Построение устойчивой обратной связи для молекулярно-электронного датчика с малым демпфированием

Автор: Агафонов В.М., Горчаков И.В., Гордеев Я.А., Ронжин А.Л.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Физика
Статья в выпуске: 2 (66) т.17, 2025 года.
Бесплатный доступ
Проведено моделирование контура обратной связи для молекулярно-электронного сейсмического датчика с низким демпфированием и собственной частотой механической системы, находящейся в рабочем частотном диапазоне. Установлено, что устойчивость контура обратной связи в этом случае гарантированно может быть достигнута при использовании двух корректирующих дифференцирующих звеньев, а практически достигаемый таким образом верхний предел рабочего частотного диапазона может на порядок превышать резонансную частоту механической системы датчика. Эксперимент хорошо согласуется с результатами моделирования. Практически полученная рабочая полоса частот датчика, охваченного обратной связью, составляет 1–400 Гц, а уровень шума заведомо не превышает 10−6 𝑔/ √ Гц.
Молекулярно-электронный датчик, дополнительная инерционная масса, глубокая обратная связь, устойчивость системы, электродинамическая калибровка, годограф обратной связи
Короткий адрес: https://sciup.org/142245017
IDR: 142245017 | УДК: 534.08
Constructing a stable feedback for a molecular-electronic sensor with small damping
The feedback loop of a low-damping molecular-electronic seismic sensor with a natural frequency of the mechanical system within the operational frequency range was simulated. It has been established that the stability of the feedback loop in this case can be reliably achieved using two compensating differentiating elements. The practically attainable upper limit of the operational frequency range thus achieved can exceed the resonance frequency of the sensor’s mechanical system by an order of magnitude. The experimental results are in good agreement with the modeling outcomes. The practically achieved operational frequency range of the sensor under feedback control is 1–400 Hz, with a noise level not exceeding 10−6 𝑔/ √ Hz.
Текст научной статьи Построение устойчивой обратной связи для молекулярно-электронного датчика с малым демпфированием
Сейсмический датчик является источником первичной информации для таких критически важнв1х областей, как сейсморазведка, сейсмология, мониторинг строительных конструкций, плотин, мостов [1-9]. Наиболее широко в настоящее время используется электродинамический геофон, конструкция которого представляет катушку, подвешенную на упругом элементе в постоянном магнитном поле. Колебания катушки, вызванные внешним механическим воздействием, преобразуются в электрический сигнал благодаря явлению электромагнитной индукции.
Ограничения классического геофона - узкая рабочая полоса частот, ограниченная снизу чаще всего величиной 10 Гц, и относительно невысокий коэффициент преобразования. Преодолеть указанные ограничения возможно в рамках электродинамического принципа преобразования сигналов, однако при этом резко увеличивается масса прибора, снижается его механическая прочность, увеличивается стоимость.
Альтернативные технологии представлены сейсмическими МЭМС-акселерометрами [911] и молекулярно-электронными датчиками [12-18]. Последние, благодаря высокому коэффициенту первичного преобразования, оказались способны заменить группу геофонов, обеспечивая также регистрацию низкочастотных сигналов. Тем не менее данная технология не получила широкого распространения в сейсморазведке, поскольку такие датчики пока дороже геофонов. Коэффициент преобразования датчиков существенно снижается на низких температурах, около -30 °C, а преимущества над электродинамическими геофонами в более низком шуме, хотя и значительны, но недостаточны, чтобы стимулировать массовый переход в сейсморазведке на приборы такого типа.
В настоящей работе рассматриваются принципы создания молекулярно-электронного сейсмодатчика высокой чувствительности, отличающегося от использованных ранее модификаций применением дополнительной инерционной массы в сочетании с глубокой электродинамической силовой обратной связью. Дополнительная масса позволяет существенно уменьшить шумы, а глубокая обратная связь - обеспечить широкую рабочую полосу и стабилизировать температурное поведение выходных характеристик.
При этом оказывается, что из-за более низкого демпфирования, а также того обстоятельства, что при увеличении инерционной массы собственная частота механической системы датчика попадает в стандартный для сейсмодатчиков рабочий частотный диапазон, способ формирования обратной связи для такого датчика должен принципиально отличаться от ранее известных. Разработка нового способа формирования обратной связи для датчиков такого типа, его теоретическое обоснование и экспериментальная апробация являются предметом исследования, представленного в настоящей работе.
