Построение оптической лунной навигационной системы на базе космических аппаратов АО "НПО Лавочкина"

Автор: Багров Александр Викторович, Дмитриев Андрей Олегович, Леонов Владислав Александрович, Москатиньев Иван Владимирович, Сысоев Валентин Константинович, Ширшаков Александр Евгеньевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Инновационные технологии в аэрокосмической деятельности
Статья в выпуске: 4 (27), 2019 года.
Бесплатный доступ
Рассматривается задача создания оптической системы глобального позиционирования на Луне метровой точности, предназначенной для обслуживания ограниченного числа абонентов. Показано, что оптимальным решением задачи будет непрерывный контроль положений световых лазерных маяков на поверхности Луны с борта искусственного спутника Луны, оснащенного бортовой телекамерой, а также - с борта космического аппарата, помещенного в точки Лагранжа (L1 и L2) системы Земля - Луна. Показана возможность реализации глобальной оптической лунной навигационной связной системы на базе космических систем создаваемых в АО «НПО Лавочкина» космических проектов: обсерватории «Спектр-УФ», лунных аппаратов «Луна-25» и «Луна-26». Использование данных космических систем позволит перевести создание навигационной связной системы, как части будущей инженерной инфраструктуры освоения Луны, в реальную плоскость.
Телескоп, оптическая навигационная система, лунная база, точка лагранжа, "спектр-уф", "луна-25", "луна-26"
Короткий адрес: https://sciup.org/143172150
IDR: 143172150 | УДК: (629.78.051:535):523.3 | DOI: 10.33950/spacetech-2308-7625-2019-4-12-26
Constructing an optical lunar navigation system based on spacecraft made by Lavochkin association
The paper discusses the problem of developing an optical system for global positioning on the Moon to within one meter designed to service a limited number of users. It was demonstrated that the optimal solution of the problem would be to continuously monitor the positions of laser light beacons on the lunar surface from on-board an artificial satellite of the Moon equipped with an onboard TV camera, as well as from onboard a spacecraft placed at the L1 and L2 Lagrange points of the Earth-Moon system. The paper demonstrates the feasibility of a global lunar optical navigation and communications system based on space systems projects that are being developed at NPO Lavochkin: Spektr-UV observatory, lunar spacecraft Luna-25 and Luna-26. The use of these space systems will make it possible to start working in realistic terms on the navigation/communications system as a part of the future engineering infrastructure for lunar exploration.
Текст научной статьи Построение оптической лунной навигационной системы на базе космических аппаратов АО "НПО Лавочкина"
Проведение будущего освоения Луны, а также ее детального изучения, должно опираться на высокоточную систему позиционирования находящихся на Луне объектов, особенно луноходов и посадочных аппаратов. Системы глобального позиционирования на Земле успешно функционируют уже много лет [1], позволяя пользователям в любой момент определять свое положение с погрешностью не хуже 5 м. Вполне естественным кажется рассмотреть возможность повторения отработанной системы глобального позиционирования и на Луне. Однако, это представляется невозможным по нескольким причинам.
Во-первых, реализованные системы глобального позиционирования ( GPS , ГЛОНАСС, Galileo ) опираются на работу многочисленной группировки спутников, чтобы в любой момент времени у любого наземного пользователя системы была возможность уверенно принимать сигналы как минимум от четырех навигационных спутников. По принимаемому со спутника сигналу наземный приемник вычисляет дальность до каждого спутника, и по известному пространственному положению спутников определяет свое пространственное положение [1].
В том случае, когда система глобального позиционирования рассчитана на массового потребителя, ее существование экономически оправдано стоимостью измерения координат одного приемника, которая существенно ниже стоимости (при равной точности) определения тех же координат другими способами, например, астрономическими. На Луне потенциальное число позиционируемых объектов в ближайшее десятилетие не превысит несколько единиц. В этом случае стоимость проведения координатных измерений одного объекта возрастает до недопустимой величины.
Во-вторых, наземные системы глобального позиционирования не могут существовать без наземной координатной поддержки. Орбита каждого навигационного спутника должна быть точно известна, а всякие изменения ее параметров — отслежены. На Земле существует несколько сотен станций наземной поддержки систем глобального позиционирования, тогда как на Луне их нет, и в обозримом времени не предвидится.
В-третьих, космическая техника рассчитана на сравнительно недолгий срок безотказной работы — на 10–15 лет. Это значит, что группировка спутников системы глобального позиционирования должна постоянно обновляться (и резервироваться). Получается парадоксальное положение, когда для позиционирования нескольких аппаратов на Луне требуется многочисленная группировка искусственных спутников Луны (ИСЛ) навигационного назначения.
В работе [2] детально анализируется необходимое количество космических аппаратов (КА) для создания радиотехнической лунной навигационной системы и показано, что для этого необходимо до 18 лунных навигационных спутников.
Поэтому актуально разработать лунную навигационную связную систему (ЛНСС) на новых принципах, которые позволяют поэтапно ее реализовать — от локальной системы (для отдельного района Луны) до глобальной (по всей поверхности Луны). Мы считаем, что такую систему можно создать на основе средств оптико-электронных космических систем наблюдения и световых лазерных маяков, расположенных на поверхности Луны.
Прежде всего, определимся с необходимой точностью лунной навигационной системы. Структурирование таких объектов показывает, что вершиной планов по освоению Луны является строительство лунных баз, в которых можно выделить три класса объектов, для которых необходимы определенные точности, что отражено в таблице.
