Построение системы управления процессом ориентации панели солнечной батареи в среде динамического моделирования технических систем SimInTech

Автор: Л.А. Михайленко, В.В. Устименко, А.В. Чубарь
Журнал: Космические аппараты и технологии.
Рубрика: Инновации космической отрасли
Статья в выпуске: 3, 2020 года.
Бесплатный доступ
Энергетическая эффективность панелей солнечных батарей во многом определяется точностью их ориентации на Солнце. В статье представлены результаты разработки системы программного управления процессом ориентации панели солнечной батареи в зависимости от географического расположения и календарной даты. Модель системы реализована в среде динамического моделирования технических систем SimInTech и включает модель комплекса электромеханических устройств ориентации панели солнечной батареи, дискретный ПИД-регулятор и блок программного управления, которые реализованы на основе типовых блоков и субмоделей SimInTech. Система ориентации панели позволяет изменять координаты азимута и места, определяющие ориентацию панели в трехмерном пространстве и управлять ими по заданной программе. Система реализована как пакет проектов, взаимодействующих через общую базу сигналов, которая обеспечивает обмен информацией между проектами, делая модель системы гибкой и универсальной. Результат работы системы управления представлен в 3D модуле визуального редактора, который позволяет наглядно отследить результаты управления и эффективность использования оборудования. Для подтверждения показателей качества управления ориентацией панели солнечной батареи производится расчет процента получаемой энергетической мощности.
Панель солнечной батареи, система управления, динамическое моделирование, SimInTech, 3D визуализация
Короткий адрес: https://sciup.org/14117450
IDR: 14117450 | УДК: 621.31 | DOI: 10.26732/j.st.2020.3.06
Designing a control system for the orientation of solar panels in the dynamic simulation environment of SimInTech technical systems
The energy efficiency of solar panels is largely determined by the accuracy of their orientation to the Sun. The article presents the results of the development of a software control system for the orientation of the solar panel, depending on the geographical location and calendar date. The system model is implemented in the environment of dynamic modeling of SimInTech technical systems and includes a model of a complex of electromechanical devices for solar panel orientation, a discrete PID controller and a software control unit, which are implemented on the basis of standard SimInTech blocks and submodels. The panel orientation system allows to change the coordinates of the azimuth and location that determine the orientation of the panel in three-dimensional space and control them according to a given program. The system is implemented as a package of projects that interact through a common signal base, which provides information exchange between projects, making the system model flexible and universal. The result of the control system is presented in the 3D module of the visual editor, which allows you to visually track the results of management and the efficiency of equipment use. To confirm the quality indicators of the orientation control of the solar panel the percentage of the received energy capacity is calculated.
Текст статьи Построение системы управления процессом ориентации панели солнечной батареи в среде динамического моделирования технических систем SimInTech
Космическая индустрия может показаться на первый взгляд чем-то отдаленным и недоступным, однако большая часть населения даже не предполагает как ежедневно встречает космические технологии, которые применяются в бытовых вещах и используются каждый день. Например, это выражается в использовании современных источников электроэнергии на основе солнечных батарей.
Актуальность использования современных источников электроэнергии связано со стремительной скоростью исчерпывания традиционных ресурсов и ужесточению требований экологии. Дефицит и ограниченность ресурсов постепенно приводят к переходу к альтернативным источникам энергии, которые возобновляемы, а главное экологичны.
Преобразование солнечной энергии является одним из перспективных и активно развиваемых направлений [1], так как солнечная энергия широкодоступна, практически безгранична и не загрязняет окружающую среду. Важность такого перехода трактуется несколькими фундаментальными аспектами:
-
• Экология. Относительно продолжительное время основным фактором загрязнения окружающей среды является использование традиционных источников энергии. Их применение, с большей долей вероятности, может привести в будущем к необратимым последствиям и нанести колоссальный удар по экологии планеты.
-
• Экономика. Благодаря стремительному развитию энергетической отрасли в настоящее время наблюдается тенденция уравнивания стоимости энергии, производимой альтернативными источниками относительно энергии, производимой традиционными источниками [2].
