Повышение точность работы робота за счет применения нейронных сети (нейронных компенсаторов и нелинейной динамики)
")
Автор: Чжэнцзе Янь, Клочков Ю.С., Лин Си
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 т.24, 2022 года.
Бесплатный доступ
Предметом данной статьи является программируемая система управления роботом-манипулятором. Рассмотрена сложная нелинейная динамика, связанная с практическим применением систем и манипуляторов. Традиционный метод управления заменяется разработанной системой Elma и адаптивной радиальной базовой функцией нейронной сети, что повышает стабильность системы и скорость отклика. С помощью программного обеспечения, связанного с MATLAB, разработаны соответствующие контроллеры и компенсаторы. Представлены результаты обучения нейросетевого контроллера для программирования траекторий робота. Анализируются динамические ошибки различных типов нейросетевых контроллеров и двух методов управления.
Робот-манипулятор, программируемая система управления, нейронная сеть, нелинейные многомерные компенсаторы, моделирование, динамический анализ, динамические ошибки
Короткий адрес: https://sciup.org/148325297
IDR: 148325297 | УДК: 62-529 | DOI: 10.37313/1990-5378-2022-24-4-106-115
Increasing the accuracy of the robot by using neural networks (neural compensators and nonlinear dynamics)
The subject of this article is a programmable control system for a robotic arm. The complex nonlinear dynamics associated with the practical application of systems and manipulators is considered. The traditional control method is replaced by the developed Elma system and the adaptive radial neural network core function, which improves system stability and response speed. With the help of software associated with MATLAB, the corresponding controllers and compensators are developed. The results of training a neural network controller for programming robot trajectories are presented. Dynamic errors of various types of neural network controllers and two control methods are analyzed.
Текст научной статьи Повышение точность работы робота за счет применения нейронных сети (нейронных компенсаторов и нелинейной динамики)
На раннем этапе проектирования управления манипулятором динамическая модель системы и связанные с ней параметры системы должны быть точно описаны при проектировании контроллера [1]. В традиционных методах проектирования управления, таких, как вычислительное управление крутящим моментом и управление обратной динамикой, это работает нормально [2]. Рассчитав крутящий момент манипулятора робота и составив динамическое уравнение, вы можете получить хороший эффект управления [3]. Но данные методы основаны на возможности получить точную модель данных. Однако получить точную математическую модель робота в реальном производстве и использовании сложно [4]. Кроме того, из-за влияния различных полезных нагрузок могут возникнуть трудности с получением соответствующих методов на основе моделей. В последнее время нейросетевые калькуляторы используются для улучшения характеристик систем управления при разработке систем управления роботами-манипуляторами. В системах числового управления (ЧПУ) нейросетевой интерполятор траекторий звеньев робота может использоваться вместо традиционного сплайн-интерполятора [5].
Это исследование используется для обучения компенсаторов с использованием нейронных сетей в системах числового управления роботами-манипуляторами и при отсутствии точных исходных данных [6]. Адаптивный нейросетевой компенсатор используется для замены традиционного ПИД-регулятора и других методов компенсации динамической ошибки, вызванной скручивающей нагрузкой в приводе звена робота [7]. Нелинейная динамическая связь привода выбирает двухпрямой робот-манипулятор в угловой системе координат в качестве моделируемого объекта управления [8].
Целью данной работы является синтез и обучение многомерного нейросетевого контроллера для компенсации и коррекции динамической ошибки траектории робота. И контроллер нейронной сети, и моделирование проекта выполняются в MATLAB [9].
-
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НЕЛИНЕЙНЫХ ДИНАМИЧЕСКИХ КОМПЕНСАТОРОВ
Как правило, многомерные компенсаторы динамических ошибок описываются нелинейными выражениями, соответствующими динамической модели робота, представленной в виде уравнений Лагранжа:
где (q, q', q) - N x 1 векторов обобщенных координат положений, скоростей и ускорений звеньев робота; N – количество ссылок робота.
Основными нагрузками приводов робота являются элементы векторов левой части в уравнении (1), где:
Q_iner = A (q) q ̈ - N × 1 вектор моментов инерции или сил, вызванных ускоренным движением звеньев; A (q) - матрица кинетической энергии N × N механизма робота;
Q_cor = B (q, q ̇ ) q ̇ - вектор N × 1 кориолисовых и центробежных моментов или сил; B (q, q ̇ ) - матрица N × N;
Q_grav = C (q) - N × 1 вектор гравитационных и других потенциальных моментов или сил.
В правой части уравнения (1): Q_d – вектор N × 1 крутящих моментов или сил, создаваемых приводами робота; Q_L – вектор N × 1 дополнительных нагрузок, возникающих в приводах из-за трения в соединениях и действия внешних сил на захват.