Необходимые точности для лунной навигации
Тип объекта
Космический аппарат в режиме подготовки к посадке

Луноход

Посадочная станция

Навигационная точность
По координатам — 100 м
По скорости — 1 м/с
По координатам — 10 м
По скорости — 0,5 м/с
По координатам — 10 м
Для эффективного решения задачи создания лунной навигационной системы с необходимыми параметрами необходимо решить следующие проблемы:
-
• создание высокоточной селенодезической системы координат (путем фиксации каркаса селенодезической системы координат на опорных световых лазерных маяках на теле Луны и развертывания систем их наблюдения с КА) и последующее совмещение ее со снимками картографирования поверхности Луны КА LRO [3];
-
• использование окололунного полярного низкоорбитального КА с оптикоэлектронной системой наблюдения, позволяющей наблюдать как объекты позиционирования, так и опорные лазерные маяки на поверхности Луны. Такая система позволяет измерять с погрешностью 1…10 м селенографические координаты всех объектов с интервалом не реже, чем раз в две недели;
-
• заключительным этапом развития такой системы, для гарантированного позиционирования аппаратов на поверхности Луны в непрерывном режиме, является размещение КА с оптическими приборами в точках Лагранжа L 1 и L 2, что позволит обеспечить глобальную координатно-временную привязку объектов на обоих полушариях Луны. Это позволит измерять координаты объектов на поверхности Луны с погрешностью (в зависимости от типа оптико-электронных приборов на борту КА в точке либрации) от 200 до 1 м (рис. 1) [4, 5].
Очевидным достоинством такой системы является ее поэтапное построение с практическим использованием результатов каждого этапа.
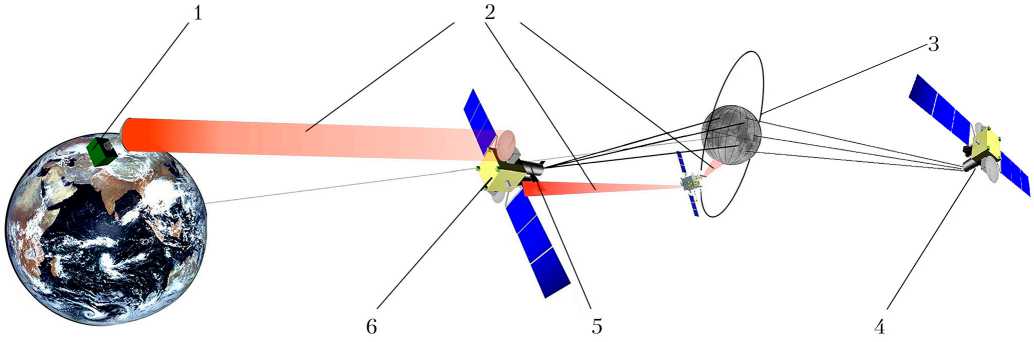
Рис. 1. Схема глобальной навигационной связной системы на Луне: 1 — пункт управления, стандарт времени; 2 — радиоканал; 3 — полярная низкая орбита; 4 — точка Лагранжа L2; 5 — импульсный лазер, оптический интерферометр, оптический телескоп; 6 — точка Лагранжа L1
Этап 1 — расположение на поверхности Луны посадочной станции со световым лазерным маяком, что будет первым координатным селенодезическим знаком практически точечных размеров, который можно будет наблюдать из космического пространства. Создание такого реперного знака будет эквивалентно созданию точки отсчета, от которой можно будет измерять относительные селенодезические координаты объектов с самой высокой точностью, что сделает его аналогом Гринвичской обсерватории на Луне.
Этап 2 — использование полярного орбитального КА с телевизионным комплексом для проведения астрометрических измерений положения светового лазерного маяка, что позволит зафиксировать систему селенографических координат на теле Луны, а в результате совмещения ее с картой высот, полученной LRO , построить селенодезическую систему координат.
Этап 3 — оснащение позиционируемых объектов на Луне световыми маяками, что позволит с помощью ТВ-комплекса низкоорбитального лунного аппарата наблюдать этот объект относительно опорного светового лазерного маяка и определять его координаты с высокой точностью (~1–10 м). Для достижения высокой точности позиционирования будет необходимо применение измерительной аппаратуры на низкой окололунной орбите, с которой отдельный позиционируемый объект может наблюдаться с некоторой временной задержкой, т. е. не на каждом витке.
Этап 4 — размещение КА с измерительной угломерной аппаратурой в точках Лагранжа позволит непрерывно наблюдать как исследовательские аппараты, так и опорные световые лазерные маяки, а также проводить позиционирование оснащенных световыми лазерными маяками объектов на Луне с высокими оперативностью и точностью.
Конечно, построение такой системы зависит от планов по освоению Луны. Совершенно очевидно, что ее построение с целью экономии средств должно основываться на максимальном использовании уже имеющихся наработок в создании космических систем [5], поэтому в данной статье рассматривается возможность реализации такой системы на основе КА, разработанных АО «НПО Лавочкина».
Посадочный аппарат
Посадочный аппарат «Луна-25» будет оснащен световыми лазерными маяками для решения служебной задачи — точного определения точки посадки КА в широких пределах области посадки, определенной баллистическим прогнозом. Поскольку даже с низкой окололунной орбиты линейный размер КА «Луна-25» не позволит его обнаружить на снимках лунной поверхности, использование светового лазерного маяка высокой яркости на борту спускаемого КА является необходимым условием решения служебной задачи.
Полярный орбитальный аппарат
В составе аппаратов, входящих в ЛНСС, целесообразно использовать имеющиеся КА. АО «НПО Лавочкина» располагает широким спектром аппаратов и платформ для разнообразных задач, и, как показывает проведенный экспертный анализ, они могут использоваться для создания оптической глобальной ЛНСС. Рассмотрим детально КА для ЛНСС. В качестве полярного аппарата идеальным решением будет КА, аналогичный «Луна-26», так как он удовлетворяет всем требованиям, представленным в прошлом разделе. Данный аппарат представлен в общем виде на рис. 2 [6].
Полярный орбитальный аппарат «Луна-26» представляет собой кубический корпус с двухбаковой двигательной установкой с вертикальной компоновкой баков. Корпус КА выполнен в виде четырехгранной призмы с диаметром описанной окружности по узлам крепления 2 450 мм. Он состоит из силового каркаса, повторяющего контур призмы, и трехслойных сотопанелей с тепловыми трубами, установленными на боковых гранях призмы, являющимися элементами системы терморегулирования. Снаружи корпуса установлены панели солнечных батарей, антенны и другое оборудование. Масса КА «Луна-26» составляет 1 100 кг в незаправленном состоянии (2 200 кг — в заправленном), энергопотребление 1 200 Вт.
