Повышение эффективности подавления помех за счет коррекции частотных характеристик приемных каналов в навигационной аппаратуре потребителей

Автор: В.Н. Тяпкин, В.Н. Ратушняк, Д.Д. Дмитриев, А.Б. Гладышев
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 1, 2018 года.
Бесплатный доступ
Пространственно-временная обработка сигналов в адаптивных радиоэлектронных системах, в том числе и навигационных, остается предметом интенсивных исследований, так как позволяет повысить эффективность приема полезных сигналов в условиях воздействия естественных или преднамеренных помех. Библиография по этой тематике весьма обширна и включает в себя большое число статей научного и прикладного характера, диссертаций, монографий, патентных материалов. Значительная часть этих работ имеет ссылки на монографии Р. Монзинго и Б. Уидроу, в которых изложены основные принципы, критерии и алгоритмы пространственно-временной обработки сигналов. До настоящего времени развитие пространственно-временной обработки сигналов во многом сдерживалось несовершенством элементной базы. Применение в современной навигационной аппаратуре потребителей быстродействующих сигнальных процессоров, реализующих перспективные методы и алгоритмы цифровой обработки сигналов, предоставляет возможность цифровыми способами формировать требуемую диаграмму направленности антенной системы и корректировать частотные характеристики приемных каналов, реализовывать сложные алгоритмы оптимальной обработки полезных сигналов, оперативно управлять основными режимами работы аппаратуры. Одним из важнейших приложений пространственно-временной обработки сигналов является подавление помеховых сигналов, а его эффективность напрямую зависит от степени межканальной корреляции этих сигналов, принятых антенными элементами адаптивной антенной решетки. Для максимизации коэффициента подавления помех требуется принятие мер по выравниванию частотных и фазовых характеристик приемных трактов и высокой точности вычисления весовых коэффициентов. В статье рассматриваются вопросы пространственной фильтрации помех при использовании адаптивного компенсатора помех с учетом коррекции частотных характеристик приемных каналов средств спутниковой навигации. Представлен градиентный алгоритм пространственной компенсации помех, а также влияние адаптивной коррекции частотных характеристик приемных каналов на качество подавления помех. Продемонстрировано формирование диаграммы направленности многоэлементной адаптивной антенной решетки при пространственном подавлении помех путем моделирования в среде Matlab.
Адаптивный автокомпенсатор, адаптивный корректор частотных характеристик, помехоустойчивый ГНСС-приемник, устройство подавления помех
Короткий адрес: https://sciup.org/14114753
IDR: 14114753 | УДК: 621.396.669.8 | DOI: 10.26732/2618-7957-2018-1-30-37
Increase of noise suppression efficiency due to correction of frequency characteristics of receiving channels in the navigation equipment of consumers
Space-time signal processing in adaptive electronic systems, including navigation, remains the subject of intensive research, as it allows to improve the efficiency of receiving useful signals under the influence of natural or intentional interference. The bibliography on this subject is very extensive and includes a large number of articles of scientific and applied nature, dissertations, monographs, patent materials. Much of this work has references to monographs by R. Monzingo and B. Widrow, which set out the basic principles, criteria and algorithms of spatial-temporal signal processing. To date, the development of space-time signal processing is largely constrained by the imperfection of the element base. The use of modern navigation equipment consumers high-speed signal processors that implement advanced methods and algorithms of digital signal processing, provides the ability of digital methods to form the desired beam pattern of the antenna system and to adjust the frequency characteristics of the reception channels, to implement complex algorithms for optimal processing of useful signals, operative to control the main operation modes of equipment. One of the most important applications of space-time signal processing is noise suppression, and its effectiveness depends on the degree of inter-channel correlation of these signals received by antenna elements of the adaptive antenna array. To maximize the coefficient of interference suppression required the adoption of measures on alignment of frequency and phase characteristics of the receiving circuits, and high precision computation of weighting coefficients. The article considers the questions of spatial filtering of the interference when adaptive interference compensator adjusted frequency characteristics of the receiving channels, and means of satellite navigation. Gradient algorithm of spatial compensation of noise, and also influence of adaptive correction of frequency characteristics of receiving channels on quality of suppression of noise is presented. The formation of a directional diagram of a multi-element adaptive antenna array with spatial noise suppression is demonstrated by modeling in the Matlab environment.
