Потери в регулируемых электроприводах при разных законах управления

Автор: Усынин Ю.С., Григорьев М.А., Шишков А.Н., Виноградов К.М., Горожанкин А.Н., Бычков А.Е.
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 14 (190), 2010 года.
Бесплатный доступ
Для электродвигателей разного типа (асинхронных, синхронных, постоянного тока, реактивных) и разными законами управления приведены обобщённые зависимости изменения соотношения составляющих потерь при изменении момента нагрузки.
Электрические потери, синхронный электропривод, асинхронный электропривод, электропривод с синхронной реактивной машиной независимого, электропривод постоянного тока, возбуждения
Короткий адрес: https://sciup.org/147158097
IDR: 147158097 | УДК: 62-83:
Power losses in the variable-speed electric drives at different control laws
Power losses at load moment change for the different types of electric motors (induction, synchronous, direct current, reaction motors) and with different control laws are given.
Текст научной статьи Потери в регулируемых электроприводах при разных законах управления
Введение. Работа современного регулируемого электропривода, как правило, происходит при переменной нагрузке и с разными законами регулирования момента и скорости. Это приводит к перераспределению составляющих потерь и требует их учёта. Ниже сопоставлен характер изменения общих потерь и их составляющих в электроприводах разного типа при изменении нагрузки.
Исходные данные для анализа. В основу анализа положено наблюдение, которое заключается в том, что у двигателей, имеющих близкие значения КПД, характер изменения составляющих потерь также близок, хотя при этом абсолютные потери могут отличаться весьма значительно. Этот факт дал возможность при изменении нагрузки представить изменение составляющих потерь в относительных единицах, взяв за базовое значение суммарные потери в электродвигателе в номи нальном режиме. При этом внутри каждой серии электродвигателей абсолютные потери могут отличаться и весьма значительно.
Результаты расчётов. В двигателях постоянного тока, в которых номинальный КПД находится в пределах 0,8...0,95, на основании обзора нескольких десятков клиентских формуляров [1] можно предложить следующие усреднённые относительные значения составляющих потерь в номинальном режиме работы двигателя:
ДР, = АР. + АР = АРЯК + ДРкодп + АРдоб +
"^"^^колл + ^^стапи + ^^тр + ^^возб —
= 0,25 + 0,2 + 0,05 + 0,06 + 0,25 + 0,2 + 0,1 = 1, где ДРЯК - потери в обмотке якоря; АРК0ДП - потери в обмотках компенсационной и добавочных полюсов; АРдоб - добавочные потери; АРК0ЛЛ - потери на коллекторе; АРстали - потери в стали; АРтр - потери на трение и вентиляцию; АРвозб -потери на возбуждение.
В тех случаях, когда двигатель постоянного тока работает в регулируемом электроприводе при неизменном токе возбуждения, переменные потери можно описать так:
А^~=АРяк+ДРкодп=0,45-М2, т. е. считать их пропорциональными квадрату относительной величины момента нагрузки.
Постоянные потери
АР — АРдод + АРК0ЛЛ + АРстали + АРТр + АРВО35 =
= 0,45 = Const.
Зависимость суммарных потерь от момента нагрузки описывается кривой 1 на рис. 1.
В тех случаях, когда регулируемый электро привод работает в перемежающемся режиме S6, то с целью снижения потерь в электроприводе при нагрузках меньших номинальных снижают ток возбуждения двигателя, как правило, пропорционально току якоря. В этом случае наблюдается перераспределение потерь между составляющими:
Д^- = Д^як + Д^ко + Д^возб + Достали = 0,8 • А/.
Суммарные потери описываются кривой 1 на рис. 2.
В синхронных двигателях (СД) обзор клиентских формуляров [1] дал следующие приближённые соотношения для составляющих потерь в номинальном режиме:
АР^ — АРстали + ^як + ^доб + АРтр + ^^возб ~
= 0,23 + 0,25 + 0,1 + 0,2 + 0,22 = 1.
