Повышение энергетических показателей работы асинхронных электроприводов с центробежными агрегатами

Автор: Воякин С.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Энергообеспечение и энерготехнологии
Статья в выпуске: 8, 2012 года.
Бесплатный доступ
В статье рассмотрены вопросы энергосбережения, предлагается один из способов энергетической оптимизации асинхронного электропривода минимизация потерь для регулируемого электропривода в установках с центробежными механизмами.
Энергосбережение, электропривод, электрические преобразователи, центробежные агрегаты
Короткий адрес: https://sciup.org/14082565
IDR: 14082565 | УДК: 621.313.333
Operation power indicator increase of the asynchronous electric drives with the centrifugal units
The energy saving issues are considered; one of the ways for the asynchronous electric drive energy optimization and loss minimization for the controlled electric drive in the installations with centrifugal mechanisms is offered in the article.
Текст научной статьи Повышение энергетических показателей работы асинхронных электроприводов с центробежными агрегатами
Весомая часть электрической энергии в агропромышленном комплексе потребляется электрическими двигателями. Это электропривод насосных, компрессорных, вентиляционных, разных видов транспортных, зерноперерабатывающих и других установок.
Одним из массовых потребителей всей электрической энергии (около 30%) является электропривод центробежных механизмов: насосов, вентиляторов, компрессоров и т.д. – с обязательным регулированием производительности. Простым в реализации является способ регулирования с помощью задвижек, вентилей, клапанов – путем введения их в нагнетающую магистраль, но весьма не экономичным, так как при этом изменение характеристик расход-давление трубопровода (магистрали) достигается за счет возрастания потерь в системе, а не за счет уменьшения мощности центробежного механизма. Наиболее перспективным регулированием производительности является электрический способ, т.е. изменение скорости вращения асинхронного двигателя в энергосберегающем режиме. При таком переходе экономический эффект появляется за счет улучшения эксплуатационных характеристик технологического оборудования и обеспечивает снижение в среднем на 20–30% расхода электроэнергии, потребляемой электроприводами.
Технически это реализуется включением между сетью и двигателем управляемого электрического преобразователя, воздействующего на скорость вращения двигателя, благодаря чему исключается необходимость использования других энергетических регулирующих средств.
Р мех = M • * (1)
В качестве электрических преобразователей применяют тиристорные регуляторы напряжения (ТРН) и преобразователи частоты (ПЧ).
Постоянство частоты тока статора предполагает регулирование только напряжения статора АД с помощью ТРН. Это упрощает также поиск условий, обеспечивающих минимизацию потерь. Рассмотрим это на примере АД типа 4А80В2У3 Р н = 2,2 кВт , n 0 = 3000 об / мин .
Рассматривая существующие возможности для решения этой задачи, делаем вывод, что путем регулирования напряжения можно обеспечить минимум потерь мощности, минимум тока статора и активной мощности [1]. В настоящее время предложены различные системы автоматического регулирования, обеспечивающие минимизацию одной из этих величин.
Нами предлагается один из способов энергетической оптимизации асинхронного электропривода – минимизация потерь.
Для обеспечения минимума потерь мощности необходимо поддерживать определенное скольжение.
Скольжение sопт , соответствующее минимуму потерь, находится из выражения dДР
ds
= Mc • ® 1 н
C
• с1 • s + —+ (1 + kcm )• с3 • s + —
к
s
к
= 0
,
где
с = 1+^ 1 +
r
к
( X s
л2 Л
Y к © 7
,
C 2 =
Г 1
\2
У к ^ 7
• R s • R r ,
с 3 = с 3
•
ДР
ст . н
с 4
,
С = с 3
Д Р X © r
♦
M c • ч • (1 + k ст ) • с ; • s ’ +—
3 • E, 2 R © r ’
к
s’
с 4 = с 4
•
А Р ст . н
с
^4
,
C 4 =
M c • % • (1 + к ст ) • C ; • s ’ + —
Д Р
—г • R ©r, 3 • E 2 r
ст , н
н
к
s’
Д Рм , н , Д Р м,н = M н • ч н
• с • s к
Q I ' н + l , sн 7
Д Рн = P H -(1 - П н )/ П н ,
где кст - коэффициент потерь в стали (принимается равным 0,5); А Рн , Д Рст , н , Д Р м , н - полные потери, потери в стали, потери в меди двигателя в номинальном режиме; sн – номинальное скольжение, Ен – ЭДС фазы двигателя в номинальном режиме, Iн , Mн – номинальный ток, момент двигателя; Rr, Rs , Xs , X'r, X A - параметры схемы замещения. Первое и второе слагаемые в скобках (2) определяют мощность потерь в меди двигателя, третье и четвертое – мощность потерь в стали.