Текст статьи Повышение эффективности подавления помех за счет коррекции частотных характеристик приемных каналов в навигационной аппаратуре потребителей
Основной задачей совершенствования существующих алгоритмов пространственного подавления помех является разработка способов компенсации временных задержек между разнесенными антенными элементами в адаптивной
антенной решетке (ААР) с учетом согласования геометрии расположения антенных элементов с плоским волновым фронтом принимаемых помеховых колебаний, коррекции частотных характеристик приемных каналов, оптимизации вычислительных операций при адаптации к помехам различного вида и обработке полезных сигналов.
Некоторое повышение степени корреляции принятой аддитивной смеси сигналов и помех в приемных каналах навигационного приемника достигается за счет коррекции частотных характеристик и калибровки группового времени задержки сигналов компенсационных приемных каналов под основной приемный канал. Начальная временная обработка принимаемых сигналов основана на использовании схемы выравнивающего фильтра с конечной импульсной характеристикой (КИХ-фильтра). Применение КИХ-фильтров позволяет добиться минимальной разности частотных характеристик каналов между основным и компенсационным каналами.
Для получения высоких характеристик точности навигационных измерений требуется калибровка группового времени запаздывания (ГВЗ) и фазовых сдвигов широкополосных навигационных сигналов, что приводит к необходимости минимизации погрешности параметров формируемых опорных сигналов. Нужно учесть все задержки, возникающие в приемных трактах, начиная от приемных антенн до блока цифровой обработки сигналов, с точностью до единиц градусов по фазе несущей частоты сигнала [1, 2].
Необходимо отметить, что межканальная калибровка устраняет аппаратурную систематическую погрешность навигационного приемника и является достаточной в том случае, когда фазовые центры антенных элементов находятся в непосредственной близости друг к другу. Однако при построении ААР из большого количества антенных элементов или решении некоторых специфических задач измерения пространственной ориентации антенные элементы разнесены на достаточно большое расстояние друг от друга (более чем несколько длин волн полезного сигнала). В результате этого диаграмма направленности (ДН) ААР приобретает многолепестковый харак тер, обусловленный возникновением интерференционных максимумов и минимумов. Кроме того, возникает временная задержка распространения сигнала между антенными элементами, что уменьшает коэффициент корреляции помехи в приемных каналах (рис. 1).
Этот относительный временной сдвиг колебаний сигнала помехи на входах приемных каналов можно оценить по выражению tз = (d cos(θ) / c) = ΔD/c, (1)
где d - расстояние между фазовыми центрами ан- 31
тенн.
Коэффициент подавления помехи одним компенсационным каналом с учетом временного сдвига помеховых колебаний принимает следующий вид:
к п = 1/(1 - р2) - 1/(А A f„ t , ), (2)
где t з – время задержки помех между приемными антеннами; K п – коэффициент подавления помех;
ρ – коэффициент корреляции помех; Δ f пр – ширина полосы пропускания приемника.
На рис. 2 показана зависимость максимального достижимого коэффициента подавления помех от длины базы одноканального автокомпенсатора помех (два приемных канала) при максимальном времени задержки помехи (при θ = 0° – наихудший вариант воздействия преднамеренных помех) между приемными антеннами.
