Повышение точности измерений уровня жидкости в замкнутых движущихся резервуарах

Автор: Сольницев Р.И., Майоров Н.Н.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 4 т.17, 2007 года.
Бесплатный доступ
В статье рассматривается замкнутая система измерения уровня жидкости в движущихся резервуарах. Приведено построение математической модели движения жидкости и программное средство для ее построения.
Короткий адрес: https://sciup.org/14264514
IDR: 14264514 | УДК: 681.518.52
Improvement of accuracy in measuring water levels in closed moving reservoirs
The paper considers a closed system for measuring levels of liquid in moving reservoirs. The procedure of creating a mathematical model for the liquid motion, as well as the respective software, is presented.
Текст научной статьи Повышение точности измерений уровня жидкости в замкнутых движущихся резервуарах
ВВЕДЕНИЕ. ОБЗОР СУЩЕСТВУЮЩИХ МЕТОДОВ
Проблема точного определения уровня жидкости в резервуарах достаточно актуальна на сегодняшний день. Особую значимость она принимает при транспортировке дефицитных материалов и использовании жидкого топлива, т. к. даже небольшая погрешность в измерениях приводит к потере имеющихся ресурсов. Так, предприятия транспортной отрасли используют все известные способы экономии топлива, однако требуются новые, более прогрессивные системы измерения и их разработки для дальнейшего развития отрасли и ее направлений.
Рассмотрим технические средства, существующие на текущий момент для определения уровня жидкости в резервуарах. На основе различных физических методов существует достаточно широкая группа устройств контроля и измерений. В настоящее время распространение получили поплавковые, буйковые, гидростатические, электрические, ультразвуковые, радиоизотопные, а также визуальные средства контроля.
При их разработке учитываются такие физические и химические свойства контролируемой среды, как температура, давление, нагревание, охлаждение, электрическая проводимость и другие. Особое внимание необходимо уделять характеру движения жидкости и резервуара. По характеру движения измерение можно разделить:
Табл. 1. Средства измерения уровня жидкости в резервуаре
|
Вид средств измерения |
Техническая реализация |
|
Визуальные |
|
|
Поплавковые |
|
|
Гидростатические |
|
|
Электрические |
По виду чувствительного элемента разделяют:
|
|
Электр омагнитные |
Датчики направленного электромагнитного излучения |
|
Акустические |
Датчики, работающие по принципу локации: ультразвуковые, определяющие время прохождения сигнала |
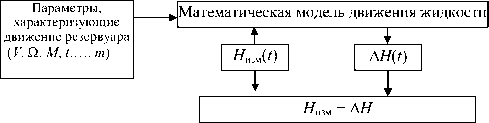
Рис. 1. Схема включения в процедуру измерений математической модели.
H изм ( t ) — измеренный уровень жидкости с помощью штатных приборов; Δ H ( t ) — поправка уровня жидкости; H изм + Δ H — реальные значения уровня жидкости c определенной ошибкой; ( V , Ω , M , t ,…, m ) — значения линейных и угловых скоростей движения объекта, массы резервуара и времени движения и др. параметры движения резервуара c жидкостью
-
1) на статическое (жидкость и резервуар в покое);
-
2) динамическое (резервуар находится в движении);
-
3) смешанное (включает первые два).
Наибольшей интерес для исследования представляют 2) и 3) случаи (жидкость "плещется" в резервуаре), т. к. в их рассмотрении возникают трудности и при моделировании движения, и при выборе средств и методики определения уровня жидкости. Существующие средства измерения представлены в табл. 1. Степень распространения этих средств можно оценить в процентном соотношении так: 24 % — поплавковые датчики, 20 — гидростатические, 15 — емкостные, 5 — кондуктометрические, 21 — электромагнитные средства, 15 % — акустические средства.
Как видно из табл. 1, существует большое количество приборов и методов измерения жидкости.
РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ, ВКЛЮЧАЕМОЙ В КОНТУР ИЗМЕРЕНИЙ
В развитие и усовершенствование существующих средств предлагается система измерения уровня жидкости c включением математической модели в контур измерения. Основной принцип построения этой системы для одномерного случая представлен на рис. 1.
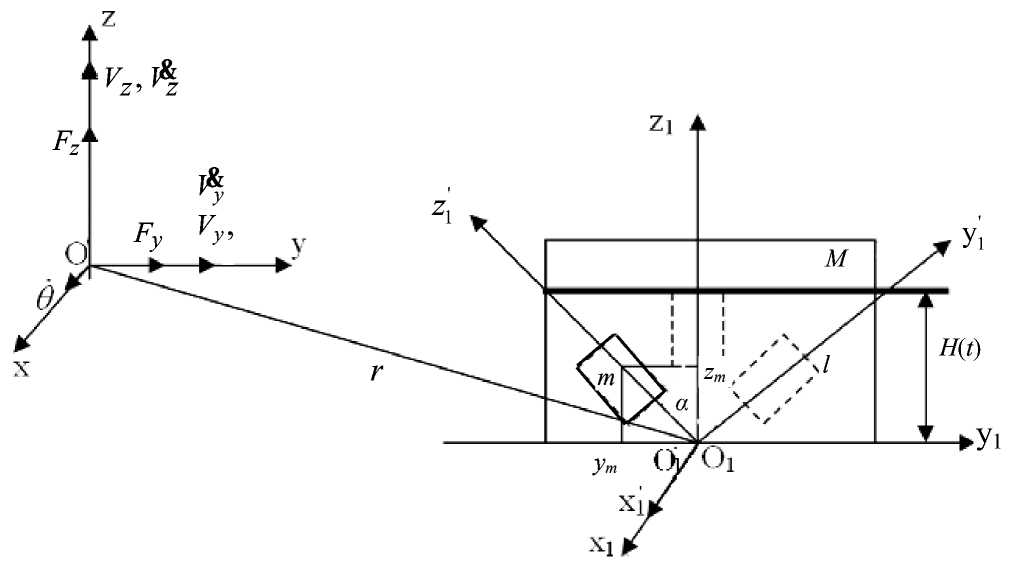
Рис. 2. Рассчитываемая модель жидкости в емкости — твердотельный маятник.
