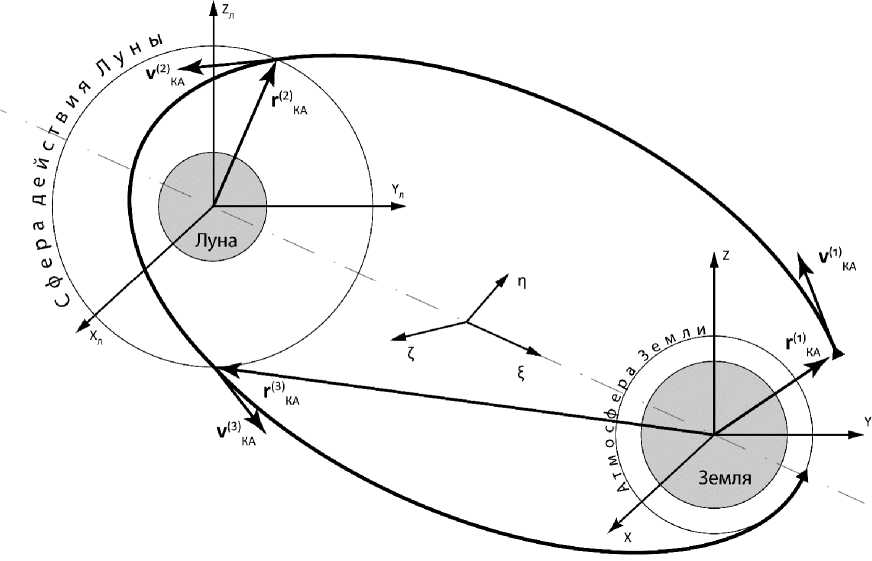
Рис. 2. Схема полёта КА
Fig. 2. Flight diagram of the spacecraft
С целью снижения энергетических затрат за выполнение перелёта Земля – Луна – Земля рассматривается пассивный полёт КА, при котором осуществляется единственный импульс скорости на орбите Земли после завершения этапа выведения. Следовательно, параметры каждого участка траектории КА, в том числе параметры орбиты, по которой выполняется полёт КА от Луны к Земле, определяются начальными условиями.
Траектория перелёта Земля – Луна – Земля делится на три участка, орбиты каждого из которых определяются в виде конических сечений [13]. Первый участок траектории представляет собой геоцентрическую орбиту полёта КА к Луне. На втором участке траектория соответствует полёту КА внутри сферы действия спутника по селеноцентрической орбите. Последний третий участок представляет собой траекторию ухода КА от Луны и возвращение на Землю по геоцентрической орбите. Далее в обозначениях, например в r К (1 А ) , верхний индекс указывает на принадлежность параметра к k -й орбите (участку), где k = 1,2,3.
Рассмотрим первый участок перелёта Земля – Луна – Земля. Определяется геоцентрическим радиусом-вектором КА r К (1 А ) в задаваемой точке старта, радиусом-вектором апогея первой орбиты г® и временем полёта до апогея т 1 - г (рис. 3). Апогей орбиты располагается на продолжении отрезка, соединяющего центры масс Земли и Луны в упрежденной точке:
r a 1) = г л ( t о +т 1 - г ) + гЛ тт +Мл R л, (1)
Г Л( t 0 +Т 1 - 1 ' )
где 1 0 - время старта КА, с; г Л ( 1 0 + Т 1 — 1 . ) - геоцентрический радиус-вектор Луны в момент времени 1 0 + Т 1 — 1 . , км; R Л - селеноцентрическое расстояние до апогея первой орбиты, км.