Адаптация к помехам может быть реализована несколькими способами в зависимости от выбора целевой функции, критерия поиска, но все они сводятся (с точностью до постоянного множителя) к винеровскому решению [3–7]. Полный алгоритм работы ААР предусматривает нацеливание и удержание ДН ААР в пространстве в на-
Source of interference
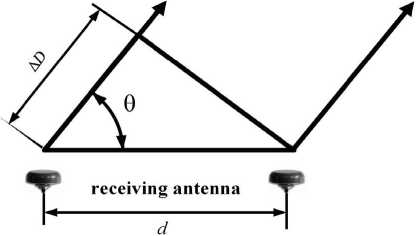
Рис. 1. Межканальная задержка сигналов приемных каналов
Том 2
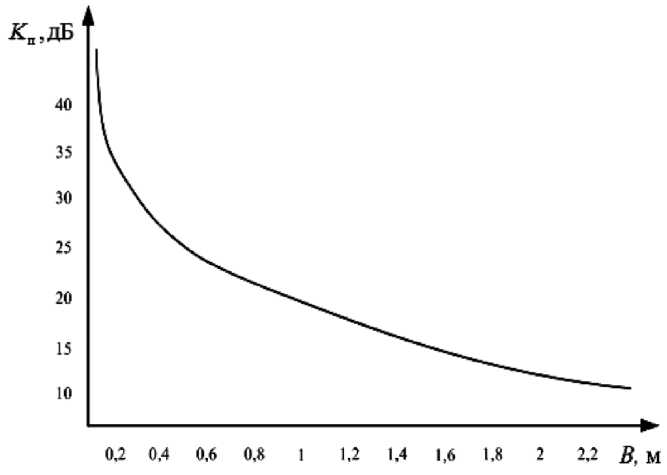
Рис. 2. Зависимость коэффициента подавления помех от длины базы однобазового автокомпенсатора
правлении прихода полезного сигнала при одновременном подавлении пространственных помех любой структуры (формирование нулей на помеху в диаграмме направленности ААР).
Эффективным и комплексным решением такой задачи является подход, основанный на совместной работе систем автокомпенсатора (АКП) с адаптивными корректорами частотных характеристик при условии, что адаптация АКП и кор- рекция частотных характеристик осуществляются под общую целевую функцию. Например, в качестве критериев целевой функции может использоваться минимум мощности помех, максимум отношения сигнал/шум или минимум дисперсии шума на выходе АКП [8]. При этом во всех случаях значения оптимальных весовых коэффициентов будут зависеть не только от характеристик различного вида помех, пространственных направлений на источники полезных и помеховых сигналов, их динамики изменения, но и также от согласования геометрии расположения антенных элементов с волновым фронтом принимаемых помеховых колебаний.