Лунная стереотопографическая телевизионная камера (ЛСТК) является составной частью комплекса научной аппаратуры полярного орбитального аппарата ЛНСС.
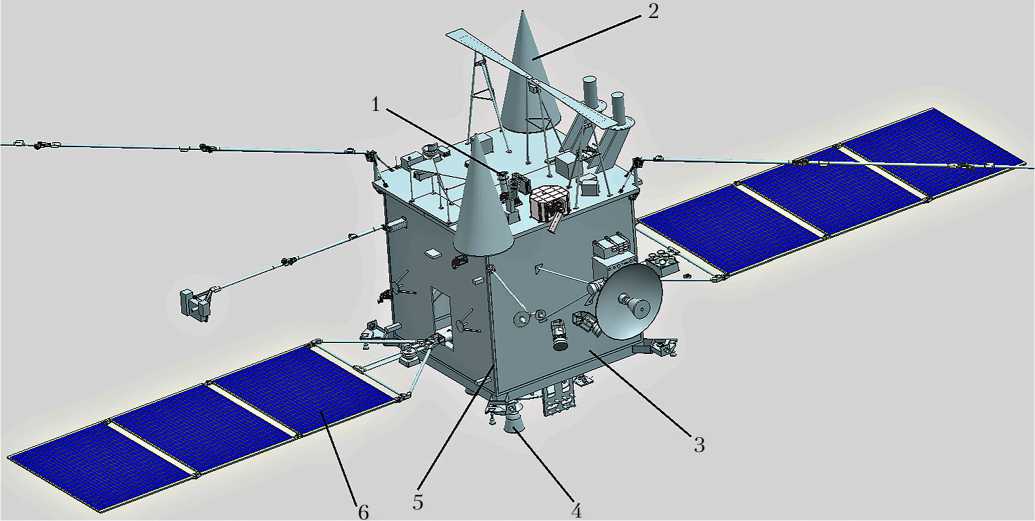
Рис. 2. Общий вид полярного орбитального аппарата: 1 — стереотопографическая телевизионная камера; 2 — антенны; 3 — сотопанели с тепловыми трубами; 4 — двигательная установка; 5 — корпус; 6 — солнечные батареи
В штатной работе ЛСТК будет вести панорамную стереосъемку лунной поверхности, освещенной солнцем. Мощность излучателя светового лазерного маяка может быть выбрана достаточной, чтобы на снимках ЛСТК при любом уровне освещенности лунной поверхности солнечным светом сигнал от светового лазерного маяка превышал яркость подстилающей поверхности.
Основная служебная задача по локализации места посадки на местности будет решена при получении первого снимка области посадки с регистрацией светового излучения лазерного маяка. Однако, бортовое оснащение ИСЛ, включающее телекамеру высокого разрешения, службу времени, звездные датчики ориентации и бортовой вычислительный комплекс, представляет собой совокупность устройств, способных полноценно решать (помимо штатных научных задач) задачи создания и поддержания каркаса высокоточных селенодезических координат.
В результате проведения миссии «Луна-25» и последующих экспедиций с посадками на Луну на поверхности Луны будут установлены точечные геодезические реперы. Благодаря этим реперам установленный на них каркас селенодезических координат будет жестко связан с телом Луны, а активный характер этих реперов позволит наблюдать их с большого расстояния — практически из всего окололунного пространства. Тем самым, система световых лазерных маяков станет надежной основой ЛНСС [7].
Инновационный подход АО «НПО Лавочкина» к решению задач ЛНСС заключается в отказе от проведения астрономических наблюдений с поверхности Луны и в проведении угломерных измерений топоцентрических положений навигационных звезд на борту ИСЛ, при которых индикатором точки проведения измерений является световой лазерный маяк.
Измерителями углов на борту ИСЛ будут бортовая телевизионная камера и бортовые звездные датчики (БЗД) системы ориентации. Все три измерительных устройства жестко зафиксированы на конструктиве ИСЛ, так что по данным БЗД можно вычислить мгновенное направление оси визирования телекамеры и ориентацию ее поля зрения в системе экваториальных небесных координат. Точное положение любого объекта в поле зрения телекамеры несложно вычислить, если известны фокусное расстояние объектива камеры и линейные характеристики матричного приемника камеры.
Для решения служебных задач координатного позиционирования маяка ЛСТК должна измерять угловое расположение точечного изображения светового лазерного маяка относительно центра поля зрения камеры. По данным БЗД будут вычисляться направление на центр поля зрения ЛСТК в системе небесных координат в каждый момент времени и расположение проекции маяка на небесную сферу. Погрешность этих измерений определяется угловой разрешающей способностью телекамеры (в случае ЛСТК она составляет 6 угловых секунд). С высоты измерений 200 км эта погрешность обеспечит погрешность позиционирования световых лазерных маяков на уровне 6 м [8–10].
При работе искуственного спутника Луны на более низкой орбите с высотой 100 км погрешность разового позиционирования повысится до 3 м.
Для модернизации космического аппарата «Луна-26» в навигационный спутник необходимо:
-
• расширение системы связи — радиоканал теперь нужен не только для связи с посадочными аппаратами и наземными станциями, но и для передачи / приема данных с аппаратов в точках Лагранжа;
-
• необходимо увеличить сроки службы аппарата до 10 лет;
-
• установить лазерный высотомер. Применяемые для исследования с КА планет и их спутников однолучевые лазерные альтиметры-профилометры (АО «ГОИ им. С.И. Вавилова») проводят одновременное измерение дальностей по нескольким направлениям, что позволит увеличить точность привязки координат на первом этапе построения селенодезической системы координат [11].
Таким образом, за счет частичного сокращения комплекса научной аппаратуры удастся получить 160 кг массы и 100 Вт энергии, которые будут использоваться при модернизации.