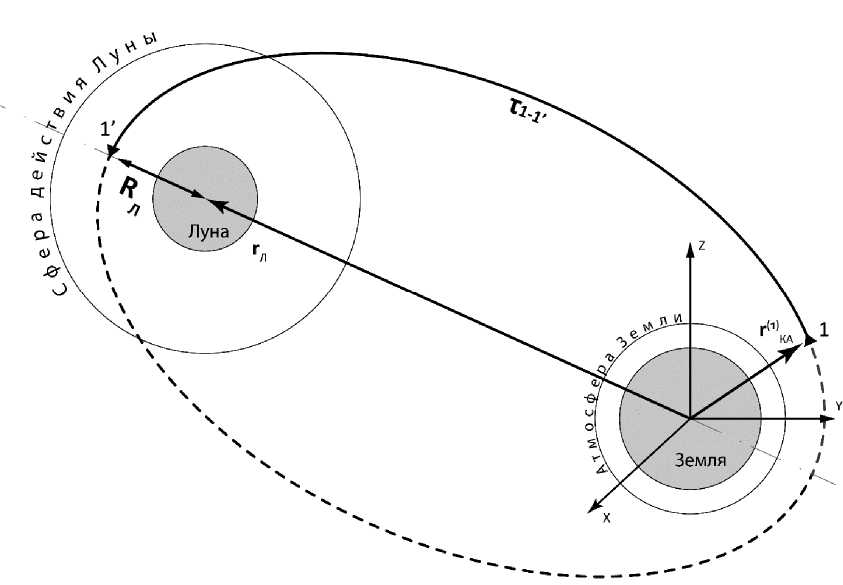
Рис. 3. Формирование орбиты полёта КА от Земли к Луне
Fig. 3. Formation of the orbit of the spacecraft flight from the Earth to the Moon
По рассчитанным гККА, г® и Т1_г затем определяются элементы первой орбиты полёта сле- дующим образом
{ e >", p '", S <“ ( 1 0 ), Я®, » '“ , , -'“ } = f ( e С V,.) ,
где e - эксцентриситет; p - фокальный параметр, км; 9 ( 1 0) - истинная аномалия КА в момент старта 1 0 , град.; Я - прямое восхождение, град.; О) - аргумент перицентра, град.; i - наклонение, град.; f ( • ) - условное обозначение процедуры вычисления указанных параметров, детальное описание которой приведено в работе [10]. Далее вычисляются истинная аномалия 3 (1’ ( t , ) КА и геоцентрический радиус-вектор до Луны г Л( t , ) в момент времени t , вхождения КА в её сферу действия.
Рассмотрим второй участок перелёта Земля – Луна – Земля. Сначала определяются селеноцентрические радиус-вектор КА r К (2 А ) и вектор скорости КА v ( К 2 А ) :
{гКА’, vKA}= f (Гл(t,).e<",Р"’. 9"’(ti),«(u,О1),i’”)•(3)
(2)(2)
По рассчитанным rКА и vКА выполняется расчет параметров второго участка полёта – се- леноцентрической орбиты полёта КА при движении в сфере действия Луны:
{e“, p<2’, 9(2’(ti), Я(2’, .о , i(2’,r,(2’} = f (г®, v£),(4)
где r n (2) - радиус перицентра орбиты, км. Затем определяются истинная аномалия Э (2) ( 1 2 ) КА и геоцентрический радиус-вектор Луны r Л ( t 2 ) в момент времени t 2 выхода из сферы действия Луны.
Рассмотрим третий участок перелёта Земля – Луна – Земля. Сначала вычисляются геоцентрический радиус-вектор КА r К (3 А ) и вектор скорости КА v ( К 3 А ) :
{ rS . v KA } = f ( e A p A ■• ( 1 2 ), a1", ®m, i1’ ) ■ (5)
На основе полученных данных выполняется расчет параметров третьего участка полёта – геоцентрической орбиты полёта КА от Луны к Земле:
{ e », p <3>, » (>) ( 1 2 ) a* «.« i ®, r?, v ®( 1 2 ) 1 3 } = f ( r», v КА ) , (6)
где v r ( t 2 ) – радиальная скорость КА в точке выхода из сферы действия Луны, км/с; t 3 – момент времени достижения перигея третьей орбиты, с.
После этого определяется общее время полёта КА в соответствии с выражением t - ~ tn -- tn .
перелёта 3 0 .