Коррекция приемных каналов осуществляется при помощи канальных КИХ-фильтров, имеющих центральный отвод линии задержки (ЛЗ) и остальные отводы ЛЗ, расположенные по обе стороны от центрального (рис. 3).
Коррекцию частотных характеристик приемных каналов осуществляют при помощи градиентного алгоритма расчета весовых коэффициентов КИХ-фильтров w T ( k n ) ( t i ) в соответствии с максимальной компенсацией различий частотных характеристик, времени задержек сигналов в полосе пропускания приемных каналов и пространственной компенсацией помех.
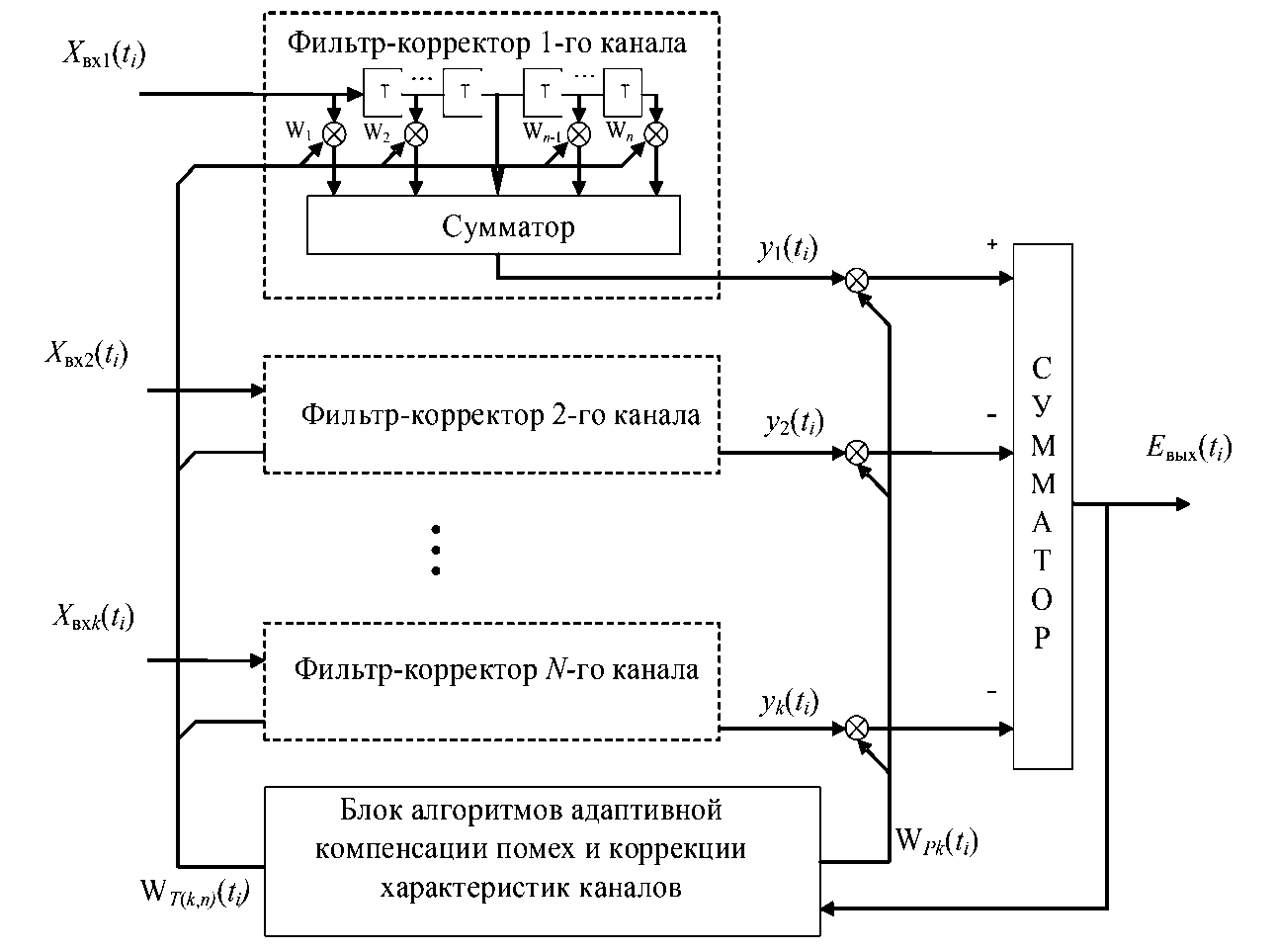
Рис. 3. Структурная схема адаптивного автокомпенсатора помех
Весь градиентный алгоритм коррекции частотных характеристик и пространственной фильтрации помех описывается следующими выражениями:
W T ( k , n ) ( t^ =
= W T ( k , n ) ( t i — 1) + Цх \ ( t i )a k ( ti) , (3)
где W T ( k n ) ( t i - 1) - весовой коэффициент КИХ-фильтра к -го компенсационного канала, рассчитанный на предыдущей итерации; n - номер дискретного отсчета линии задержки; р - шаг адаптивного алгоритма сходимости; х k ( ti ) – вектор входных сигналов в k -м компенсационном канале; α k ( ti ) – ошибка оценивания процесса адаптации, которая описывается выражением:
а k ( t i ) = d k ( t i ) - W k ( t i - 1) х k ( t i ) , (4)
dk ( ti ) – требуемый выходной сигнал.