2. Молекулярно-электронный сейсмодатчик с дополнительной инерционной массой
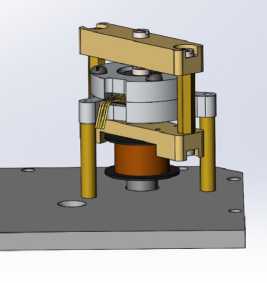
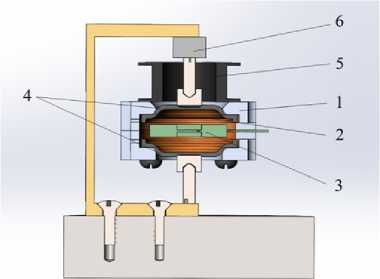
Предметом исследования, проведенного в настоящей работе, был молекулярноэлектронной сейсмический датчик с дополнительной инерционной массой в качестве которой использовались либо внешняя по отношению к датчику рамка (рис. 1, левая часть), либо дополнительной массой служил корпус чувствительного элемента с заключенной внутри него рабочей жидкостью (рис. 1, правая часть). Такой подход, как показано в работе [19], позволяет снизить собственные шумы почти на порядок, при этом практически не изменяя массы и габаритов прибора.
1) Корпус.
2) Рабочая жидкость.
3) Молекулярно-электронный преобразующий элемент.
4) Мембраны.
5) Катушка обратной связи.
6) Магнит механизма обратной связи.
а)
б)
Рис. 1. Макеты датчиков с дополнительной инерционной массой, (а) дополнительная масса задается внешней рамкой; (б) дополнительной массой является корпус преобразующего элемента
3. Теоретическая модель контура обратной связи
В работе [19] исследованы общие принципы работы такого датчика и его собственные шумы. При этом наиболее высоких характеристик можно достичь при использовании молекулярно-электронных датчиков в составе электромеханического контура с обратной связью, что обеспечивает линейность преобразования, стабильность параметров и существенное расширение частотного диапазона. Ранее способ формирования обратной связи для предшествующих модификаций молекулярно-электронных датчиков представлен в работах [20, 21]. Однако попытки применить тот же подход к датчику с дополнительной инерционной массой не дали желаемых результатов, а именно, устойчивость контура управления удалось обеспечить только при небольшой глубине обратной связи, превышающей единицу в достаточно узкой полосе частот.
На рисунке 2 представлена общая схема контура обратной связи. Согласно данной схеме, контур функционирует следующим образом. Внешний сигнал воздействует на сенсор, выход которого подключен к блоку электронной коррекции прямой цепи. Выход с этого блока является одновременно выходом прибора, а также подается на вход корректирующей электроники обратной цепи. Выходной сигнал электроники обратной цепи управляет током в катушке обратной связи, создающей на сенсор воздействие, компенсирующее внешний сигнал.
Передаточная характеристика прибора с обратной связью может быть представлена в виде:
Wtotai =
W sensor
^Wfeedforward
1 + Wsensor WfeedforwardWfeedback К coil
Здесь Wsensor ,Wfeedforward ,Wfeedback, Kcoii — соответственно передаточные характеристики сенсора, корректирующей электроники прямой и обратной цепей, силовая постоянная катушки обратной связи, т.е. коэффициент, связывающий ток через катушку с создаваемой силой.
Для моделирования передаточной характеристики сенсора воспользуемся выражением из [22]:
Wsensor
iw
К
—w2 + w0 + 2iwwod (1 + iw/wD )(1 + iw/we)1/2
Здесь шо — собственная частота колебаний механической системы, d — безразмерное демпфирование, шр, ше — характерные частоты молекулярно-электронного преобразующего элемента [22]. Коэффициент К определяет чувствительность первичного преобразующего элемента. Для дальнейшего анализа будем учитывать, что обычно для интересующего нас применения в сейсморазведке является ситуация, когда выполнены соотношения шр,ше < Шо.
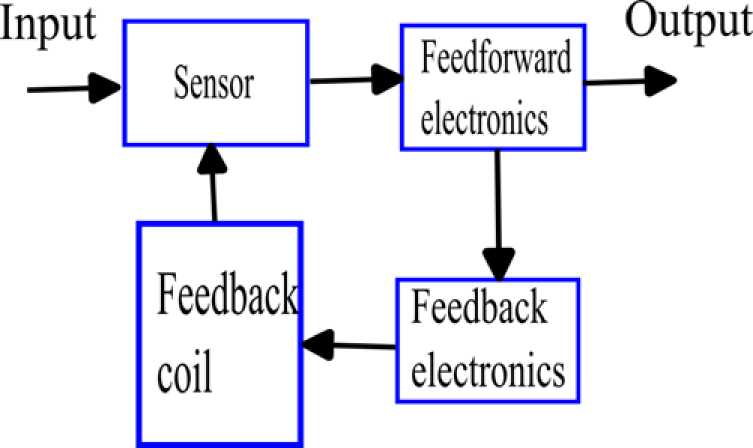
Рис. 2. Контур обратной связи молекулярпо-электроппого сейсмического датчика
Для моделирования корректирующей электроники рассмотрим два возможных варианта формирования сигнала обратной связи.
