Поворот тела без внешних движителей при помощи ротора

Автор: Сахаров А.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Космические исследования, механика
Статья в выпуске: 2 (22) т.6, 2014 года.
Бесплатный доступ
Рассмотрено твердое тело, обладающее полостью, на шероховатой плоскости. В качестве закона трения между телом и опорной плоскостью принимается локальный закон Амонтона-Кулона. Для определения контактных напряжений использовалась динамически совместная модель. Поворот тела на плоскости совершается благодаря вращению ротора внутри полости. При этом ротор располагается двумя способами: в вертикальной и горизонтальной плоскостях. Составлены и численно проинтегрированы уравнения движения тела.
Сухое трение, закон амонтона-кулона, динамически совместная модель, контактное напряжение
Короткий адрес: https://sciup.org/142186004
IDR: 142186004 | УДК: 531.384
Текст научной статьи Поворот тела без внешних движителей при помощи ротора
Рассматривается динамика, твердого тела. на. шероховатой плоскости. Отличительной особенностью исследуемой механической системы является отсутствие каких-либо внешних движителей, установленных на. твердом теле [1-5]. Движение тела, (далее ползуна) по плоскости планируется достигать за. счет определенного перемещения внутренних масс и наличия трения между плоскостью и ползуном.
Задачу реализации движения ползуна на плоскости за счет перемещения внутренних масс удобно разбить на. два. этапа: сначала, предлагается и обосновывается способ осуществления поступательного передвижения ползуна, затем рассматриваются различные способы его поворота на плоскости. Принципиальная возможность движения такой механической системы на шероховатой плоскости была доказана в [3].
Продольное передвижение ползуна, предлагается осуществлять с помощью периодического перемещения внутренней массы вдоль продольной оси симметрии тела [1-3]. При этом периодическое перемещение этой массы внутри ползуна разбивается на две фазы. Во время первой фазы масса, перемещается внутри полости с ускорением, которое позволяет преодолеть силу трения между ползуном и плоскостью. Таким образом, достигается перемещение ползуна, вдоль продольной оси симметрии. Во время второй фазы происходит возвращение внутренней массы в начальную позицию с ускорением, заведомо меньшим требующегося для преодоления силы трения. Внутренняя масса, вернется в исходную позицию внутри полости, однако обратного передвижения ползуна, не произойдет. Повторение этих двух фаз поочередно позволяет обеспечить поступательное продвижение тела.
Для осуществления поворота, ползуна, на. плоскости расположим внутри полости механический ротор. Ориентируем его двумя способами и обоснуем возможность поворота, ползуна, на. плоскости за. счет ускорения и замедления скорости вращения ротора, в каждом из способов.
-
1. Расположим ротор внутри полости так, чтобы ось его вращения была, параллельна. продольной оси симметрии ползуна, (рис. 1). Назовём такое расположение ротора. горизонтально-ориентированным или горизонтально-осевым. Ускоренное вращение ротора. (благодаря некоторому двигателю) приводит к появлению момента, силы направленного вдоль продольной оси симметрии ползуна. Наличие такого момента, означает, что распределение контактного напряжения между ползуном и плоскостью окажется несимметричным относительно продольной оси симметрии ползуна. Несимметричность контактного напряжения между телом и плоскостью в свою очередь приведет к асимметрии в силе трения, действующей между плоскостью и корпусом. Если ползун движется, например, благодаря
-
2. Расположим ротор внутри полости так, чтобы ось его вращения приняла, вертикальное положение (рис. 2). Назовём такое расположение ротора, внутри полости вертикальноориентированным или вертикально-осевым. Ускоренное вращение ротора приводит к появлению момента, силы, направленного вдоль вертикальной оси. Если этот момент окажется достаточным для преодоления силы трения, по инерции ползун совершит поворот в противоположную, относительно вращения ротора, сторону. Заметим, что в отличие от предыдущего случая поворот совершается не за. счет силы трения между ползуном и плоскостью, а за счет создания вертикального момента силы. Таким образом сила трения препятствует повороту ползуна. В этом состоит принципиальная разница, между указанными двумя способами поворота тела при помощи ускоренного вращения ротора внутри полости. Заметим также, что в отличие от предыдущего случая здесь нет необходимости в продольном передвижении ползуна: поворот достигается и в случае, если центр масс ползуна, покоится.