Траектории звеньев робота в системах ЧПУ рассчитываются путем решения обратных задач кинематики в базовых точках траектории захвата робота, а затем они интерполируются с использованием полиномов сплайнов. Следовательно, используя программные значения векторов положения, скорости и ускорения звеньев (q_p, (q_p) ̇, (q_p) ̈ ), можно рассчитать программные значения крутящего момента или силовых нагрузок, которые приводы звена должны преодолеть:
; ; ; (2) ;;
Qff =<2mer + Qcor + Qgrav (3)
Выражения (2) и (3) могут быть непосредственно использованы для компенсации динамических ошибок в системах ЧПУ роботов с моментными приводами звеньев и ПИД-регуляторами положений звеньев робота (Игнатова и Ростов, 2014). На рисунке 1 показана соответствующая функциональная схема системы с динамическими компенсаторами, включенными в схему прямой связи (FF) системы управления.
Однако, если есть дополнительные нагрузки Q_L, система с контролем крутящего момента FF может иметь большие динамические ошибки, которые могут быть уменьшены с помощью дополнительного линейного компенсатора:
upid = Kpe + K^ edt — K4q + Kcomq‘p , (4) где K_com = diag {K_ (com, i)} – матрица коэффициентов линейного компенсатора.
Нелинейные компенсаторы могут быть включены в обратную связь (FB) системы управления вместе с ПИД-регулятором или более сложным нелинейным регулятором. В этом случае компенсаторы FB используют сигналы обратной связи реальных положений и скоростей звеньев робота, измеренных соответствующими датчиками:
Qiner = ^^^pid^cor = B(q,q)q ; Qgrav = Clq>. (5) ;
Qfb = ^iner + Qcor + ^arav, (6) где вектор Upid рассматривается как вектор реальных ускорений.
На рисунке 2 показана функциональная схема с нелинейными компенсаторами FB, включенными в замкнутый контур системы.
Многовариантные компенсаторы (5) и (6) выполняют линеаризацию нелинейной динамики робота, описываемой уравнением (1), и тем самым обеспечивают более стабильную работу приводов робота.
-
3. ОБУЧЕНИЕ НЕЛИНЕЙНЫХ НЕЙРОСЕТЕВЫХ КОМПЕНСАТОРОВ
-
3.1. Проектирование компенсаторов с помощью нейронных сетей Элмана
-
Цель исследования заключалась в разработке модели адаптивной нейронной схемы управления нелинейными динамическими системами манипуляционного робота.
В качестве примера рассмотрим промышленный трехзвенный робот-манипулятор, звенья которого соединены между собой приводами вращательного движения. Положение звеньев определяется углами ϕ 1 , ϕ 2 , ϕ 2 . Помимо этого, на звенья робота действуют силы веса, которые направлены под некоторым углом α к выбранной системе координат, что демонстрирует возможность устройства работать под любым углом к горизонту.
Основной характеристикой объекта управления является его передаточная функция, записанная в терминах преобразования Лапласа, которая определяет соотношение выхода объекта y(s) к входу x(s) при нулевых начальных условиях.
Математическая модель, описывающая движение робота, имеет следующий вид:
ф = O)y (Oy = -^7 (Oy + ^ 5, ( 7 )
где Ф – угол отклонения от заданной траектории движения;
tOy – угловая скорость вращения вокруг вертикальной оси;
-
5 – угол поворота вокруг вертикальной оси;
T s – постоянная времени;
K – постоянный коэффициент с размерностью рад/с.
Уравнение, описывающее объект управления, имеет характер интегрируемого звена с опозданием, и описывается дифференциальным уравнением, поскольку в качестве исходной величины рассматривается не угловая скорость, а угол поворота, который является интегралом от угловой скорости:
T^ + d^ = kXi (8)
dt1 dt *■
Передаточная функция звена:
Привод робота имеет характер апериодического звена первого порядка, который можно описать дифференциальным уравнением:
T dx* + X, = kxr(10)
dt ‘
Соответственно передаточная функция звена привода имеет следующий вид:
я (5) =(11)
-
4 " Тгз+1
Для управления движением робота-манипулятора, представляющего собой нелинейную динамическую систему, целесообразно применять нейроконтроллер, который базируется на искусственной нейронной сети Элмана (рис. 1):
аЧЛ) = tansig (IW^p + ЛИ^раЧк — 1) + Ь1) ;
.
Преимуществом нейронной сети Элмана является повышенная устойчивость, поскольку в ней обратные связи заведены из выходов внутренних нейронов на промежуточный слой, что делает ее более устойчивой по сравнению с рекуррентной сетью аналогичного типа (например, нейронная сеть Хопфилда, в которой внутренние обратные связи подводятся к первичным входам, где происходит смешивание сигналов). Кроме того, нейронная сеть Элмана позволяет учитывать предысторию наблюдаемых процессов и накапливать информацию для выбора правильной стратегии управления роботом.
В системе MatLab / Simulink создана модель искусственной нейронной сети для управления манипуляционным роботом, содержащая входной слой из 15 нейронов и скрытый слой в вариантах от 12 до 19 нейронов, которые имеют локальные обратные связи через линии задержки. Выходной слой содержит 1 нейрон с линейной функцией активации (purelin) (см. рис. 2).
Состояние нейронов рекуррентного слоя сети опишем следующими уравнениями: (V (к) = LWVCk -1) + wup + Ь^аЧо) = aj оЧк) = t™sifl(n4k)). (12)
Линейный слой нейронной сети является безынерционным, а состояние его нейронов определяется соотношениями:
I fn2 (к) = LW^a1^) + b2
а2 (к) = purelin(n2 (к)).
