Повышение эффективности использования машинно-тракторного агрегата путем оптимизации режимов управления топливоподачи в газодизеле

Автор: Соломкин А.П., Сизов И.Г., Захаров С.В., Захарова О.В.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 3 (48), 2014 года.
Бесплатный доступ
В статье рассмотрены основные особенности регулирования топливоподачи газообразного топлива при использовании газодизельного машинно-тракторного агрегата. Предложена схема всережимного управления подачей газовоздушной смеси в газодизеле.
Машинно-тракторный агрегат, трактор, двигатель, газодизель, топливоподача, регулирование
Короткий адрес: https://sciup.org/142142886
IDR: 142142886 | УДК: 629.366:
Efficiency improvement of machine-tractor units by optimization of gas diesel engine fuel consumption
The article describes the main features of gas consumption regulation in gas-diesel tractor operated machinery. A scheme for all-mode of gas mixture flow control in gas diesel engine is proposed.
Текст научной статьи Повышение эффективности использования машинно-тракторного агрегата путем оптимизации режимов управления топливоподачи в газодизеле
При переходе работы дизеля на газодизельный процесс возникает проблема согласования динамических характеристик двигателя с изменяющейся внешней нагрузкой машиннотракторного агрегата (МТА). При установке рейки топливного насоса на подачу постоянной величины запального топлива регулировка подачи газовоздушной смеси в цилиндры двигателя возлагается на тракториста-машиниста (оператора).
Тяговое сопротивление орудия в основном зависит от свойств почвы и скорости движения и может иметь отклонения от средней величины от 25 до 40 %, причем они могут быть как кратковременными, так и достаточно длительными [4]. В такой ситуации действие оператора трудно предугадать в связи с функциональными возможностями человека по приему и переработке информации, а также его реакции. По имеющимся данным, время реакции оператора при работе на колесном пропашном агрегате в междурядьях хлопчатника составляет в среднем 0,5 с [1]. При этом время, требуемое оператору для получения и переработки информации и принятия решения, складывается из:
t k t обн + t обр + t р , (1)
где tобн время обнаружения сигнала; t время обработки информации; t время для принятия решения.
Поэтому для обеспечения такой согласованности требуется изучение параметров переходных процессов, которые возникают при разгоне двигателя, осуществляемом оператором при нажатии на педаль акселератора, например, при увеличивающейся силе сопротивления и торможения механизмов навесной (прицепной) машины в результате изменения этого со- противления, обусловленного физико-механическими свойствами обрабатываемой поверхности.
Движение МТА в обобщенном виде может быть описано уравнением:
j.-^ м“ - "M-, dt где J момент инерции всех движущихся масс агрегата, приведенный к валу двигателя; частота вращения коленчатого вала, соответствующая поступательному движению МТА;
M и M крутящий момент двигателя и момент сопротивления на передвижение МТА, приведенный к валу двигателя.
Движение МТА Md (ty) можно представить также в виде:
М -И = M d о + M d №) , где MdQ - среднее значение крутящего момента при установившемся движении; Ml(о) - переменная составляющая момента, обусловленная колебаниями нагрузки (избыточное усилие).
Текущее значение хода педали акселератора х при работе, осуществляемое оператором: x x x, где x установившееся значение хода педали, соответствующее постоянному значению M ; x переменная составляющая хода педали, обусловленная моментом M .
Следуя работе [2], избыточное усилие, возникающее при разгоне, можно представить в виде:
Ризб (t) = mпр/dv , dt где m суммарная приведенная движущаяся масса МТА; v и t – скорость и время.
Время разгона будет равно:
dv t^m Л pm
.
От продолжительности процесса разгона зависит способность трактора переходить от одного режима работы к другому, а это определяет продолжительность наиболее эффективного рабочего цикла трактора и его производительность.
Для определения времени разгона t правую часть уравнения (2) нужно проинтегриро- вать от некоторой начальной vн скорости и vк – конечной скорости в конце разгона. Для упрощения принимаем допущение о том, что в процессе Р3б(t) = const., тогда:
, vf dv тП р ( vK -Vh ) m ( V k -Vh )
tm p пр v изб изб дв с
н где Рс – тяговое сопротивление орудия.
Как видно из выражения (3), время t уменьшается с уменьшением приведенных масс и с увеличением Рдв.
С учетом зависимости (1) время разгона с учетом времени принятия решения, необходимого для оператора, можно представить в виде схемы (рис. 1):
Промежуток между временем t реш и t разгон соответствует ходу педали акселератора x (4) от положения x при М .