Выходной сигнал КИХ-фильтра будет равен:
N
У k ( t i ) = Z х k ( t i ) XV T ( k , „ ) ( t . ) (5)
После коррекции частотных характеристик компенсационных каналов для пространственной фильтрации помех определяют комплексные весовые коэффициенты W Р ( k ) ( t i ) и далее, перемножая их с выходной выборкой сигналов КИХ-фильтров каждого канала, формируют «провалы» в результирующей ДН в направлении на постановщиков активных помех [8, 10], таким образом, реализуется градиентный алгоритм пространственной фильтрации помех:
W р ( k ) ( t i ) = W р ( k ) ( t - 1) + ц yk ( t i ) а к (^.), (6)
где W Р ( k ) ( t i - 1) — весовой коэффициент к -го компенсационного канала, рассчитанный на предыдущей итерации; μ – шаг адаптивного алгоритма сходимости; у k ( ti ) – вектор выходного сигнала КИХ-фильтра в k -м компенсационном канале; α k ( ti ) – ошибка оценивания процесса адаптации.
Выходной сигнал пространственного фильтра принимает вид
Е вых ( t . ) = У 1 ( t . ) - у k ( t . ) W Р ( к ) ( t i ). (7)
Данное выражение является откликом пространственного фильтра помех.
Такое построение архитектуры адаптивного автокомпенсатора с основным выделенным каналом позволяет эффективно повысить пространственное подавление помех различной структуры за счет предварительного умножения вычисленных весовых коэффициентов для каждого дискретного отсчёта линии задержки корректирующих КИХ-фильтров на входные сигналы компенсационных каналов, таким образом осуществляя коррекцию характеристик компенсационных каналов и максимизацию межканального коэффициента корреляции помех.
Моделирование пространственно-временной обработки сигналов 33
Экспериментальные исследования алгоритма адаптивной коррекции каналов с АКП производились на основании цифрового моделирования группы неидентичных каналов ААР с последующей коррекцией этих каналов. При моделировании для получения объективных данных, близких к реальным условиям, формировались помехи различной структуры (узкополосные, широкополосные) с разным набором параметров (число помех каждого вида, уровни мощности, полосы частот и т.п.). Наиболее сложными и эффективными являлись широкополосные шумоподобные помехи. Разброс характеристик каналов моделировался введением специальных модельных искажений для входной смеси каждого приемного канала. Модельные искажения формируются при помощи КИХ-фильтров первого порядка с изменяемыми (для разных каналов) комплексными коэффициентами. В результате фильтрации в таких КИХ-фильтрах изменяются АЧХ, ФЧХ и ГВЗ компенсационных приемных каналов во всей полосе частот.
