Повышение точности работы метода измерения плотностей и границы раздела между слоями двухслойной жидкости в резервуаре

Автор: Абросимов Евгений Николаевич, Шестаков Александр Леонидович
Статья в выпуске: 2 (219), 2011 года.
Бесплатный доступ
Предлагается алгоритм повышения точности работы метода измерения плотностей и положения границы раздела между слоями двухслойной жидкости, основанный на применении фильтрации Калмана. Приводятся результаты моделирования работы предлагаемого алгоритма.
Измерение плотности, измерение уровня, определение положения границы между слоями, фильтр калмана
Короткий адрес: https://sciup.org/147154724
IDR: 147154724 | УДК: 53.082.22
The accuracy improving of the method of measurement of the densities and the interface between layers of two-layer liquid in the tank
The article proposes an algorithm of accuracy improving of method of measuring densities of two-layer liquid and interface position between layers, based on application of Kalman filtering. Simulation results of the proposed algorithm are given.
Текст научной статьи Повышение точности работы метода измерения плотностей и границы раздела между слоями двухслойной жидкости в резервуаре
Задача измерения плотностей двухслойной жидкости и положения границы раздела между слоями является распространенной в различных практических приложениях.
В работе [1] предложен метод измерения плотностей и границы раздела между слоями двухслойной жидкости в резервуаре, главным достоинством которого является применение всего двух датчиков давления для измерения как плотностей слоев, так и положения границы раздела между слоями. Одним из недостатков предложенного способа является отсутствие фильтрации шумов применяемых датчиков давления.
В процессе измерения в данных с датчиков будет неизбежно присутствовать шум, вызванный различными факторами. Для того чтобы повысить точность измерения, предлагается использовать фильтрацию с помощью рекуррентного алгоритма, основанного на методе фильтра Калмана [2].
1. Начальные условия
Рассмотрим резервуар с двухслойной жидко- стью, которая занимает весь объем резервуара. Примем, что начало координат находится в верхней граничной плоскости резервуара (рис. 1).
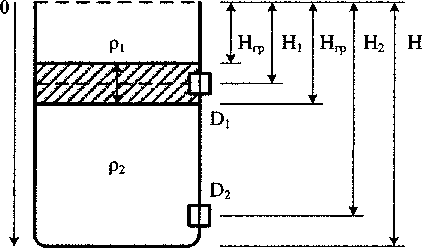
Рис. 1. Резервуар с двумя датчиками давления
На резервуаре закреплены два датчика давления Вг и £)2.Датчик давления В2 расположен у дна резервуара, а датчик Вг находится на уровне некоторого среднего значения, относительно которого колеблется положение границы раздела между слоями.
За счет колебаний границы раздела между слоями датчик DT попеременно оказывается то в верхнем слое и будет измеряться плотность pv то в нижнем слое и будет измеряться плотность р2.
На рис. 1 заштрихованная полоса обозначает интервал, в котором колеблется граница раздела между слоями. Согласно [1] плотности слоев и положение границы раздела будут определяться
следующими зависимостями:
зШг-НгУ v 7
_ Р20Нг-Рг*Ратм zo\
S(P2-Pi) '
анализа погрешностей [1] следует, что наибольшее влияние шум в данных с датчиков
Ар Из
вие этих шумов переменные рг и р2 зависели бы от к строго линейно. К шумам процесса отнесем все факторы, вызывающие отклонения хода изменения величин pi и р2 от линейности. Поскольку характеристики этих шумов могут быть описаны лишь приближенно, примем, что шумы ш1к и to2 k имеют нормальное распределение с нулевыми математическими ожиданиями и среднеквадратичными отклонениями aPt, орг соответственно.
давления будет оказывать на погрешность определения плотностей слоев, в то время как точность определения положения границы раздела будет в большей степени зависеть от разности плотностей. В связи с этим возникает задача восстановления с
< P2,fc = P2,fc — 0 ' p2,fr + 0 ' to2,fr.
максимальной точностью плотностей слоев рг и р2 по данным с датчиков давления DT и D2.
Определим связи между переменными и за
Запишем ее в матричном виде:
о
пишем их в матричном виде:
А = УА ' Pi + А™;
Р2 = 9^2 ~ НО ■ р2 + дНг ■ р! + Р^,
отсюда
Pi -Р^ = уА ■ Pi + о ■ р2;
Р2 -Ра™ = днг • Pi + д(нг - нг) • р2;
Pi - Ам] = \gHi ° 1ГР11
A-A™J № PCA-HJJW'
Введем обозначения: "Pl,fc+1"
А+1 —
Эта матричная запись справедлива в условиях
отсутствия шумов.
времени к+1; г2
2. Стохастические уравнения, описывающие
Л =
- вектор состояния в момент
ход технологического процесса
Для использования фильтра Каймана необходимо описать технологический процесс в виде стохастических дифференциальных или разностных уравнений, которые дают представление о нормальном ходе процесса. Отклонение от нормального хода процесса принимается случайным и
1 0
-0
-1 0
0 0
0 ■
-1
0 -
матрица эволюции
Хк в отсутствие шумов;
Хк =
времени к;
Ргл-1.
