Повышение достоверности выводов эксперта при расследовании ДТП

Автор: Мережко М.Ю.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 5 (71), 2021 года.
Бесплатный доступ
В статье рассмотрены основные методики расчета скоростей при столкновении автомобилей при производстве экспертизы ДТП. Поскольку данные методики не учитывают ряд факторов, влияющих на скорость автомобиля, предложен способ повышения достоверности выводов эксперта.
Дорожно-транспортное происшествие, экспертиза дтп, автомобиль, скорость, столкновение
Короткий адрес: https://sciup.org/140276093
IDR: 140276093 | УДК: 656-084
Increasing the reliability of expert's conclusions when investigating accidents
The article discusses the main methods for calculating the speed in a collision of cars in the production of road accident expertise. These methods do not take into account the factors affecting the speed of the car, therefore, a method is proposed to increase the reliability of the expert's conclusions.
Текст научной статьи Повышение достоверности выводов эксперта при расследовании ДТП
Экспертизой дорожно-транспортных происшествий (ДТП) называется комплексное научно-техническое рассмотрение всех аспектов любого дорожнотранспортного происшествия в отдельности, осуществляемое лицами, обладающими специальными знаниями в данном виде деятельности. Экспертиза сочетает в себе изучение данных из разных областей: юриспруденции; криминалистики; медицины; психофизиологии; конструкции, теории транспортных средств, технологии их изготовления, обслуживания и ремонта; проектирования, строительства и эксплуатации дорог, организации и безопасности дорожного движения и др.
Самой главной задачей при производстве экспертизы ДТП считается определение скоростей автомобилей непосредственно перед столкновением. Это обусловлено тем, что превышение скорости является наиболее распространенным нарушением ПДД, а также скорость движения оказывает влияние на способность водителя своевременно остановить свой автомобиль в случае обнаружения опасности и на угол обзорности.
Теоретически можно выделить три основных способа, по которым рассчитываются скорости (рисунок 1):
-
- Определение скорости из закона сохранения количества движения;
-
- Определение скорости по длине следов торможения;
-
- Определение скорости исходя из полученных деформаций.
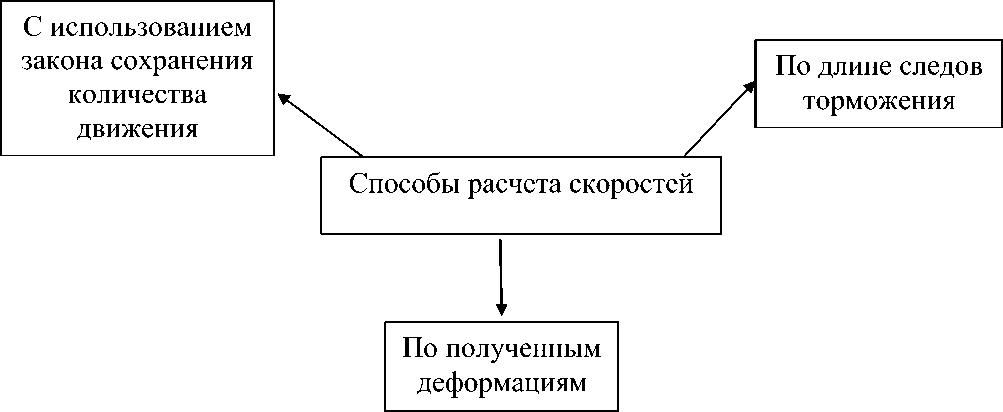
Рисунок 1 - Способы расчета скорости [3]
Установление скоростей по закону сохранения количества движения используют при столкновении с неподвижным препятствием или транспортным средством (ТС), а также при перекрестных столкновениях под углом, близким к 90 градусам. В этом способе скорость транспортного средства вычисляют по виду его движения после удара, а также, при столкновении с другим автомобилем, по перемещению второго ТС вследствие перехода кинетической энергии от первого.
