Построение векторных моделей с использованием промежуточных аргументов

Автор: Косенок Борис Борисович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-3 т.15, 2013 года.
Бесплатный доступ
Приведены основы метода математического моделирования, сделано обоснование необходимости развития метода в сторону решения более сложных моделей на основе построения векторных моделей с использованием промежуточных аргументов. В данном исследовании также приводятся примеры применения подобных моделей.
Вектор, контур, модель, модули, инвариантность, промежуточные аргументы
Короткий адрес: https://sciup.org/148202621
IDR: 148202621 | УДК: 621.01
Building vector models using intermediate arguments
The foundations of the method of mathematical modeling, made the rationale for development of the method in the direction of solving more complex models based on building vector models using intermediate arguments. This study also provides examples of the use of such models.
Текст научной статьи Построение векторных моделей с использованием промежуточных аргументов
Метод математического моделирования векторных замкнутых контуров достаточно подробно освещен в работах [1, 2], и успешно применяется для моделирования механизмов, применительно к задачам анализа и синтеза, а в более широком смысле и композиции механизмов (синтеза структурной или кинематической схемы механизмов обеспечивающих требуемую передаточную функцию). Основу метода составляют векторные замкнутые контуры, состоящие из отдельных векторов. Вектор – это направленный отрезок с параметрами r и а i (рис. 1).
Известно, что любую структурную схему механизма можно отобразить векторным контуром (рис. 2).
Подобные векторные замкнутые контуры можно привести к виду элементарных векторных замкнутых контуров – модулей, с заранее известными и подробно описанными решениями, определяемые из условий замкнутости векторных контуров (1) и (2).
Условие замкнутости m -векторного контура на плоскости:
mm
^ ri cos ai = 0; ^ ri sin ai = 0.
i=1
Условие замкнутости m -векторного контура в пространстве:
m
m
^ r i cos a i cos P i = 0 ; ^ r i sin a i = 0
im1i
^ r i cos a i sin p i = 0 .
i = 1