перемещению внутренней массы, асимметрия в силе трения приведет к появлению момента силы, направленного вдолв вертикальной оси, что обеспечит (при достаточно большом моменте силы) поворот ползуна на плоскости. Таким образом, установив ротор описанным выше способом и достаточно быстро его раскрутив, можно осуществить поворот системы на плоскости. При этом наличие силы трения является необходимым условием поворота. Стоит отметить, что управление скоростью вращения ротора должно быть согласовано с перемещением продольной массы. Это связано с тем, что асимметрия силы трения относительно продольной оси симметрии ползуна сама по себе не может вызвать его поворота на плоскости. Поворот произойдет только в том случае, если ползун при этом будет поступательно двигаться. Для осуществления поворота на заданный угол нужно синхронизировать движение внутренней массы и работу двигателей, вращающих ротор. Такая механическая система рассмотрена в работе [3].
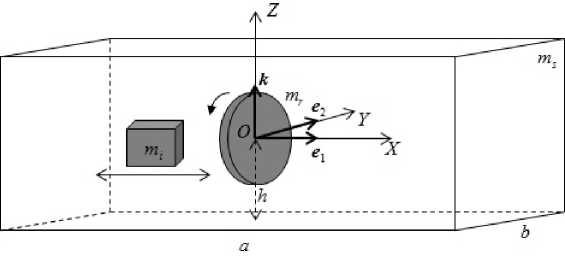
Рис. 1. Ползун, состоящий из корпуса, подвижной внутренней массы горизонтальноориентированного ротора.
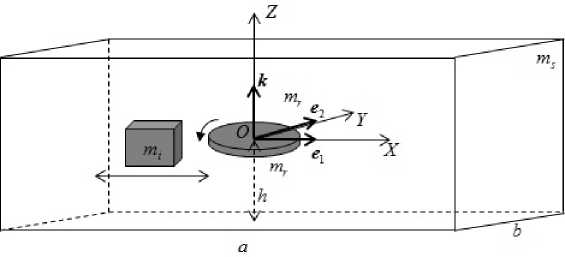
Рис. 2. Ползун, состоящий из корпуса, подвижной внутренней массы и вертикальноориентированного ротора.
Отметим, что в обоих случаях можно заменить ротор быстро раскрученным динамически симметричным телом — гироскопом, ось которого в первом случае должна быть направ- лена вертикально, а во втором — вдоль продольной оси симметрии ползуна. Прикладывая момент, создаваемый двигателями, к гироскопу, можно получить ответную реакцию, соответствующую моментам, в каждом из приведенных выше случаев.
В качестве модели трения между корпусом и плоскостью принимается локальный закон сухого трения Амонтона-Кулона. В связи с зависимостью сил трения от нормальной нагрузки решение исследуемой задачи связано с введением некоторой модели контактных напряжений. Для описания модели сил трения и уравнений движения рассматриваемой механической системы используется подход, предложенный в [6-7].
Целью настоящей работы является сравнение эффективности и выявление особенностей поворота ползуна при помощи ротора, ориентированного двумя выше описанными способами.
2. Постановка задачи
Рассмотрим твердое тело (корпус ползуна) массы m s в форме параллелепипеда, опирающееся на шероховатую горизонтальную плоскость. Корпус обладает полостью, в которой располагается подвижное внутреннее тело массы mi. В полости также находится ротор массы mr и с осевым моментом инерции J T = -mr^2, гДе ^ — радиус ротора. Центр масс ротора совпадает с центром масс корпуса. Введем следующие системы координат: инерциальную неподвижную О’Х'Ү'Z ‘ с началом на плоскости и связанную с телом OXYZ с началом в центре масс корпуса. Ось OZ направим вертикально вверх, ось ОХ — параллельно большему ребру основания, а ось OY так, чтобы система образовывала правую тройку (рис. 1 и 2). В начальный момент времени соответствующие оси систем сонаправлены. Предполагается, что главные оси центрального эллипсоида инерции корпуса совпадают с осями системы OXYZ. а соответствующие моменты пперщш равны А. В и С.