Из рис. 3 видно, что большая часть систем КА «Луна-26» будет использована для полярного спутника ЛНСС без изменений, часть требует адаптаций под задачи ЛНСС и увеличения срока службы (за счет дублирования и троирования ключевых узлов систем), добавлены дополнительный радиоканал и высотомер. Лазерный высотомер на борту полярного ИСЛ в составе ЛНСС является вариантом вспомогательного инструмента, предназначенного для полного самоопределения его орбиты.
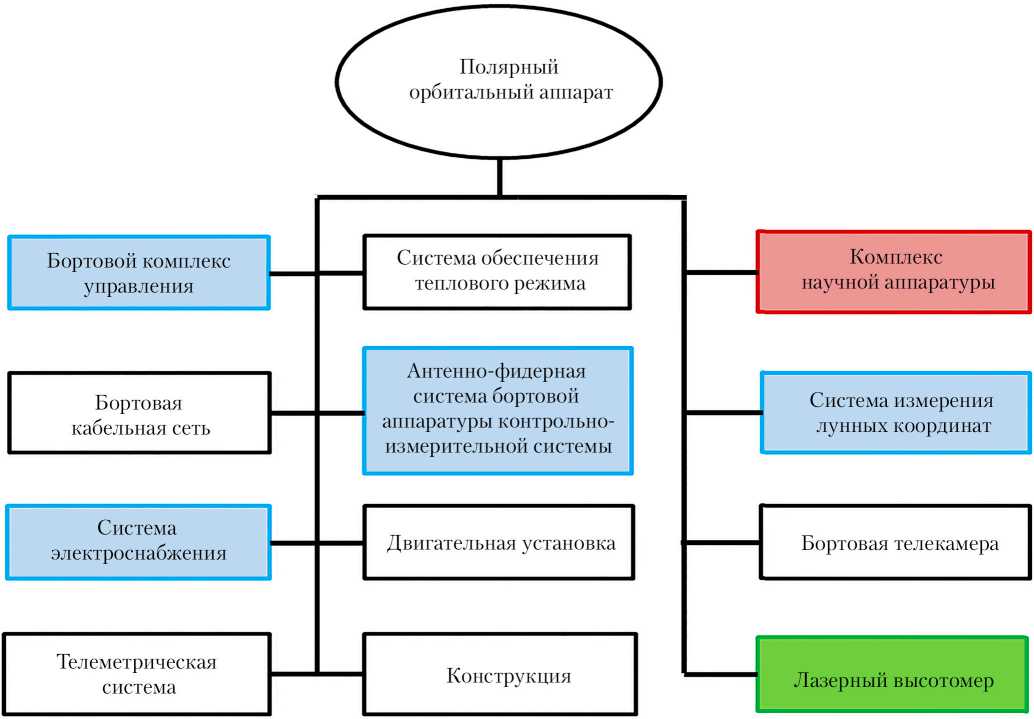
Рис. 3. Схема деления полярного навигационного связного орбитального аппарата на основе КА «Луна-26»:
■ — узлы, требующие доработки; ■ — частично или полностью удаленные узлы; ■ — добавленные узлы
Точные значения диапазона измеряемых дальностей должны быть определены в результате специального рассмотрения наиболее эффективного способа контроля орбиты навигационного ИСЛ. Возможно, более перспективным вариантом окажется совмещение оптического и радиомаяка в реперных точках и добавление на борт ИСЛ аппаратуры по схеме DORIS для самоконтроля орбиты.
Важным элементом навигационной системы на низкой полярной окололунной орбите будет установка на борту КА лазерного прожектора, входящего в состав служебной аппаратуры, которым может быть подсвечена область лунной поверхности, находящейся в поле зрения ЛСТК. Прожектор должен включаться только в моменты пролета КА «Луна-26» над местами расположения имеющихся на Луне ретрорефлекторов, используемых для лазерной локации Луны с Земли. Отраженный от ретрорефлекторов свет будет индицировать на снимках еще пять малоразмерных селенодезических реперов на поверхности Луны, что существенно повысит точность работы ЛНСС.
Аппарат в точке Лагранжа
Для получения глобальной навигационной связной системы необходимо размещение КА с оптико-электронной аппаратурой наблюдения поверхности Луны в точке Лагранжа системы Земля– Луна. Так как расстояние от Луны до точки Лагранжа L 1 достаточно велико (65 000 км), то необходимо размещение в этой точке КА с большим телескопом, чтобы обеспечить необходимое разрешение на поверхности Луны.
Основой для КА в точках Лагранжа может быть аппарат «Спектр-УФ», разрабатываемый АО «НПО Лавочкина» уже в течение нескольких десятков лет, представляющий собой базовый модуль служебных систем «Навигатор» с телескопом Т-170М [12], показанный на рис. 4.
Прецизионный крупногабаритный телескоп Т-170М построен на отражательной оптике с фокусным расстоянием 17 м и главным зеркалом ∅1,7 м.