Подавление помех осуществлялось за счет подстройки пространственных коэффициентов, а коррекция характеристик компенсационных каналов реализовалась подстройкой коэффициентов временной части компенсатора. Обе петли корреляционных обратных связей подстройки коэффициентов реализуют минимизацию ошибки коррекции характеристик каналов и уровня действующих помех.
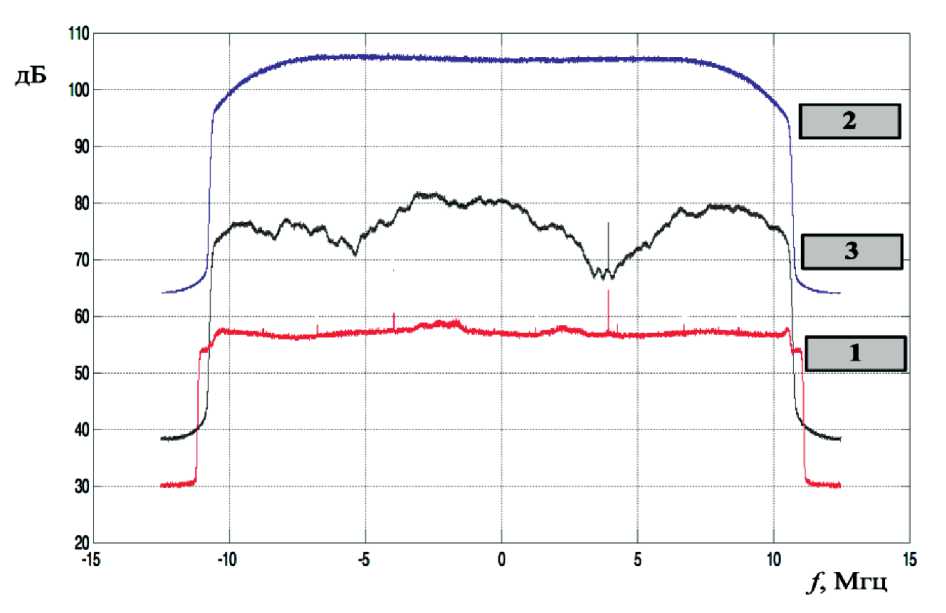
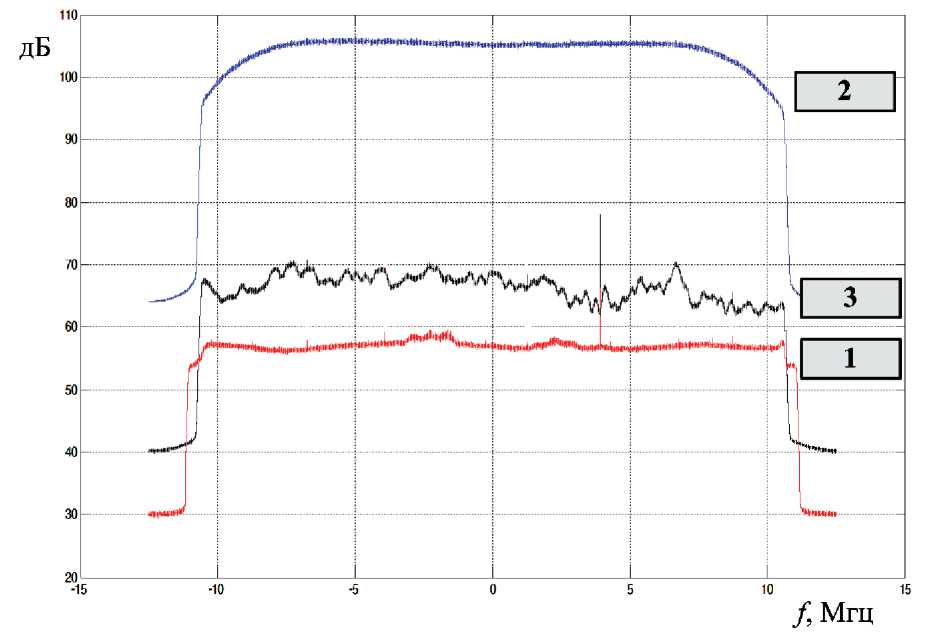
На рис. 4 показаны спектры широкополосной помехи (2), имитируемого навигационного сигнала на 4 МГц (1) без помех и его спектр после подавления помех (3). Разброс значений коэффициента подавления помех в полосе частот навигационных сигналов объясняется различием частотных характеристик приемных каналов, различным временем задержки распространения помехового колебания между разнесенными приемными каналами (рис. 4 а ). Коэффициент подавления составил в среднем 20–25 дБ.
Из анализа выходных сигналов адаптивного автокомпенсатора помех видно, что в автокомпенсаторе без коррекции частотных характери-
Том 2
-
а) 1 – спектр сигнала 1-го канала без помех; 2 – спектр помехи; 3 – спектр пространственной обработки помехи
-
б) 1 – спектр сигнала 1-го канала без помех; 2 – спектр помехи; 3 – спектр пространственной обработки помехи с коррекцией частотных характеристик приемных каналов
Рис. 4. Спектры пространственно-временной обработки сигналов стик компенсационных приемных каналов остатки от помех выше, чем в случае с коррекцией характеристик, и степень подавления помех увеличивается по мере уменьшения рассогласования АЧХ/ФЧХ компенсационных каналов по отношению к основному приемному каналу на 10–15 дБ (рис. 4б), при этом в результате коррекции частотных характеристик компенсационных каналов время адаптации к помеховой обстановке возрастает в 2–3 раза.
Рассмотрим формирование ДН многоэлементной ААР при пространственном подавлении помех путем моделирования в среде Matlab.