Положение ползуна определяется тремя координатами. Координаты хо, Уо задают точку О в неподвижной системе координат (аппликата этой тонки постоянна и равна ҺҮ Угол у между осями О'Х' и ОХ задает поворот ползуна относительного начального положения. Теоремы о движении центра масс и изменении кинетического момента системы относительно точки О выражаются уравнениями ттс = F + TV + Т, m = ms + mi + mT,
К о = М + Mn + Мт + m^G x уо, где tg = О’С — радиус-вектор, направленный из точки О’ в центр масс G системы, состо ящей из корпуса, внутренней массы и ротора; F, V и Т — главные векторы внешних сил, нормальной реакции и сил трения соответственно; К о — кинетический момент системы от носительно точки О; М, Мn и Мт — главные моменты внешних сил, нормальной реакции и сил трения относительно точки О соответственно; dg Центр масс ползуна можно выразить через векторы и ио ~ скорости точек G и О. то = О'О — центр
масс системы,
состоящей из корпуса и ротора, и Ti — центр масс внутреннего подвижного тела:
msто + m T т о + m i T i m s + m T m i
G m m о m i
Радиус-векторы то, Ti, а также направляющие орты связанной с телом системы координат соответственно равны
|
х о |
X i |
cos y |
— siny |
0 |
|||||
|
т о = |
У о |
, T i = |
У і |
, еі = |
sin y |
, е2 = |
cos y |
, k = |
0 |
|
_ Һ _ |
Һ |
0 |
0 |
1 |
Вектор К о можно разбить на три составляющие: кинетический момент корпуса, кинетический момент ротора и кинетический момент внутренней подвижной массы:
К о = К s + К г + К i ,
N где Кs = Сфк, Кr = Jrшт + J^фк, Кг = фф (тга — tq) х тiamia, J^ — момент инерции а=1
ротора относительно вертикальной оси, проходящей через его центр масс, ш г — угловая скорость вращения ротора вокруг своей оси, N — количество материальных точек внутреннего подвижного тела, тга — радиус-вектор некоторой материальной точки этого тела, N
52 m ^a = m i. Таким образом, кинетический момент системы относительно тонки О равен а=1
N
К О — J r ^ г + (С + J k ) фк+ ^ (т іа т О ) х т ia m ia .
а=1
Реакция опоры, сила трения, а также соответствующие им моменты определяются следующими формулами:
|
TV = к Ң п (А) ds, |
(3) |
|
М N = Ц п (А) т (А) х k ds, |
(4) |
|
Т = Ң t (А) ds, |
(5) |
|
М т = II т (А) х t (А) ds, |
(6) |
|
Ғ = —mg k , |
(7) |
|
М = ( т с — т О ) х Ғ . |
(8) |
Интегрирование везде ведется по области D, состоящей из точек корпуса, соприкасающихся с опорой, п (А) и t (А) — нормальное и касательное напряжения в точке А Е D, т (А) = ОА. Трение локально описывается законом Амонтона-Кулона:
t (А) = —цп ’ s • (А)| где ц — коэффициент трения, у (А) = т (А). Для описания нормального напряжения используется динамически совместная модель [6-7]:
п (А) = Ао + Аіж + А2У.
Условие неразрывности контакта корпуса и плоскости накладывают на кинематические характеристики три независимых ограничения. В связи с этим модель нормальных напряжений (9) должна включать три параметра Ао, Аі, А2, определяемых в каждый момент времени из этих условий. Подставляя закон Амонтона-Кулона и выражение для нормального напряжения в формулы (3)-(8) и далее подставляя все силы и моменты сил в систему из шести уравнений (1)-(2), получим уравнения движения тела в замкнутой форме, причем в каждый момент времени неизвестными являются обобщенные координаты жо, Уо и ф, а также коэффициенты разложения в линейной модели (9).
3. Продольное движение ползуна
Продольное передвижение ползуна достигается за счет перемещения внутренней массы [1]. Так как движение происходит вдоль продольной оси симметрии ползуна, задача является одномерной. Запишем теорему об изменении количества движения для двух систем: системы, состоящей из ползуна и ротора, и системы, состоящей только из внутренней массы:
(ms +mr) t q = Ғ г + R,
(Ю)
(И)
miTi = —mi tq — Ғг, где То — ускорение ползуна, Д — ускорение внутреннего тела, Ft — сила взаимодействия между внутренним телом и ползуном, R — сила сухого трения, действующая между ползуном и плоскоствю:
R = —^N sign то, Т о = 0, |R| 6 nN, Т о = 0, N = mg.
