Повышение эффективности асинхронных электроприводов с прямым управлением моментом

Автор: Васильев Богдан Юрьевич, Козярук Анатолий Евтихиевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Дана структура асинхронного электропривода с алгоритмом прямого управления моментом. Изложены особенности классической системы прямого управления. Показано, что в ней из-за невозможности плавного перемещения выходного вектора потокосцепления наблюдаются повышенные искажения кривых тока и напряжения, а это снижает уровень электромагнитной совместимости электроприводов. Описан алгоритм пространственно-векторной (ПВ-) модуляции, приведены математические соотношения, сопутствующие отдельным этапам преобразования переменных в системе управления, изображены временные диаграммы работы автономного инвертора. Выполнено математическое моделирование электропривода с асинхронным двигателем 75 кВт и прямым управлением моментом. Приведены графики линейного напряжения и выходного тока автономного инвертора, а также их спектральные составы для двух схем: с автоматической коммутацией и ПВ-модуляцией. Показано, что в случае с ПВ-модуляцией снижаются пульсации электромагнитного момента, а благодаря однополярности импульсов на полупериоде основной гармоники линейного напряжения существенно снижаются коэффициенты нелинейных искажений тока и напряжения на выходе автономного инвертора.
Автоматизированный электропривод, асинхронный двигатель, автономный инвертор, алгоритм управления, прямое управление моментом, пространственно-векторная модуляция
Короткий адрес: https://sciup.org/147158244
IDR: 147158244 | УДК: 621.316.728
Increase of efficiency induction motor with direct torque control
The structure of the electric drive with direct control algorithm is given. Features of the classical direct torque control algorithm are presented. It is shown that due to its inability to change smoothly the output flux vector the increased distortion of current and voltage curves are observed and it reduces the level of drives electromagnetic compatibility. The algorithm of space vector (SV-) modulation is described. The mathematical relationships that accompany the separate steps in the transformation of variables in control system are shown. The authors provide timing diagrams of the autonomous inverter. The mathematical modeling of the electric drive with the 75 kW induction motor and direct torque control was done. The graphs of the line voltage and output current of the autonomous inverter are given, as well as their spectral composition for two schemes: with automatic switching and SV-modulation. It is shown that in the case of SV-modulation the electromagnetic torque ripples are decreased, and thanks to the unipolar pulses per half cycle of the fundamental harmonic of line voltage the nonlinear distortion factor of current and voltage at the output of the autonomous inverter are significantly reduced.
Текст научной статьи Повышение эффективности асинхронных электроприводов с прямым управлением моментом
Введение. Использование в автоматизированных электроприводах (АЭП) современных силовых полупроводниковых приборов и специализированных микропроцессорных средств управления, в частности, цифровых сигнальных процессоров (Digital Signal Processor – DSP), позволяет реализовать самые сложные алгоритмы управления электротехнических комплексов и обеспечить оптимальные режимы их работы [1–6]. Для обеспечения высоких динамических характеристик асинхронных электроприводов могут использоваться алгоритмы прямого управления моментом и потокосцеплением статора (Direct Torque Control – DTC) [6–9]. Характерной особенностью этих алгоритмов является автоматический выбор комбинации коммутируемых полупроводниковых ключей автономного инвертора [10–14]. Это вызывает переменную частоту коммутации и высокие искажения кривых тока и напряжения, что снижает уровень электромагнитной совместимости электроприводов c использованием алгоритмов прямого управления.
Современные требования к уровню электромагнитной совместимости ограничивают эмиссию высших гармоник тока и напряжения. Обеспечить высокие динамические характеристики асинхронных электроприводов и уровень электромагнитной совместимости можно за счет использования алгоритмов ПВ-модуляции [15–19]. Основная идея ПВ-модуляции заключается в формировании таких коммутационных функций полупроводниковых ключей автономного инвертора, которые обеспечивают желаемое положение результирующего вектора при постоянной частоте коммутации.