Формирование траектории с использованием оптимизационных процедур
Каждая орбита полёта КА характеризуется набором Кеплеровых элементов. Поскольку полёт КА осуществляется с использованием единственного импульса в начале перелёта, траектория полёта на втором и третьем участках определяется параметрами первой орбиты. При известной точке старта КА, для формирования первой орбиты требуется задание селеноцентрического расстояния R Л до апогея орбиты и времени полёта КА т 1 - г до указанной точки. Для построения схемы полёта вектор начальных значений задаётся в следующем виде:
x o =
R Л
т 1 - 1 '
Таким образом, для рассматриваемой задачи формирования траектории полёта КА можно сформировать задачу оптимизации, которая заключается в подборе таких начальных условий, при которых расстояние максимального сближения КА с Луной и времени полёта по траектории является минимальным, т. е.
J = ^ а 1 w 1 ( r (2) ) +а 2 w 2 A t2 a min , (9)
где Г (2) — расстояние максимального сближения с Луной, км; a i - нормировочные коэффициенты; w i – весовые коэффициенты.
Для подбираемого набора начальных параметров установлены верхние ( R max , т 1 - Г max ) и нижние ( R min , T 1 - fmin ) границы области допустимых значений:
R min * R Л * R max
1 - 1 min 1 - 1 1 - 1 max
В оптимизационную задачу дополнительно вводятся нелинейные ограничения, которые позволяют учесть необходимость вхождения КА в сферу действия Луны, направление движения КА в точке выхода из указанной сферы, которое определяется знаком радиальной скорости, и достижение КА верхней границы атмосферы Земли. Эти условия можно записать следующим образом:
f - 0
- ( R 3 + * „■ ) - 0 , (11)
|| ГКА ( t 1 ) - ГЛ ( t 1 ) 11 - R действ - 0
где vr (3) – радиальная скорость КА в точке выхода из сферы действия Луны, км/с; r π (3) – радиус перицентра третьей орбиты, км; R З – экваториальный радиус Земли, км; h атм – высота границы атмосферы, км; r КА( t 1) , r Л( t 1) – геоцентрические радиус-векторы КА и Луны в момент времени t 1 вхождения в сферу действия Луны радиуса R действ , км.
Для решения оптимизационной задачи используется генетический алгоритм. В качестве хромосом приняты селеноцентрическое расстояние R Л до апоцентра первой орбиты и время полёта τ 1 - 1 ′ КА до указанной точки при старте с орбиты Земли. Вектор, составленный из данных величин, образует особь. Набор особей формирует популяцию, участвующую в эволюции на каждой итерации генетического алгоритма. На рис. 4 представлено пространство решений функционала (9) с учётом ограничений (10) и (11). Видно, что решение оптимизационной задачи является сильно нелинейным.
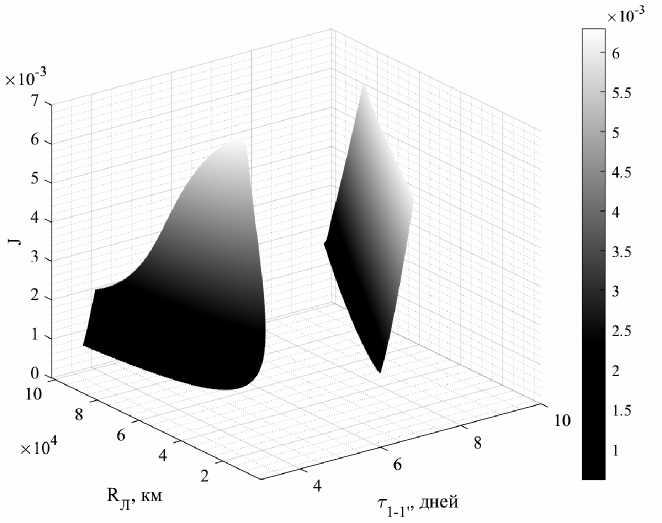
Рис. 4. Пространство решений задачи оптимизации
Fig. 4. Solution space of the optimization problem
Результаты расчета параметров траектории перелёта Земля – Луна – Земля
Для оценки корректности формирования траектории перелёта выполняется численное интегрирование дифференциальных уравнений, описывающих движение КА с учётом гравитационного воздействия Земли, Луны и Солнца. Для описания математической модели движения КА используется второй закон Ньютона, определяющий силу притяжения нескольких тел:
N
F КА =- Gm КА ∑ M i r КА r i 3 , (12)
i rКА - ri где FКА – суммарная сила, действующая на КА, кг∙км/с2; mКА – масса КА, кг; Mi – масса i-го тела Солнечной системы, кг; rКА – радиус-вектор, определяющий положение КА, км; ri – радиус-вектор, определяющий положение i-го тела Солнечной системы, км; G – гравитационная постоянная, км3/ (кг∙с2). Для численного моделирования система приводится к нормальной форме Коши.