Продифференцировав выражение (2), получим уравнение пятого порядка с коэффициентами к 1, k 2, к3, k4, к5 которое решается численным методом при помощи MATLAB , k1 • s5 — к2 • s4 + к3 • s3 — к4 • s2 + к5 = 0,
где к 1 , к 2, к 3 , к 4, к 5 - коэффициенты для выбранного АД; к - показатель степени.
к = ( M с.н — M о ) ;
1,5 • с 4 ) ; (13)
(1 — s^ )2 ’ к1 = 2 • к • (с1 +1,5 • с3);
к 2 = 5 • к • ( с 1 + 1,5 • с 3 ) ;
к 3 = 2 • [ к • ( с , + с 2 + 1,5 • с 3 + 1,5 • с 4 ) + к • ( с , + 1,5 • с 3 )] ;
к4 = 4 • к • (с2 +1,5 • с4) + M0 • (с1 +1,5 • с3) + к • (с1 — с2 +1,5 • с3 — k5 = (k + M 0) • (C2 +1,5 • C4) ,
где M 0 – начальный момент сопротивления механизма, не зависящий от скорости вращения ( M 0 « 0,15 • M fa ) - пятнадцать процентов от номинального момента), Н м; M сн = Р сн / ю сн - момент сопротивления механизма при номинальной скорости вращения.
Анализируя выражение (8), можно сделать следующий вывод: коэффициенты k 1 , k 2 , k 3 малы, а
C 2 » 0 , C 3 « 0 , тогда оптимальное скольжение определится
S опт
1,5 • C 4 • ( k + M 0 )
У M 0 • C 1 + k • ( C 1 + 4,5 • C 4 )
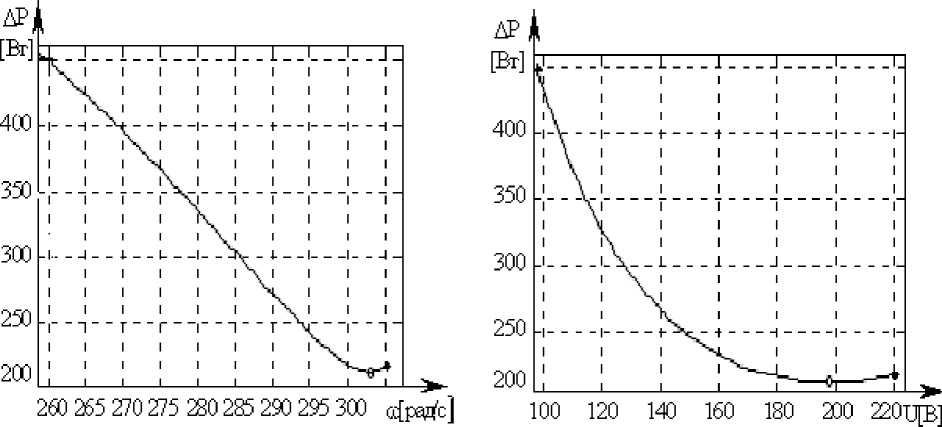
На рисунке 1 (а, б) показаны рассчитанные зависимости потерь от напряжения и угловой скорости вращения асинхронного двигателя типа 4А80В2У3 (2,2 кВт, 3000 об/мин) при вентиляторном моменте на валу.
а б
Рис.1. Зависимости мощности потерь в асинхронном двигателе 4А80В2У3 от угловой частоты вращения (а) и от напряжения (б), где *,о,+ - потери мощности при номинальном, оптимальном и минимальном напряжении АД
Проведенный анализ рисунка 1 позволяет сделать вывод: для обеспечения минимальных потерь в двигателе необходимо при любых нагрузках поддерживать постоянное оптимальное скольжение, определяемое выражением (15). Это свойство асинхронного двигателя позволяет обеспечить минимизацию потерь в системе автоматического регулирования с обратной связью, где за счет стабилизации скорости автоматически изменяется напряжение статора двигателя в функции момента на валу по закону
Y опт
Mопт • ( s 2 + SLt + 2 • a • s K • Sonm )
\ 2 • Mк ■ s K • s onm • (1 + a • s K )
Оптимальная точка относительно минимума потерь для рассматриваемого АД имеет параметры: Д Р опт = 206,7 Вт , U опт = 192 В при Y onm = 0,87 .