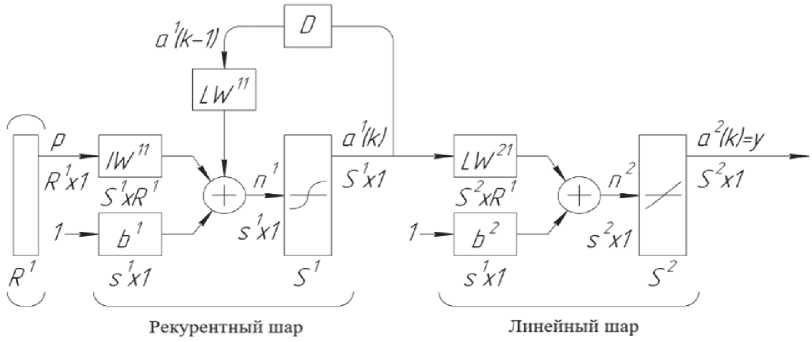
Рис. 1. Структура нейронной сети
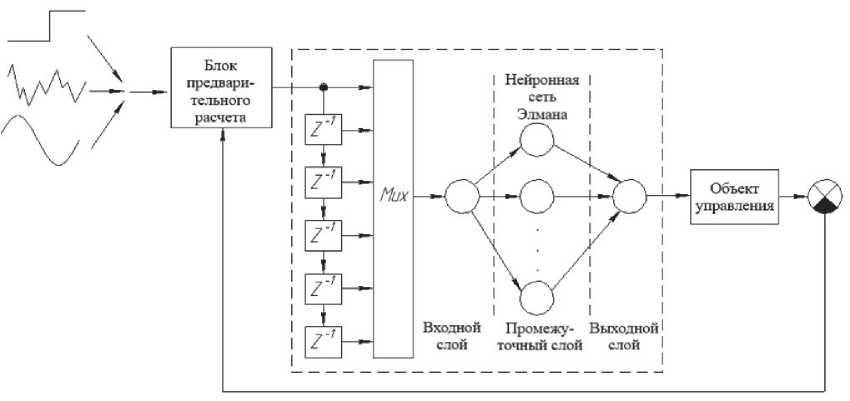
Рис. 2. Структурная модель искусственной нейронной сети управления промышленным трехзвенным манипуляционным роботом
Последовательность значений выходного сигнала, который попадает на линию обратной связи с задержкой, содержащей N-1 блоков опоздания z-1, а выход линии задержки, который состоит из значений входа в момент времени k, k-1, ..., k-N-1, опишем следующим выражением:
Угол поворота манипулятора представим в виде общей переменной , где u1 - настоящий угол поворота первого звена и u2 - настоящий угол поворота второго звена. Поскольку в этом примере , поэтому удовлетворяются равенства z = (z±,z2) = It и где r1 и r2 – желаемые углы поворота манипулятора; z – управляемая траектория манипулятора, v – дополнительная траектория манипулятора, y – вектор состояния манипулятора.
Для описания изменений желаемых углов поворота манипулятора используем следующие законы: r1(t) = sin(t) и r2(t) = cos(t).
Опишем модель нейронной схемы адаптивного управления манипулятором с помощью такого уравнения состояний с переменной структурой:
(—a — |vL если u > v; u = — = —(a + |v|)syn(u — v) = j 0, если и = v;
\ a + |i?|, если u < v.
(16) где – вектор состояний, – посто янный параметр,
( 1, если it > v;
1—1, если и < v.
Для получения решений представленного уравнения численным методом используем соответствующие два разностных уравнения с шагами по времени . Элементы функции в этих уравнениях вычисляют как конечные разности первого порядка (разностные коэффициенты Ньютона). В указанных уравнениях равенство u = r заменяется на неравенство .
Обучение сети (корректировку весовых коэффициентов и смещений нейронов до достижения заданной ошибки) будем проводить с использованием метода сопряженных градиентов (Флетчера-Ривса), которому свойственна хорошая сходимость вычислительного процесса: для положительно определенной квадратичной функции от n переменных минимум достигается не более чем через n шагов.
Алгоритм обучения нейронной сети состоит из следующих шагов:
-
1. В начальный момент времени t=1 все нейроны скрытого слоя устанавливаются в нулевое положение - исходное значение равно нулю.
-
2. Входное значение подается на сеть, где происходит его прямое распространение.
-
3. Согласно выбранному алгоритму Флетчера-Ривса, который по сравнению с алгоритмом градиентного спуска, регулирует скорость сходимости не только за счет настройки параметра скорости, но и корректирует размер шага на каждой итерации, достижение установленного значения ошибки выполним за минимальное количество итераций.
-
4. Установим t=t+1 и осуществим переход на 2 шаг. Обучение нейронной сети выполняется до тех пор, пока суммарная среднеквадратичная погрешность сети не примет наименьшее значение.