Параметры траектории полёта
|
Параметр |
Значение |
|||
|
Селеноцентрическое расстояние R Л до апогея первой орбиты, км |
60852,67531856347 |
|||
|
Время полёта т 1_г до апогея первой орбиты, с |
497861,4404235960 |
|||
|
Элементы первой орбиты: – эксцентриситет e (1)
|
0,970233718560075 12946,40576465826 7,801256161798105 27,963990027519067 27,517114189458532 0 178,7634087547173 |
|||
|
Элементы второй орбиты: (2) – эксцентриситет e
|
8,337589049815842 550659,8331189135 187,8012561617982 329,9971957197925 152,4828858105415 –25.971322612494077 25,971322612494077 |
|||
|
Элементы третьей орбиты: – эксцентриситет e (3)
|
0,971190044826021 12558,44980487381 7,801256161798059 26,575852741837750 27,517114189458436 181,5293711525792 |
|||
|
Геоцентрический радиус-вектор КА r КА ( t 0) в точке старта, км |
' 5379,14523655473 ' 3495,17652028344 _ 1423,57950818001 _ |
|||
|
Вектор скорости КА v КА( t 0) в точке старта, км/с |
'- 6.24160075029378 ' 7.78883694322032 4.46137142580742 |
|||
|
Геоцентрический радиус-вектор Луны r Л( t 0) в точке старта, км |
Г- 312078,982157000 ' 213237,985181000 _ 132125,221950000 _ |
|||
|
Вектор скорости Луны v Л( t 0) в точке старта, км/с |
Г- 0,581440000000000 - 0,707535000000000 _- 0,324062000000000 |
' ] |
||
В таблице представлены искомые параметры R Л и τ 1 - 1 ′ , полученные в результате решения оптимизационной задачи, элементы орбит и вектора состояния КА и Луны в момент старта t 0 . Размер начальной популяции особей генетического алгоритма принят равным 500.
На рис. 5–6 изображена траектория перелёта КА, состоящая из кривых, имеющих форму конических сечений. Параметры данной траектории были подобраны с использованием описанной процедуры с применением генетического алгоритма. Дополнительно представлена траектория, полученная при численном интегрировании дифференциальных уравнений с использованием тех же начальных условий. На графиках видно, что в каждой траектории обеспечивается облёт космическим аппаратом Луны и его дальнейшее возвращение в атмосферу Земли.