Oxyz — система координат, связанная с основанием (подвижным объектом); Ox 1 y 1 z 1 — система координат жидкостной емкости массой M ; Ox1 ' y1 ' z1 ' — система координат зеркального отражения качающегося на подвесе длиной l маятника массой m ; H ( t ) — высота над поверхностью концевой точки качающегося маятника
В режиме реального времени производится измерение уровня жидкости с помощью штатных приборов и корректировка на основе "Математической модели движения жидкости". На вход модели поступают значения линейных и угловых скоростей движения объекта ( V , Q ), массы резервуара и жидкости в нем ( M , m ), характеристики подвижного объекта и т. д.. Далее организуется итерационный процесс вычисления поправки \ К к H изм в зависимости от параметров движения основания.
Рассмотрим построение математической модели, используемой в такой системе измерения уровня жидкости. Построим простейшую модель для случая плоского (в вертикальной плоскости) движения объекта (основания) с жидкостным резервуаром при следующих допущениях. Точка приложения к объекту сил, определяющих движение, находится вне резервуара: на рис. 2 — (·) О, система координат Oxyz, действующие силы F y , F z (проекции на оси y, z), компоненты скорости и ускорения — V y , V z , V & y , V & z (движение в плоскости yz), θ — угол тангажа. Жидкость в резервуаре представляется твердым телом с переменной массой m ( t ); растекание жидкости по внутренним стенкам резервуара не учитывается; движение жидкости отображается зеркально относительно горизонтальной плоскости физическим маятником (рис. 2); масса маятника сосредоточена в центре масс, а точка подвеса прикреплена к середине днища резервуара на расстоянии r от (·) О основания; в этом случае угол отклонения нормали к поверхности жидкости при движении будет соответствовать углу α отклонения этого маятника от исходного положения (рис. 2.)
Введем систему координат O 1 x 1 y 1 z 1 , начало которой совпадает с точкой крепления маятника к основанию. Система координат O ' x1 ' y1 ' z1 ' связана с зеркальным отображением твердотельного висящего маятником (см. рис. 2); α — угол отклонения маятника; l — длина маятника; m и M — масса жидкости и резервуара соответственно.
Для построения уравнений движения жидкости в резервуаре воспользуемся формализмом Лагранжа.
Составим выражения, необходимые для формирования уравнения Лагранжа:
У т = l sin а , z m = l cos a , (1) где y m , z m — проекции центра тяжести маятника на соответствующие оси;
M r = m t 2 r 2 , 2)
-
где M r — центробежный момент инерции , r — отстояние системы координат, связанной с резервуаром, от системы Oxyz;
Fz = mV, Fy = mV,(3)
где F z , F y — проекции сил, действующие на маятник со стороны основания, на оси Oz и Oy;
Qa = ymFz — ZmFy • где Qα — обобщенная сила, действующая на маятник.
Составим выражения для кинетической и потенциальной энергий замкнутой системы:
T = 2 m (Vz2 + Vy2) + 2 ml2 (a + p )2,(5)
П = - mgl cos
1 2 a + ^ C ( l cos a )
где С — жесткость стенок резервуара, p — проекция угловой скорости.
Составим выражения для функции Лагранжа:
d a = ml 2 (* p ' •
^- = mgl sin a - Cl 2 sin a , d α
Тогда в соответствии с уравнением Лагранжа и в предположении, что масса и длина маятника не меняются на каком-то промежутке времени t i < t < t i +1 :
dfdL^—dL _ dt ( d aJ d a
_ ml 2 ( &+ p ) - mgl sin a + Cl 2 sin a _
Откуда получим:
ml 2<&- mgl sin a + Cl 2 sin a _
_-ml2p+ mlVz sin a - mlVy cos a + mt^2r2.(9)
Разделив левые и правые части уравнения (9) на ml 2, получим:
gC aet—sin a +_ lm
1 V & y θ &2 r 2
_-jp + -(V sin a —-cos a + —— lz ll2
Откуда:
a s+
V m
l
l J l 11
Табл. 2. Зависимость массы топлива в топливном резервуаре самолета от времени полета
|
Времязависимая величина |
Время t , мин |
||||
|
14 |
15.2 |
30.7 |
65.17 |
92.17 |
|
|
Масса топлива m , т |
24.2 |
24.1 |
21.2 |
1.7 |
0.14 |
m , т
t , мин
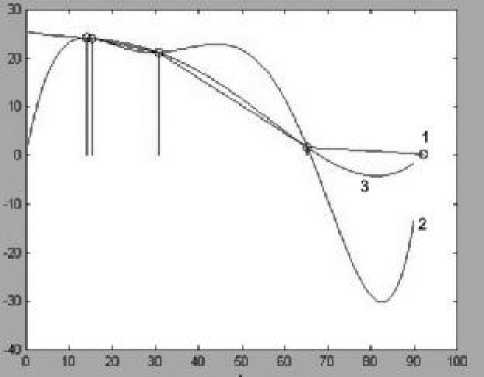
Рис. 3. Графическая зависимость массы топлива в резервуаре от времени полета самолета, и ее полиноминальная аппроксимация:
1 — ломаной;
2 — m ( t ) = –0.0001 t 4 + 0.0103 t 3 – 0.3410 t 2 + 4.828 t ;
3 — m ( t ) = –0.0004 t 3 + 0.0103 t 2 – 0.1658 t + 25.4845
+ C 2 sin
C
m
g l