-
• Политика. Стоит отметить, что альтернативные источники энергии обладают практически
неограниченным запасом, чего не скажешь о традиционных источниках. С данной точки зрения вполне справедливо полагать, что страны, которые в полной мере освоили или в ближайшее время освоят технологии добычи энергии альтернативным способом, в будущем будут являться лидерами «энергетической гонки», тем самым диктуя собственные условия и цены на мировом рынке.
Россия на данной стадии развития значительно отстает в этом направлении, но постепенно политика в области возобновляемых источников изменяется. За 2014–2016 годы введено более 130 МВт новой мощности возобновляемых источников энергии, где преимущество имеют солнечные электростанции. В 2017 году введено еще более 140 МВт – больше,чем за предыдущие два года, из них более 100 МВт приходится на солнечные, а 35 МВт – ветровые электростанции. Россия делает ставку не только на освоение передовых технологий, но и на развитие компетенций с целью дальнейшего экспорта высокотехнологичной продукции [3].
1. Постановка задачи
Повышение эффективности солнечной электроэнергетики связано, в частности, с автоматизацией процесса ориентации панелей солнечных батарей наземных гелеоэлектростанций. В данной статье рассматривается именно эта цель.
Из всех существующих программных комплексов для разработки системы управления ориентацией солнечной батареи выбор был сделан в пользу российского аналога зарубежных моделирующих программ – прикладного программного пакета SimInTech . По характеристикам данный вариант подобен иностранным программам, таким как Simulink , SumSim и др. Практичный редактор структурных схем, эффективные численные методы, встроенный язык программирования и широкая библиотека типовых блоков – позволяют осуществить модели практически любой степени сложности [4–7].
Моделирование в среде SimInTech процесса ориентации панели солнечной батарей реализуется на основе четырех моделей: модели управления положением Солнца, модели ориентации панели солнечной батареи, модели системы управления и модуля визуализации 3D, которые взаимодействуют друг с другом через единую базу сигналов (риc. 1). Каждая из моделей реализована в виде отдельного проекта SimInTech , объединенных в пакет (риc. 2). Такая организация дает возможность построения различных алгоритмов управления с учетом влияния параметров отдельных элементов системы и окружающей среды. 179

Рис. 1. Структура взаимодействия моделей
Панель солнечной батареи любой наземной гелеоэлектростанции имеет определенные географические координаты по отношению к экватору, а, следовательно, по отношению к текущему положению Солнца на земном горизонте. Система ориентации панели, включающая комплекс электромеханических устройств, позволяет изменять азимут и координаты места, определяющие ориентацию панели в трехмерном пространстве в автоматическом режиме с целью наилучшей ее ориентации на Солнце [8; 9].
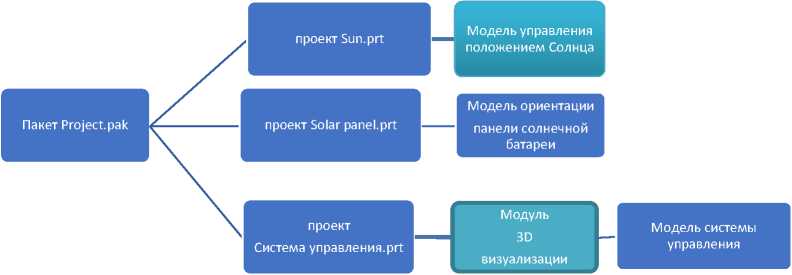
Рис. 2. Реализация пакета в системе динамического моделирования SimInTech
Регулируемыми выходными данными являются единицы измерения углов азимута (изменяющийся в диапазоне от -90 до 90 градусов) и места (изменяющийся в диапазоне от 0 до 90 градусов). Управляющими координатами являются сигналы управления электроприводами в горизонтальной и вертикальной плоскостях.
Движение панели солнечной батареи осуществляется благодаря сигналам, которые проходят через субмодель «Контроль», далее на исполнительные электродвигатели, где и происходит изменение положения панели в горизонтальной и 180 вертикальной плоскостях.