Исключая из уравнений (10) и (11) силу Ft, получим зависимость ускорения корпуса от ускорения внутреннего тела:
R — m t T t
Поступательное движение ползуна вдоль своей продольной оси симметрии достигается за счет периодического движения внутреннего тела, реализуемого при помощи некоторого двигателя. Как уже отмечалось, это движение можно разбить на две фазы. Во время первой фазы внутреннее тело движется с постоянным ускорением T t ^ 0, приводя корпус в движение в противоположную сторону. Во второй фазе внутреннее тело перемещается в свою исходную точку внутри корпуса с постоянным ускорением Tt ~ 0. Благодаря наличию силы трения обратного смещения корпуса не произойдет. Таким образом, будем считать, что поступательное движение ползуна известно.
4. Расчет коэффициентов модели нормального напряжения
Для достижения цели работы учет внутренней массы, движущейся вдоль продольной оси симметрии ползуна, не является необходимым. При этом наличие такого подвижного тела внутри корпуса значительно усложняет систему уравнений (1), (2), что связано со смещением центра масс системы внутри ползуна. Для упрощения уравнений движения положим, что масса m t покоится и будем считать, что ее центр масс совпадает с точкой О, а поступательное движение ползуна задается из начальных условий. Тогда центр масс системы G и начало связанной с корпусом системы координат О (геометрический центр ползуна) совпадают: t q = то- Система уравнений (1), (2) упрощается:
т т о = F + N + Т , К о = M N + М т , К о = J r Ш + (С + J k ) ф k , М = 0.
В качестве уравнений движения системы далее принимаем уравнения (12), (13).
Вычислим интеграл в формуле (3), учитывая симметрию области контакта ползуна
и плоскости, состоящей из точек (ж, у): ж €
г a ап
I. - 2’2?
У €
продольного и поперечного ребер корпуса:
Г — Ь ; Ь 2’ 2
где а и Ь — длины
N = AoS (D) к = АоаЬ к ,
S(D') — площадь контакта. Учтем условия неразрывности контакта, то есть отсутствие вертикальной проекции скоростей и ускорений всех точек корпуса. Эти условия можно выразить в трех независимых уравнениях. Первое уравнение находится из условия равенства нулю суммы проекций внешних сил, сил реакции опоры и сил трения на вертикальную ось (проекция уравнения (12) на ось к):
( F + N , к ) = 0.
Используя уравнения (14), (15) и (7), найдем коэффициент Ао:
— ( F , k ) _ mg аЬ аЬ .
Для получения двух оставшихся условий умножим скалярно уравнение (13) на орты е х и е2. Проекции моментов М n и М т соответственно равны:
( М n , е п ) = Ц п (И) ( г (И) х к , е п ) ds = Л п (И) ( к , е п х г (И)) ds, п = 1, 2,
( М т , е п ) = - [[ рп (И) Г г (И) х - (И) , е п^ ds = | -(И)| /
- [[ Рп (И) ( - (И) , еп х г (И)") ds. JJ v | -(И)| /
Тогда, используя разложение (9), получим два скалярных уравнения:
( к о , е п) = Цф п (И) (Д о + А х ® + А 2 у) ds, Фп (И) = (к - р |^(И)| , е п х г (И)) .
Используя формулу Эйлера, запишем скорость произвольной точки И основания корпуса:
- (И) = -ио + фк х г (И) = -о + ф (хе2 - уех), где -о = го = [хо Уо 0]7 скороеть точки О, фк — угловая скорость корпуса ползуна, г (И) = хех + уе2 — һк. Для определения Фп выполним ряд вспомогательных вычислений:
ех х г (И) = ук + һе2, е2 х г (И) = —хк — һех, к - pq- (И) = -ро—о - РОф (хе2 - уех) + к, q = I- (И)|-х
[(хо + ф ( - Х sin ф - у cosф))2 + (уо + ф (х cosф - у sin ф))2] 2
Тогда получим следующие выражения функций Фп:
Ф х = у - pqh (( - о , е 2 ) + фЬх) , Ф 2 = - х + р^һ (( - о, е х ) - фу).