Структура автоматизированного электропривода на основе асинхронного двигателя. На рис. 1 представлен пример структуры АЭП. Элек- троснабжение и управление режимами работы электродвигателя осуществляются с помощью автономного инвертора, который собран по трехфазной мостовой схеме и выполнен на базе полностью управляемых биполярных транзисторов с изолированным затвором (insulated gate bipolar transistor – IGBT) ТА+, ТА–, ТВ+, ТВ-, ТС+, ТС–. В обратном направлении параллельно транзисторам включены диоды DА+, DА-, DВ+, DВ–, DС+, DС–. На входе автономного инвертора установлен фильтр, состоящий из двух конденсаторов С, между которыми равномерно распределяется напряжение Udc.
Система автоматического управления (САУ) электроприводом реализует алгоритм прямого управления. В состав системы САУ входит блок «Вычислитель асинхронного электродвигателя (АД)», обеспечивающий обратные связи по электромагнитному моменту и потокосцеплению статора. Этот блок в режиме реального времени по измеренным координатам электропривода ( U , I , U dc ) производит расчет действующих значений векторов электромагнитного момента M* и потокосцепления статора Ψ * s , а также рассчитывает величину текущего угла его поворота φ Ψ . Вычисленные значения M* , Ψ * s сравниваются с заданными M , Ψs . Рассогласования εΨ, ε M поступают на вход релейных регуляторов.
В каналах регулирования САУ, представленной на рис. 1, используются двухуровневый регулятор потокосцепления статора и трехуровневый регулятор электромагнитного момента. Выходные сигналы d Ψ s , d M релейных регуляторов и значение угла поворота вектора потокосцепления статора φ Ψ поступают на вход блока «Таблица переключений», по которому выбирается вектор результирующего напряжения автономного инвертора [16].
Рис. 1. Структура АЭП на основе асинхронного двигателя
После этого с помощью блока «Вычислитель U A U B U C » обеспечивается расчет фазных напряжений статора электродвигателя. Затем в блоке «Формирователь коммутационных функций (КФ)» в соответствии с выбранным вектором автоматически формируется КФ управления полупроводниковыми ключами ( SА+ , SА- , SB+ , SB- , SС+ , SС- ), при замыкании которых образуется выбранный вектор.
В процессе регулирования частоты вращения электродвигателя на выходе САУ формируется эталонный вектор, который плавно вращается во времени с угловой скоростью ω=2π f , где f – частота напряжения статора электродвигателя. В трех-
2 . ( k - 1 ) -
U ( t )= l -U dc e 3 , если k = 1,2, ..., 6
k 3 (2)
0, если k = 0, 7.
фазной системе координат эталонный вектор U может быть представлен выражением:
В табл. 1 приведены возможные комбинации включения полупроводниковых ключей автономного инвертора и формируемые при этих комбинациях векторы. Уровень напряжения на выходе автономного инвертора может принимать два значения: Udc /2 и - Udc /2 . Например, при включении транзисторов Т 1, Т 6 и Т 2 (т. е. S 1 = S 6 = S 2 = 1) напряжения между фазами и нулевой точкой звена постоянного тока равны: Ua 0 = U dc /2, U B 0 = - U dc /2 и U C 0 = - U dc /2 • Вектор выходно-
. 2 п
U (t ) = 2 Ua (t) e 0 + Ub (t) e "3" + Uc (t)
. 4 п j e 3
, (1)
го напряжения автономного инвертора в соответ ствии с выражением (2) равен Uk (t) = 2Udcej0 /з •
где Ua ( t ) , UB ( t ) , U C ( t ) - компоненты вектора напряжения в трехфазной системе координат.