Помимо регулирования скорости вращения с помощью ТРН, который можно использовать для относительно небольшого диапазона регулирования, возможно применения частотного способа для более глубокого регулирования. Принцип данного метода заключается в том, что изменяя частоту f1 питающего АД напряжения, можно в соответствии с выражением угловой частоты вращения магнитного поля статора изменять его скорость, получая при этом искусственные характеристики
^ 0 = 2 • п • fJp . (17)
При регулировании частоты возникает также необходимость регулирования амплитуды напряжения источника, что следует из выражения
U 1 « E 1 = k -Ф- f. . (18)
Из приведенного выражения (18) следует, что если при неизменном напряжении источника питания U 1 изменять частоту, то магнитный поток асинхронного двигателя будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастает и это приводит к насыщению стали двигателя и, как следствие, к резкому увеличении тока намагничивания и превышению температуры двигателя; при увеличение частоты f 1 поток будет уменьшаться и, как следствие, будет уменьшаться допустимый момент.
Для наилучшего использования АД и получения высоких энергетических показателей его работы – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по закону, зависящему от вида нагрузки.
Изменение частоты источника питания позволяет регулировать скорость асинхронного двигателя как выше, так и ниже основной. Обычно при регулировании выше основной скорости частота источника питания превышает номинальную не более чем в 1,5–2 раза. Указанное ограничение обусловлено прежде всего прочностью крепления обмотки ротора. Кроме того, с ростом частоты питания заметно увеличиваются величины потерь мощности, связанные с потерями в стали статора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне до 10–15.
Частотное регулирование угловой скорости является экономичным, так как управление двигателем производится при малых скольженьях. Кроме того, при частотном управлении, так же как и при ТРН, достигается минимум потерь в АД или минимум потребляемого двигателем тока или экстремума других энергетических показателей.
Для частотного способа управления на примере асинхронного двигателя 4А80В2У3 ( Рн = 2,2 кВт ) при вентиляторном моменте на валу потери мощности определяются значением абсолютного скольжения в . С другой стороны, сам режим на валу является функцией управляющих воздействий на двигатель (напряжения или тока и частоты). Закон управления двигателем, обеспечивающим минимум потерь при вентиляторном моменте на валу, определяет величину напряжения (тока), при котором значение абсолютного скольжения в соответствует минимуму потерь мощности [2]
d A P в
= M c • Ь 1
• - • в + — + а
{ 1 в
Л
■ ( 1 + акс )| C з • в + -j J
где а = в + Ь;
Ь - относительная скорость при ® min и a max .
Продифференцировав выражение относительно в , получим уравнение четвертого порядка, которое решается численным методом при помощи MATLAB. Зависимости оптимального абсолютного скольжения и относительной частоты от угловой скорости вращения представлены на рисунке 2.
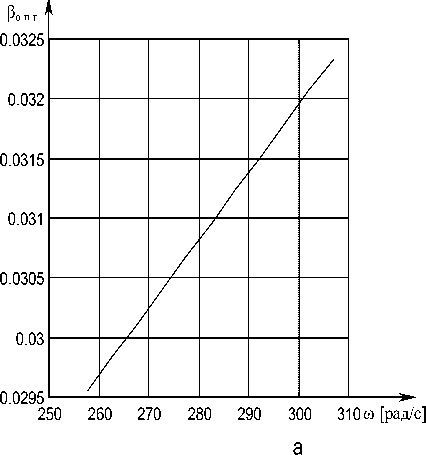
Рис.2. Зависимость оптимального абсолютного скольжения (а) и оптимальной относительной частоты
(б) от угловой скорости вращения
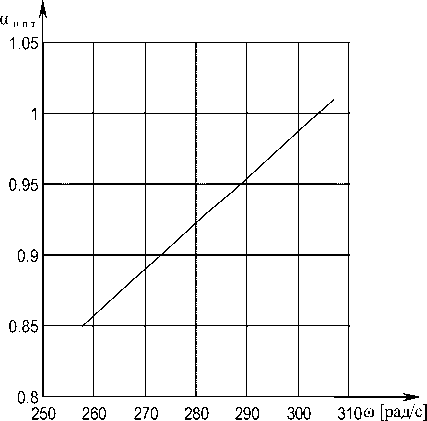
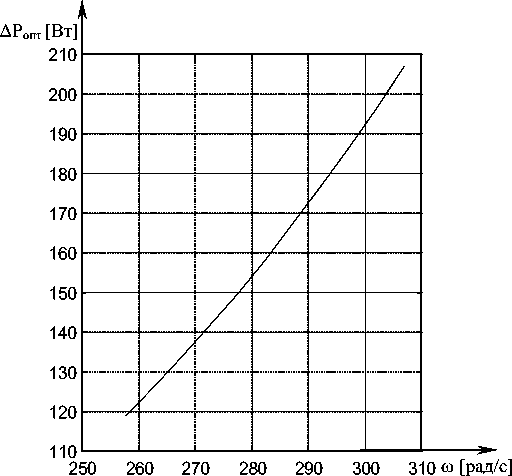
Рис.3. Зависимость оптимальных потерь мощности от угловой скорости вращения A P onm = f( & ) (от © min до © max )
При уменьшении угловой скорости вращения (рис. 2) оптимальная относительная частота α и оптимальное абсолютное скольжение в режиме минимума потерь уменьшается.