Основные сочетания функций возможных векторных контуров исходя из условия замкнутости определяют четыре плоских элементарных Косенок Борис Борисович, кандидат технических наук, доцент кафедры основ конструирования машин.
модуля(Пл1-Пл4)) и двадцать пространственных (Пр1-Пр20) [1]. Это позволяет строить систему векторных контуров, достаточно простым методом подбора требуемых модулей.
Построенная на основе модулей основная векторная модель позволяет получить решение определенных функций, с известными для каждого момента времени аргументами модели и связями между отдельными векторами и контурами.
Простые векторные модели, состоящие даже из множества векторных контуров, позволяют решать, например, задачи теории машин и механизмов в рамках анализа и синтеза механизма, но не позволяют решать все задачи моделирова ния, которые стоят перед проектировщиками.
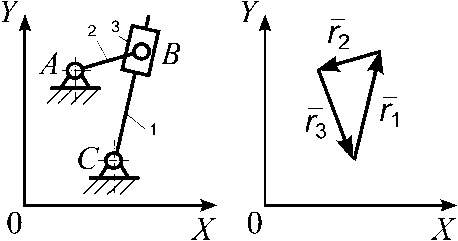
Рис. 2. Структурно схема(а) и векторная модель(б) механизма
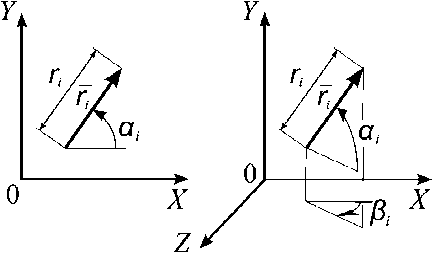
Рис. 1. Параметры плоского и пространственного вектора
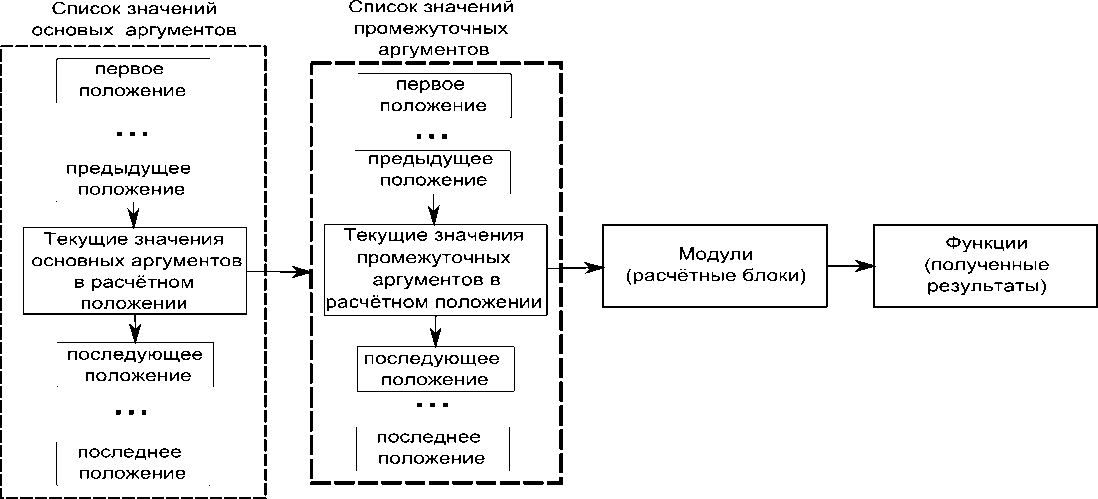
Рис. 3. Схема расположения промежуточных аргументов в системе расчета векторных модулей
Различные задачи исследования и проектирования механических устройств, привели автора к необходимости использовать инвариантность векторных моделей в моделировании более сложных объектов – различных траекторий, площадей, объёмов и т.д., что и было найдено с введением новых расчетных векторных моделей с использованием так, называемых промежуточных аргументов.
В общем случае, промежуточные аргументы -это аргументы или изменения параметров вектора для построения нескольких положений векторной модели в одном положении основных аргументов. Тем самым, как бы проводится изменение векторной модели не только от одного положения к другому (от одного значения основных аргументов к другому), но и изменение векторной модели в одном положении (от одного значения промежуточных аргументов к другому) (рис. 3).
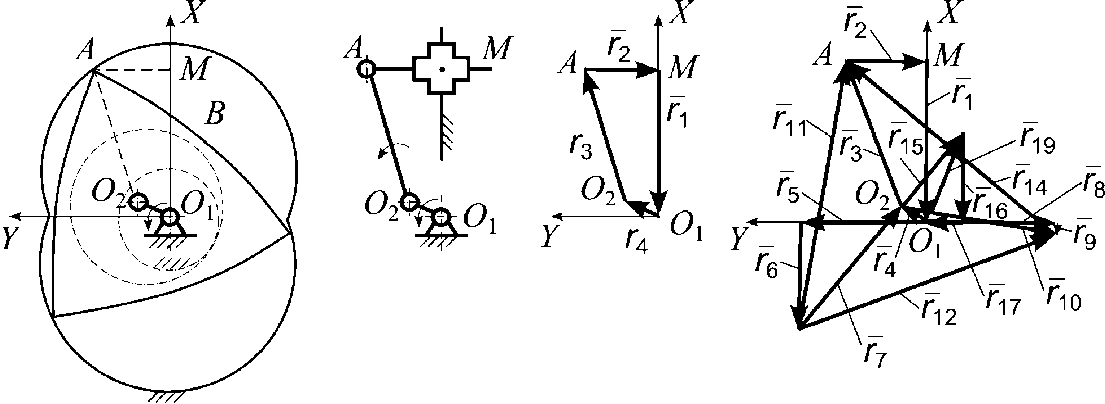
Например, роторно-поршневой двигатель (РПД) Ванкеля можно смоделировать с помощью векторного моделирования, так, как приведено на рис.4.