Вектор выходного напряжения автономного инвертора может иметь только восемь стационарных положений: шесть активных и два нулевых, которые могут быть представлены как:
Линейные и фазные напряжения, формируемые на выходе автономного инвертора, могут быть опре-
делены как:
|
U AB |
1 |
r 1 |
- 1 |
0 |
Г ^ ! |
||||
|
U BC |
= U dc |
0 |
1 |
- 1 |
S 2 |
||||
|
_ U ca |
1 |
L- 1 |
0 |
1 |
J |
L S 3 |
J |
||
|
\U„ 1 |
r |
2 |
- 1 |
- 1 1 |
r |
" S 1 " |
|||
|
U B |
Udc =---- 3 |
- 1 |
2 |
- 1 |
S 2 |
. |
|||
|
u c _ |
L |
- 1 |
- 1 |
2 i |
L |
. S з i |
|||
;
Таблица 1
Возможные комбинации включения полупроводниковых ключей автономного инвертора
|
Базовый вектор |
Коммутационные функции |
Значение выходного напряжения |
Фазные напряжения |
Линейные напряжения |
||||
|
UA |
UB |
U C |
U AB |
U BC |
U CA |
|||
|
U о ( t ) |
S 4 = S 6 = S 2 = 1 |
U 0 ( t ) |
0 |
0 |
0 |
0 |
0 |
0 |
|
U 1 ( t ) |
S = S 6 = S 2 = 1 |
U 1 ( t ) = 3 v^ 0 |
2 Udc 3 |
Udc — 3 |
Udc — 3 |
Udc |
0 |
- Udc |
|
U 2 ( t) |
S 1 = S 3 = S 2 = 1 |
U 2 ( t ) = 3 Ud c 6J 3 |
Udc 3 |
Udc 3 |
2 U dc 3 |
0 |
Udc |
- Udc |
|
U 3 ( t ) |
S 4 = S 3 = S 2 = 1 |
. 2 к U 3 ( t ) = 3 Ud c eJ T |
U dc — 3 |
2 U dc 3 |
U dc — 3 |
- Udc |
Udc |
0 |
|
U 4 ( t ) |
S 4 = S 3 = S 5 = 1 |
U 4 ( t ) = 3 Ud c €] |
2 U dc 3 |
Udc 3 |
Udc 3 |
- Udc |
0 |
Udc |
|
U 5 ( t ) |
S 4 = S 6 = S 5 = 1 |
. к U 5 ( t ) = 3 U dc CJT |
U dc — 3 |
U dc — 3 |
2 U dc 3 |
0 |
- Udc |
Udc |
|
U 6 ( t ) |
S 1 = S 6 = S 5 = 1 |
. 5 к U 6 ( t ) = 3 U dc C3 T |
Udc 3 |
2 U dc 3 |
Udc 3 |
Udc |
- Udc |
0 |
|
U 7 ( t ) |
S 1 = S 3 = S 5 = 1 |
U 7 ( t ) = 3 U dc ej 0 |
0 |
0 |
0 |
0 |
0 |
0 |
Пояснение к алгоритму ПВ-модуляции
Таблица 2
|
Сектор (диапазон) |
т α |
Т β |
Время включения |
Время отключения |
Последовательность |
|
1 о < е < 60 ° |
3U a V3 U в 4 — 4 |
3 U 0 U « +---- а 2 |
^ 1 = T a + T, + T 0 5 3 = T b + T 0 S = T o 5 2 |
T 0 S 4 = T S 6 = T a + T 0 S 2 = T a + T b + T o |
U 0 – U 1 – U 2 – U 7 – U 2 – U 1 – U 0 |
|
2 60 <е< 120 ° |
3 U а + У3 U в 44 |
3 U а V3 U в + 44 |
S 1 = T a + T 0 S 3 = T a + T b + T 0 S 5 = T o 5 2 |
S 4 = T b + T o T 0 S 6 = T S 2 = T a + T b + T o |
U 0 – U 2 – U 3 – U 7 – U 3 – U 2 – U 0 |
Окончание табл. 2
|
Сектор (диапазон) |
Т α |
Т β |
Время включения |
Время отключения |
Последовательность |