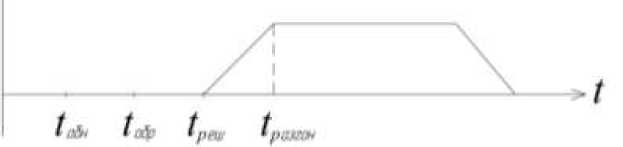
Рис. 1. Время, затрачиваемое оператором при ручном управлении подачи газовоздушной смеси
Многие авторы (Генфельбейн, Шакиров и др.) склоняются к мнению, что уравнение движения агрегата по возмущающемуся воздействию может быть представлено в виде:
(Ta-p^ )> = " Ц-П, (4)
где Т постоянная времени агрегата, характеризует инерционные свойства двигателя и по- ступательно движущихся масс; р d оператор дифференцирования, где t – время регули-dt рования; коэффициент самовыравнивания объекта регулирования (в упрощенном виде
0); безразмерное значение частоты вращения коленчатого вала двигателя;
й)
М d безразмерная величина изменения неустановившейся нагрузки, где M
MM d dd переменная составляющая момента, обусловленная колебаниями нагрузки; коэффициент неравномерности перемещения педали акселератора.
Т Ja a M кн , где номинальная частота вращения коленчатого вала двигателя; М номинальный крутящий момент двигателя.
Передаточная функция управлением топливоподачи может быть представлена в виде:
WP (pp ) = —1 ---. (5)
Tap
В обобщенном виде изменение момента сопротивления МТА и реакцию оператора при регулировании подачи газовоздушной смеси можно представить в виде графика (рис. 2).
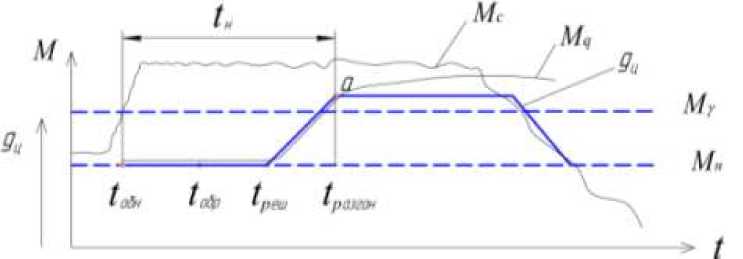
Рис. 2. Изменение момента сопротивления ( М с ) и цикловой подачи ( q ц ) газовоздушной смеси при ручном регулировании
На рисунке M номинальный крутящий момент двигателя; M крутящий момент при самовыравнивании; t время запаздывания реакции оператора на изменяющееся сопротивление M (время нечувствительности).
За период t двигатель снижает обороты, по регуляторной характеристике M увеличивается. Оператор, если не успевает увеличить подачу топлива, должен перейти на более низкую передачу. Потеря производительности МТА при этом будет зависеть от периодично- сти изменения возмущающих воздействий (Рс) с периодом колебаний Т = —, где го - часто- та возмущающих воздействий.
Известно также [1], что сложную периодическую функцию q>g = f ( f ) можно разложить на гармонические составляющие с помощью ряда Фурье:
а
Ф = — + ^ ( ак • cos krot + Ьк sin ktot ) , в 2 K5
где к - порядок гармоники; а0, ак, Ьк - коэффициенты Фурье [1].
Чтобы исключить негативное влияние оператора, необходимо в системе регулирования использовать передаточную функцию (5) в системе управления топливоподачи (газовоздушной смеси).
При выходе Мс за пределы момента сопротивления M уравнение (4) будет иметь вид:
(Ta'P^ У> =
Решение дифференциального уравнения показывает относительное изменение частоты вращения коленчатого вала, когда требуется устранить запаздывание увеличения подачи газовоздушной смеси в цилиндры двигателя пропорционально увеличению момента сопротивления. Даже при резком увеличении момента сопротивления регулирование должно обеспечить повышение крутящего момента путем обеспечения увеличения цикловой подачи топлива. Тогда уравнение движения (4) будет иметь вид:
(Ta-P^ y^
Если привязать уравнение движения не к положению хода акселератора, а с регулятором топливного насоса, то в общем виде его можно представить уравнением Лагранжа 2 рода [3]:
М d =M с^К q'x ;
. d 2 x , , dx , _ r , , . 2
mp -T2 kk-cc-x = [mrp (Fo +iHx)]0 , tt где Md - крутящий момент на валу двигателя; к - коэффициент пропорциональности, определяемый по скоростной характеристике двигателя совместно с х; х - текущее значение положения педали акселератора; kp - коэффициент пропорциональности; с - жесткость пружины регулятора; mrp - масса грузов регулятора; r0 - радиус вращения грузов регулятора; iH - передаточное отношение между перемещением грузов регулятора и муфты регулятора; ю - частота вращения коленчатого вала двигателя.