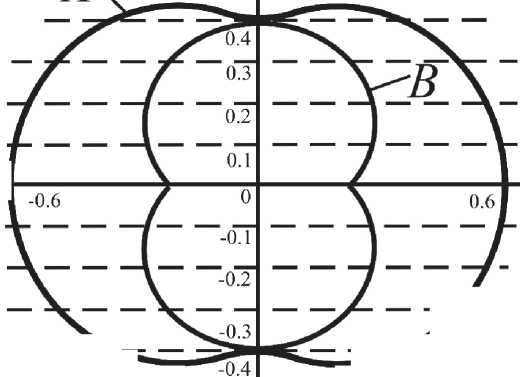
Простейшая векторная модель моделирует отображенная на рис. 4.в моделирует движение точки А, в то время, как расширенная модель, отображённая на рис. 4.г позволяет строить профиль камеры сгорания роторного двигателя в каждый момент времени.
Принципиальная разница этих моделей, состоит не в сложности второй относительно первой, а в том, что для описания движения составных частей двигателя в векторной модели (рис. 4.в) используются основной аргумент, описывающий изменение поворота ротора двигателя во времени и этого достаточно для проведения кинематического исследования РПД Ванкеля, в то время как, в расширенной векторной модели (рис. 4.г)
а) б) в)
г)
Рис. 4. Конструктивно-структурная схема(а) РПД Ванкеля и замещающая рычажная схема(б), его векторная модель (в) и расширенная векторная модель(г)
возможностью непосредственного соединения с
|
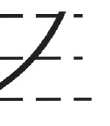
\ 0.4352 6^ / _ _ _\o£X _ / 1 02 1 I -o.6 ! о д 06L T 1 01 1 / "X^ \ "°2 / / -0.43526 Рис. 5. Траектории движения точек A и B векторной модели РПД используются промежуточные аргументы, позволяющие строить как движение характерных точек А и В(описывающих, как движение ротора в корпусе), так и множества точек принадлежащий внутреннему профилю корпуса двигателя(рис. 5). Построение полной траектории данных точек в каждом расчетном положении, необходимо для решения задачи нахождения объема рабочей камеры двигателя, что требуется для построения индикаторной диаграммы давления в рабочей камере, которое в свою очередь необходима для проведения исследования динамического поведения двигателя. Удобство работы с промежуточными аргументами заключается и в том, что плотность точек описывающих площадь камеры сгорания, можно легко уменьшать или увеличивать, то есть оперативно изменять точность в процессе работы с моделью, что проистекает из параметрической основы векторных моделей. Ещё один пример применения векторных моделей с промежуточными аргументами относится к расчетам шестеренных насосов. Шестеренные насосы (рис. 6) обладают простотой конструкции, малой трудоемкостью изготовления, сравнительно небольшими габаритами и массой, П I Г AW, Ate 1 . i' ) \ i -Х-XXL/’ —U --V^^-------J-------х=^ц=^-------k-^x--- ХжХ- - ^— Рис. 6. Схема шестеренного насоса |
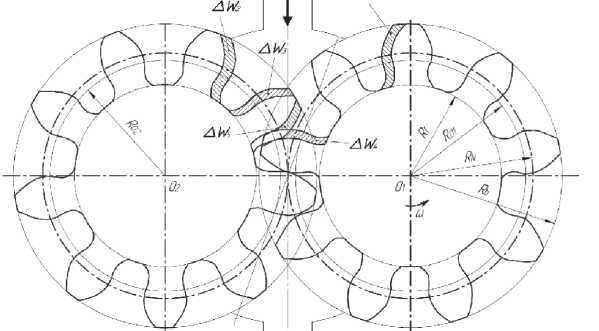
быстроходными двигателями. В тоже время к недостаткам шестеренных качающих узлов следует отнести чувствительность к механическим примесям в перекачивающей жидкости; рост зазоров в процессе эксплуатации, вызывающий увеличение утечек; неравномерность подачи жидкости и высокий уровень акустического шума. Для снижения интенсивности колебательных и кавитационных процессов необходима разработка методов оперативного и адекватного учета кинематической подачи жидкости при измененной геометрии профиля зубьев насоса. В рамках разработки методики анализа и диагностики пульсаций