Недостатками вычисления скоростей с учетом сохранения количества движения являются:
-
- неточный результат из-за недостаточного количества информации о режиме движения автомобиля;
-
- более сложные и немалые расчеты по сравнению с методом определения скорости по длине следов торможения;
-
- не рассматривается энергия, затраченная на разрушение ТС и препятствий.
При этом метод с использованием закона сохранения количества движения обладает рядом достоинств:
-
- он дает возможность определить скорость ТС при отсутствии следов торможения;
-
- при тщательном учёте всех факторов результаты имеют достаточно высокую достоверность;
-
- удобство использования метода при перекрёстных столкновениях и столкновениях с неподвижными препятствиями.
Расчет скорости автомобиля по следу торможения имеет ряд существенных недостатков, таких как:
-
- следы юза часто незаметны на влажных, обледенелых, заснеженных покрытиях. Кроме того, с течением времени резина протектора изнашивается, вследствие чего длина тормозного следа уменьшается;
-
- не учитывается расход энергии на деформацию другого ТС при столкновении;
-
- если автомобиль оборудован антиблокировочной системой, то шины практически не оставляют следов при экстренном торможении.
Достоинствами данного способа являются:
-
- относительная простота расчетов;
-
- большое количество составленных методических рекомендаций и научных работ;
-
- быстрота получения результатов.
При производстве экспертизы чаще всего определяют скорость с использованием закона сохранения количества движения в совокупности с учетом следов торможения. Данные методики являются взаимодополняющими, за счет чего достигается максимальная точность результатов. Остальные способы определения скорости транспортного средства не получили широкого применения по причине недостоверности получаемых результатов и необходимости сложных и трудоемких вычислений, а также из-за необходимости учета показаний свидетелей аварии, в таком случае полученная информация будет субъективной.
На основе рассмотренных законов В. А. Иларионовым была предложена методика для расчета скоростей при перекрестном столкновении [1, с. 193].
При перекрестном столкновении автомобили совершают сложное движение, так как каждый из автомобилей начинает вращаться вокруг своего центра тяжести. Центр тяжести в свою очередь перемещается под некоторым углом к первоначальному направлению движения (5 1 ,5 2 ).
Все количество движения системы можно разложить на две составляющие в соответствии с первоначальным направлением движения автомобилей 1 и 2. Поскольку количество движения в каждом направлении из указанных не изменяется, то имеют место следующие зависимости:
m1v1 = m1v‘cos51 + m2v‘cos52, m2v2 = m1v‘sin51 + m2v2sin52,
где v 1 , v 2 - скорости автомобилей 1 и 2 после столкновения, м/с;
v1, v2 - скорости автомобилей непосредственно перед столкновением, м/с;
5 1 ,5 2 - угол между первоначальным направлением движения
-
автомобиля и перемещением его центра масс после столкновения, град.;
m 1 , m2 - массы автомобилей, кг.
Скорость 1 автомобиля непосредственно перед столкновением рассчитывается по формуле:
/sin(y-5i) ‘m2 sin 52
V1 V1 sin у V2m1 sin у ,
где v 1 , v 2 - скорости автомобилей 1 и 2 после столкновения, м/с;
-
у - угол между векторами скоростей автомобилей в момент удара, град.;
51,52 - угол между первоначальным направлением движения автомобиля и перемещением его центра масс, град.;
-
m 1 , m2 - массы автомобилей, кг.
Скорость автомобиля 2 непосредственно перед столкновением рассчитывается по формуле:
, m 1 sin 5 1 , sin(у + 5 2 )
‘ mi sin i r' sm(' + V2 V1m2 sin у V2 sin у
где v 1 , v 2 - скорости автомобилей 1 и 2 после столкновения, м/с;
-
у - угол между векторами скоростей автомобилей в момент удара, град.;
51,52 - угол между первоначальным направлением движения автомобиля и перемещением его центра масс, град.;
m 1 , m 2 - массы автомобилей, кг.