-
3.2. Проектирование компенсатора с адаптивной радиальной базовой функцией нейронной сети для аппроксимации локальной модели
В этой части разрабатывается компенсатор нелинейной динамической модели на основе нейронной сети RBF на основе литературы (2) и (3), который сравнивается с компенсатором нейронной сети в предыдущей части.
где — матрица момента инерции порядка n*n, _ ^ '' " — вектор центробежной силы порядка n*n, — вектор силы тяжести порядка n*1, q — вектор, представляющий переменную сустава, а τ — вектор приложенного крутящего момента в суставе.
Динамическое уравнение манипулятора обладает следующими свойствами
Свойство 1. Матрица инерции является симметричной положительно определенной;
Свойство 2. Если ^xCq-q) определяется правилом записи Кристоффеля, матрица ^х(ч) — 2Cx(q,q) кососимметрична.
Поскольку и являются просто функциями q, их можно моделировать с помощью статических нейронных сетей.
m„tJ(q) -Ej »jtj!4jj(v) +^/») = ^/fcjW+ Emk/'?):
Sxk(q)
= Ei
Pki^M^ + £kk + £м№
Среди них — веса нейронной сети; — радиальная базисная функция, входом которой является вектор q, — ошибки моделирования mxkj(q) и соответственно и считаются ограниченными.
Для моделирование с помощью динамической нейронной сети с входными данными q и q. Модель нейронной сети имеет вид cxkjtq.q) = I; akjl^kjlto + siy (z) = «^-^(z) + Eik/z).
Среди них — радиальная базисная функция входного вектора – ошибка моделирования элемента , в предположении, что он также ограничен.
Используя нейросетевое моделирование, динамическое уравнение манипулятора странстве можно записать в виде
Mx(q)x + Cx(q,q)x + G^q) = Fx.
Среди них
™xkj(q) = 9kj^kjto + Edkj(q): cxkj Cq. q) = a^kj (z) + Eckj (z);
9xkW = Pk^M + ^gkW- в
про-
Используя матрицы GL и их операции умно- жения, можно записать с помощью ^(q)=[{9}T-p(q)}] + fM(q).
где и – матрицы GL, элементами которых являются и – ма трица, элементами которой являются ошибки моделирования .
Аналогично, для и существуют
Vw) = [raT №)j]+yz):
где , {B} — матрицы GL и векторы GL, элементами которых являются ; and
-
— элементы, матрицы ошибок моделирования и соответственно.
Предполагая, что 1 — это идеальная траектория рабочего пространства, тогда 2 и 2 — это идеальная скорость и идеальное ускорение.
(25) r(t) = xr(t) — x(t) = e(t) + Ae(t)
где Λ — положительно определенная матрица.
Лемма 1 (лемма Барбала): если функция h:R→R — равномерная непрерывная функция, определенная на [0,+∞), lim_(t→∞) ∫_0^th(δ)d существует и конечна, то lim_(t→∞)h(t)=0.
Лемма 2. Let , где * представляет собой свертку, и H (s)
является строго экспоненциально устойчивой передаточной функцией порядка n*n. Если , то непрерывно при t→∞
Рассмотрим систему SISO второго порядка, пусть , тогда мы можем получить и . Чтобы гарантировать, что H(s) является строго экспоненциально стабильной передаточной функцией, можно определить, что c>0. Если вышеуказанные условия выполнены и , можно получить , ce(t)+e(t)=0, что обеспечивает экспоненциальную замкнутость системы.
Используя i для представления оценочно- го значения, зададим , затем и представляют собой формулы {θ},
{A} и {B } оценки.
Конструктивно контроллер выполнен в виде
F. = [{9}T ■ (S(q)}K + [U}T ■ №)}K + где . Первые три члена регулятора – управление на основе модели, член K_r эквивалентен управлению с пропорциональной производной (PD), а последний член закона управления является надежным членом, который подавляет ошибку моделирования нейронной сети.
Из выражения регулятора очевидно, что регулятору не нужно решать обратную матрицу Якоби. В реальном управлении проигравший может быть получен с помощью .
Подставляя уравнения (23) и (24) в уравнения (21), можно получить
{[WT ■ P(q)}] + ^м(чЖ + <[{Л}Т ■ (Z(z)}] + ec(z№ Ч^ЧНШ + е^^р,.
Подставляя закон управления (26) в приведенную выше формулу, можно получить
{[{9}T ■ {S(q)}l + Ем№+ {[(Д}т - (Z(z)}] +
+5c(z)}x + [{B}T ■ (Я(д)}] + Ec(q) =
[{0}T " {5(q)}]xr + № ■ {7(z)}]zr +
+[{B}T ■ {W(q)}] + Kr + ks sgn(r).
