Построение систем связи с динамической непериодической топологией

Автор: Дмитриев В.Н., Сорокин А.А., Пищин О.н
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 1 т.6, 2008 года.
Бесплатный доступ
В статье рассматривается способ построения сетей связи с динамической непериодической топологией для организации каналов передачи информации с ограниченным временем задержки.
Короткий адрес: https://sciup.org/140191195
IDR: 140191195 | УДК: 621.3
Construction of communication systems with dynamic nonperiodic topology
In this article the way of construction of transmission net-works with dynamic nonperiodic topology for the organization of transmission channels of the information with the limited time delay is considered.
Текст краткого сообщения Построение систем связи с динамической непериодической топологией
Одним из направлений развития систем наземной мобильной связи является расширение ее зоны покрытия за счет обслуживания крупных объектов находящихся вне зоны действия сетей наземной связи. К объектам этой категории относят крупные транспортные объекты, объекты добычи полезных ископаемых, места проведения массовых мероприятий [1]. Обеспечение системами наземной мобильной связи таких объектов связано с рядом трудностей. Одна из них – создание надежной транспортной сети связи между объектами и существующими системами передачи информации.
В настоящее время для решения этой задачи используют системы спутниковой связи, однако они обладают следующими недостатками [2-3]:
-
- зависимость ослабления сигнала в канале связи от состояния атмосферы и околоземного космического пространства (дожди, облачность, метеорные потоки);
-
- значительные расстояния прохождения сигнала при использовании геостационарных спутников связи;
-
- создание и эксплуатация систем космической связи наносит значительный экологический ущерб.
Альтернативным вариантом построения магистральных сетей связи является совмещение технологий атмосферных ретрансляторов [4, 5] и сетей связи с динамической топологией [6, 7]. Одна из трудностей при построении сетей связи с динамической топологией – организация системы маршрутизации, позволяющей передавать информацию в установленные нормы по задержке сигнала.
Наибольшее распространение среди сетей связи с динамической топологией получили системы спутниковой связи [2; 4; 8], а также Ad-hoc networks, развивающиеся в настоящее время как приложение для сетей передачи данных IEEE 802.11, – [6; 9-10].
Для космических сетей связи с динамической топологией используютсяалгоритмы,основанные на периодическом (детерминированном) характере изменений в орбитальной группировке [8].
Поскольку перемещение крупных наземных объектов явление предсказуемое (существуют точные графики движения кораблей и поездов), но непериодическое и число объектов на обслу- живаемой территории может изменяться с течением времени, то требуются методы позволяющие решить задачу маршрутизации для таких объектов [11].
Постановка и решение задачи
Определить условия работоспособности сети связи с динамической непериодической топологией при передаче информации в режиме реального времени.
Протоколы маршрутизации, предназначенные для Ad hoc networks требуют либо постоянного обновления маршрутизационной информации, либо поиска маршрута в момент запроса [6]. При моделировании движения терминалов в Ad hoc networks используется модель случайного перемещения [10]. Перемещение объектов представляется в виде последовательности стационарных состояний с постоянной длительностью Δt ( Δt - интервал стационарности или время паузы). В течение интервала стационарности необходимо рассчитать оптимальный маршрут между любыми двумя объектами (или собрать информацию о состоянии сети) за время T , и передать информацию за время T , тогда длительность Δt определяется следующим образом [11]:
At = T расч + Т пер , (1)
В случае высокой мобильности узлов параметры системы постоянно изменяются. Недостаток расчета оптимального маршрута по требованию или непрерывного сбора данных о состоянии сети, заключается в сложности передачи информации в режиме реального времени, а также необходимости передачи большого объема служебного трафика, что приводит к снижению полезной пропускной способности сети (отношения передаваемой информации пользователей к общему объему данных передаваемых по каналам связи) [6].
Для обеспечения минимальной задержки при фиксированном значении Δt должно выполняться условие [11]: Трасч < Тпер, но при большой скорости изменения параметров системы возникает необходимость уменьшения интервала стационарности Δt, следовательно пропорционально уменьшается T . Поэтому работоспособность сети ограничивается скоростью изменения параметров самой сети (например, взаимным расположением объектов), и скоростью расчета оптимального маршрута или скоростью сбора данных о состоянии сети, которые ограничивается быстродействием вычислительных устройств, задействованных на выполнение этих операции.