-
1) Электроника прямой цепи представляет собой дифференциатор в диапазоне частот от Шffl до Шffh, а электроника обратной связи также является дифференциатором, но в диапазоне от Шfbl До Шfbh■ Передаточные характеристики этих каскадов будут заданы следующими выражениями:
^Vfeedforward —
1 + iш/шffl
1 + iш/шffh,
^Vfeedback —
1 + ш/ш^1
1 + iш/Шfbh ’
-
2) Электроника прямой цепи представляет собой два дифференцирующих каскада для диапазонов частот от Шffl до Шffh и Шfbl до Шfbh, а передаточная характеристика электроники обратной связи не зависит от частоты и равна единице:
1 + iш/шffl 1 + iш/шffl1
' eedforward — 3 , : 7 • т. , : 7 ,
1+ ZU/Uffh 1+ ZU/Uffh1
Wfeedback — 1-
Отметим, что для рассматриваемых вариантов усиление контура обратной связи, т.е. произведение WSenSorWfeedforwardWfeedbackKcoii будет одинаковым, если выполнено условие Шfbl — Шffl1, Шfbh — Шffh1■ Однако полные передаточные функции Wtotai (1) будут различаться.
Для вычислений были выбраны следующие параметры: шо — 1, d — 0.5, шр — 0.01, шe — 0.1, что качественно соответствует характеристикам реальных сенсоров. Считаем ш f fi = 1, ш fbi = ^ ff и = 2. Также для всех цепей корректирующей электроники предполагалось, что верхняя частота диапазона, в котором происходит дифференцирование, превышает нижнюю границу в десять раз, т.е.
шfЬh = 10шfЫ, Uffh = 1°Uffl , Uffhl = 10wffl1.
Такое предположение накладывает существенные ограничения на возможности коррекции характеристик, но оправдано тем, что более широкий диапазон частот дифференцирования сигнала в одном корректирующем звене означает существенное усиление высоких частот и, для некоторых схемотехнических реализаций каскадов, может приводить к неустойчивой работе корректирующих электронных цепей. Относительно небольшой частотный диапазон, в котором производится дифференцирование сигнала, гарантирует устойчивость каждого звена контура обратной связи.
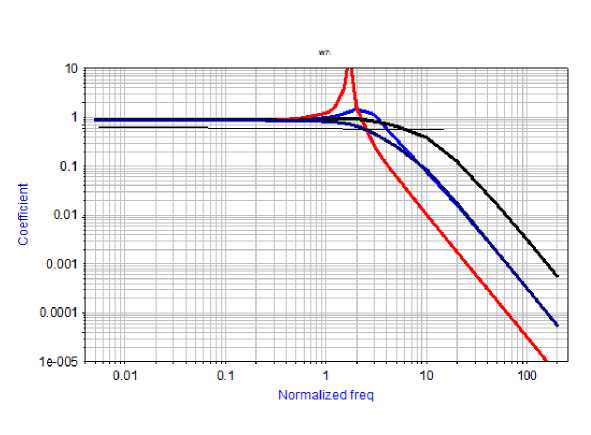
Рис. 3. Расчетные амплитудно-частотные характеристики датчиков с обратной связью: без корректирующей электроники (красная кривая), с одним корректирующим звеном [21] (голубая кривая); с двумя корректирующими звеньями согласно варианту 1 (темпо-синяя кривая); с двумя корректирующими звеньями согласно варианту 2 (черпая кривая)
Результаты расчета приведены на рис. 3, 4, 5. На всех рисунках красным цветом показаны кривые, относящиеся к ситуации, когда корректирующие цепи не используются, и выходной сигнал сенсора напрямую определяет ток в катушке обратной связи. Светлосиняя кривая отвечает ситуации, когда используется только один корректирующий дифференцирующий каскад в прямой цепи, т.е. ситуация, исследованная для предшествующих модификаций молекулярно-электронных сенсоров в работах [21-23], а описанные выше — двум вариантам формирования контура обратной связи соответствуют темно-синяя (вариант 1) и черная кривые (вариант 2). На рисунке 3 представлена расчитанная на основании принятой модели частотная характеристика сенсора с обратной связью. На рисунке 4 — амплитудно-частотная характеристика усиления цепи обратной связи, а на рис. 5 — годограф петли обратной связи. Отметим, что, как следует из рис. 4, для выбранных параметров расчетные кривые практически совпадают между собой для частот ниже собственной частоты колебаний механической системы датчика шо, т.е. максимальная глубина обратной связи одинаковая для рассматриваемых случаев. Из рисунка 3 видно, что АЧХ контура без применения корректирующих цепей (красная кривая) имеет сильно выраженный пик на частотах несколько выше частоты резонанса. При этом годограф (рис. 5) оказывается довольно близко к точке (-1, 0), хотя и не охватывает ее (рис. 5, правая сторона), что означает предельно малый запас устойчивости и возможность перехода в режим автоколебаний при минимальном изменении характеристик системы, например, в переходных режимах при включении питания.