Здесь АРстали - потери в стали; АРтр - потери на трение и вентиляцию; АРЯК - потери в меди
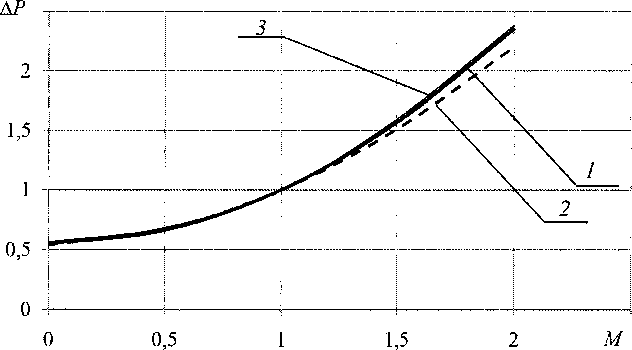
Рис. 1. Зависимость суммарных потерь от момента нагрузки:
1 - в двигателе постоянного тока при постоянном возбуждении; 2 - в СД при постоянном магнитном потоке; 3 - в асинхронном двигателе при постоянном магнитном потоке
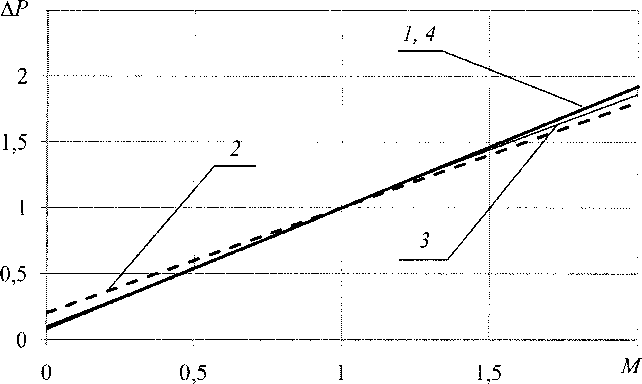
Рис. 2. Зависимость суммарных потерь от момента нагрузки:
1 - в двигателе постоянного тока при последовательном возбуждении;
2 - в СД при регулируемом возбуждении; 3 - в асинхронном двигателе при постоянном скольжении; 4 - в СРМНВ при регулируемом токе возбуждения
статора; АРдоб - добавочные потери; АРвозб - потери на возбуждение.
Очень эффективным по своим регулировочным характеристикам считается способ формирования момента в СД, при котором поддерживается постоянство результирующего потока, равного номинальному значению, а также ортогональность пространственных векторов МДС статора и результирующего потокосцепления [2, 3]. В этом случае достигается пропорциональность между током статора и момента, а косинус угла сдвига между векторами фазных напряжений и тока статора СД равен единице.
В ранних схемах векторного регулирования [2] формирование момента осуществлялось воздействием на величины токов статора, ротора и пространственный угол между МДС, создаваемыми этими токами. В более поздних разработках, в частности, фирма АББ [4] предпочитает формировать момент воздействием на величины результирующего потока (точнее - его оценки) и тока статора при ортогональности между этими пространственными векторами.
При описанном законе формирования момента составляющие потерь в меди статора:
АРЯК = 0,25-М2.
Потери на возбуждение ротора также следует отнести к переменным, так как ток возбуждения (в долях от номинального значения) регулируется, подчиняясь закону:
где /с - относительное (в долях от номинального) значение тока статора.
Постоянные потери в этом случае:
АРпост * АЛр + Достали ” 0,43 = const.
Зависимость суммарных потерь в СД описывается кривой 2 на рис. 1.
Чтобы снизить потери в СД при нагрузках менее номинального значения, обычно снижают ток возбуждения пропорционально току статора [5].
В этом случае переменные потери:
= А^як + АРвозб + Ацетали ” 0,8 - М, а к постоянным потерям следует отнести лишь механические потери:
АЛюст = АЛр = 0,2 = const.
График суммарных потерь в этом случае соответствует кривой 2 на рис. 2.
Распределение составляющих потерь в асинхронных электроприводах принималось таким же, как предлагалось фирмой АББ для асинхронных двигателей повышенной энергоэффективности [6].
Здесь
АР£ = АРЯ + АРстали + АРрот + АРдоб + АРтр =
= 0,34 + 0,18 + 0,24 + 0,14 + 0,1 = 1.
В приведенном выражении АРЯ - потери в меди статора; АРстали - потери в стали; АРрот -потери в роторе; АРдоб - добавочные потери; АРтр - потери на трение и вентиляцию.
Когда регулирование момента производят при постоянном магнитном потоке двигателя, то к переменным потерям следует отнести потери в меди статора NPa = 0,34-/^ и АРрот = 0,24-/2 ротора, где 1Х и /2 - токи статора и ротора в долях от их номинальных значений.
Постоянные потери могут быть приняты равными:
АРпост = АРстали + АРдоб + АРтр = 0,43 = Const.
Суммарные потери при изменении момента нагрузки для асинхронного двигателя, имеющего в номинальном режиме соотношение токов статора Ix = 1, ротора /2 = 0,8, и намагничивания /м = 0,6, описываются кривой 3 на рис. 1.
Когда регулирование асинхронного электропривода ведётся с минимумом потерь, то можно принять, что при изменении момента скольжение в двигателе оставляют неизменным, а токи статора, ротора и намагничивания изменяют в равных пропорциях [7]. В этом случае переменными потерями следует считать:
= АРя+АРрот+АРстали =
= 0,34-/2 +0,24-/2+0,18/р.