При использовании для расчета таблиц маршрутизации алгоритмов, основанных на периодических изменениях топологии сети [8], время расчета оптимального пути или сбора информации о состоянии сети T расч в формуле (1) заменяется на время смены очередной таблицы маршрутизации - Т см [11], тогда:
At = Тем + Тпер ■ (2)
см пе
Основное преимущество при использовании предварительного расчета таблиц маршрутизации заключается в том, что меньше зависит от количества узлов коммутации, площади обслуживаемой территории и скорости перемещения объектов, т.к. основная масса сложных расчетов выполняется предварительно, и таблицы маршрутизации для любого Δt определяются с высокой долей вероятности заранее. Поэтому время задержки сигнала при использовании этого метода с большей вероятностью уложится в норму, чем при использовании методов, основанных на постоянном обновлении маршрутизационной информации или поиске маршрута в момент запроса [11].
В отличие от спутниковых систем связи, при рассмотрении процесса перемещения крупных наземных объектов периодичность процесса ухудшается и в предельном случае период повторения топологии Тпов ^ то , так как число объектов и условия их перемещения в зависимости от времени суток, погоды, других условий может изменяться. Поэтому вместо периода повторения T пов , целесообразнее использовать время прогноза Т пр – интервал времени, для которого можно спрогнозировать наиболее вероятные ситуации, на основании заранее известных маршрутов объектов.
При расчете времени прогноза Т пр должны учитываться такие факторы как: маршруты перемещения и расположение объектов, входящих в группировку относительно друг друга, а также маршруты и расположение объектов, которые могут войти в группировку в ближайшее время.
В качестве примера (рис. 1) рассмотрим перемещение по поверхности площадью S (п. 1) некоторого количества объектов (п. 2), представленных в виде точек, перемещающихся по определенным маршрутам (п. 3).
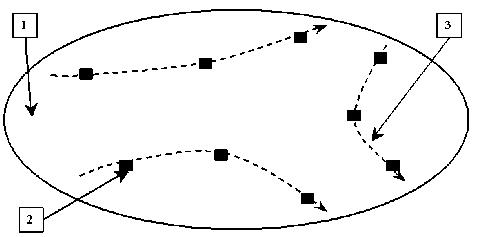
Рис. 1. Расположение объектов на заданной поверхности
Одна из трудностей, с которой можно столкнуться при прогнозировании таблиц маршрутизации в сети связи с динамической непериодической топологией – определение длительности интервала стационарности, поскольку объекты каждой из групп могут иметь различные маршруты перемещения и скорости движения.
При расчете интервала стационарности для сетей связи с динамической непериодической топологией должны учитываться начальные условия перемещения объектов. К ним относятся: место положения, с которого объект становится элементом сети, траектория перемещения объекта по обслуживаемой территории, параметры телекоммуникационного оборудования, расположенного на объекте.
При первоначальном моделировании интервал стационарности был равен времени взаимодействия приемопередающих устройств, расположенных на двух объектах, перемещающихся по плоскости. При расчете интервала взаимодействия были приняты следующие допущения: не учитывалась разность длин широт; а движение объектов представлялось равномерным и прямолинейным.
В качестве модели рассмотрим плоскость (рис. 2), на которую нанесена координатная сетка (в реальных условиях это картографическая сетка Земли, а координаты объекта – это координаты соответствующие широтам и долготам). По заданной плоскости перемещаются объекты « 1 » и « 2 » со скоростями V1 и V2 в различных направлениях, где α и β , - углы между направлением движения объекта и осью ОХ. Расстояние между объектами D (длина пролета между антеннами). Установление соединения должно происходить, когда значение D не превышает D max , где D max - наибольшая длина пролета,на которой обеспечивается заданная скорость передачи информации, определяется из условий распространения сигнала.
Требуется найти время, в течение которого будет обеспечиваться неразрывность канала связи между объектами.