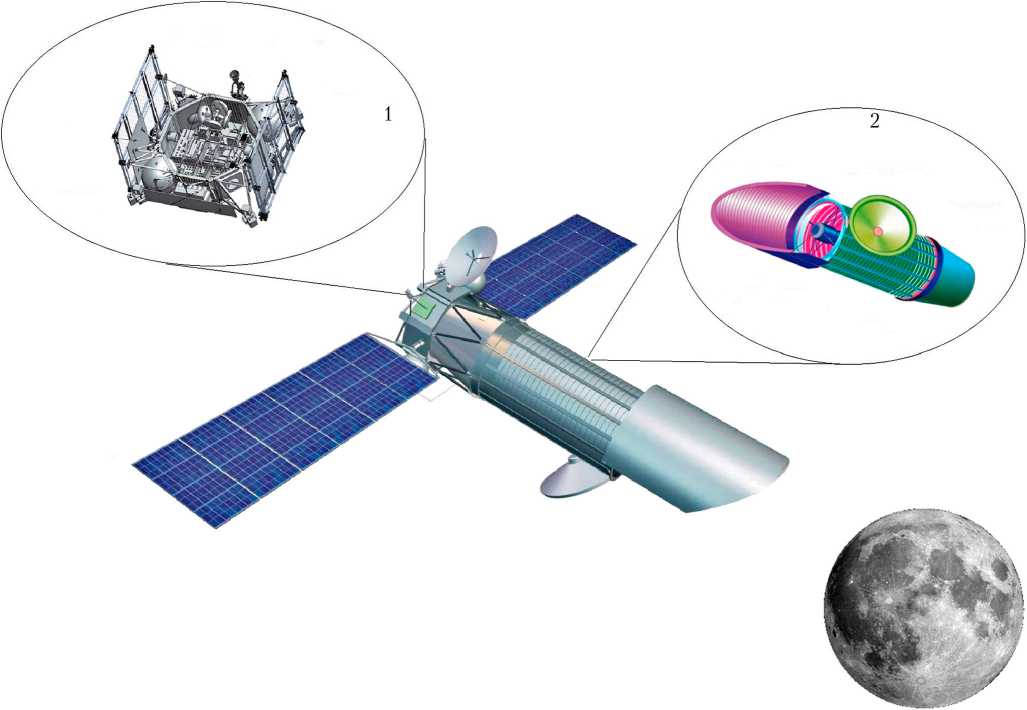
Рис. 4. Общий вид космического аппарата в точке Лагранжа: 1 — базовый модуль служебных систем «Навигатор»; 2 — телескоп Т-170М
Телескоп Т-170М построен по классической схеме Ричи – Кретьена. Оптическая система телескопа формирует изображения объектов в фокальной поверхности с полем зрения 30 угловых минут. Излучение от объекта (космического), попадающее на апертуру телескопа, после отражения от главного и вторичного зеркал проходит через отверстие в главном зеркале и попадает в зону инструментального отсека телескопа. В инструментальном отсеке расположены основные научные приборы: блок спектрографов и блок камер поля, а также служебная система датчиков гида, предназначенная для решения задач управления и контроля, т. е. наведения и стабилизации телескопа на выбранный объект. Система датчиков гида может быть также использована и для решения некоторых научных задач [12].
Основные характеристики космического аппарата «Спектр-УФ»: время активного существования не менее 5 лет;
масса КА (с топливом) 2 900 кг; масса полезной нагрузки 1 625,5 кг; габаритные размеры:
– рабочее положение 9 670x13 650x4 850 мм; – транспортное положение 8 127x2 983x2 983 мм; потребляемая мощность до 1 900 Вт; скорость передачи научных данных до 4 мбит/c; система ориентации трехосная.
Дополнительным плюсом использования доработанного аппарата «Спектр-УФ» в качестве аппарата в точке Лагранжа является его многофункциональность. Вполне вероятно, что наблюдение за объектом исследования на поверхности Луны будет сессионным, и часть времени КА в точке Лагранжа будет находиться в режиме ожидания. Использование астрономического телескопа позволит нагрузить аппарат дополнительными задачами. В перерывах между навигационными наблюдениями КА в точке Лагранжа способен вести астрофизические исследования (рис. 5).
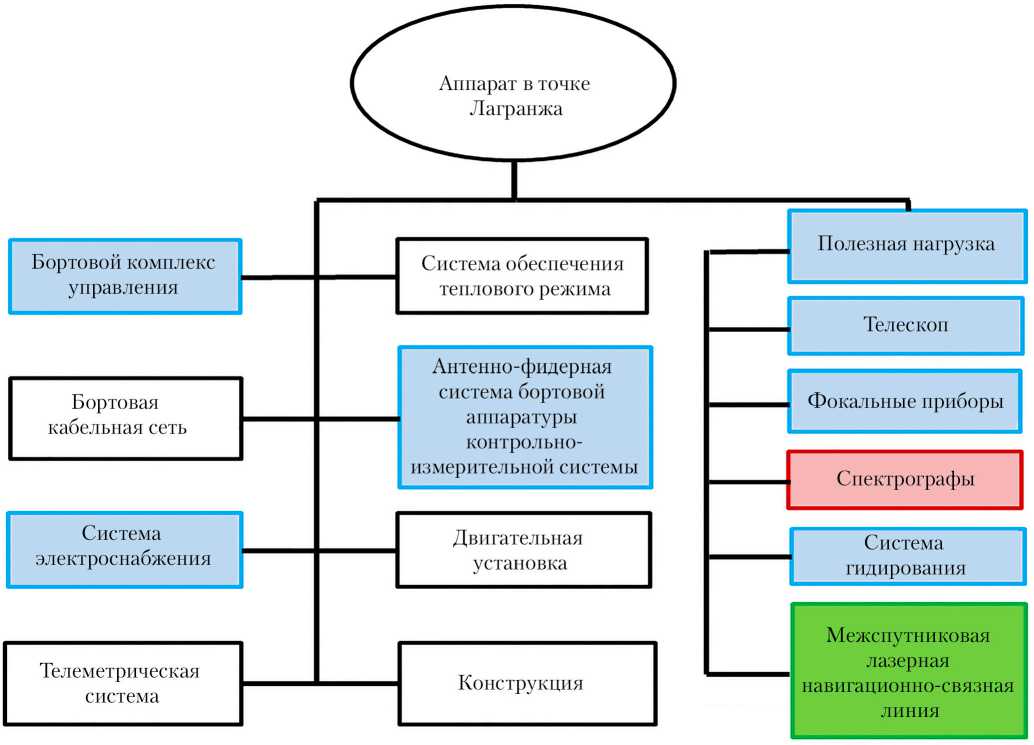
Рис. 5. Схема деления навигационного связного аппарата в точке Лагранжа на основе КА «Спектр-УФ»: ■ — узлы, требующие доработки; ■ — частично или полностью удаленные узлы; ■ — добавленные узлы
Модернизация КА «Спектр-УФ» будет заключаться в следующем:
-
• в части служебных систем необходимо дополнение радиоканалом для связи с полярным орбитальным аппаратом и маяками;
-
• увеличение срока службы до 10 лет;
-
• возможное уменьшение массы главного зеркала (за счет использования других материалов и уменьшения толщины зеркала);
-
• изменение фокальных приборов для совмещения спектрального диапазона со световыми лазерными маяками на Луне, в частности, изменение диапазона камер поля и ПЗС–матриц на видимый. Спектральный диапазон телескопа Т-170М покрывает также и весь видимый диапазон до 0,8 мкм, поэтому замена напыления на зеркалах не требуется. Качество рабочей поверхности зеркала, рассчитанного на работу в ультрафиолетовом диапазоне, существенно превышает требования к качеству оптики для работы в видимом диапазоне;
-
• опциональное использование спектрографов (для сугубо навигационных задач установка их не является обязательной, но если наш аппарат потребуется также для решения астрофизических задач, они необходимы);
-
• использование системы точного гидирования для наведения телескопа на исследуемую область Луны.