2. Построение модели
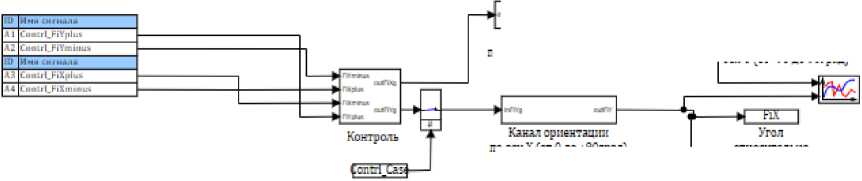
Реализованная в среде SimInTech модель ориентации панели солнечной батареи состоит из опорно-поворотной системы (рис. 3), которая включает в себя три субмодели: «Контроль» и «Каналы ориентации» по осям X и Y .
Субмодель «Контроль» подразумевает получение выходного сигнала из суммирования положительного и отрицательного сигнала, которые проходят блок «Ограничитель», благодаря свойству устанавливается пороговый минимум и максимум сигнала.
Вторая и третья субмодель «Канал ориентации» обеспечивают подсистему наведения установки на Солнце (рис. 4) в вертикальной и горизонтальной плоскостях.
Для получения необходимой точности и качества изменения положения объекта необходимо включить на вход системы дискретный ПИД-регулятор. Цель использования регулятора – получение точного управляющего сигнала. Элемент
Том 4
«дискретный ПИД-регулятор» является субмоделью, в которой используется стандартный блок SimInTech «Дискретный ПИД-регулятор». Период квантования задан равным 1 [10].
По получившемуся графику (рис. 6) можно сделать вывод, что переходный процесс исходной системы – колебательный с большим процентом перерегулирования. В связи с плохим качеством переходного процесса, а также с целью приведения графика к монотонности, был оптимизирован ПИД-регулятор (рис. 5).
Установим необходимые параметры:
-
• время расчета – 100 с;
-
• допустимое перерегулирование – 11 %.
В результате оптимизации вектор из трех коэффициентов (составляющих) направляется в блок Запись в список сигналов , откуда вычисленные значения перенаправляются в дискретный ПИД-регулятор, изменяя его параметры. В блоке Оптимизация заданы следующие свойства: абсолютная точность подбора значений выходов – 0,001, начальное приближение выходов блока – 0, минимальное значение выходов блока – 0.
В результате использования ПИД-регулятора и настройки его коэффициентов ( Kp = 0,2; K i = 1,1243072·10 -289 ; K d = 2.1219958·10 -314 ) переходный процесс (рис. 6) системы автоматического управления приобрел следующие характеристики: перерегулирование – 0 %, ошибка – 0 %, время переходного процесса – 17 с., колебательность отсутствует.
В качестве основных внешних возмущающих воздействий выступают текущие координаты Солнца, определяющие его текущее положение по отношению к панели солнечной батареи.

■ НопмнП
1 И ^ 1 График
Угол }тла¥ относительно оси ¥ (от -90 до 90град)
со осн л [от и до ♦ 30 град]
График vrnaX отноаттельно оси X (от 0 до +90град)
Рис. 3. Модель ориентации панели солнечной батареи

Канал ориентации □о cat Y [от -90 до 90град)

Рис. 4. Структурная схема механической подсистемы ориентации
Модель солнечного объекта отображает принцип перемещения объекта по заданной траектории (рис. 7). Схема определяет основные функциональные части изделия, их назначения и взаимосвязи между ними.
Субмодель «Управление положением Солнца» содержит в себе схему управления приводом движения (рис. 8). Аналогично предыдущей модели на вход поступают задающие сигналы управления, что приводит в действие необхо-
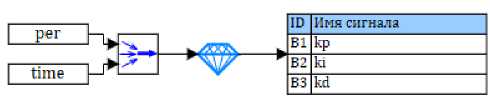
Рис. 5. Схема оптимизации параметров регулятора
димые ключи для продолжения пути сигналов. Поступающие сигналы объединяются в одну точку, которая создает необходимую траекторию движения.