Поскольку движение объектов равномерное и прямолинейное, траекторию их перемещения можно задать в виде системы уравнений [12]:
x ( t ) = x 0 + v X • t .y ( t ) = Уо + v Y • t
где x 0 , y 0 – начальные координаты перемещения объектов; v X , v Y – скорости перемещения объекта относительно осей X и Y, соответственно; t – время движения объекта.
Подставляя параметры каждого объекта в систему уравнений (3) получим:
-
- параметры движения первого объекта:
x i ( t ) = x oi + v x i • t ; .yi ( t ) = ^01 + v Y i • t ;
причем v X 1 = V 1 • cos( a ) , v Y 1 = V 1 • sin( a ) ;
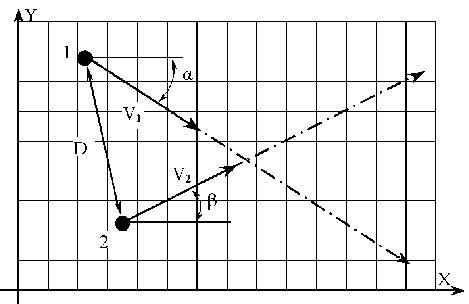
Рис. 2. Плоскость с перемещающимися объектами
-
- параметры движения второго объекта:
x 2 ( t ) = x 02 + v X 2 • t ;
У 2 ( t ) = У 02 + v Y 2 • t ; (5)
причем v X 2 = V 2 • cos( e ) , v Y 2 = V 2 • sin( e )
Зная параметры перемещения объектов « 1 » и « 2 » можно составить неравенство на основании формулы расстояния между двумя точками [13]:
-
[X 2 (t) - X i (t)] 2 + [ У 2 (t) - y i (t)] 2 < D 2max . (6)
Подставляя значения выражений (4, 5) в (6), получаем:
[( x 02 + v x 2 ■ t ) - ( x oi + v x i ■ t )] +
2 2 (7)
+ [( ,y 02 + v Y 2 ■ t ) - ( ,y 01 + v Y i ■ t )] ^ D max
Подставляя значения проекций скорости в (7), получим:
[(x 02 + V 2 • cos( e ) • t ) - (x 01 + V 1 • cos( a ) • t )] 2 +
+ [( У 02 + V 2 • sin( e ) • t ) — ( У01 + V i • sin( a ) • t )] 2 < (8)
≤ D max
Для удобства вычислений неравенство (8) представляем в виде уравнения:
[( x 02 + V 2 • cos( e ) • t ) - ( x 01 + V 1 • cos( a ) • t )] 2 +
+ [( У 02 + V 2 • sin( e ) • t ) - ( У 01 + V i • sin( a ) • t )] 2 = (9)
2 — D max ,
Решая уравнение (9) относительно переменной « t », получаем два момента времени « t1 » и « t2 ». Используя их разность, получим:
ΔT =t 2 -t 1 , (10) где - ΔT длительность интервала, в течение которого существовала неразрывная связь между объектами «1» и «2» (интервал взаимодействия). Соответственнов течениеинтервала взаимодействия (10) параметры канала будут удовлетворять требованиям по количеству ошибок в канале, обеспечивая тем самым требуемую скорость передачи информации.
По характеру корней уравнения (9) можно судить о возможности появления канала связи между объектами. То есть, если корни уравнения действительные положительные числа, то известно время возникновения и разрыва канала связи. Если один из корней отрицательное число, то канал связи между объектами уже существовал на момент расчета интервала взаимодействия. Если корни уравнения комплексные числа, то появление канала связи между объектами невозможно.
Поскольку расстояние Dmax - это максимальное расстояние между объектами, на котором возможно использование радиоканала при заданной скорости передачи и высоте подвеса антенн, то при значениях D < Dmax канал связи будет сохранять работоспособность.
На программном комплексе «RPLS ONEGA» [14] была проведена оценка пригодности радиоканала (проходящего над водной поверхностью) для обеспечения заданной скорости передачи информации 34 Мбит/с при диаметре антенны 0,6 м и коэффициенте усиления 31,7 dBm. Оценка производилась по значениям показателя потерь качества по ошибкам (ПКО) T SESR (SESR - доля сильно пораженных секунд) и показателя (коэффициента) неготовности (ПНГ) К нг в зависимости от расстояния между объектами, высот подвеса антенн и рабочих частот приемопередающего оборудования. Результаты оценки приведены в таблице 1.