Производительность МТА от N e можно представить в виде [1]:
N „ eн
W 27 ,, N М/ /тр Т см1 ,
Ka где NeH - номинальная эффективная мощность двигателя; Ка - удельное сопротивление агрегата на метр рабочего захвата; Nee - степень использования на рабочем режиме номинальной мощности двигателя; ттр - КПД трактора при рабочем режиме; Тсм - полное сменное время; т - коэффициент использования времени смены.
Определив составляющую потерь мощности се< в течение времени t H, мы получаем возможность установить результат по производительности МТА.
Решить проблему регулирования подачи газовоздушной смеси можно, привязав дроссельную заслонку подачи газа к всережимному регулятору топливного насоса. Эта идея реа- лизована на схеме (рис. 3) и подтверждена патентом на полезную модель RU № 88070 U1 Система питания газодизеля от 27.10.2009.
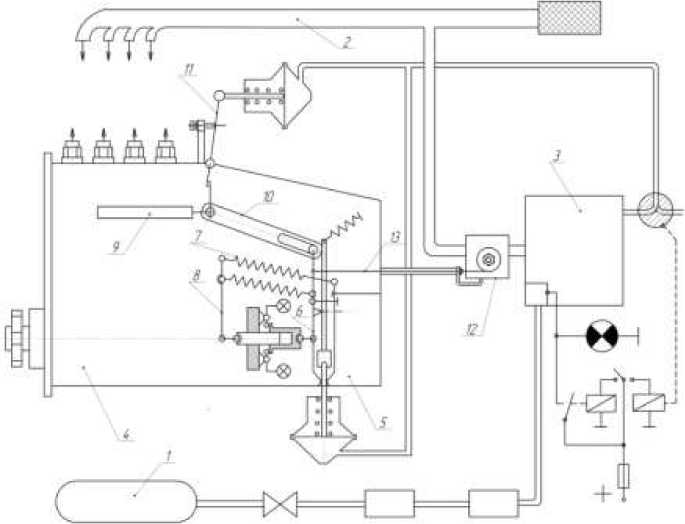
Рис. 3. Система питания газодизеля:
1 источник газового топлива; 2 впускной коллектор двигателя; 3 редуктор газовый;
4 топливный насос высокого давления; 5 центробежный регулятор; 6 рычаг центробежного регулятора; 7 главная пружина центробежного регулятора; 8 рычаг управления подачи топлива;
9 рейка топливного насоса; 10 – тяга рейки топливного насоса; 11 – рычаг механизма установки запальной дозы; 12 – дроссельная заслонка подачи газа, 13 – трос управления дроссельной заслонкой
При переходе на газодизельный режим рейка 9 топливного насоса посредством рычага 11 механизма установки запальной дозы устанавливается в положение, обеспечивающее минимально необходимую цикловую подачу запальной порции жидкого топлива. Рычаг 6 центробежного регулятора топливного насоса, который одновременно связан с рычагом управления подачей топлива 8 посредством главной пружины 7 центробежного регулятора и с дроссельной заслонкой подачи газа посредством троса 13, разобщается от тяги 10 рейки 9 топливного насоса.
При увеличении нагрузки газодизеля в работу включается подсистема автоматического регулирования подачи газообразного топлива. Автоматическое регулирование подачи газа в соответствии с нагрузочным и скоростным режимом работы двигателя обеспечивается положением рычага 6 центробежного регулятора, управляющего соединенной с ним дроссельной заслонкой дозатора подачи газа 12, осуществляющим всережимное поддержание заданного скоростного и нагрузочного режима работы двигателя.
Результаты испытаний показали, что система питания газодизеля имеет более простую конструкцию, высокую надежность, автоматизацию перевода двигателя на газодизельный процесс, оптимизирует подачу газообразного топлива посредством всережимного управления подачей при изменении скоростного и нагрузочного режимов работы газодизеля, улучшает топливную экономичность двигателя за счет замещения жидкого топлива, снижает токсичность отработавших газов двигателя. Производительность машинно-тракторного агрегата при работе по газодизельному циклу оказалась практически одинакова с дизельным циклом.