подачи жидкости шестеренным насосом была создана математическая модель зубчатого зацепления сопрягаемых поверхностей на базе векторной модели с промежуточными аргументами (рис. 7). Более подробно разработка и проверка как самого метода, так и векторной модели освещены в статьях [3, 4]. Результаты эксперимента по проверке новой методики анализа и диагностики пульсаций подачи жидкости шестеренным насосом приведены на рис. 8. Сравнение по среднеквадратичному значению амплитуд пульсаций Рис. 7. Векторная модель, описывающая отдельный зуб шестерни 400 p----T------T--------------T------T------т------- Я 200 \ \ \ \ - “ A A A A i "&z ж'жж \ t^-200 F ‘ f -4001----------1----------1----------1-------—1----------1----------1----------IO3 0 2 4 6 8 10 12 14 Время, c ------ Предлагаемая мидель — — Эксперимент ■ • ■ — Традиционная модель Рис. 8. Результаты эксперимента |
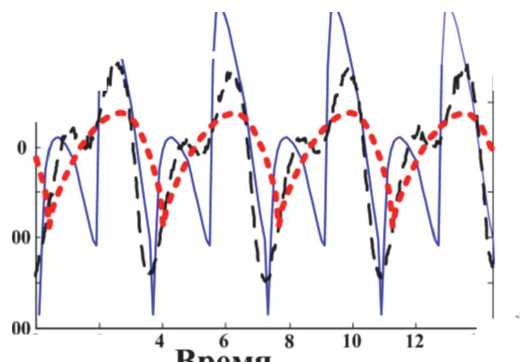
давления предлагаемой и ранее существующей моделей с экспериментом показало, что предлагаемая модель точнее существующей на 25-30% в зависимости от режима работы шестеренного насоса.
Использование векторных моделей с промежуточными аргументами и в этом случае дали возможность простыми методами и трудозатратами наглядно и быстро решить задачу построения и взаимодействия различных деталей насоса.
При выполнении работ в рамках исследований [5, 6] автором статьи была предложена векторная модель воспроизводящая кинематику шариков подшипника качения.
В опорах авиационных газотурбинных двигателей для восприятия осевых и радиальных нагрузок применяются шариковые подшипники. Величины нагрузок существенно зависят от режима работы двигателя. Величина радиальной нагрузки определяется весом ротора и величиной дисбаланса, а величина осевой - разностью газодинамических сил компрессора и турбины. Для обеспечения нормальной работы необходимо знать влияние изменения геометрии подшипника и его составных частей, а также нагрузок на динамику подшипника. Схема усилий в контактах с учетом центробежных сил шариков при двухточечном контакте приведена на рис 9.
Для подобного анализа предложена векторную модель точек контакта колец и шарика подшипника качения (рис. 10), полная векторная модель с использованием промежуточных аргументов представлена на рис. 11.
В эксперименте описанном в работе [6] оценивалось радиальное перемещение внутреннего кольца подшипника относительно наружного при
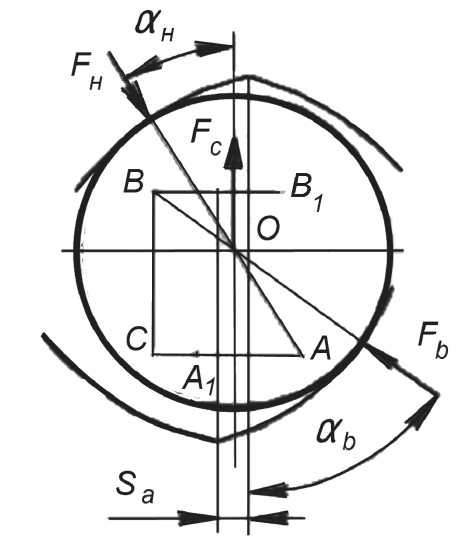
Рис. 9. Схема усилий в контактах шарика с учетом центробежных сил

Рис. 10. Векторная модель точек контакта колец и шарика подшипника качения
различных уровнях нагрузки радиальной и осевой силой для нескольких значений оборотов ротора. Радиальная нагрузка на подшипник складывалась из веса ротора и динамической нагрузки от его дисбаланса. Сравнивая результаты полученные экспериментально с расчетными можно говорить о том, что погрешность не превышает 15-20 % (рис. 12).