При запуске проекта из стороннего фай-
Схема состоит из модулей:
• список сигналов, подаваемых на вход;
ла осуществляется загрузка следующих данных: точка восхода и захода Солнца. В данной работе в качестве стороннего файла использовался файл Excel . Написанная программа в скрипте (рис. 9) позволяет читать и загружать в базу данных не-
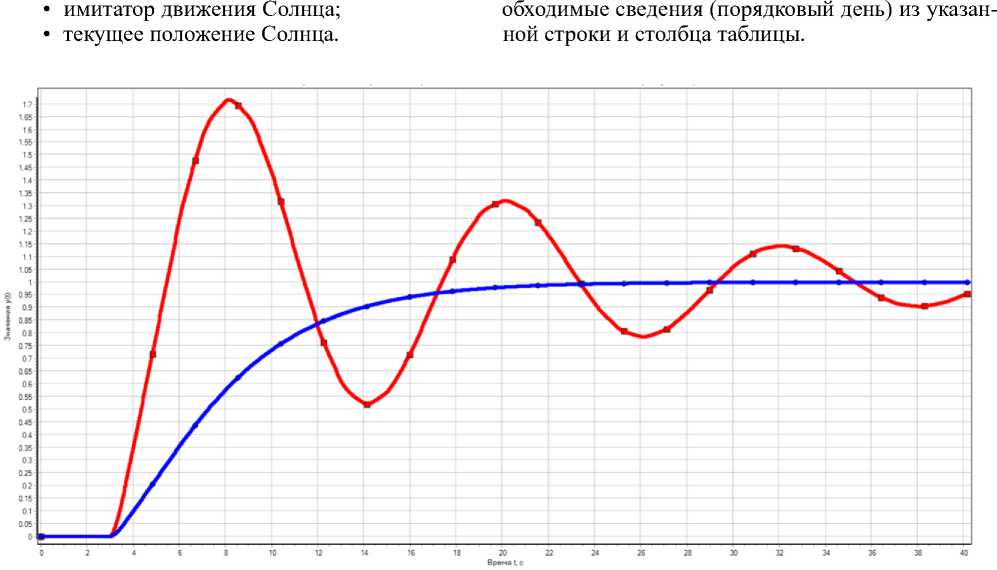
Рис. 6. График переходного процесса привода до/после оптимизации ПИД-регулятора
Данные загружаются в две переменные (точка восхода, точка захода), последующая загрузка приводит к перезаписи данных в переменной. Загрузка переменных позволяет регулировать работу ключей: подъем и спуск объекта. Завершающим шагом работы схемы является передача данных в модуль визуального 3D проектирования.
Основной задачей 3D-модуля является наглядная демонстрация ориентации панели солнечной батареи. Опираясь на основные функции, написанные в скрипте проекта (рис. 10) солнечная батарея, получая данные о траектории движения Солнца, производит своевременно необходимый поворот и угол наклона (рис. 11).
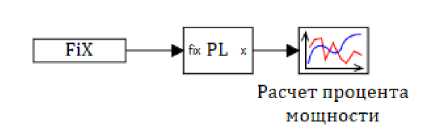
Для оценки эффективности управления в модели производится расчет процента получаемой энергетической мощности при текущем поло- жении панели солнечной батареи. Расчет организован в блоке программирования, где выполнена формула расчета (рис. 12).