Перепишем уравнения (16) в виде системы двух линейных уравнений относительно переменных А х іі А 2:
О хх А х + О х2 Д 2 = П хо д о + J r ( d j Г , ех) ,
О2хДх + «22Д2 = «20Д0 + Jr (d^ г , е2) , где коэффициенты уравнений имеют вид ахх = jj Фххds, ах2 = Л ФXуds, О2х = Л Ф2хds, 022 = Л Ф2Уds,
О хо = -
0 20 = -
// Ф1ds'
# Ф2ds.
Используя метод Крамера, найдем переменные Ах, А2:
А х (о хо д о + J r (d) Г , е х )) О 22 - О х2 (о 20 Д 0 + J r ( d ) г , е 2 ))
Дх = ТУ =--------------------------------------
А ОцО22 - Ох2О2х
А 2 О хх (о 20 Д 0 + J r ( d ) г , е 2 )) - (о х0 А 0 + J r ( ^ г , е х )) О 2х
Д 2 = = -----------------------------------------
А ОцО22 - Ох2О2х
5. Определение уравнений движения системы
Спроектируем уравнение (13) на ось аппликат:
(Ко, к) — (Мт, к), где
М Т — — Ң (ж е 1 + у е 2 — Һ к ) х дп (И) у ( - о + жф) е 2 — уф? е 1) ds —
— Л дп (И) у [ж ( е і х - о ) + ж2ф к + у ( е 2 х - о ) + у2^? к — Һ ( к х ( - о + жф? е 2 — уф? е і))] ds —
— Л дп (И) у [ж (cos фуо
—
— sin фж о ) к + ж2ф к + у (— sin фуо — cos фж о ) к + у2ф к —
Һ ( к х ( - о + жф е 2 — уф в і))] ds.
Получаем уравнение
J - ( ш - , к ) + (С + J k ) ф —
-
— —д Л п (И) у (ж (cos фуо — sin фж о + жф) + у (— sin фу о — cos фж о + фу)) ds.
Умножим скалярно уравнение (12) на орты еі и 62:
т (жо cos ф + уо sin ф) — —д Л п (И) у ( - (И), е 1) ds —
— —д Л п (И) у ( -о + ф (ж е 2 — у е і), e i) ds —
— —д Л п (И) у (ж о cos ф + уо sin ф — уф?) ds, т (—Жо sin ф + уо cos ф) — —д Л п (И) у ( - (И) , е 2) ds —
— —д Л п (И) у (- о + ф (ж е 2 — у е і), 6 2) ds —
— —д Л п (И) У(—Ж о sinф + уо cosф + ф ж) ds.
Обозначим интегралы в правых частях последних трех уравнений следующим образом:
-
І1 — Л п (И) у (ж (cos фуо — sin фж о + жф?) + у (— sin фу о — cos фж о + фу)) ds,
І2 — Л п (И) у (ж о cos ф + у о sin ф — уф?) ds,
І3 — Л п (И) у (—ж о sinф + уо cosф + фж) ds.
Тогда система дифференциальных уравнений относительно обобщенных координат жо, уо, ф примет следующий вид:
J r ( ш-г , к) + (С + J k ) ф — —дІі, т (d o cos ф + уо sin ф) — —дІ2, m (— d o sin ф + уо cos ф) — —дІз.
Для того чтобы разрешить эти уравнения относительно обобщенных ускорений, умножим второе уравнение на cosф, а третье на sinф, после чего вычтем полученные выражения. Затем умножим второе уравнение на sinф, а третье на cosф, после чего сложим
|
уравнения: |
.. — (ЦI 1 + Jг (ш г , к)) ф = С + J k ’ .. —ц (І 2 cos ф — I 3 sin ф) х Ж о = , т —ц (I 2 sin ф + I 3 cos ф) У о = . т |
Приведенные выше выражения образуют замкнутую систему уравнений движения ползуна при условии, что коэффициенты разложения нормального напряжения Ао, Ац А2 известны. Для упрощения и анализа системы (18) рассмотрим описанные выше варианты ориентации ротора внутри ползуна.
5.1. Ротор с горизонтальной осью вращения
Рассмотрим первый вариант расположения ротора внутри полости: горизонтальноориентированный (рис. 1). Момент инерции J k при данной ориентации будет равен
J r _ т т г2
к = 2 = 4 .
Вектор угловой скорости в неподвижной системе координат выражается через орт ер.
ш г = ш г е 1.
От времени зависит как модуль угловой скорости, так и её направляющий орт. Поэтому ш г = шг е1 + шт. е 1 = шг е1 + шг ф е2.