Стоит отметить, что модернизация систем разработанных аппаратов представляет собой, по большей части, упрощение инструментов «Спектр-УФ», что приведет к уменьшению массы и энергопотребления КА (в частности, только исключение спектрографов даст 300 кг массы и 200 Вт энергии). Из рис. 5 видно, что большая часть систем КА «Спектр-УФ» подходит для спутника в точке Лагранжа ЛНСС без изменений, часть требует адаптаций под задачи ЛНСС и увеличения срока службы (за счет дублирования и троирования ключевых узлов систем), облегчен телескоп, частично сокращен комплекс научной аппаратуры. При необходимости может быть добавлена межспутниковая лазерная навигационная связная линия.
Вполне вероятно, что для задач на лунной поверхности (по крайней мере, на начальных этапах освоения) будет нужна навигация не всей поверхности Луны, а только определенной области, в которой ведутся работы. Угол зрения 0,5° обеспечивает контроль над областью 0580 км, с угловым разрешением 0,08 и линейным разрешением 25 м, чего достаточно для управления постройкой лунной базы или сети баз (рис. 6). Применительно к задачам ЛНСС это означает, что погрешность разового (мгновенного) позиционирования за время экспозиции 40 мс составит 25 м, но после накопления 100 измерений среднеквадратичное отклонение уменьшится в 10 раз, и погрешность позиционирования через 4 с измерений вырастет до 2,5 м.
Поверхностный сегмент лунной навигационной связной системы
Рассмотрим концепцию построения поверхностного сегмента ЛНСС. Данная система является новым объектом для космической системы — ранее она не использовалась. Хотя, как таковые, лазерные диоды, предлагаемые в качестве световых маяков в составе ЛНСС, уже используются в космических системах, например, для лазерной связи [13].
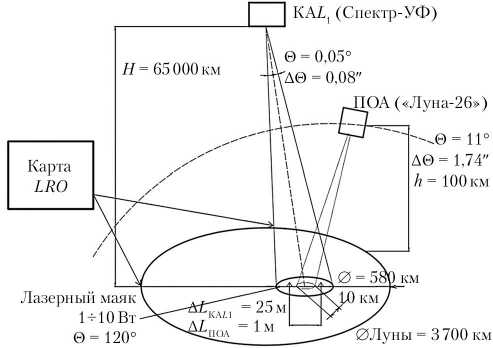
Рис. 6. Cхема измерения с оптических приборов, размещенных на полярном аппарате (ПОА) и аппарате в точке Лагранжа
Новизна нашего подхода заключается в отказе от проведения угломерных измерений в точке позиционирования известными астрономическими методами в пользу проведения этих измерений на борту находящегося в космосе аппарата. При этом индикатором точного положения позиционируемого объекта является световой маяк с точечными размерами его тела свечения. Преимуществом предлагаемого нами метода является возможность наблюдения селенодезического репера на большом расстоянии, включая окололунное космическое пространство, что обеспечит использование лунных реперов для навигации аппаратов в космосе.
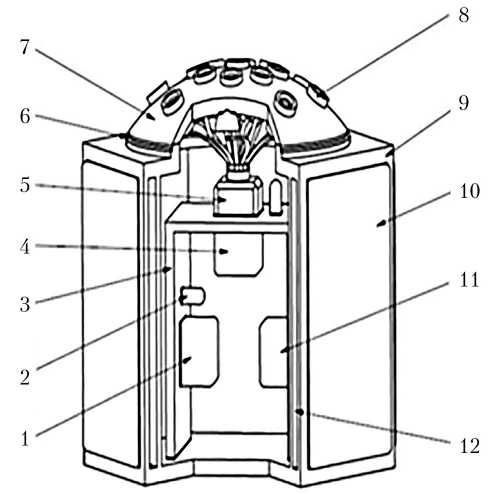
Световые лазерные маяки (рис. 7), которые можно использовать на характерных для космических полетов больших расстояниях, должны иметь высокую светимость при минимальных размерах светящегося тела. Этому условию соответствуют разработанные в конце XX в. полупроводниковые излучатели света с высокой светоотдачей. У этих приборов — очень большие перспективы для космической техники, хотя до сих пор в космических системах для лазерной локации и лазерной связи используются лазерные диоды [12].