Подставляя x=xr-r и x=xr-r в приведенное выше уравнение, мы можем получить
{[{6/ • {6(q)}l + EM(q)K^r - r) + {[{4}T. {Z(z)}] +
+EC (z)Xxr - r) + [{B}T ■ {//(q)}] + Eg (q) =
= [{9}T • [6(q)}]fr + [ЙГ' {Z(z)}]xr+ [] + Kr + kssgn(r)
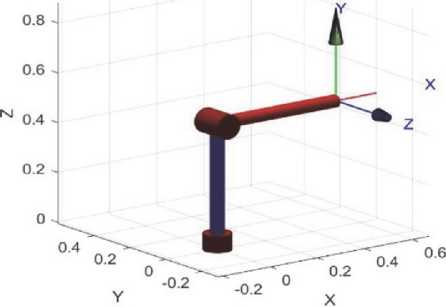
Подставляя уравнения (23) и (24) в приве- денные выше уравнения, мы можем получить МДд)т + Cx = [{9}T ■ (5(q)}]^r+!wT ■ {Z(z)}]ir + [{B}T ■ №)}] + E. Для замкнутой системы, если K>0,k,>//E//па- раллелен, а адаптивный закон устроен как вк = rk ■ {^k(q)}xtrk; (31) Pk = М^к^)тк. Среди них и и – векторы θ ˆ_k и a ˆ_k соответственно, тогда , непрерывно, и e^0 и e '^0 при t^“. В соответствии с интегральной линейной функцией Ляпунова, предложенной в ссылке, ее можно проанализировать на устойчивость следующим образом. V = 1 rTMk(q)r + ^2=1 ^k Гк-^к + Среди них Гк = Гкт>0;Qk = Q^> 0; Nk = Nk > 0 и и — векторы θ ˆ_k и a ˆ_k соответственно, тогда , непрерывно, и e^0 и e '^0 при t^“. В соответствии с интегральной линейной функцией Ляпунова, предложенной в ссылке, ее можно проанализировать на устойчивость следующим образом. V = ; rTMk(,q)r +1^=1 SkT vs, + Среди них Г_к „ Q_k „ N_ka являются положительно определенными парно-секундными матрицами. Производная по V, получаем У =гтМкг + |гтМкг+Е^1 57^^ + Так как матрица кососимметрична, то , можно получить приведенную выше формулу и = гт(м,г+с,г)-^., ^W -SL. "iQi^k-y., Wtfk- Подставляя уравнение (30) в приведенное выше уравнение, мы можем получить 7 = -r^Kr- i,rTsgn(r) + ^=1 (Мт ■ {{k(q)}xerte + Х?=1 ^ ■ Йьй)^^ +К=1Р^Мтк+тЧ-у,^ eiv;^-^ 40^-2^! Рткм^к. Подставим адаптивный закон (31) в формулу (36) и объединим неравенство парал лельно, получим Анализ конвергенции: (1) Из , из леммы , e∈L2 непрерывно, то при , (2) Из 7 < -ттК получаем 0 Следовательно, когда V(t)∈L., существуют , и В этом разделе представлены результаты моделирования, показывающие работу предлагаемого адаптивного нейроконтроллера. В этом разделе предложенная схема управления применяется к двухзвенному проекту, математическая модель которого была разработана в пакете Solidworks и импортирована в пакет MATLAB вторым поколением Simulink [22]. Изначально первое звено перемещается, а второе нет. Показано, что после обучения первого звена отрабатываются внешние возмущения. Затем второе звено начинает двигаться, а первое останавливается. После этого оба звена перемещаются, оказывая динамические возмущения на каждое звено. Его динамическое уравнение КГ„1 = р + Ql + Z/COS^Z) ql + qZcos^Z)]. ; -q2 q2sin(q2) -q2(ql+ q2)sin(q2) q2 qlsin(q2) 0 л _ [flcosql + 5 cos(ql + q2)l , где известное параметров v=12, q1=9, q2=8, g=9.8, внешние помехи системы ,d1=2, d2=3, d3=6 .Пред положим, что ожидаемые инструкции по отслеживанию угла звеньев и угловой скорости являются следующим уравнением qld = 1 + 0.2sin(0.5Trt); q2d = 1 — 0.2cos(0.5Trt). Начальное состояние системы [q1 q2 q3 q4]^T= [0.6 0.3 0.5 0.5]^T , предполагаем , . При моделировании используем формулу закона управления и формулу адаптивного закона: В нейронной сети RNF параметры функции Гаусса установлены на c=[-2 -1 0 1 2] и b=3 , начальный вес 0,1Т Параметры моделирования робота-манипулятора следующие: L(1):’qlim’, [-180 180]*deg;’m’, 0, ...’Jm’, 200e-6, ...’G’, -62.6111, ...’B’, 1.48e-3; L(2) :’qlim’,[-180 180]*deg ;’m’, 17.4, ...’Jm’, 200e-6, ...’G’, 107.815, ...’B’, .817e-3. Рис. 3. Механическая модель робота-манипулятора