Скорости после столкновения можно найти, предположив, что кинетическая энергия каждого автомобиля после удара перешла в работу трения шин по дороге во время поступательного перемещения на расстояние S 1 (S2) и поворота вокруг центра тяжести на угол 51 (52).Если после столкновения автомобиль развернулся на некоторый угол относительно первоначального направления движения, то в расчетах следует использовать коэффициент сцепления с дорогой в поперечной плоскости, который равен Ру = 0,8рх, где рх - коэффициент сцепления с дорогой в продольном направлении.
Скорость автомобиля 1 после столкновения:
^ 1
^26gpy(Si + Li
7Г^1
180) ’
где ( 1 - угол поворота автомобиля 1;
L 1 - база автомобиля 1, м;
д - ускорение свободного падения;
ру = 0,8рх - коэффициент сцепления с дорогой в поперечной плоскости;
S 1 - расстояние, на которое переместился центр масс автомобиля 1
после удара, м.
Точно так же находим скорость автомобиля 2 после столкновения:
^ 2
|26gpy(S2 + L2 Y^^), 180
где (2 - угол поворота автомобиля 2;
L 2 - база автомобиля 2, м;
д - ускорение свободного падения;
ф у = 0,8фх - коэффициент сцепления с дорогой в поперечной плоскости;
S 2 - расстояние, на которое переместился центр масс автомобиля 2 после удара, м.
Если перед столкновением водитель автомобиля 1 осуществлял торможение (имеется след юза на дороге), то скорость до начала торможения составляла:
ца1 = 1,8 *tH*j + ^2* ST1*j + v12 , (7)
где ST1 - длина тормозного следа автомобиля 1 , м;
tH - время нарастания замедления, с;
-
j = д * фх — замедление автомобиля, м/с2;
-
ф х - коэффициент сцепления в продольной плоскости;
-
ц 1 - скорость автомобиля 1 после столкновения , м/с .
Данная методика учитывает:
-
- закон сохранения количества движения;
-
- углы, на которые развернулись транспортные средства после столкновения;
-
- углы, под которыми переместились центры масс относительно первоначального направления движения;
-
- расстояния, на которые переместились центры масс автомобилей после удара;
-
- длины тормозных следов.
Подобная методика определения скоростей ТС была предложена в патенте RU 2196697 авторами Л. А. Черепановым и Ю. А. Некрасовым. Ими представлен способ определения факторов дорожно-транспортных происшествий, который заключается в составлении схемы ДТП в масштабе с изображением моделей транспортных средств на основе предварительного изучения дорожной обстановки на момент ДТП. Модели транспортных средств устанавливают в условную точку столкновения, полученную из исходных данных, определяют по характеру повреждений угол столкновения между векторами скоростей 71, 72 моделей транспортных средств, определяют углы, под которыми переместились центры масс транспортных средств после удара относительно векторов их скоростей в момент столкновения, определяют скорости 71, 72 транспортных средств до столкновения, на основе уравнений количества движения системы [8]:
т- 1 7 1 + m 2 v2 cosy = m17 ‘ cosФ1 + m27 2 cosФ2, (8)
т171 cosy + т272 = m17‘cosФ3 + m27‘cosФ4, (9)
где у - угол между векторами 7 1 , 7 2 в момент удара;
т 1 = т0 + птл, где т0 - снаряженная масса автомобиля 1, тл = 75 кг – масса человека, n – количество человек в автомобиле;
т2 = т0 + птп, где т0 - снаряженная масса автомобиля 2;
-
7 1 , 7 2 - скорости автомобилей 1 и 2 перед столкновением
соответственно;
-
7 1 , 7 2 - скорости автомобилей 1 и 2 после столкновением
соответственно;
Ф 1 , Ф 2 , Ф 3 , Ф 4 – углы для данной точки столкновения, под которыми переместились центры масс автомобилей после удара относительно векторов их скоростей в момент столкновения, град.
Скорости 7 1 , 7 2 можно рассчитать, предположив, что кинетическая энергия каждого автомобиля перешла в работу трения шин по дороге во время поступательного перемещения на расстояние S после столкновения.