Созданная модель позволяет формировать ААР произвольной конфигурации с расположением антенных элементов на плоскости и на произвольных пространственных кривых или поверхностях. В зависимости от выбора конфигурации, которая определяет общий раскрыв ААР, межэлементного расстояния, количества антенных элементов и их расположения в самой ААР, возможно сформировать заданную ДН ААР, удовлетворяющую требованиям по точности навигационных измерений и уровню помехоустойчивости навигационного приемника. Вместе с тем для устранения интерференционных эффектов многоэлементной ААР, необходимо учитывать следующие свойства:
-
1) необходимое число элементов главным образом зависит от уровня и количества боковых лепестков (оно обычно намного меньше того, которое требуется при эквидистантном расположении элементов);
-
2) разрешающая способность в основном определяется размерами апертуры ААР и изменением пространственно-временного сигнала в самой апертуре;
-
3) коэффициент направленного действия формируемых лучей, направленных на источники полезных сигналов ААР, пропорционален числу используемых элементов;
-
4) результирующая ДН ААР во многом зависит от выбора и использования ДН одиночного антенного элемента.
В модели приняты следующие ограничения: главный максимум ДН ориентирован на источник сигнала. Фронт волны, идущей от источника полезного сигнала и широкополосной помехи, считаем плоским. В качестве помехового сигнала использована широкополосная помеха.
На рис. 5 представлена плоская 12-элементная ААР, а на рис. 6 диаграмма направленности одиночного элемента ААР. При таком расположении элементов со сравнительно большим (в несколько длин волн) средним межэлементным расстоянием, когда эффекты взаимного влияния элементов пренебрежимо малы, можно получить требуемую ДН ААР с узким главным
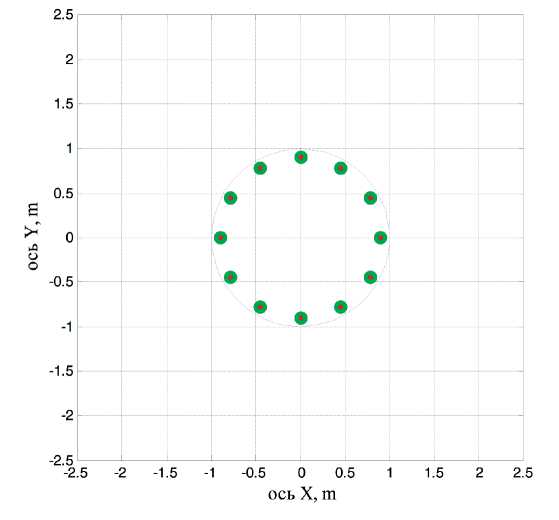
Рис. 5. Конфигурация 12-элементной адаптивной антенной решетки
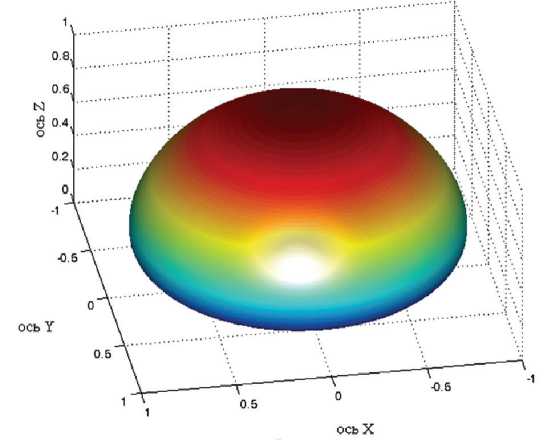
Рис. 6. Диаграмма направленности одиночного элемента адаптивной антенной решетки
лепестком и достаточно невысоким уровнем боковых лепестков.
ДН меняется в соответствии с условиями функционирования - пространственно-временными характеристиками источников принимаемых сигналов и помех. Формирование ДН ААР осуществляется за счет изменения амплитуднофазового распределения, а именно значений весовых коэффициентов приемных каналов. Таким образом, осуществляется образование «провалов» в результирующей ДН в направлении на источник помех и формирование лучей в направлении на источник полезного сигнала (рис. 7).