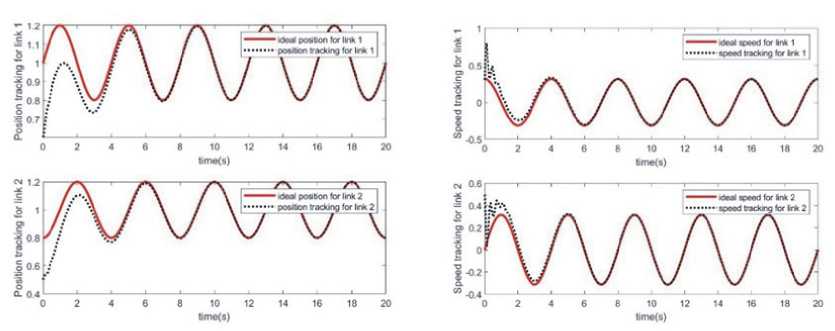
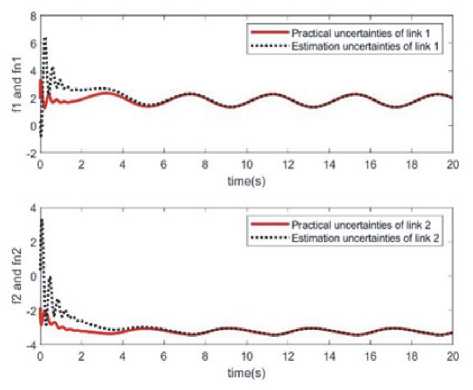
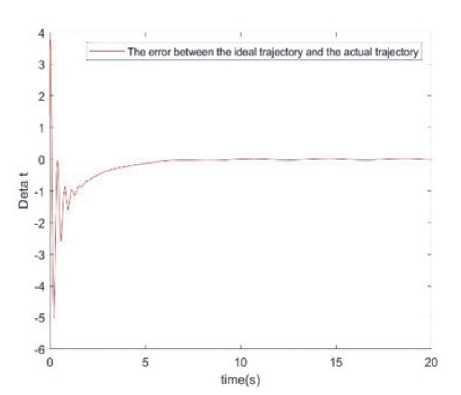
1) имитационное моделирование нейронных сетей ELman Из рис. 4 видно, что в случае адаптивной компенсации на начальном этапе имеет место некоторая степень возмущения, а угловая скорость и положение имеют тенденцию к сближению. Рис. 4. Аппроксимация угловой скорости и положения звена 1 и звена 2 в случае адаптивной компенсации Эльмана Рис. 5. Аппроксимация внешнего возмущения и функции f(x) с адаптивной компенсацией Эльмана Рис. 6. Ошибка между идеальной траекторией и реальной траекторией Из графиков (рис. 5, 6) видно, что возмущения практически полностью скомпенсированы, а процесс управления роботом вполне удовлетворительный. Экспериментальные результаты также доказывают, что предложенный подход достаточно устойчив к динамическим возмущениям, вызванным взаимным влиянием динамики звеньев. Предлагаемый метод управления является оригинальным и успешно использует преимущества SMC, нейросетевого и адаптивного управления.
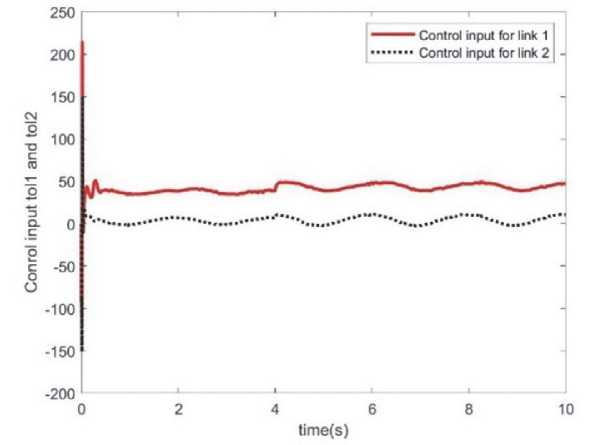
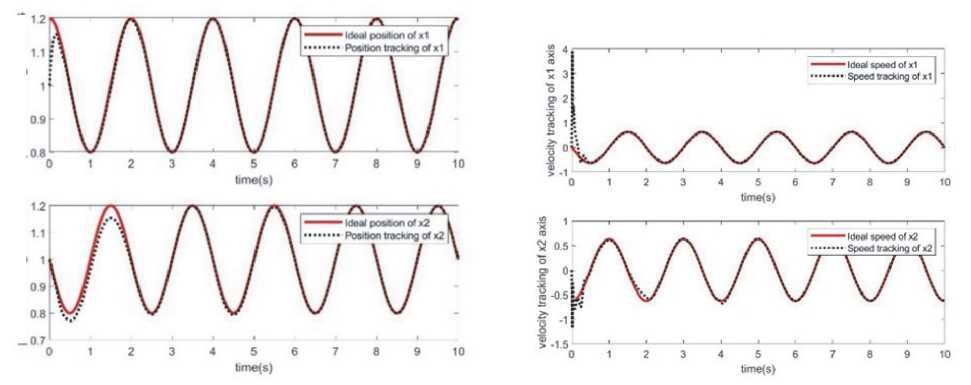
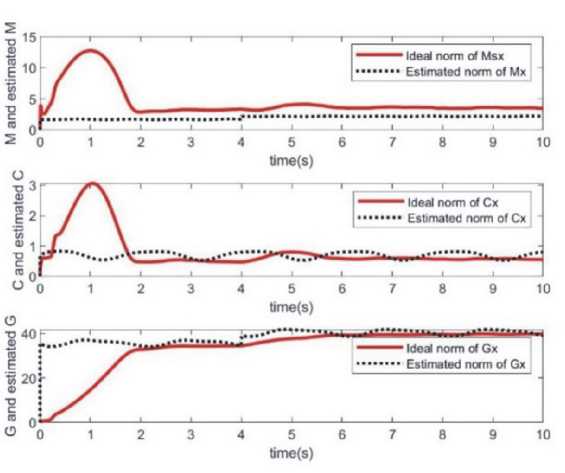
2) Имитационное моделирование нейронных сетей RBF Для аппроксимации каждого элемента Мх№ and GAq") входом нейронной сети RBF является q, рассчитанное количество точек скрытого слоя равно 7. Для аппроксимации каждого элемента Gx(q-q), вход нейронной сети RBF равен (q, q), а количество точек скрытого слоя дизайна равно 7. ПараметрывсехфункцийГауссапринимаются как Ci = [-1.5 -1.0 -0.5 0 0.5 1.0 1.5] и ^i = 10 , а начальное значение нейронной сети установлено равным 0 . Закон управления принимает формулу (26), а адаптивный закон принимает формулу (31). Выгода выби- „ [30 рается как К = [ ^],k_s=0,5. Из леммы 2 желательно, чтобы л [ o 15] . Параметры адаптивного закона (31) принимаются как \\ rk = diag[2.0},gk = diag{0.10] и jVk — diag{5.0) .. Результаты моделирования показаны на рис. 7 и рис. 8. Как видно из рис.8, в начале моделирования значение ошибки относительно велико из-за фазы обучения нейронной сети управляющему входу. Когда нейросетевой компенсатор проходит обучение, ошибки в основном аннулируются, а траектория движения и расчетное значение сходятся. Рис. 7. Вход управления для каналов 1 и каналов 2 Рис. 8. Аппроксимация угловой скорости и положения звена 1 и звена 2 в случае адаптивной компенсации RBF position tracking of x2 axis position tracking of x1 axis Рис. 9. Аппроксимация для переменных H^*(4)H- 11^(9,4)11 и 116,(4)11 Поскольку траектория слежения не является непрерывным возбуждением, оценочные значения 11^(4)11- lte)ll и I|G,O?)II не сходятся