Оптимальные потери мощности при оптимальном абсолютном скольжении и оптимальной относительной частоте представлены на рисунке 3, Из которого видно, что потери в двигателе при управлении по минимуму потерь в зависимости от угловой скорости вращения – уменьшаются.
Потери мощности при угловых скоростях © min , © max от абсолютного скольжения и от относительной частоты представлены на рисунке 4.
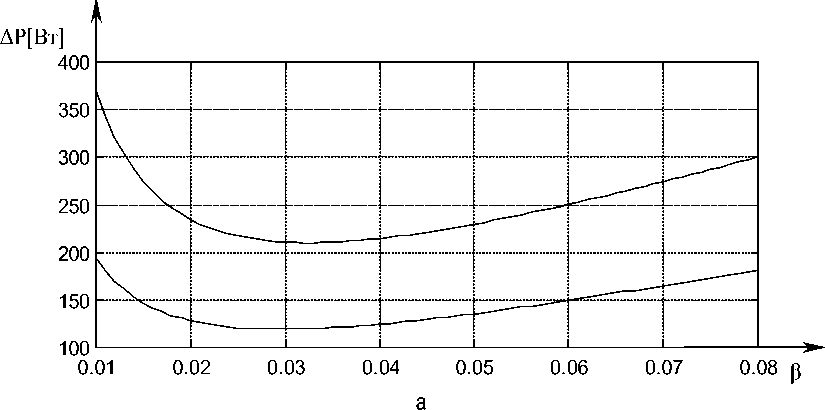
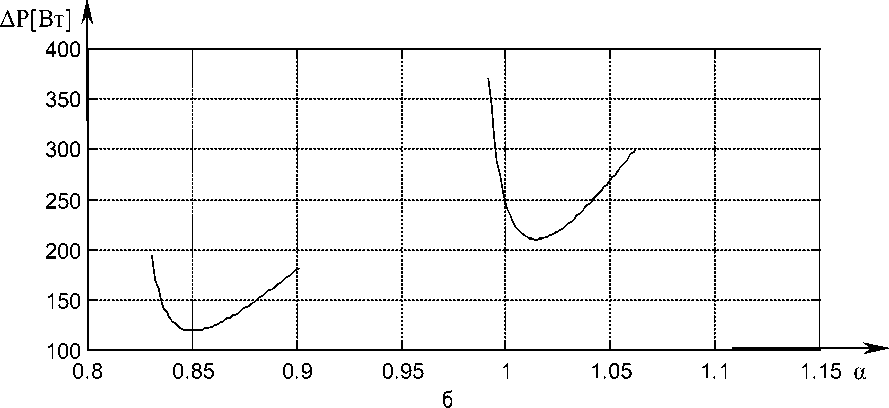
Рис.4. Зависимость абсолютного скольжения (а) и относительной частоты (б) от потерь мощности
Из выражения (19) и рисунка 4 видно, что при каждой угловой скорости из интервала (от ω min до ω max ) существует оптимальное абсолютное скольжение и оптимальная относительная частота.
Проведенные исследования показали, что тиристорное и частотное управление позволяют регулировать скорость вращения и обеспечивать энергосберегающие режимы работы автоматизированного электропривода (АЭП) с центробежными механизмами. Режим энергосбережения позволяет минимизировать потери мощности. Сущность такого управления в установившемся режиме состоит в поддержании некоторого постоянного оптимального скольжения, соответствующего минимуму потерь. Практически это достигается в системах автоматического регулирования с обратной связью по скольжению (или скорости).
При тиристорном управлении оптимальное значение скольжения (15) почти не зависит от C 2 ≈ 0 , C 3 ≈ 0 , определяющих мощность потерь в меди ротора и в стали статора двигателя.
Исследования показали, что частотное управление позволяет оптимизировать потери мощности для АЭП с центробежными агрегатами путем поддержания оптимального абсолютного скольжения, определяемого электрическими параметрами двигателя и относительной частотой. При таком управлении для каждой скорости ЭП существует такое соотношение β и α , которое даст минимум потерь мощности.
Частотное регулирование угловой скорости – плавное, бесступенчатое, с минимальными потерями в асинхронном двигателе по сравнению с тиристорным способом регулирования. Но оно требует применения относительно сложного и дорогостоящего преобразователя частоты.