Работа трения шин на дороге при поступательном движении автомобиля:
ЛТ р = тдЪф у , (10)
где т - масса автомобиля;
-
д - ускорение свободного падения;
-
ф у = 0,8фх - коэффициент сцепления с дорогой в поперечной плоскости;
S - расстояние, на которое переместился центр масс автомобиля после столкновения, м.
То же при повороте его относительно центра тяжести:
|
^ вр = (R zl d + R zZ^ P y * е, (11) |
-
где a и b - расстояния от переднего и заднего мостов автомобиля до его центра тяжести;
R z 1 и R z2 - действующие на передний и задний мост автомобиля нормальные реакции дороги;
-
е - угол поворота автомобиля, рад;
P y = 0,8px
– коэффициент сцепления с дорогой в поперечной
плоскости.
-
L – база автомобиля;
-
a и b - расстояния от центра тяжести до переднего и заднего мостов автомобиля соответственно;
-
д - ускорение свободного падения.
Таким образом, скорость автомобиля перед столкновением определяется
Атр - работа трения шин на дороге, Дж;
Авр — работа при повороте автомобиля вокруг центра тяжести, Дж.
Исходя из формул (8) и (9) можно определить скорости автомобилей перед столкновением:
m^v! С05Ф1 + m2v‘соsФ2 vi =--------------------------, т1
где v ! , v 2 - скорости автомобилей 1 и 2 после столкновения, м/с;
m 1 – масса автомобиля 1, кг;
Ф1 – угол, между первоначальным направлением автомобиля 1и перемещением его центра масс после удара, град.;
Ф2 - угол, между первоначальным направлением автомобиля 1и перемещением центра масс автомобиля 2 после удара, град.
Аналогично для автомобиля 2:
т^ ’ созФ з + m2v ‘ соsФ4
V2 = -----------~------------, m2
где v ! , v 2 - скорости автомобилей 1 и 2 после столкновения, м/с;
m 2 – масса автомобиля 2;
Ф3 – угол, между первоначальным направлением автомобиля 2 и перемещением его центра масс после удара, град.;
Ф4 - угол, между первоначальным направлением автомобиля 2 и перемещением центра масс автомобиля 2 после удара, град.
Зная скорости v1и v2 автомобилей непосредственно перед столкновением, можно найти скорости в начале тормозного пути и перед торможением по длине следов торможения.
Скорость автомобиля в начале тормозного пути:
va
= 0Яж
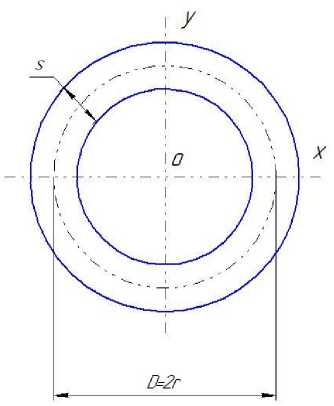
+ ^2g x(ST - L) + (v)2 , (17) где Sт - длина следа юза автомобиля 1 перед ударом, м; tH - время нарастания замедлениям; L – база автомобиля, м; р х - коэффициент сцепления в продольной плоскости; < - ускорение свободного падения; v - скорость автомобиля непосредственно перед ударом. Данная методика учитывает: - работу трения шин на дороге; - работу при повороте автомобиля относительно центра тяжести; - углы, между первоначальными направлениями движения автомобилей и перемещениями их центров масс; - расстояния, на которые переместились центры масс автомобилей после удара; - длины тормозных следов. Однако обе методики не учитывают затраты энергии на преодоление автомобилями препятствий и затраты энергии на разрушение дорожных ограждений. Для повышения достоверности выводов эксперта при расчете скоростей рекомендуется включать в формулу кинетической энергии работу на преодоление транспортным средством высоту дорожного бордюра и расход энергии на деформацию опор дорожных знаков, дорожных ограждений.. Работа, затраченная на преодоление препятствия (например, дорожного бордюра высотой Дй), определяется по формуле: А^ = тдДй, (18) где т - масса автомобиля, кг; Дй - высота бордюра, м. Работу, затраченную на деформацию опоры дорожного знака, можно рассчитать