Приведённые примеры использования векторных моделей с промежуточными аргумента-
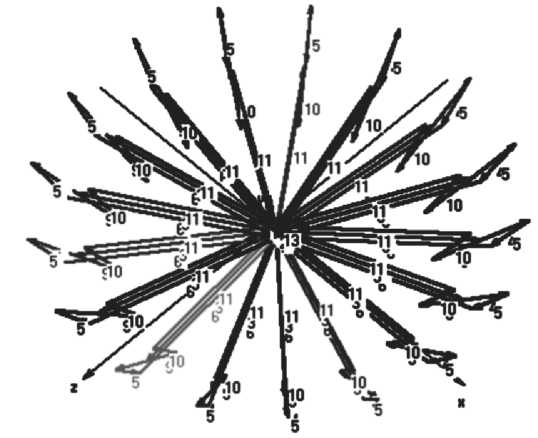
Рис. 11. Полная векторная модель подшипника качения
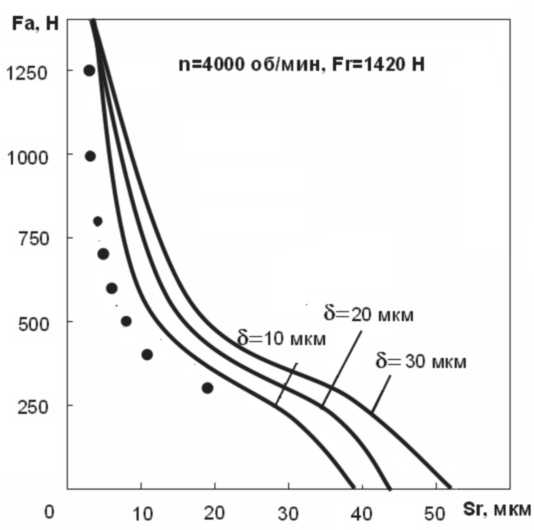
Рис. 12. Осевые усилия на подшипник ми, показывают, что такие параметрические векторные модели с одной стороны, обладают достаточной простотой и позволяют оперативно добиваться нужной точности вычислений (увеличивая или уменьшая шаг промежуточных и основных аргументов модели), а с другой, при описании сложных траекторий, поверхностей, и объёмов, обладают визуальной наглядностью, и являются системой ранее отлаженных расчётных блоков (модулей), что позволяет обеспечивать надежность полученных результатов. Использование промежуточных аргументов позволяет использовать векторные модели как для решения основных задач, так и для расчета вспомогательных задач, в рамках единой расчётной модели.
Список литературы Построение векторных моделей с использованием промежуточных аргументов
- Семёнов Б.П., Тихонов А.Н., Косенок Б.Б. Модульное моделирование механизмов. [Текст] / Самара: СГАУ, 1996.
- Семенов, Б.П., Косенок Б.Б. Методы и средства динамического синтеза механизмов авиационных энергоустановок [Текст]/Самара: Самарский научный центр РАН, 2010. -281 с.
- Косенок, Б.Б. Разработка методики моделирования зубчатых передач на основе метода математического моделирования векторных замкнутых контуров. [Текст] / Известия Самарского научного центра Российской академии наук. -Самара, 2009, том 11, №3. -С. 202-204.
- Крючков, А.Н., Косенок Б.Б., Родионов Л.В., Шахматов Е.В. Математическое векторное моделирование неравномерности подачи жидкости шестеренным качающим узлом [Текст] / Известия Самарского научного центра Российской академии наук. -Самара, 2009, том 9, №3. -С. 257-262.
- Балякин, В.Б., Жильников Е.П., Барманов И.С., Косенок Б.Б. Динамика шарикового радиально-упорного подшипника качения [Текст] / Известия Самарского научного центра Российской академии наук. -Самара, 2010, том 12, №4. -С. 144-150.
- Балякин В.Б., Жильников Е.П., Косенок Б.Б., Барманов И.С., Лёжин Д.С. Экспериментальные исследования динамики радиально-упорного авиационного подшипника [Текст] / Известия Самарского научного центра Российской академии наук. -Самара, 2011, том 13, №4. -С. 160-162.