|
3 120 <0< 180 о |
3 U 0Ua +— в а 2 |
3 U а V3 U в 44 |
S - T 1 2 S 3 = T a + T b + S 5 = T b + T |
S 4 - T a + T b + T 0 S 6 - 2 T 0 S 2 - T a + 2 |
U 0 – U 3 – U 4 – U 7 – U 4 – U 3 – U 0 |
|
4 180 <0< 240 о |
з иа V3 U р --- +----_ 44 |
3 U 0 Ua-- в а 2 |
S - T 1 2 S 3 - T a + T S 5 - T a + T b + T |
S 4 - T a + T b + T 0 S 6 - T b + T 0 S 2 - T 0 2 2 |
U 0 – U 4 – U 5 – U 7 – U 5 – U 4 – U 0 |
|
5 240 <0< 300 о |
3 U а V3 U в 44 |
3 U а V3 U в 4 - 4 |
T 0 S i - T b + 2 S 3 - T 3 2 S 5 - T a + T b + T |
T 0 S 4 - T a + 2 S 6 - T a + T b + T 0 S 2 - T 0 2 2 |
U 0 – U 5 – U 6 – U 7 – U 6 – U 5 – U 0 |
|
6 300 <0< 360 о |
3 U 0 U«-- в а 2 |
3 U а + V3 U в 44 |
S i - T a + t, + T S a, - T 3 2 S 5 - T a + T |
S - T 0 4 2 S 6 - T a + T b + T 0 S 2 - T b + T 0 |
U 0 – U 1 – U 6 – U 7 – U 6 – U 1 – U 0 |
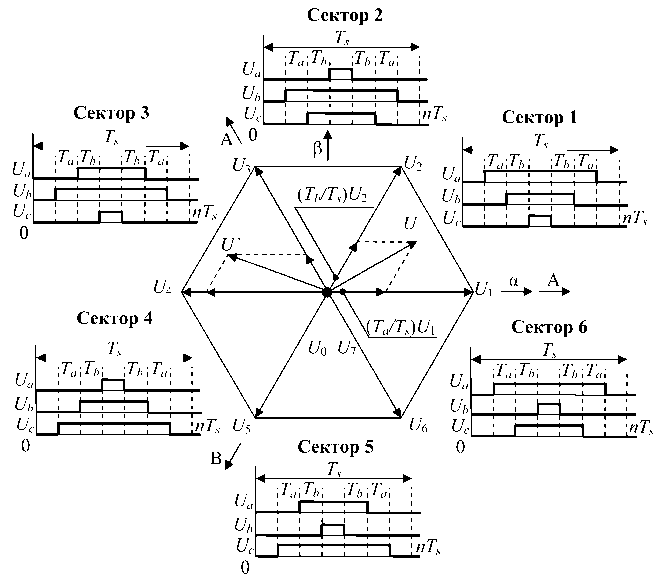
Рис. 3. Годограф выходного вектора напряжения автономного инвертора
Стационарные векторы выходного напряжения автономного инвертора не могут изменять свои амплитуду и фазу, поэтому автономный инвертор не может обеспечить плавное перемещение выходного вектора. Принцип пространственновекторной модуляции заключается в формировании выходного вектора напряжения с необходимой амплитудой и фазой путем последовательного переключения стационарных векторов в течение определенного времени на одном интервале модуляции.
Структура алгоритма пространственновекторной модуляции. Блок «ПВ-модулятор», реализующий алгоритм пространственновекторной модуляции и его связи с элементами САУ электропривода, изображен на рис. 1 в прямоугольнике, ограниченном штриховыми линиями. Внутренняя структура этого блока показана на рис. 2. Алгоритм ПВ-модуляции включает в себя
следующие этапы расчета: вычисление модуля и фазы эталонного вектора напряжения; определение сектора, в котором находится эталонный век-
тор напряжения; вычисление времени включения стационарных векторов напряжения T a , T b , T c ; формирование коммутационных функций управ-
ления полупроводниковыми ключами автономного
инвертора.
Компоненты вектора эталонного напряжения UА , UВ и UС на первом этапе алгоритма ПМ-модуляции преобразуются из трехфазной системы координат ( АВС ) в двухфазную (α-β). Такое преобразование осуществляется по следующему известному выражению [16]:
U;.