к ll^(l)lk IICrMII и HG,(q)l, которые часто встречаются в инженерной практике. Из моделирования двух нейронных сетей видно, что, хотя нейронная сеть RBF имеет более высокую скорость обучения и обучения при том же планировании траектории, общая точность ошибок меньше, чем у Элмана. Но если есть больше условий помех и неопределенной среды, общие результаты обучения RBF лучше. ЗАКЛЮЧЕНИЕ Таким образом, подводя итоги исследования, можно сделать следующие выводы. В ходе исследования качество выполнения роботом конкретных задач зависит не только от качества материала, из которого он изготовлен, качества подвижных частей, но и от качества математических моделей, в которых эффективность и точность управления роботом основаны на анализе его динамической модели и уменьшают погрешность между запланированной и фактической траекториями. В данной статье показана нейронная сеть, отличающаяся тем, что разработана модель двух адаптивной нейронной схемы управления нелинейными динамическими системами манипулятивного робота на основе рекуррентной сети Элмана. Обоснован выбор архитектуры сети и предложен алгоритм ее обучения методом сопряженных градиентов. Моделирование адаптивной нейронной сети RBF показывает, что хотя она имеет более быстрое время отклика, но при отсутствии непрерывного возбуждения система не сходится и значение ошибки намного больше, чем у сети Элмана. Модель вращения плоского манипулятора описывается дифференциальным уравнением первого порядка с переменной структурой и выходным уравнением. Модель имеет простую структуру и может быть использована, когда неизвестны внутренняя динамика и параметры управляемой системы. Компьютерное моделирование применения модели оптимального управления слежением за углом поворота манипулятора подтверждает теоретические положения и демонстрирует высокую эффективность ее функционирования. Этот метод также может быть применен к моделированию манипулятора с несколькими степенями свободы. В то же время модель может быть использована в методе адаптивного управления манипулятором после доработки.
Список литературы Повышение точность работы робота за счет применения нейронных сети (нейронных компенсаторов и нелинейной динамики)
- A.-V. Duka, “Neural Network based Inverse Kinematics Solution for Trajectory Tracking of a Robotic Arm,” Procedia Technology, vol. 12, pp. 20–27, Dec. 2014, doi: 10.1016/j.protcy.2013.12.451.
- Y. H. Kim and F. L. Lewis, “Neural network output feedback control of robot manipulators,” IEEE Transactions on Robotics and Automation, vol. 15, no. 2, pp. 301–309, Apr. 1999, doi: 10.1109/70.760351.
- S. Islam and P. Liu, “Robust Sliding Mode Control for Robot Manipulators,” Industrial Electronics, IEEE Transactions on, vol. 58, pp. 2444–2453, Jul. 2011, doi: 10.1109/TIE.2010.2062472.
- Yazdanpanah M. J. and Karimian Khosrowshahi G., “Robust control of mobile robots using the computed torque plus H∞ compensation method,” 632249139440000000. https://www.sciencegate.app/document/10.1109/cdc.2003.1273069 (accessed Jun. 29, 2022).