t + a о ,
Если предположить, что ввиду малости угла α sin a ~ a , то выражение (11) можно представить в виде
& + f \ ( t ) a = Ф ( t ) , (12)
где ϕ ( t ) =
f 1 ( t ) =
f C
^^^^^^^
g
^^^^^^^

l
V m
l
Если f 1 ( t ) > 0, то левая часть выражения (12) представляется характеристическим уравнением, и общее решение такого уравнения — линейная комбинация sin ω t и cos ω t :
a ( t ) = C 1 cos

g l

l
t +
где постоянные коэффициенты C 1 и C 2 могут быть найдены из начальных условий; α 0 — ошибка.
В общем случае решение уравнения (12) сводится к известному уравнению Хилла—Матье [3]. Аналитическое решение таких уравнений затруднительно. Однако по уравнению (12) можно сделать оценку угла отклонения α как функции скоростей и ускорений движения основания. Численное решение такого уравнения выполняется на бортовой вычислительной машине, в результате чего определяется поправка A H ( t ) (рис. 1).
В общем случае необходимо учитывать изменение массы и длины маятника от времени. Опытные данные изменения массы топлива в топливном баке, например, самолета [2], зафиксированные в определенные промежутки времени, приведены в табл. 2. Используя измеренные значения массы топлива в топливном резервуаре, можно построить функцию изменения массы топлива от времени m ( t ). Полиномиальная аппроксимация этой функции приведена на рис. 3.
Таким образом, (если принять аналитическую аппроксимацию 3 (рис. 3)) изменение массы топлива как функция времени в этом частном случае имеет вид
m ( t ) =
= –0.0004 t 3 + 0.0103 t 2 – 0.1658 t + 25.4845. (14)
В любом случае уровень жидкости, измеренный датчиком, можно отождествить с высотой расположения конца физического маятника H ( t ) (рис. 2), причем справедливы выражения:
H ( t ) = l ( t ) cos α , l ( t ) = Ф( m ( t )), (15) где α — угол отклонения маятника, l ( t ) — длина маятника, которая является функцией времени и зависит от изменения массы жидкости. Функцию l ( t ) = Ф( m ( t )) можно предварительно определить по конструкции резервуара.
ЗАКЛЮЧЕНИЕ
Построение математической модели по предложенному способу для пространственной задачи осуществляется также на основе уравнений Лагранжа II рода и реализуется на бортовой вычислительной машине с помощью программно*го пакета "Построение математических моделей"*). Построение модели средствами этой программы базируется на описании кинематической схемы, в которой указаны параметры взаимного расположения рассматриваемого подвижного объекта, резервуара и жидкости в нем.
В заключение следует отметить, что предложенный способ повышения точности измерения уровня жидкости в замкнутом резервуаре может быть реализован на любых подвижных объектах, имеющих замкнутые резервуары с жидкостью, нуждающиеся в измерении уровня. Реализация возможна с помощью бортовых программно-аппаратных средств, разработка которых осуществляется вышеназванной САПР.