а)
б)
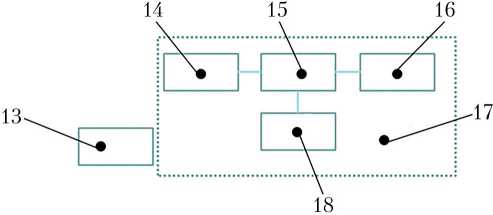
Рис. 7. Световой лазерный маяк: а — компоновочная схема автономного оптического маяка с использованием лазерных диодов: 1 — акселерометр; 2 — термодатчики; 3 — плата; 4 — аккумулятор; 5 — процессор; 6 — антенна; 7 — крышка; 8 — лазерные диоды; 9 — корпус; 10 — фотобатареи; 11 — радиопередатчик; 12 — мат ЭВТИ; б — состав автономного светового лазерного маяка: 13 — уголковые отражатели (ретрорефлекторы); 14 — оптическая схема световых лазерных излучателей; 15 — блок управления с датчиками; 16 — система энергопитания; 17 — конструкция; 18 — радиоприемная система
Состав поверхностного сегмента лунной навигационной системы состоит из двух типов световых лазерных маяков:
-
• «опорных», которые служат неподвижными реперными точками для построения селенодезических систем координат;
-
• «динамических», которые устанавливаются на исследовательские поса-
- дочные станции, включая луноходы, и которые являются индикаторами позиционируемых объектов.
Посадочный аппарат «Луна-25» включает в себя служебную систему из двух оптических маяков, предназначенных для точной локализации места посадки аппарата [14]. Планируемые области посадки КА «Луна-25» выбраны на ровных участках больших кратеров.
В рамках работ по созданию ЛНСС планируется создание автономных световых лазерных маяков.
Оптическая система световых лазерных излучателей может быть выполнена в двух вариантах:
-
• в виде набора лазерных излучателей с небольшими углами излучения с общим углом ~100-180°. Циклограм -ма включения таких излучателей будет определяться алгоритмом управления всем маяком;
-
• в виде одного лазерного излучателя. В этом случае планируется узкое излучение данного лазера, которое сканируется в пределах 100-180°.
Характеристики автономных световых маяков:
облученность, создаваемая на расстоянии в пределах сектора облучения:
для 64 000 км не менее
2,3×10–15 Вт/ м2;
для 200 км не менее
0,6×10–9 Вт/м2; угол сектора облучения:
для 64 000 км не менее 5°;
для 200 км не менее 25°;
длина волны лазерного излучения 0,4–1,2 мкм;
способ включения путем подачи питания от аккумулятора на блок управления системой световых маяков; режим излучения непрерывный;
продолжительность работы 100±10 с
(с паузой между включениями ≥ 2 ч);
масса 1 кг;
пиковая электрическая мощность, потребляемая излучателем светового маяка совместно с блоком управления системой световых маяков
Система управления должна обеспечивать:
-
• самодиагностику;
-
• получение от радиоприемной системы команды на включение излучателя;
-
• управление пространственно-модуляционными характеристиками лазерного излучения.
Система энергопитания данного маяка рассматривается в трех вариантах:
-
• солнечные фотопреобразователи плюс аккумуляторы;
-
• радиоизотопные генераторы плюс аккумуляторы;
-
• экзотический вариант — термоэлектрический генератор плюс аккумуляторы (вариант актуален при создании маяка на основе внедряемого пенетратора).
Алгоритм функционирования ЛНСС с автономными маяками может быть представлен в двух вариантах:
-
1. Локальная навигационная система «полярный КА». В данной системе предполагается следующее:
-
• с борта КА подается радиокоманда на включение световых лазерных маяков (время включения определяется бортовыми системами по орбитальным характеристикам);
-
• ТВ-комплекс фиксирует световое излучение маяков и/или обрабатывает эту информацию в бортовом блоке управления и передает ее по радиоканалу на Землю в очередном сеансе связи;
-
• при необходимости он передает ее по запросу с Луны на Луну (например, находящимся там людям).
-
2. Глобальная навигационная система «КА в точке Лагранжа L 1 ».
В данном случае:
-
• с «КА в точке L 1» передается радиокоманда на включение световых лазерных маяков как на опорных, так и на исследовательских станциях (например, на луноходах). Время подачи радиокоманды на включение будет определяться:
-
– по диаграмме работы;
-
– по команде с Земли;
-
– по команде с Луны;
-
• радиоинформация об излучении маяков с телескопа КА L 1 после обработки и привязки ее к орбитальным
не более 30 Вт. такого маяка
параметрам КА и селенодезической системы координат будет передаваться как на Землю по радиоканалу, так и потребителям на Луне.
Для обеспечения гарантированной видимости излучения установленных на Луне световых лазерных маяков наземными телескопами диаметром от 1 м световой поток должен иметь расходимость ~5° и оптическую мощность ~2 Вт в этом телесном угле. Такие характеристики могут обеспечить лазерные диоды.
В случае использования лазерных диодов в качестве источника оптического излучения можно добиться высокой надежности оптического лазерного маяка. Это возможно осуществить за счет установки в крышку оптического маяка некоторого числа лазерных диодов, соединенных с управляющим драйвером. При выходе из строя одного лазерного диода маяк не перестает полностью функционировать, тем самым увеличивается его надежность.
На рис. 7, а показана компоновочная схема автономного оптического маяка с использованием лазерных диодов в качестве источника излучения.
В состав автономного светового лазерного маяка входят следующие компоненты:
-
• корпус, сделанный из углепластика, необходимый для защиты всей конструкции;
-
• экранно-вакуумная теплоизоляция, обеспечивающая теплоизоляцию оптического маяка;
-
• фотобатареи, представляющие собой пластины арсенида галлия, расположенные на внешней поверхности корпуса оптического маяка, используемые для накопления в аккумуляторах энергии, необходимой для работоспособности маяка;
-
• крышка корпуса, в которой закреплены лазерные диоды, и которая является также их защитой;
-
• антенна, в виде кольца расположенная на внешней части крышки корпуса, необходимая для управления режимом работы оптического маяка по радиоканалу с окололунного КА;
-
• плата, на которой располагаются все основные компоненты управления и связи;
-
• аккумулятор литий-ионного типа, используемый в качестве источника энергии;
-
• процессор, представляющий собой управляющий драйвер, необходимый для программного управления лазерными диодами;
-
• лазерные диоды, выступающие в качестве источника света;
-
• акселерометр, расположенный на плате, выполняющий функцию инерциального датчика положения;
-
• радиоприемник, который совместно с антенной служит средством связи маяка с окололунным КА;
-
• термодатчики, располагаемые на плате рядом с процессором, аккумулятором, акселерометром для контроля температуры этих рабочих элементов, а также — на внутренней поверхности корпуса для контроля за температурой внутри прибора в целом.