1 2 - 1
- 1
2 L о V3 л
U A
U B
UC
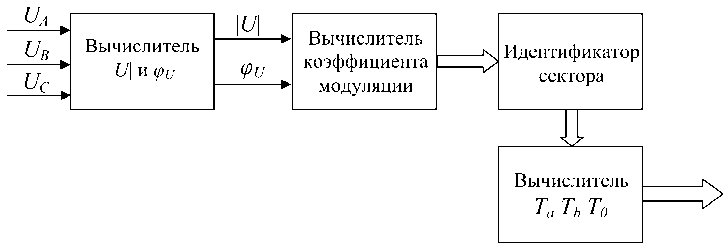
Рис. 2. Структура алгоритма ПВ-модуляции
Модуль и фаза эталонного вектора вычисляются следующим образом:
IU | = V Ua+ U2;
Ф U = tan 1
(t1
V Р/
.
ния автономного инвертора в координатах (α-β) можно представить как U = | u |(cos ro t + j sin ro t ) . С учетом того, что коэффициент модуляции равен K M = n| u| /2 Udc , выражение (11) для определения
интервалов включения активных векторов можно
Для формирования выходного вектора напряжения автономного инвертора необходимо знать, в каком секторе находится эталонный вектор выходного напряжения. Границы секторов образуют
представить выражением:
T a
T P
У3 K m Ts x л
активные векторы выходного напряжения автономного инвертора. Таким образом, координатная плоскость (α–β) разделяется на шесть условных секторов по 60˚ (табл. 2).
В любой момент времени эталонный вектор
напряжения находится между двумя активными векторами Uk и Uk+ 1, а его проекции на эти векто-
ры можно определить так:
U k = з U dc
(k — 1)n (k— 1)n cos----— + j sin----—
U k + 1 = 3 U dc
k n . . k n cos — + j sin— .
3 3
Результирующий выходной вектор напряже-
ния автономного инвертора получается путем по-
следовательного включения активных векторов:
UT s = U k T a + U k T ,
где Т а и Т b – интервалы включения активных векторов U k и U k+ 1 на модуляционном периоде T s . С учетом (8) и (9) эти интервалы могут быть найдены следующим образом:
Ta
T -
3 Ts
2 U dc
. k n sin
—
k n cos
—
sin
cos
U a
. u-J
. (11)
Результирующий вектор выходного напряже-
. k n sin
kл
— cos—
(k — 1)n
— sin----—
(k — 1)n cos
cos ( n o T s ) sin ( n o T s )
, (12)
где w t = ro nTs .
Длительность модуляционного периода T s при ПМ-модуляции и интервалов включения нулевых векторов T 0 можно вычислить как:
T = T o + 2 ( T a + T b ) ; T , = T — 2 ( T a + T ) . (13)
Интервалы включения Т a и Т - активных векторов U k и U k+ 1 в зависимости от величины компонентов эталонного вектора выходного напряжения автономного инвертора и его фазы представлены в табл. 2.
Если эталонный вектор находится в первом секторе, как это показано на рис. 3, то для формирования такого же результирующего вектора напряжения на выходе автономного инвертора на одном модуляционном периоде должны последовательно включаться транзисторы, обеспечивающие работу векторов U 0 – U 1 – U 2 – U 7 – U 2 – U 1 – U 0 в течение времени Т а , Т b и Т 0 . Временная диаграмма работы инвертора показана на рис. 3 около первого сектора.
Если на следующем модуляционном периоде эталонный вектор, формируемый САУ электропривода, переместится в третий сектор, то для его формирования на выходе автономного инвертора необходимо последовательно включать векторы U 0 – U 3 – U 4 – U 7 – U 4 – U 3 – U 0.
При этом третий и четвертый активные векторы должны быть включены в течение интервалов T _ v 3 U β T = - 3 U α - 3 U β
Ta = Tb = - α - , соответственно.
a 2 b 4 4
Такая временная диаграмма работы автономного инвертора показана в третьем секторе.
Исследование и анализ эффективности использования пространственно-векторной модуляции
Сравнивалась эффективность работы АЭП, имеющего прямое управление моментом и автоматическую коммутацию автономного инвертора (вариант 1), и АЭП с прямым управлением моментом и ПВ-модуляцией (вариант 2).