Важно заметить, что формирование максимумов ДН обеспечивает прием навигационных сигналов и очень эффективно снижает влияние
Том 2
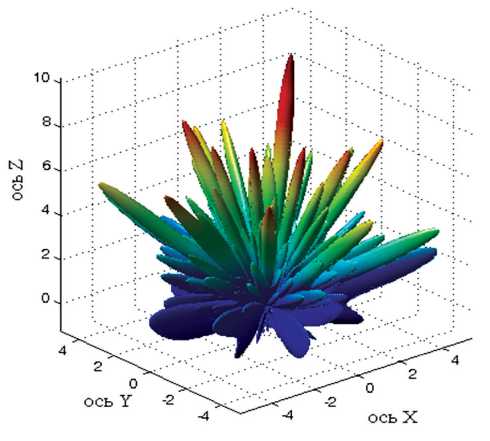
Рис. 7. Результирующая диаграмма направленности при адаптации к помехам
многолучевости в сложных условиях отражений от земной поверхности, зданий, строений и прочих объектов.
Заключение
Таким образом, применение коррекции частотных характеристик компенсационных каналов компенсирует межканальную задержку принимаемых сигналов ААР и согласовывает геометрию расположения антенных элементов с плоским волновым фронтом принимаемых помеховых колебаний, повышает степень межканальной корреляции помех, что в целом улучшает эффективность подавления различного вида помех.
По результатам исследований компенсация межканальной задержки сигналов в многоканальном навигационном приемнике при помощи коррекции характеристик приемных каналов позволяет увеличить коэффициент подавления помех на 15–20 дБ. Необходимо отметить, что увеличение порядка КИХ-фильтра (более 10) не дает большого прироста коэффициента подавления, однако при этом существенно возрастают вычислительные затраты.
Исследование выполнено за счет гранта Российского научного фонда ( проект №16-19-10089 ).
Список литературы Повышение эффективности подавления помех за счет коррекции частотных характеристик приемных каналов в навигационной аппаратуре потребителей
- Space-time processing of signals in angle measurement navigation receivers. // V. N. Tyapkin, V. N. Ratushnyak, D. D. Dmitriev, V. G. Konnov. International Siberian Conference on Control and Communications, SIBCON 2016 – Proceedings 2016. P. 7491671.
- Monzingo R. A., Miller T. U. Adaptive antenna arrays. Introduction to the theory: Trans. From the English. M. : Radio and communication, 1986.
- Widrow B., Stirnza S. Adaptive signal processing. Trans. With the English. M. : Radio and Communication, 1989. 440 p.
- Jigan V. I. Adaptive filtering of signals. Theory and algorithms. M. : Technosphere, 2013. 528 p.
- Возможные варианты построения помехозащищенной навигационной аппаратуры, способной определять пространственную ориентацию объекта / В. Н. Тяпкин, Ю. Л. Фатеев, Д. Д. Дмитриев, Е. Н. Гарин, В. Н. Ратушняк // Радионавигационные технологии. 2015. С. 48–53.
- Синтез алгоритма защиты от помех в восьмиэлементной фазированной антенной решетке / Ю. Л. Фатеев, Д. Д. Дмитриев, В. Н. Тяпкин, В. Н. Ратушняк // Радиотехника. 2014. № 1. С. 29–34.
- Компенсация межканальных временных задержек в помехоустойчивой угломерной навигационной аппаратуре потребителей / В. Н. Тяпкин, В. Н. Ратушняк, Д. Д. Дмитриев, Ю. Л. Фатеев // Наукоемкие технологии. 2015. № 3. С. 82–85.
- Create a noiseless navigation receivers capable of measuring the spatial orientation of objects / C. N. Tyapkin, Y. L. Fateev, D. D. Dmitriev, E. N. Garin, B. N. Ratushnyak // Successes of modern electronics. 2014. No. 5. P. 61–65.
- Клименко М. Подавление узкополосных помех в сигналах ГНСС с помощью КИХ-фильтров. Электроника: Наука, технология, бизнес. 2016. № 2. С. 112–119.
- Characteristics of optimal spatial-temporal estimation of signal parameters / C. S. Efimenko, V. N. Kharisov // Radiotekhnika. 2009. No. 7. P. 28–32.