В качестве источника энергии выбран литий-ионный аккумулятор, так как он обладает рядом преимуществ перед другими типами (высокая энергетическая плотность, низкий саморазряд, отсутствие эффекта памяти и необходимости какого-либо обслуживания).
Для накопления энергии в аккумуляторах выбраны фотобатареи на основе арсенида галлия. Они имеют ряд преимуществ, таких как высокий коэффициент фотопреобразования (~25%), высокая радиационная стойкость. Вместе с аккумулятором фотобатареи образуют системы энергоснабжения светового лазерного маяка.
Используя 17 лазерных диодов c углом расходимости светового пучка 5°, расположенных по принципу наибольшего перекрытия облучаемой поверхности, достигаем значения ~150° телесного угла. Это позволяет нам с наибольшей вероятностью определить местоположение светового лазерного маяка и его ориентацию, а в дальнейшем программно включать только тот лазерный диод, свет которого направлен в сторону ведущего наблюдения наземного телескопа. И, конечно, в состав маяка должен входить уголковый отражатель.
Заключение
АО «НПО Лавочкина» уже 50 лет является основным разработчиком космических аппаратов, предназначенных для исследований Луны и других тел Солнечной системы [15]. Накопленный опыт позволил предложить оптимальное решение задач ЛНСС, которое полностью удовлетворяет текущим и перспективным задачам налунной и окололунной навигации. Оно основано на размещении на поверхности Луны системы селенодезических реперов и выносе всей измерительной аппаратуры в окружающее Луну космическое пространство, а конкретно — на орбиту Луны в точку Лагранжа Луна–Земля. В качестве реперов предложено использовать автономные световые лазерные маяки. Использование имеющихся аппаратов с некоторыми доработками значительно сократит время на реализацию подобной системы и экономические затраты.
Список литературы Построение оптической лунной навигационной системы на базе космических аппаратов АО "НПО Лавочкина"
- ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. 4-е изд., перераб., доп. М.: Радиотехника, 2010. 800 с.
- Гордиенко Е.С., Ивашкин В.В., Симонов А.В. Анализ устойчивости орбит искусственных спутников Луны и выбор конфигурации лунной навигационной спутниковой системы // Вестник НПО им. С.А. Лавочкина. 2016. № 4. С. 40-54.
- Smith D.E., Zuber M.T., Neumann G.A., Mazarico E., Head III J.W., Torrence M.H. Results from the Lunar Orbiter Laser Altimeter (LOLA): global, high-resolution topographic mapping of the Moon // Lunar and Planetary Science Conference XLII, 2011, Abstract 2350.
- Багров А.В., Дмитриев А.О., Леонов В.А., Москатиньев И.В., Сысоев В.К., Ширшаков А.Е., Юдин А.Д. Система глобального позиционирования для Луны на основе активных световых маяков // Вестник НПО им. С.А. Лавочкина. 2017. № 4. С. 5-10.
- Багров А.В., Дмитриев А.О., Леонов В.А., Митькин А.С., Москатиньев И.В., Сысоев В.К., Ширшаков А.Е. Глобальная оптическая навигационная система для Луны // Труды МАИ. 2018. № 99. С. 1-21. Режим доступа: http://trudymai.ru/ published.php?ID=91814/ (дата обращения 18.12.2018 г.).
- Zak A. Luna-Glob Orbiter (Luna-Glob 2 / Luna 26). Режим доступа: http://www.russianspaceweb.com/luna_glob_ orbiter.html/ (дата обращения 19.12.2018 г.).
- Казмерчук П.В., Мартынов М.Б., Москатиньев И.В., Сысоев В.К., Юдин А.Д. Космический аппарат "Луна-25" - основа новых исследований Луны // Вестник НПО им. С.А. Лавочкина. 2016. № 4. С. 9-19.
- Бaгров A.В., Бaрaбaнов A.A., Вернигорa Л.В., Вятлев П.А., Мaртынов М.Б., Пичхaдзе К.М., Сысоев В.К. Применение лазерных диодных маяков для определения координат космических и наземных объектов // Космические исследования. 2013. Т. 51. № 5. С. 419-427.
- Ширенин А.М., Мазурова Е.М., Багров А.В. Построение высокоточной селенодезической системы координат на физической поверхности Луны с помощью светодиодных маяков, расположенных на ее поверхности // Космические исследования. 2016. Т. 54. № 6. С. 493-498.
- Bagrov A.V., Leonov V.A., Mitkin A.S., Nasyrov A.F., Ponomarenko A.D., Pichkhadze K.M., Sysoev V.K. Single-satellite global positioning system // Acta Astronautica. 2015. № 117. P. 332-337.
- Зубов Н.Е., Савчук Д.В., Старовойтов Е.И. Анализ возможностей, оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты // Космическая техника и технологии. 2014. № 1(4). С. 67-74.
- Яскович А.Л., Власенко О.В., Макаров В.П. Оптическая схема телескопа Т-170М комплекса научной аппаратуры "Спектр-УФ" // Вестник НПО им. С.А. Лавочкина. 2014. № 5. С. 61-66.
- Королёв Б.В. Технология работы космической оптической линии связи для повышения оперативности управления и получения информации потребителем в процессе функционирования космических средств // Космическая техника и технологии. 2014. № 1(4). С. 39-47.
- Горячев А.В., Смотряев С.А., Вернигора Л.В., Сысоев В.К. Особенности конструкции световых маяков для лунных посадочных станций // Вестник НПО им. С.А. Лавочкина. 2013. № 2. С. 31-34.
- Ефанов В.В., Долгополов В.П. Луна. От исследования к освоению (к 50-летию космических аппаратов "Луна-9" и "Луна-10") // Вестник НПО им. С.А. Лавочкина. 2016. № 4. С. 3-8.