Исследования выполнялись на комплексе математических моделей электроприводов на основе асинхронного двигателя 4A250S4Y3 с возможностью исследования эффективности различных алгоритмов. Номинальная мощность электродвигателя 75 кВт, номинальное напряжение 380 В.
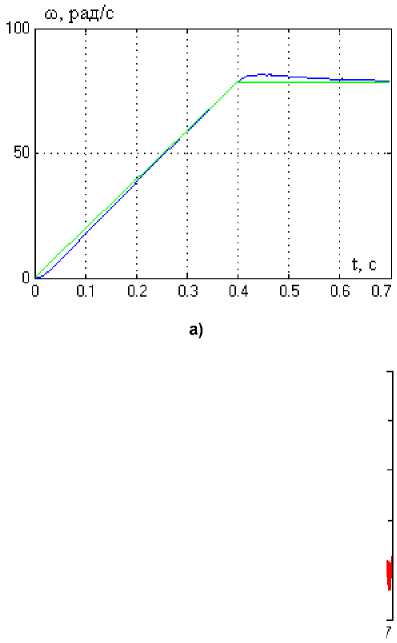
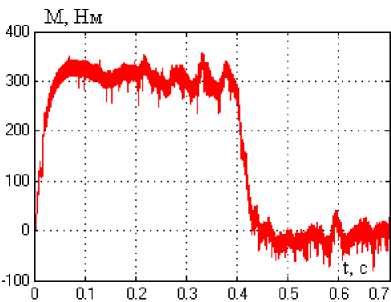
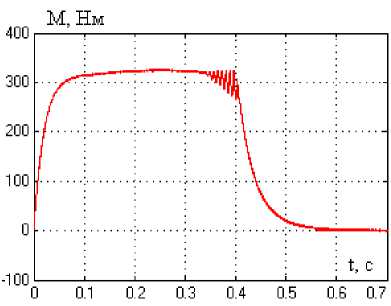
На рис. 4, а приведен график изменения частоты вращения в электроприводе при пуске (разгон с 0 до 78,5 рад/с). На рис. 4, б, в приведены графики электромагнитного момента АЭП первого и второго варианта. Оба электропривода обеспечивают высокие динамические характеристики, но при использовании ПВ-модуляции снижаются пульсации момента.
На рис. 5, а, в приведены графики выходного тока автономного инвертора (тока статора) IA и линейного напряжения UAB при работе электропривода в установившемся режиме. На рис. 5 б, г приведены их спектральные составы. Данные на рис. 5 получены при исследовании АЭП с прямым управлением и автоматической коммутацией. На рис. 6 представлены аналогичные данные, полученные при исследовании АЭП с прямым управлением и ПВ-модуляцией.
Из графиков на рис. 5 и 6 видно, что в электроприводе второго варианта снижается коэффициент нелинейных искажений тока на выходе автономного инвертора (Total Harmonic Distortion of Input current – THDI). При использовании ПВ-модуляции этот параметр равен 58,78 %, что на 36 % ниже, чем при автоматической коммутации автономного инвертора.
Линейное напряжение при автоматической коммутации состоит из двухполярных импульсов, при ПВ-модуляции – импульсы однополярные на полупериоде основной гармоники линейного напряжения, что позволяет значительно снизить коэффициент нелинейных искажений (Total Harmonic Distortion – THD).
Заключение. Результаты представленных исследований показывают, что использование алгоритмов пространственно-векторной модуляции в сочетании с алгоритмами прямого управления,
б)
в)
Рис. 4. Частота вращения (а) и электромагнитный момент при пуске АЭП в первом (б) и втором (в) вариантах
позволяет обеспечить высокие динамические характеристики автоматизированного электропривода, а также повысить эффективность преобразования электроэнергии в автономном инверторе, а именно – снизить коэффициенты нелинейных искажений тока и напряжения.