Входными данными для определения процента получаемой мощности является сигнал
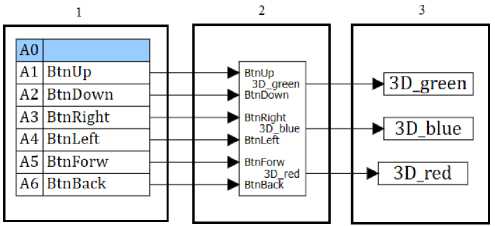
Рис. 7. Модель управления положением Солнца
(оСМИЧЕскиЕ
АППАРАТЫ И
Том 4
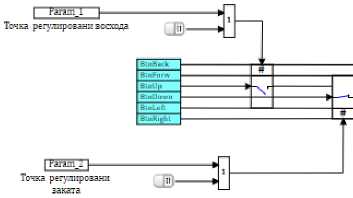
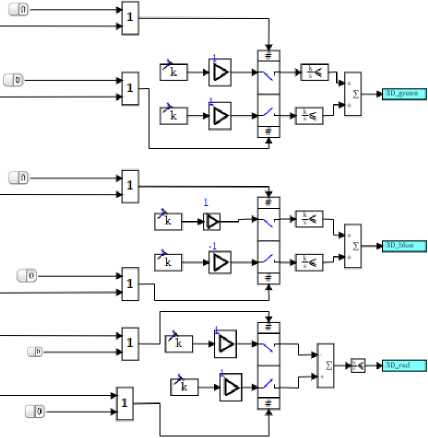
Рис. 8. Модель движения Солнца
initialization id = excelcreateobject;
excelopendocument(id, afilename);
row_count = excelgetrowcount(id, 1);
col_count = excelgetcolcount(id, 1);
Param_Sunrise = excelgettext(id, 1, ParamNum, 1) Param_Sunset= excelgettext(id, 1, Param_Num, 2); excelquit(id, True);
end;
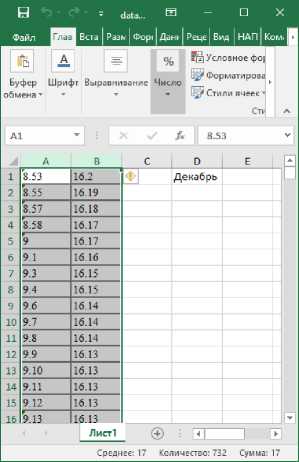
Рис. 9. Программный код чтения из файла/содержимое файла
^ Скрипт страницы : Главная страница: 0:\Институт\ВКР\Прое1стИТОГ\Проект14.04\ЗО.рг1
Файл Правка Поиск Расчёт Справка d № I М » IS И Ь I ^ Й | Рл ^в | Я ^ Е И Е о I yv

Rsol=0.5
Xpos=10;
Xposl = 0;
Yposl = 1.5;
Zposl = 0;
wid = 0.2;
Obj2 = viewer3dplotsphere(WinID, Rsol, Xsol, Ysol, Zsol);
Viewer3DSetTexture(WinID, Obj2, "VKR/1.jpg");
Viewer3DSetWindowSize(WinID, 1000, 600);
Viewer3DSetWindowPosition(WinID, 600, 130);
Viewer3DSetCameraTarget(WinlD, Obj2);
viewer3dsetcameraposition(WinID, -5, 5, 5);
viewer3dsetcolor(WinID, Obj2, 65535);
Objl = viewer3dplotparallelepiped(WinID, len, hei, wid, Xpos, Ypos, Zpos);
Viewer3DSetTexture(WinID, Objl, "VKR/2.jpg");
Viewer3DSetCameraTarget(WinlD, Obj1);
Viewer3dsetcolor(WinID, Objl, 12632256);
Viewer3dsetposition(WinID,0bjl, Xposl, Yposl, Zposl);
Viewer3dsetturn(WinID, Objl, Contrl_FiYl);
Viewer3dsetroll(WinID, Objl, Contrl_FiZl);
Viewer3dsetpitch(WinID, Objl, Contrl_FiXl);
viewer3dsetposition(WinID, Obj2, -Xpos+3D_red, 3D_blue, 3D_green);
Viewer3DSetEulerAngles(WinID, Obj2, 0, 0, time*10);
о состоянии угла наклона панели солнечной батареи (рис. 13).
Заключение
В программной среде SimInTech из типовых блоков реализована модель системы управления процессом ориентации панели солнечной батареи, построенная на основе моделей комплекса электромеханических устройств с оптимизирован- ными настройками ПИД-регуляторов и траектории движения Солнца. Система автоматического управления обеспечивает программное управление углами азимута и места панели в автоматическом режиме с целью наилучшей ее ориентации на Солнце в зависимости от географического положения и календарной даты. Подключен модуль 3D визуализации текущей ориентации панели относительно Солнца и контроль эффективности использования солнечной энергии.