следующим способом. Работа внешних сил при деформации стержней рассчитывается по формуле [19]: А д F * I "1~, где Ад - работа внешних сил, затраченная на деформацию опоры дорожного знака, Дж; F - сила, приложенная к знаку, Н; I - отклонение опоры дорожного знака при деформации, м (рисунок 2). Чтобы рассчитать силу, которую необходимо приложить для деформации опоры дорожного знака необходимо знать максимальный изгибающий момент Мmax и место приложения силы h (рисунок 2) „ ^тах F=— ■ Максимальный изгибающий момент можно вычислить по следующей формуле [6]: ^тах = ^max^f (21) где отах - напряжения в стержне; W – момент сопротивления сечения. Момент сопротивления сечения рассчитывается согласно следующей формуле [7]: W = лг25, где г - радиус сечения, м; s - толщина стенки, м (рисунок 3). / Г--1 Рисунок 2 – Деформация опоры дорожного знака [5] Следовательно, формула для определения затрат энергии на разрушение дорожных ограждений примет вид: алт25* I ■ Ад =---77--- д 2h Таким образом, с учетом затрат энергии на преодоление автомобилями препятствий и затраты энергии на разрушение дорожных ограждений, формула (13) примет следующий вид: m(i/)2 -^- = Ек = АТр + АВр + А^ + Ад. Рисунок 4 – Сечение опоры дорожного знака [5] Подставив в данную формулу выражения для нахождения работы трения шин на дороге, работы при повороте автомобиля относительно центра тяжести, получим величину кинетической энергии автомобилей с учетом затрат энергии на преодоление автомобилями препятствий и разрушение дорожных ограждений получим: Таким образом, благодаря учету энергии на преодоление препятствий и на деформацию дорожных ограждений можно получить более точные значения скоростей автомобилей перед возникновением опасной ситуации, и, следовательно, повысить достоверность выводов эксперта.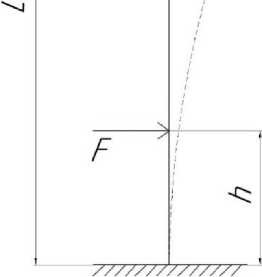
Список литературы Повышение достоверности выводов эксперта при расследовании ДТП
- Иларионов, В. А. Задачи и примеры по экспертизе ДТП. Учебное пособие / В. А. Иларионов. - Москва: МАДИ, 1990г. - 68 с.
- Иларионов, В. А. Экспертиза дорожно-транспортных происшествий: учебник для вузов / В. А. Иларионов. - Москва: Транспорт, 1989. - 225 с.
- Коссович, А. А. Вопросы назначения и производства автотехнической экспертизы / А. А. Коссович. - Москва: Следователь, 2007. - 315 с.
- Комаров, Ю. Я. Экспертиза дорожно-транспортных происшествий в примерах и задачах комаров / Ю. Я. Комаров [и др.]; под ред. Ю. Я. Комарова, Н. К. Клепика. - Москва: Горячая линия - Телеком, 2012. - 290 с.
- Работа внешних сил и потенциальная энергия деформации при изгибе стержней и стержневых систем [Электронный ресурс] / Студенческие реферативные статьи и материалы. - Режим доступа: https://studref.com/363820/stroitelstvo/opredelenie_peremescheniy_pomoschyu_metoda_mora#791
- Таблица. Осевые моменты инерции, моменты сопротивления и радиусы инерции плоских фигур [Электронный ресурс] / Технические таблицы - Режим доступа: https://tehtab.ru/Guide/guidematherials/materialsresistant/momentsofinertion
- Таблица предела прочности сталей [Электронный ресурс] / Центр проектирования. - Режим доступа: https://www.center-pss.ru/st/st165.htm
- Способ определения факторов дорожно-транспортных происшествий: пат. 2196697 Российская Федерация: МПК B 62 F 41/00 / Л. А. Черепанов, Ю. А. Некрасов; заявители и патентообладатели В. А. Романеев, Л. А. Черепанов. - № 2001101709/28; заявл.22.01.01; опубл.20.01.03, Бюл. № 2