- R. E. N, R. N. V, and Y. Zhengjie, “Neural network compensation of dynamic errors in a position control system of a robot manipulator,” Computing, Telecommunication and Control, vol. 64, no. 1, pp. 53–64, 2020, doi: 10.18721/JCSTCS.13105.
- F. W. Lewis, S. Jagannathan, and A. Yesildirak, Neural Network Control Of Robot Manipulators And Non- Linear Systems. CRC Press, 2020.
- K. Kara, T. Missoum, K. Hemsas, and M. Hadjili, “Control of a robotic manipulator using neural network based predictive control,” Dec. 2010, pp. 1104–1107. doi: 10.1109/ICECS.2010.5724709.
- S. Seshagiri and H. Khalil, “Output Feedback Control of Nonlinear Systems Using RBF Neural Networks,” Neural Networks, IEEE Transactions on, vol. 11, pp. 69–79, Feb. 2000, doi: 10.1109/72.822511.
- I. V. Tetko, V. Kůrková, P. Karpov, and F. Theis, Artifi cial Neural Networks and Machine Learning – ICANN 2019: Theoretical Neural Computation: 28th International Conference on Artifi cial Neural Networks, Munich, Germany, September 17–19, 2019, Proceedings, Part I. Springer Nature, 2019.
- M. W. Spong and M. Vidyasagar, Robot dynamics and control. New York: John Wiley & Sons, 1989.
- Y. Zhengjie, E. Rostova, and N. Rostov, “Neural Network Compensation of Dynamic Errors in a Robot Manipulator Programmed Control System,” 2020, pp. 554–563. doi: 10.1007/978-3-030-34983-7_54.
- L. Y.-J, T. S.-C, W. D, L. T.-S, and C. C.l.p, “Adaptive neural output feedback controller design with reduced-order observer for a class of uncertain nonlinear SISO Systems,” UM, vol. 22, no. 8, 2011, doi: 10.1109/TNN.2011.2159865.
- Z. Liu, G. Lai, Y. Zhang, X. Chen, and C. Chen, “Adaptive Neural Control for a Class of Nonlinear Time-Varying Delay Systems With Unknown Hysteresis,” IEEE transactions on neural networks and learning systems, vol. 25, pp. 2129–40, Dec. 2014, doi: 10.1109/TNNLS.2014.2305717.
- N. Duan and H.-F. Min, “NN-based output tracking for more general stochastic nonlinear systems with unknown control coeffi cients,” Int. J. Autom. Comput., vol. 14, no. 3, pp. 350–359, Jun. 2017, doi: 10.1007/s11633-015-0936-4.
- B. Luo, D. Liu, X. Yang, and H. Ma, “H ∞ Control Synthesis for Linear Parabolic PDE Systems with Model-Free Policy Iteration,” in Advances in Neural Networks – ISNN 2015, Cham, 2015, pp. 81–90. doi: 10.1007/978-3-319-25393-0_10.
- C. Chen, Z. Liu, K. Xie, Y. Zhang, and C. L. Philip Chen, “Adaptive neural control of MIMO stochastic systems with unknown high-frequency gains,” Inf. Sci., vol. 418, no. C, pp. 513–530, Dec. 2017, doi: 10.1016/j.ins.2017.08.027.
- Y. Chen, J. Liu, H. Wang, Z. Pan, and S. Han, “Modelfree based adaptive RBF neural network control for a rehabilitation exoskeleton,” Jun. 2019, pp. 4208–4213. doi: 10.1109/CCDC.2019.8833204.
- M. Wang and A. Yang, “Dynamic Learning From Adaptive Neural Control of Robot Manipulators With Prescribed Performance,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 8, pp. 2244–2255, 2017, doi: 10.1109/TSMC.2016.2645942.
- M.-D. Tran and H.-J. Kang, “Nonsingular Terminal Sliding Mode Control of Uncertain Second-Order Nonlinear Systems,” Mathematical Problems in Engineering, vol. 2015, p. e181737, Oct. 2015, doi: 10.1155/2015/181737.
- R. Ortega and M. W. Spong, “Adaptive motion control of rigid robots: a tutorial,” in Proceedings of the 27th IEEE Conference on Decision and Control, 1988, pp. 1575–1584 vol.2. doi: 10.1109/CDC.1988.194594.
- S. S. Ge, C. C. Hang, and L. C. Woon, “Adaptive neural network control of robot manipulators in task space,” IEEE Transactions on Industrial Electronics, vol. 44, no. 6, pp. 746–752, 1997, doi: 10.1109/41.649934.
- “Design and implementation of a RoBO-2L MATLAB toolbox for a motion control of a robotic manipulator.” https://ieeexplore.ieee.org/document/7473678/ (accessed Jun. 30, 2022).
- S. Kh. Zabihifar, A. Kh. D. Markazi, and A. S. Yushchenko, “Two link manipulator control using fuzzy sliding mode approach,” Herald of the Bauman Moscow State Technical University. Series Instrument Engineering, Dec. 2015, doi: 10.18698/0236-3933-2015-6-30-45.