Дальнейшие исследования целесообразно проводить в направлении изучения эффективности использования пространственно-векторной модуляции по сравнению с алгоритмами широтно-импульсного управления (синусоидальной и с предмодуляцией
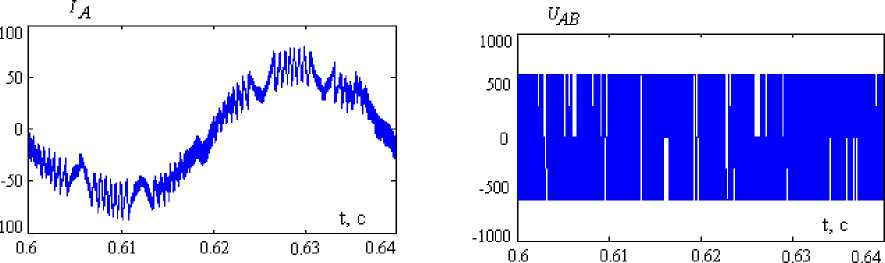
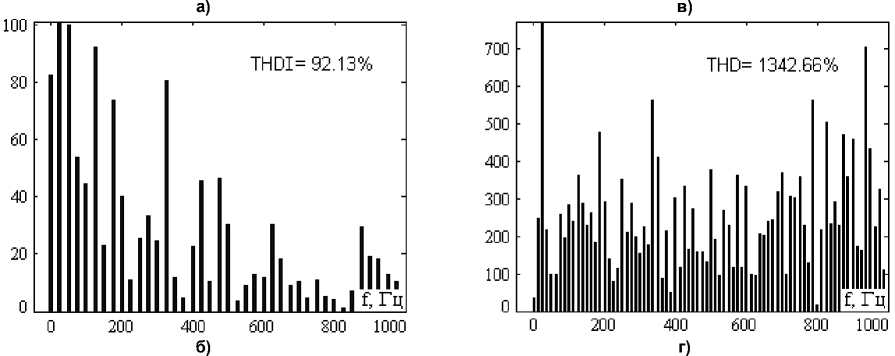
Рис. 5. Выходной ток автономного инвертора (а), линейное напряжение (в) и их спектральные составы (б, г) в электроприводе с прямым управлением и автоматической коммутацией
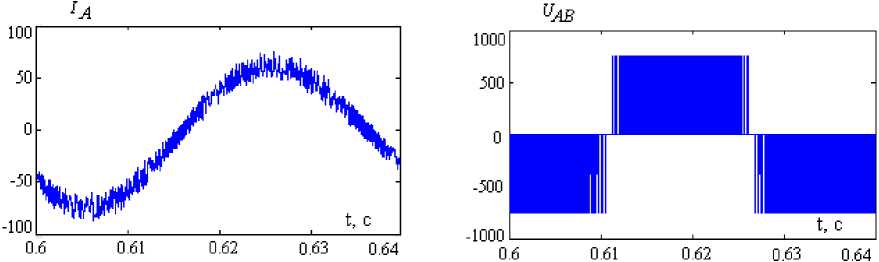

Рис. 6. Выходной ток автономного инвертора (а), линейное напряжение (в) и их спектральные составы (б, г) в электроприводе прямого управления и ПВ-модуляцией различной формы) и их сочетания с векторными алгоритмами и алгоритмами прямого управления. Интерес представляет также использование пространственно-векторной модуляции в режимах перемодуля-ции, которые обеспечивают повышение амплитуды выходного напряжения автономного инвертора.
Исследования эффективности алгоритмов управления электроприводами переменного тока с полупроводниковыми преобразователями проводились в Национальном минерально-сырьевом университете «Горный» (г. Санкт-Петербург) на кафедре электротехники, электроэнергетики, электромеханики.
Список литературы Повышение эффективности асинхронных электроприводов с прямым управлением моментом
- Козярук, А.Е. Структура, состав и алгоритмы управления высокоэффективных электроприводов газоперекачивающих агрегатов/А.Е. Козярук, Б.Ю. Васильев//Электротехника. -2013. -№ 2. -С. 43-51.
- Васильев, Б.Ю. Мехатронные перекачивающие комплексы на основе регулируемых электроприводов для подводного компремирования и транспортировки природного газа/Б.Ю. Васильев//Мехатроника, автоматизация, управление. -2013. -№ 3. -С. 55-60.