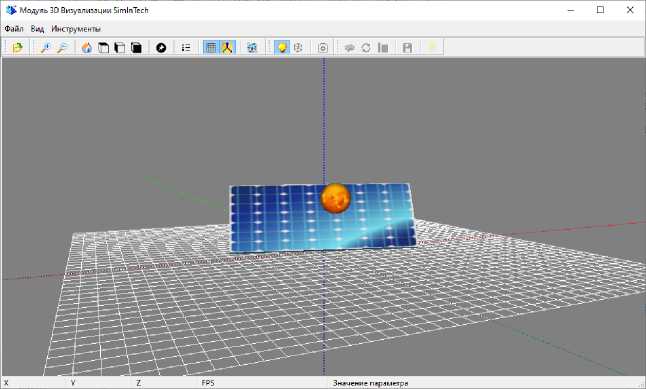
Рис. 11. Создание объекта «Солнце»
i (input Contrl_FiXl;
output p; begin
■ percent=tg((ABS(90- Contrl_FiXl)))/sin((ABS(90- Contrl_FiXl)));
-
• x=l/percent;
-
• p= x*100;
Рис. 12. Субмодель реализации расчета процента мощности от угла наклона панели солнечной батареи в среде моделирования SimInTech
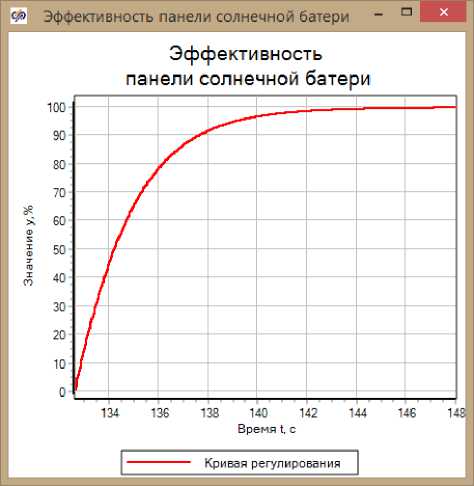
Рис. 13. Эффективность панели солнечной батареи

№ 3 (33) 2020
Том 4
Список литературы Построение системы управления процессом ориентации панели солнечной батареи в среде динамического моделирования технических систем SimInTech
- Энергетическая стратегия Российской Федерации на период до 2035 года [Электронный ресурс]. URL: https://minenergo.gov.ru/node/1026 (дата обращения: 07.09.2020).
- Солодков М. В., Елфимова Ю. В. Развитие солнечной энергетики как фактор экономической безопасности России [Электронный ресурс]. URL: https://cyberleninka.ru/article/n/razvitie-solnechnoy-energetiki-kak-faktorekonomicheskoy-bezopasnosti-rossii/viewer (дата обращения: 25.04.2020).
- Ратнер С. В. Стоимостной анализ развития солнечной энергетики в мире и ее перспективы для России // Научно-технические ведомости СПбГПУ. Экономические науки. 2014. № 3 (197). С. 90–97.
- Карташов Б. А., Щекатуров А. М., Шабаев Е. А., Козлов О. С. Среда динамического моделирования технических систем SimInTech. М. : ДМК Пресс, 2017. 424 с.
- Справочная система SimInTech [Электронный ресурс]. URL: https://help.simintech.ru/#o_simintech/o_simintech.html (дата обращения: 15.02.2020).
- Мызникова В. А., Устименко В. В., Чубарь А. В. Построение нечетких регуляторов для систем управления автономных объектов в среде SimInTech // Космические аппараты и технологии. 2019. Т. 3. № 1. С. 22–27. doi: 10.26732/2618-7957-2019-1-22-27.
- Чубарь А. В., Пожаркова И. Н., Устименко В. В. Построение алгоритмов управления термовакуумными испытаниями в среде SimInTech // Космические аппараты и технологии. 2019. Т. 3. № 3. С. 149–154. doi: 10.26732/2618-7957-2019-3-149-154.
- Аржанов К. В. Двухкоординатная система наведения солнечных батарей на Солнце // Известия Томского политехнического университета. 2014. Т. 324. № 4. С. 139–146.
- Китаева М. В., Юрченко А. В., Охорзина А. В., Скороходов А. В. Автономная система слежения за солнцем для солнечной энергосистемы // Ползуновский вестник. 2011. № 3/1. С. 196–199.
- Пид регулирование пид регулятор на практических примерах [Электронный ресурс]. URL: https://trubymaster.ru/pid-regulirovanie-pid-reguljator-na-prakticheskih (дата обращения: 18.05.2020).