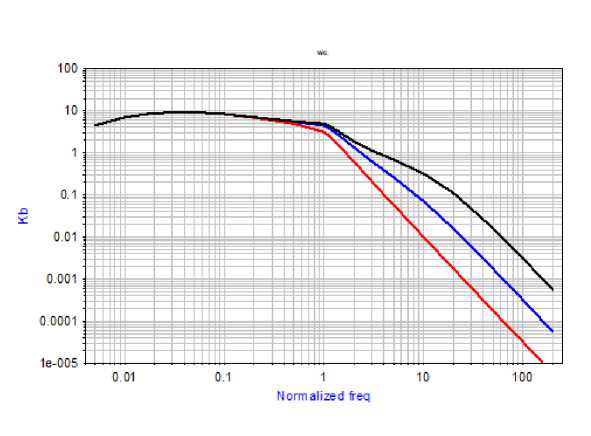
Рис. 4. Расчетные кривые для глубины обратной связи: без корректирующей электроники (красная кривая), с одной корректирующей цепью [21] (голубая кривая), с двумя корректирующими цепями согласно варианту 1 и варианту 2 (черпая кривая)
Для других способов формирования обратной связи, как следует из поведения годографа (рис. 5), системы оказываются устойчивыми. При этом рабочая полоса частот, в которой спад АЧХ относительно номинального значения в столообразной части характеристики составляет —3 дБ (показан на рис. 1 тонкой черной линией), для темно-синей кривой примерно вдвое превышает щд, а для голубой - в 4 и 6 раз соответственно. Отметим также немонотонность характеристики с одним корректирующим звеном (голубая кривая).
а) б)
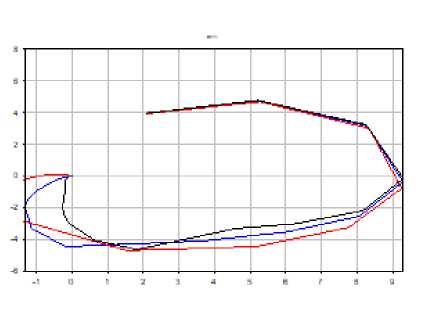
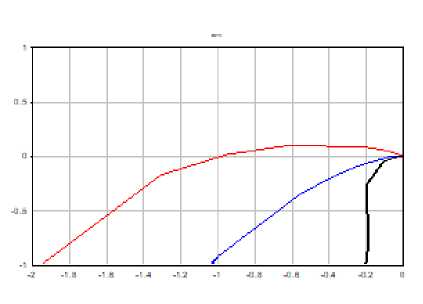
Рис. 5. Годограф: без корректирующей электроники (красная кривая); с одной корректирующей цепью [21] (голубая кривая); с двумя корректирующими цепями согласно вариантам 1 и 2 (черпая кривая). Справа в увеличенном масштабе показан ход годографа вблизи критической точки (—1,0)
Дополнительно обратим внимание, что годограф, соответствующий схемам обратной связью с двумя корректирующими звеньями, принципиально не пересекает отрицательную действительную полуось, что означает возможность многократного усиления обратной связи без потери устойчивости системы. Обобщая результаты моделирования, можно прийти к заключению что при формировании обратной связи с использованием одного корректирующего звена возможно обеспечить устойчивость системы и расширить частотный диапазон. При этом полученная АЧХ имеет немонотонный характер, что может приводить к замет- ным фазовым искажениям сигналов. Использование двух корректирующих цепей позволяет получить монотонно изменяющиеся АЧХ. Расширение частотного диапазона более значительно, если оба корректирующих звена расположены в прямой цепи обратной связи. Также при использовании двух корректирующих звеньев имеется возможность дальнейшего усиления обратной связи и еще более значительного расширения частотного диапазона.