С учетом последнего равенства системы уравнений (17) и (18) примут следующий вид:
(О 10 А 0 + J г ш г ) 0 22 — 0 12 (0 20 Л 0 + J г ш г ф
А 1 = ------------------------------------ 0- 11 0- 22 — 0 12 0 21
0 11 (0 20 А 0 + J г ш г ф) — (0 10 А 0 + J г шг) 0 21 а2 = ------------------------------------ 0 11 0 22 — 0 12 0 21
„ _ —2ЦI1
ф = 2С + J г ’
—ц (I 2 cos ф — I3 sin ф)
т
—ц (I2 sin ф + I 3 cos ф)
Можно сделать вывод, что угловое ускорение ротора шг явным образом входит в выражения для коэффициентов модели нормальной нагрузки (9). Это является подтверждением тезиса, что при горизонтально-осевой ориентации ротора внутри ползуна поворот системы на плоскости происходит за счет искусственного создания асимметрии в распределении нормального давления в области контакта между плоскостью и корпусом ползуна.
5.2. Ротор с вертикальной осью вращения
Рассмотрим теперь вертикально-ориентированный ротор. При таком расположении ось вращения ротора коллинеарна орту к (рис. 2):
ш г = ш г к .
В этом случае от времени зависит только модуль угловой скорости шг;
ш г = ш г к, а моменты инерции JT и J^ будут совпадать: J^ = JT. Уравнения (17) и (18) примут следующий вид:
0 10 0 22 - 0 12 0 20 Л 1 = ---------------А д ,
0 11 0 22 — 0 12 0 21
0 11 0 20 — 0 10 0 21
Л 2 = ----------------Л 0 ,
0 11 0 22 — 0 12 0 21
— (цІ1 + Jr Со т)
У = С + JT ,
— ц (І2 cos у — І3 sin у) > =------------------------ m
_ —ц (І2 sin у + І3 cos у)
6. Численное моделирование
Из полученной системы уравнений видно, что момент силы, прикладываемый к ползуну со стороны ротора, не влияет на распределение контактного напряжения между корпусом и опорной плоскостью. Поворот ползуна достигается непосредственно за счет создания момента силы J r С т вдоль вертикальной оси.
Для оценки эффективности поворота ползуна на плоскости при различных расположениях ротора было проведено моделирование в среде MATLAB. В процессе моделирования численно интегрировались системы уравнений (19) и (20). Для этого в каждый момент времени вычислялись коэффициенты модели нормального напряжения Ло, Л1, Л2.
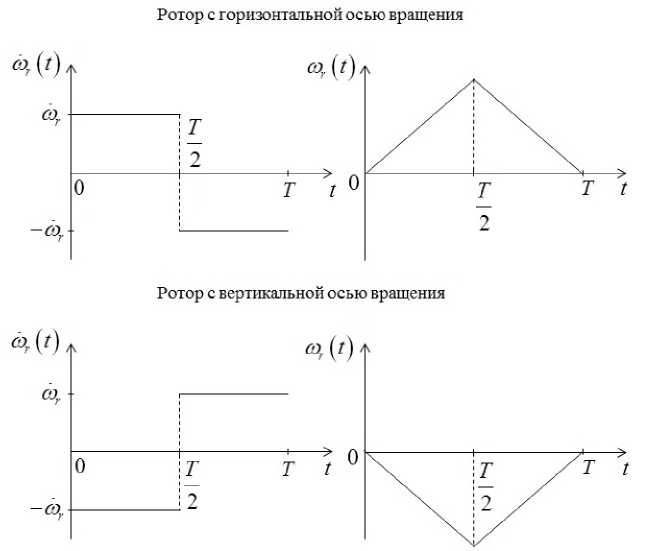
Рис. 3. Зависимость углового ускорения и угловой скорости ротора, от времени за. период движения
Начальные условия задавались следующим образом: хо = 0, уо = 0, у = 0, Хо = 1-, с уо = 0, у = 0, г де 0 — длина продольного ребра ползуна. Указанные условия соответствуют случаю, когда в начальный момент времени ползуну сообщается импульс вдоль продольной оси симметрии. Кроме того, в начальный момент времени принимались следующие значения угловой скорости и углового ускорения ротора: шт = 0, Сг = 3с-2 — для горизонтально-ориентированного расположения ротора, шт = 0, шт = -3с-2 — для вертикально-ориентированного расположения ротора. В качестве зависимости величины углового ускорения ротора от времени шт (t) использовалась кусочно-постоянная функция (рис. 3). Величины углового ускорения для случая горизонтально- и вертикальноориентированного ротора брались с противоположным знаком. Такой выбор сделан из соображений наглядности и обусловлен тем, что при равенстве по знаку Шт ползун будет поворачиваться в разные стороны при смене расположения ротора.