При перемещении по плоскости n объектов необходимо произвести предварительные расчеты всех интервалов взаимодействия между объектами. Общее число уравнений, необходимое для поиска всех интервалов взаимодействия определяется выражением
m
M = I (n -1), n=2
где М - число уравнений, необходимое для расчета, m – число объектов.
Таблица 1. Оценка пригодности радиоканала
|
Высота подвеса антенн, Н, м. |
Диапазон работы оборудования, ГГц. |
Расстояние между объектами, D, км. |
Пригодность радиоканала |
|
|
ант 1 |
ант 2 |
|||
|
15 |
15 |
7 |
12 |
Да |
|
15 |
10 |
7 |
12 |
Да |
|
15 |
6 |
7 |
12 |
Да |
После определения времени взаимодействия между каждой парой объектов необходимо вы-братьминимальнодопустимыйинтервал времени взаимодействия, для назначения его интервалом стационарности Δt ≥ t доп , где t доп - минимально допустимое время стационарности системы, определяемое из максимально допускаемого времени задержки сигнала t за д . Например, для дуплексной телефонной связи максимально допустимое время задержки составляет 300 мс [2]. Тогда t don = T CM min + T nep min , гДе Т см min - минимально возможное время смены таблицы маршрутизации, определяется количеством и взаимным расположением объектов и скоростью доступа вычислительного комплекса к ячейкам памяти, в которых расположена таблица маршрутизации; T пер min - минимальное время передачи, в течение которого целесообразно вести передачу между отправителем и получателем информации.
Чтобы задержка сигнала была наименее ощутима, должно выполняться условие T см min < t за д .
В зависимости от требований, предъявляемых к оборудованию, используемому для смены таблиц маршрутизации, коэффициент N, показывающий во сколько раз t зад больше T см min , определяется так: N = t / T . зад см min
Для любого интервала стационарности Δt , в зависимости от взаимного расположения узлов в сети связи с динамической непериодической топологией можно сопоставить статический граф G = ( P , U ) с конечным множеством вершин P (подвижные объекты п. 2 и шлюзы для связи с другими сетями п. 4) и множеством ребер (дуг) U (СВЧ радио или воздушно-оптические линии связи поз. 5) (рис. 3)
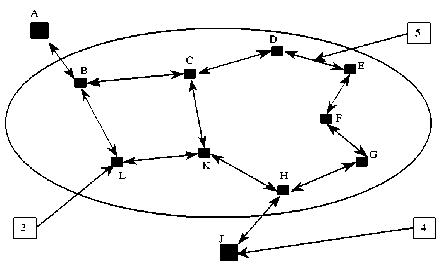
Рис. 3. Граф сети для интервала стационарности Δt
Все расчеты по выбору оптимальных по расстояниям или нагрузке маршрутов производятся в центре управления сетью заранее для каждого интервала стационарности Δt на основании наиболее вероятных маршрутов перемещения на определенное время прогноза T пр . Для увеличения надежности сети необходимо прогнозировать наиболее вероятные отклонения реального маршрута от прогнозируемого.
Выводы
При решении вопросов построения систем связи с динамической топологией были получены следующие выводы, имеющие практическое значение.
-
1. Предложено для расчета состояний группировки ограничиваться временем прогноза.
-
2. Выбран способ расчета времени взаимодействия коммутационного оборудования, в зависимости от параметров движения объектов.
-
3. Получены условия выбора интервала стационарности ограниченного допустимым минимальным значением, что необходимо при расчете таблиц маршрутизации.
-
4. Показан способ представления динамической топологии сети как последовательность статических графов, сменяющих друг друга через выбранный интервал стационарности.
Результаты данной работы обсуждались на Международной конференции «Информационные технологии в современном мире» г. Таганрог [3] 2006 г., на Всероссийской научно-технической конференции «Современные проблемы радиоэлектроники» г. Красноярск [11] 2007 г., на конференции «Проблемы развития естественных, технических и социальных систем» г. Таганрог [5] 2007 г., на 14-й Всероссийской межвузовской научно-технической конференции г. Зеленоград [15] 2007 г., на Международной научно-практической конференции «Информационные и телекоммуникационные системы и технологии» г. Санкт-Петербург [16] 2007 г.