- Электроприводы переменного тока на базе непосредственных преобразователей частоты с ШИМ: монография/под общ. ред. Р.Т. Шрейнера. -Екатеринбург: Российский государственный профессионально-педагогический университет, Учреждение Российской академии образования «Уральское отделение», 2012. -223 с.
- Силовые полностью управляемые полупроводниковые преобразователи (моделирование и расчет)/под ред. Е.А. Крутякова. -СПб., 2003. -172 с.
- Виноградов, А.Б. Векторное управление электроприводами переменного тока/А.Б. Виноградов. -Иваново: Ивановский государственный энергетический университет имени В.И. Ленина, 2008. -298 с.
- Усольцев, А.А. Частотное управление асинхронными двигателями: учеб. пособие/А.А. Усольцев. -СПб.: СПбГУИТМО, 2006. -94 с.
- Козярук, А.Е. Алгоритмы управления энергоэффективным высокооборотным электроприводом газоперекачивающего агрегата/А.Е. Козярук, Б.Ю. Васильев//Известия вузов. Электромеханика. -2012. -№ 3. -С. 40-44.
- Васильев, Б.Ю. Исследование эффективности современных электроприводных газоперекачивающих агрегатов/Б.Ю. Васильев//Электронный научный журнал «Нефтегазовое дело». -2012. -№ 4. -С. 104-110. -http://www.ogbus.ru/authors/Vasiliev/Vasiliev_1.pdf.
- Пат. РФ. №2467462. Трехфазный активный выпрямитель. Патент на изобретение/А.Е. Козярук, Б.Ю. Васильев, А.О. Свириденко. -2011133095/07 заявл. 05.08.2011; опубл. 20.11.2012.
- Пат. РФ. 2476982. Способ управления электромагнитным моментом асинхронного электродвигателя с короткозамкнутым ротором/А.Е. Козярук, Б.Ю. Васильев. -2011132450/07 заявл. 01.08.2011; опубл. 27.02.2013.
- Study of a novel over-modulation technique based on space-vector PWM/H. Quan, Z. Gang, Z. Wu, Z. Liu//IEEE computer distributed control and intelligent environmental monitoring. -2011. -P. 295-298.
- Leedy, A. W. Harmonic Analysis of a space vector PWM inverter using the method of multiple pulses/A. W. Leedy, R.M. Nelms//IEEE transactions on industrial electronics. -2006. -№ 4. -P. 1182-1187.
- Васильев, Б.Ю. Повышение эффективности алгоритмов управления электроприводами методами нечеткой логики/Б.Ю. Васильев//Научно-технические ведомости СПбГПУ. -2012. -№ 3-2(154). -С. 229-233.
- Hendawi, E. Analysis, simulation and implementation of space vector pulse width modulation inverter/E. Hendawi, F. Khater, A. Shaltout//International conference on application of electrical engineering. -2011. -P. 124-131.
- Ogbuka, C. U. A Generalized Rectified Sinusoidal PWM technique for harmonic elimination/C.U. Ogbuka, M.U. Agu//The pacific journal of science and technology. -2009. -№. 2. -P. 21-26.
- Козярук, А.Е. Прямое управление моментом в электроприводе переменного тока машин и механизмов горного производства: учебное пособие/А.Е. Козярук, В.В. Рудаков. -СПб.: 2008. -99 с.
- Gupta, A.K. A general space vector PWM algorithm for multi-level inverter, including operation in overmodulation range/A.K. Gupta, A.M. Kambadkone//International electric machines and drives conference. -2005. -P. 2527-2533.
- Tripathi, A.A. Direct method of overmodulation with integrated closed loop stator flux vector control/A.A. Tripathi, M. Kambadkone, S.K. Panda//IEEE Trans. PE. -2005. -№ 20. -P. 1161-1168.
- Васильев, Б.Ю. Повышение энергоэффективности транспортировки природного газа средствами электроприводных газоперекачивающих агрегатов/Б.Ю. Васильев//Електро-механiчнi I енергозберiгаючi системи. -2012. -№ 3. -С. 267-268.