Рассмотрим случай горизонтально-ориентированного ротора. С момента начала дви-Т жения ползуна и до момента —, соответствующего остановке ползуна, ротор вращается с
Т угловым ускорением шг. Затем на интервале времени — 6 t 6 Т ротор вращается с угловым ускорением —шт. Такая зависимость углового ускорения от времени обеспечивает равенство нулю угловой скорости ротора к моменту окончания периода движения. Таким образом, к концу периода движения подвижные массы внутри полости возвращаются в исходное состояние. На рис. 4 приведены траектории ползуна за время, равное 5 периодам движения на фазовой плоскости (у, у), коэффициент трения ц = 0.3.
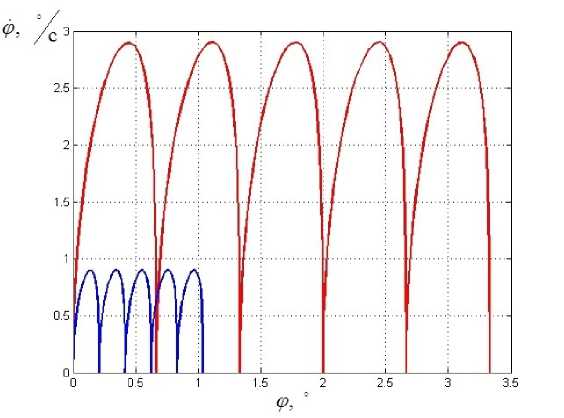
Рис. 4. Траектория ползуна за 5 периодов движения на фазовой плоскости (у, у). Синий график — горизоитальио-осевое расположение ротора, красный — вертикально-осевое расположение ротора.
На рис. 5 приведены результаты численного моделирования, показывающие величину угла, поворота, ползуна, за. один период движения для различных значений коэффициента. трения. Можно сделать вывод, что величина, коэффициента, трения играет существенную роль с точки зрения выбора, расположения ротора, внутри полости и соответственно максимизации угла поворота. При значениях коэффициента трения 0 < ц < 1 больший угол поворота, достигается при вертикально-ориентированном расположении ротора. При значениях коэффициента трения ц > 1 больший угол достигается при горизонтальноориентированном расположении ротора. Учитывая, что коэффициент трения скольжения между различными фрикционными парами обычно лежит в пределах 0.2 < ц < 0.6, вертикально-осевое расположение ротора, представляется более эффективным с точки зрения максимизации угла, поворота. Однако необходимо учитывать, что при таком расположении ротора, возможен обратный поворот ползуна, вследствие торможения ротора. Этот нежелательный эффект полностью отсутствует при горизонтально-осевом расположении из-за. особенности эффекта, в результате которого происходит поворот системы. При этом энергетические затраты, уходящие на раскрутку и торможение ротора, в обоих случаях одинаковы.
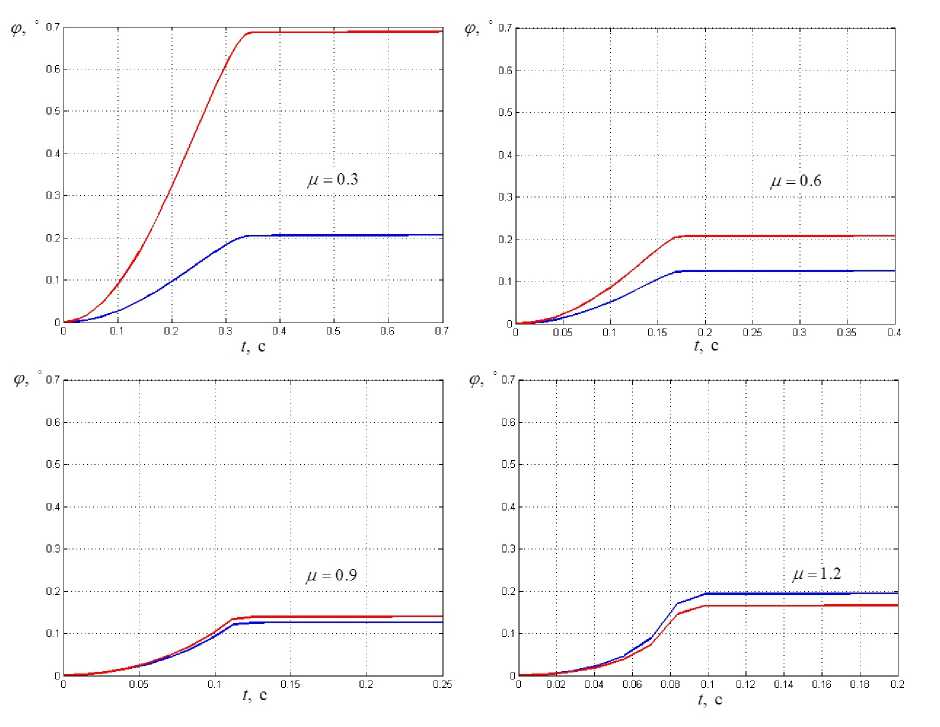
Рис. 5. Угол поворота, ползуна, за. один период движения при различных значениях коэффициента, трения. Синий график - горизоитальио-осевое расположение ротора, красный - вертикально-осевое расположение ротора.