Список литературы Построение систем связи с динамической непериодической топологией
- Дмитриев В.П., Сорокин А.А. Возможности конвергенции систем подвижной связи/Вестник АГТУ. Вып. 1. Астрахань: Изд. АГТУ, 2007.-С. 68-71.
- Горностаев Ю.М., Соколов В.В., Невдяев Л.М. Перспективные спутниковые системы связи. М.: «Горячая Линия-Телеком» МЦНТИ, 2000. -132с.
- Дмитриев В.П., Сорокин А.А. Возможности повышения экологической безопасности систем глобальной связи/Материалы МНТК «Информационные технологии в современном мире». Ч. 5. Таганрог: ТРТУ, 2006. -С. 41-44.
- Вишневский В.М., Ляхов А.И., Портной С.Л.,Шахнович И.В. Широкополосные беспроводные сети передачи информации. М.: Техносфера, 2005.-592 с.
- Дмитриев В.П., Пищин О.П., Сорокин А.А. Проблемы развития телекоммуникационных систем мониторинга и управления удаленными объектами/Материалы МНТК «Проблемы развития естественных, технических и социальных систем». Ч. 3. Таганрог: Изд. «Антон», ТТИ ЮФУ, 2007. -С. 9-13.
- Amitava Mukherjee, Somprakash Bandyopadhyay, Debashis Saha. Location Management and Routing in Mobile Wireless Networks Artech House Boston -London 2003. -250 p.
- Сорокин А.А. Организация сотовой связи на подвижных удаленных объектах/Материалы РШК «Мобильные системы передачи данных». М.: МИЭТ, 2006. -С. 105-107.
- Sujit R. Baliga Technical Report «Design of a Space Based Internet Emulation System» Project Sponsor:NASA Glenn Research Center Copyright © 2002:The University of Kansas Center for Research/https://www.ittc.ku.edu/publications/documents/Baliga2002_24350-05%20 Baliga.pdf
- Pravin Bhagwat Computer Science Department University of Maryland College Park, MD 20742, Charles E. Perkins IBM, T.J. Watson Research Center Hawthorne, NY 10562 «Highly Dynamic Destination-Sequenced Distance Vector Routing (DSDV) for Mobile Computers»/www.cs.virginia.edu/~c!7v/cs851 -papers/dsdvsigcomm94.pdf
- Charles E. Perkins Sun Microsystems Laboratories Advanced Development Group Menlo Park. CA 94025, Elizabeth M. Royer Dept. of Electrical and Computer Engineering University of California. Santa Barbara. CA 93106 «Ad-hoc On-Demand Distance Vector Routing»/www. ee.iitb. ac.in/~comlab/seminar/nishantl_Refl. pdf
- Сорокин А.А., Пищин О.Н., Дмитриев В.Н. Способы организации систем связи с подвижными базовыми станциями/Сб. научных трудов «Современные проблемы радиоэлектроники». Красноярск: Изд. СФУ, 2007. -С. 292-294.
- Сивухин Д.В. Общий курс физики. Т.1. Механика. 4-е изд. М.:ФИЗМАТЛИТ; Изд. МФТИ, 2002. -560 с.
- Ильин В.А., Позняк Э.Г. Аналитическая геометрия. 6-е изд. М.: ФИЗМАТЛИТ 2001. -240 с.
- Программный комплекс «RPLS ONEGA».
- Сорокин А.А., Перов А.А. Анализ способов представления систем связи с подвижными базовыми станциями/14-я ВМНТК студентов и аспирантов МИЭТ «Микроэлектроника и информатика-2007». Тез. докладов. М.: МИЭТ, 2007.-С. 323.
- Дмитриев В.Н., Пищин О.П., Сорокин А.А. Способы организации высокоскоростных сетей передачи информации при помощи подвижных базовых станций/Труды МНТК «Телекоммуникационные и информационные системы». Труды МНТК СПб.: Изд. СПбГТУ, 2007.-С. 139-143.