-
4. Практическая реализация контура обратной связи для
молекулярно-электронного сейсмодатчика с дополнительной инерционной массой
Для практической реализации был выбран подход формирования обратной связи согласно представленному выше в теоретическом разделе варианту 1, при котором одна корректирующая цепь находится в прямой, а другая - в обратной цепи контура обратной связи. Такой выбор не является оптимальным согласно представленным выше расчетам, но несколько проще реализуется на практике, поскольку вторую корректирующую цепь можно совместить с драйвером выходного тока в катушке обратной связи, что позволяет уменьшить общее количество используемых в электронике операционных усилителей.
Измерение АЧХ-датчиков проводилось с использованием катушки обратной связи согласно широко используемому методу электродинамической калибровки характеристик [24]. Полученная таким образом АЧХ, нормализованная на свое максимальное значение, представлена на рис. 6. Использование нормализованной характеристики обусловлено тем, что при электродинамическом методе коэффициент преобразования зависит от используемой электродинамической системы магнит-катушка и его абсолютные значения не характеризуют исследуемый сейсмодатчик.
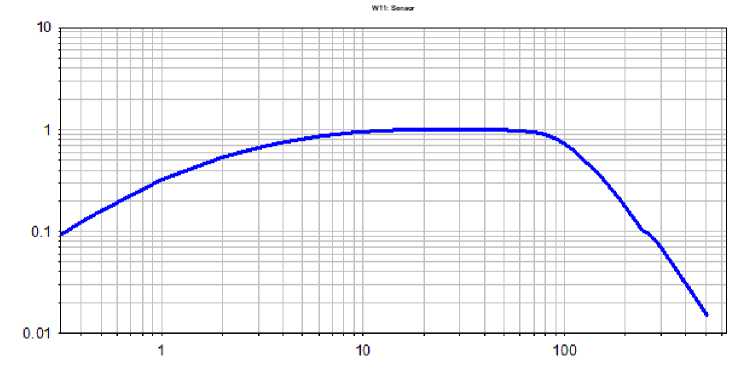
Рис. 6. Нормализованная АЧХ сейсмического датчика, без учета влияния корректирующих звеньев
Из приведенного графика видно, что спад характеристики заметно усиливается на частотах выше 80 Гц. Согласно формуле (1), такое поведение согласуется с предположением, что собственная частота механических колебаний близка к 80 Гц, а демпфирование не сильно отличается от критического значения d = 0 .7. Характерные частоты дифференцирующих звеньев были установлены согласно данным моделирования 80 Гц и 160 Гц -для нижних частот и 800 и 1600 Гц - для верхних частот. Результирующая кривая для АЧХ-контура обратной связи и соответствующий годограф приведены на рис. 7 и 8 соответственно.
Из представленных графиков видно, что глубина обратной связи в основной части исследованного частотного диапазона превышает 10, а годограф, согласно критерию Михайлова, соответствует устойчивому поведению обратной связи.