Здесь /15/2,/р - токи статора, ротора и намагничивания в долях от их значений в номинальном режиме двигателя. Постоянные потери
^пост = ^доб + ^мех ~ 0,24 = const .
График суммарных потерь характеризуется кривой 3 на рис. 2.
Высокими энергетическими и удельными показателями характеризуется электропривод с синхронной реактивной машиной независимого возбуждения (СРМНВ) [8], по западной терминологии -Field Regulated Reluctance Machine (FRRM) [9]. Поскольку авторы не располагали готовой информацией о составляющих потерь в этих электродвигателях, то был выполнен электромагнитный расчёт СРМНВ со следующими паспортными данными: Рн = 23,5 кВт, п^ = 1500 об/мин, [/н = 150 В, /фазы = 50 А, цн = 91 % . Этот расчёт дал следующие соотношения составляющих потерь
А^ = АРЯ + АРстали + АРрот + АР^ =
= 0,67 + 0,25 + 0,03 + 0,05 = 1.
В приведенном выражении АРЯ - потери в меди статора; АРстали - потери в стали; АРрот -потери в роторе; АРтр - потери на трение и вентиляцию.
Как правило, в СРМНВ токи якоря и возбуждения регулируют пропорционально друг другу [8], тогда составляющие Ы\ и АРстали следует отнести к переменным потерям, а АР^ и АР^ -к постоянным. В результате общая зависимость потерь:
АРЕ = АР~ + АР = 0,82-ЛГ+ 0,18.
Кривая 4 на рис. 2 соответствует этому случаю.
Обсуждение результатов. Двигатели общепромышленного исполнения, имеющие номинальный КПД в пределах цн =0,8...0,95, независимо от типа (синхронные, асинхронные, постоянного тока, реактивные) при изменении момента нагрузки имеют практически совпадающий характер изменения относительных значений постоянных и переменных составляющих потерь.
При регулировании скорости и(или) момента в электроприводах с поддержанием постоянства магнитного потока двигателя обобщённая зависимость суммарных потерь в долях от их значения в номинальном режиме двигателя может быть описана уравнением
ДР2 =0,57 + 0,43-М2, а в электроприводах, где ток возбуждения изменяют пропорционально току якоря:
АР2 =0,1 + 0,9-М.
Когда момент нагрузки близок к номинальному значению или не отличается от него в ту или иную сторону более чем на 50 %, то, как это следует из сопоставления кривых на рис. 1 и 2, суммарные потери при обоих способах регулирования магнитного потока отличаются незначительно. Заметная выгода при работе с регулируемым магнитным потоком наблюдается в зоне малых нагрузок, когда момент нагрузки М < 0,5 • Мн . Работу в зоне больших моментов при М > 1,5 • Мн также выгоднее выполнять при регулируемом магнитном потоке, но на практике это не всегда удаётся из-за возможного насыщения магнитной системы электродвигателя. Тогда приходится переходить на двузонное регулирование скорости или момента [3,7].
Список литературы Потери в регулируемых электроприводах при разных законах управления
- Альбом технических данных индивидуальных электрических машин для приводов прокатных станов: вторая редакция/под ред. А.И. Шейнмана, -М.: ГПИ «Тяжпромэлектроиз-дат», 1968. -363 с.
- Stemmber, Н. Antriebssystem und elektronische Regeleinrichtung der getriebelosen Rohrmuhle/H. Stemmber//Brown Boveri Mitt. -1970. -Bd 57. -№3. -S. 121-129.
- Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями/О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов и др. -М.: Энергоатомиздат, 1983. -256 с. 4.
- Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для вузов/Г.Г. Соколовский. -М.: Издательский центр «Академия», 2006. -272 с.
- Вейнгер, A.M. Регулируемый синхронный электропривод/A.M. Вейнгер. -М.: Энергоатомиздат, 1985. -224 с.
- Тиммер, Р. Эффективность электрического двигателя/Р. Тиммер, М. Хелинко, Р. Эскола//АББ Ревю. Энергоэффективность. -2007. -№ 2. -С. 81-84.
- Усынин, Ю.С. Системы управления электроприводов: учеб. пособие для вузов/Ю.С. Усынин. -Челябинск: Изд-во ЮУрГУ, 2004. -328 с.
- Усынин, Ю.С. Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электричество. -№ 3. -2007. -С. 21-26.
- Law, J.D. Design and Performance of Field Regulated Reluctance Machine/J.D. Law, A. Chertok, T.A. Lip о//IEEE Trans, on Industry Applications. -1994. -№5. -P. 1185-1193.