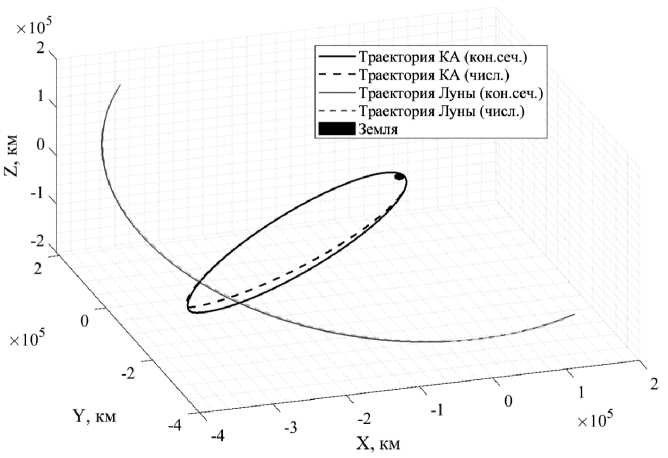
Рис. 5. Траектория перелёта КА в экваториальной системе координат
Fig. 5. Spacecraft flight trajectory in the equatorial coordinate system
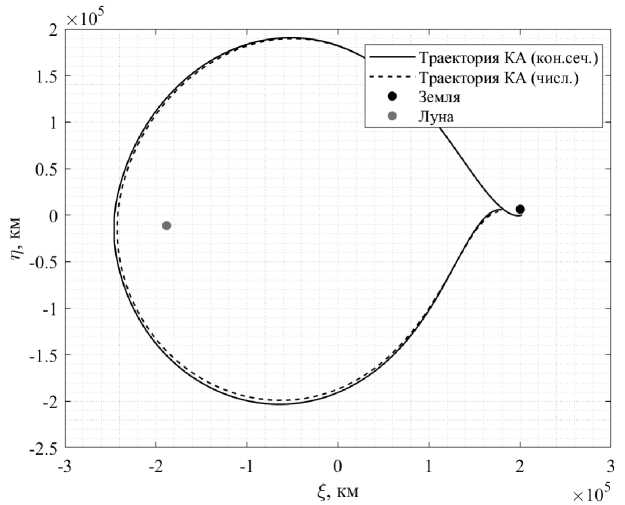
Рис. 6. Траектория перелёта КА в барицентрической системе координат
Fig. 6. Spacecraft flight trajectory in the barycentric coordinate system
Результаты, представленные в работе, подтверждают эффективность применения метода сфер действия в сочетании с оптимизационными процедурами при формировании траекторий типа Земля – Луна – Земля. Построенные схемы полёта КА показывают, что использование единственного импульса скорости на околоземной орбите является энергетически целесообразным решением, позволяющим обеспечить как облет Луны, так и последующее возвращение КА в атмосферу Земли.
Применение генетического алгоритма для решения задачи оптимизации позволило минимизировать как расстояние максимального сближения КА с Луной, так и общее время перелёта. Это демонстрирует целесообразность использования эволюционных методов оптимизации при решении задач небесной механики, характеризующихся выраженной нелинейностью и множеством локальных экстремумов [14].
Сравнительный анализ показал, что траектории, полученные методом конических сечений и с использованием численного интегрирования дифференциальных уравнений движения, практически совпадают. Данный результат свидетельствует о корректности предложенной методики формирования траекторий и подтверждает её применимость для предварительных расчетов миссий. Полученные результаты могут использоваться при предварительном проектировании миссий, аналогичных реализованным программам Apollo (NASA) или современным проектам возвращаемых миссий, обсуждаемым в рамках инициативы Artemis [15].
Заключение
В работе был выполнен расчет низкоэнергетической траектории перелета Земля – Луна – Земля с использованием комбинации метода сфер действия и генетического алгоритма. Траектория перелёта была поделена на три участка, каждый из которых представлял собой орбиту в виде конического сечения. Форма всей траектории определяется начальными условиями, в связи с этим для обеспечения облёта космическим аппаратом Луны и возвращения в атмосферу Земли необходима высокая точность при задании начальных параметров.
Для построения схемы полёта КА была сформулирована оптимизационная задача, которая численно решается с использованием генетического алгоритма. Был осуществлен подбор параметров, требуемых для формирования орбиты полёта КА к Луне при старте с орбиты Земли. Задача оптимизации сводилась к минимизации расстояния максимального сближения с Луной и времени полёта КА по траектории с учетом ограничений на условие вхождения КА в сферу действия Луны и условие, определяющее направление движения КА, что обеспечило облёт спутника и возвращение на Землю.
Было установлено, что варьирование весовых коэффициентов в функционале качества генетического алгоритма позволяет формировать различные траектории перелёта КА, в том числе и гравитационный маневр у Луны для полета к другим небесным объектам. Таким образом, можно сделать вывод, что использование оптимизационной задачи и генетического алгоритма как численного метода решения позволяет более эффективно рассчитывать траекторию полёта КА в лунных миссиях.