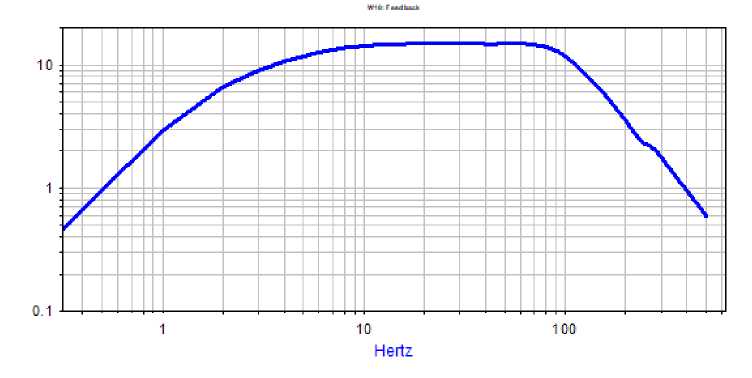
Рис. 7. Глубина обратной связи для экспериментального образца после использования корректирующих звеньев
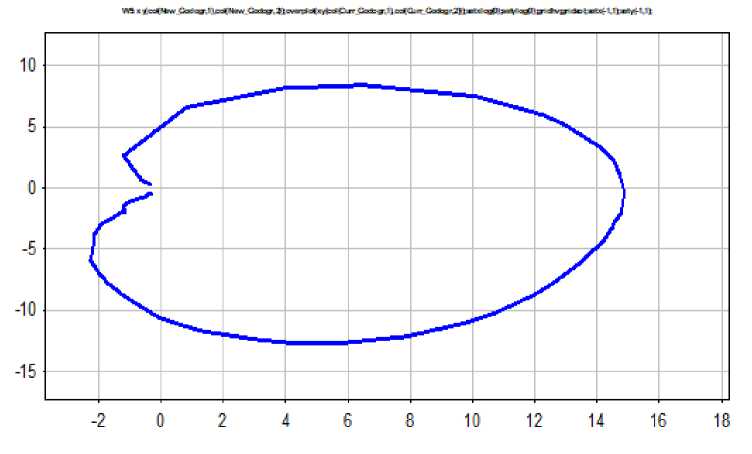
Рис. 8. Годограф для исследованного экспериментального образца
Окончательная проверка полученной частотной характеристики проводилась путем совместной параллельной регистрации фонового сейсмического сигнала экспериментальным образцом и акселерометром Fortis (Guralp) [25]. Данные регистрировались в течение 12 часов, затем полученная запись разбивалась на участки длиной 128 секунд и для каждого участка вычислялись спектральные мощности сигналов. Полученные спектры усреднялись. На рисунке 9 представлено наложение спектров для акселерометра Fortis (красная кривая) и исследованного образца (синяя кривая). Из приведенных данных видно, что полученные спектры полностью согласуются между собой на частотах до 400 Гц. Различие спектров вблизи 1 Гц обусловлено более низкими собственными шумами исследуемого образца по сравнению с референсным акселерометром, а на еще более низких частотах -спадом характеристики экспериментального образца, выходной фильтр которого был настроен на частоту 1 Гц.
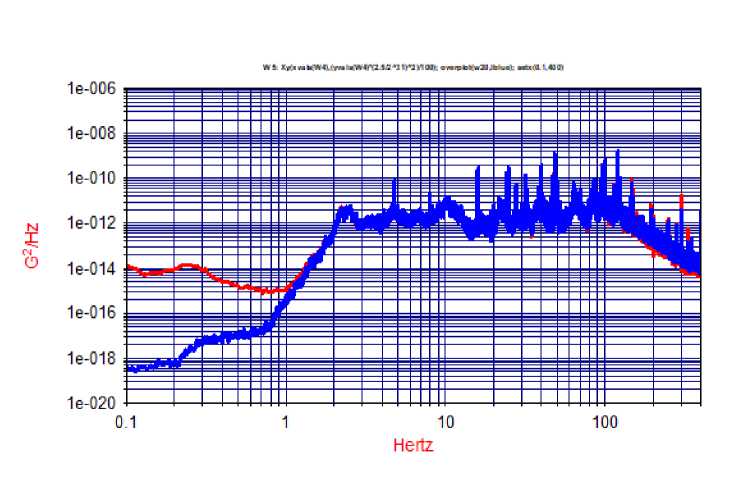
Рис. 9. Сравнение спектров исследованного экспериментального образца с обратной связью (синяя кривая) и референсного акселерометра (красная кривая)
5. Заключение
Таким образом, в данной работе разработан метод формирования глубокой обратной связи для молекулярно-электронного датчика с дополнительной инерционной массой. Принципиальной новизной этого датчика с точки зрения частотного поведения контура обратной связи по сравнению с ранее исследованными аналогами является то, что собственная частота его механической системы оказывается в рабочем частотном диапазоне, а демпфирование ниже, чем у аналогичных приборов, не содержащих дополнительной массы. Методами моделирования установлено, что устойчивость контура гарантированно достигается при использовании в его составе двух дифференцирующих звеньев. При этом максимальное расширение частотного диапазона может быть получено при условии размещения звеньев в прямой ветви обратной связи.
Практическая апробация разработанного метода формирования контура обратной связи продемонстрировала, что рабочая полоса частот действительно расширяется, как минимум, в 5 раз по отношению к резонансной механической системе, а полученные частотные характеристики подтверждаются сравнительными записями с референсным прибором. При этом собственные шумы датчика, включая шумы электроники контура обратной связи, оказываются на частотах близи 1 Гц менее уровня 2 • 10-8 g/уТц, что соответствует и превосходит параметры самых лучших электромеханических аналогов.
Работа выполнена при поддержке Российского Научного Фонда, проект № 22-69-00231,