7. Заключение
В статье была, рассмотрена, возможность поворота, твердого тела, без внешних движителей на. шероховатой плоскости. Для осуществления маневрирования тела, предлагалось разместить во внутренней полости ротор. Ориентация ротора, выбиралась двумя способами: горизонтально- и вертикально-ориентированное расположение. В случае горизонтально-ориентированного расположения ротора, поворот ползуна, достигается за. счет использования силы трения, а в случае вертикально-ориентированного расположения — вопреки силе трения. Установлено, что для большинства, фрикционных поверхностей вертикально-ориентированное расположение ротора, дает больший угол поворота, по сравнению с горизонтально-осевым расположением при условии одинаковых энергетических затрат. Однако существенным преимуществом использования горизонтально-осевого расположения является отсутствие нежелательного обратного поворота, ползуна. Это достигается благодаря синхронизации поступательного движения ползуна, и вращения ротора. Горизонтально-ориентированное расположение ротора, также является более интересным с точки зрения описания эффекта, в результате которого происходит вращение системы. Вполне возможно, что такое расположение ротора, может быть целесообразно при определенных обстоятельствах и конфигурациях подвижной системы.
Дальнейшим продолжением работы может являться составление и решение уравнений движения с учетом смещения центра, масс внутри ползуна, исследование зависимостей угла, поворота, от геометрических размеров корпуса, постановка, задачи с другой конфигурацией подвижных внутренних масс (эксцентрики, подвижные точечные массы и т.д.), с целью достижения большей маневренности подвижного объекта. Возможна постановка задачи управления движением ползуна.
Исследование выполнено при поддержке РФФИ, проекты 11-01-00354, 14-01-00432; Министерства образования и науки Российской Федерации, соглашение 14.А18.21.0374; базовой части Государственного задания в сфере научной деятельности за № 2014/120 «Исследование закономерностей динамики систем с трением и разработка мобильных роботов без внешних движетелей» (НИР № 2583).
Список литературы Поворот тела без внешних движителей при помощи ротора
- Черноусько Ф.Л. Анализ и оптимизация движения тела управляемого посредством подвижной внутренней массы//ПММ. -2006. -Т. 70, вып. 6. -C. 915-941
- Черноусько Ф.Л. Оптимальные периодические движения двухмассовой системы в сопротивляющейся среде//ПММ. -2008. -Т. 72, вып. 2. -C. 202-215
- Иванов А.П., Сахаров А.В. Динамика твердого тела с подвижными внутренними массами и ротором на шероховатой плоскости//Нелинейная динамика. -2012. -Т. 8, № 4. -С. 763-772
- Francois Michaud, Jean de Lafontaine, Serge Caron A Spherical Robot for Planetary Surface Exploration//Proceeding of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-SAIRAS 2001. -2001
- Shourov Bhattacharya, Sunil K. Agrawal. Design, Experiments and Motion Planning of a Spherical Rolling Robot//Proceedings of the 2000 IEEE International Conference on Robotics & Automation. -2000
- Иванов А.П. Основы теории систем с трением. -М.-Ижевск: НИЦ «Регулярная и хаотическая динамика», 2011
- Иванов А.П. Динамически совместная модель контактных напряжений при плоском движении твердого тела//ПММ. -2009. -Т. 73, вып. 2. -С. 189-203