- вектор состояния в момент
считается шумом процесса.
Будем считать, что типичное поведение параметров pt и р2 - медленное изменение, приближенно линейное во времени. Так как измерения
Wk =
«1Л 0 w2,k . о .
- вектор шума процесса.
производятся один раз в единицу дискретного времени к, наши уравнения естественно записать
В результате система (7) в матричном виде запишется следующим образом:
как разностные (дискретные), используя подход,
Xk+1=A-Xk + Wk.
предложенный в работе [3] для определения плот
ности и уровня однослойной жидкости:
Р1Л ~ Р1,к-1 — Ар1 _ „
„ _ п _ Р1Л+1 — zPl,k
Р1Л+1 Р1Л ~ аР1
-Р1Л-1 + Ш1А (Р2,/с ~ Р2Л-1 = ^Р2 1рг,к+1 — Ргл = АРг ~P2,k-l + Ы2,Л.
^ Р2Л+1 — 2р2 к
3. Уравнения, описывающие процесс измерения
Уравнение (9) - это уравнение процесса. Добавим к нему уравнение измерения, полученное из выражения (4) с использованием введенного вектора Хк и с учетом шумов измерения:
Здесь индекс к нумерует дискретные моменты
времени; ш1к и to2ik — шумы процесса. В отсутст-
+о • Ргл + о • p2,k-i;
(Ю)
Ак - Ам] _ рАО 0 01
Лл-^J b^oyC^-HJoJ Ak + tVvk3
Введем следующие обозначения:
[ р р 1
г1,к гатм
„ □ - вектор результатов изме-
*2,к *атм!
где Ор10 и Ор20- априорные значения дисперсий плотностей в начальный момент времени.
С ростом числа итераций к матрица ковариации вектора состояния Рк быстро стабилизируется и
рения;
днг о о
_днго д(Н2-Нг)
- матрица наблю
дения;
rVik]
Vk = [v2 kJ ” вектоР шУма измерения.
В итоге система (10) в матричном виде запишется следующим образом:
Yk = C-Xk + Vk. (12)
В результате получим динамическую стохастическую систему:
№+1 = А " Хк + Wk;
I Yk = C-Xk + Vk.
перестает зависеть от своего начального значения.
Задав начальные значения, можно осуществить прогнозирование ожидаемых значений матриц фильтра Калмана. Прогнозируем вектор состояния Хк по Хк-1 и ковариационную матрицу Рк по Pk-v
Хк+1=А-Хк, (19)
Pk+i=A-Pk-AT + Q, (20)
где О - ковариационная матрица шума процесса,
которая характеризует влияние шумов друг на друга, то есть характеризует отклонение процесса от линейности. Эта матрица определяется следующим образом:
Q = M\WkWkT\ =
4. Синтез фильтра Калмана
На первом этапе синтеза фильтра зададим на
чальные значения параметров вектора состояния
Хо и матрицы ковариации Ро.
Хо —
Р1,0 Р1,0 Рг.о
Р2,О
- оценка вектора состояния в начальный момент
времени.
Этот вектор состоит из величин р10 и р20, вычисленных согласно формулам (1) и (2) по данным датчиков давления в начальный (нулевой)
момент времени, то есть
„ ^>1,0-*^*атм.
Р1,о = ——; (15)
_ Р2,0“^1,0
Р2-° ~ д(н2-НгУ <
Примем, что в начальный момент времени в резервуаре находились оба слоя жидкости, граница раздела хотя бы 1 раз перешла через верхний датчик давления.
Определимся с начальными значениями элементов ковариационной матрицы ошибок оценивания вектора состояния в начальный момент времени. В общем виде ковариационная матрица Ро определяется выражением [2]:
Р0=М [(Хо - А)(А - Х0)Г], (17)
где Хо - истинное значение вектора состояния в начальный момент времени. Элементами вектора Ха — Хо будут являться среднеквадратические отклонения погрешностей определения плотностей слоев в начальный момент времени. Тогда ковариационная матрица Ро запишется в виде
41л
. 0
0 о
о
0 0 °Р2,к о
О' о о о
где <Тр1#с и Ор2к - дисперсии погрешностей определения плотности слоев. Так как шумы процесса
wljfc и со2,кнезависимы, все недиагональные элементы матрицы Q равны нулю.
Следующим этапом синтеза фильтра является корректировка прогнозируемых значений. Для этого необходимо вычислить оптимальную матрицу усиления фильтра (коэффициент Калмана)[2]:
Uk=Pk-CT АС-Рк-Ст A-RY\ (22) где R - ковариационная матрица шума измерения, которая характеризует влияние погрешностей датчиков давления друг на друга, г тз 0 1
R = M[I4V] = М 2, (23)
L и O2J где о^ и о2 - дисперсии погрешностей датчиков давления.
Обновим оценку для среднего значения вектора состояния по новым результатам измерения Yk:
Xk=Xk + UkAYk-C-Xk] (24)
и оценку для матрицы ковариации:
Рк-Рк-ик-С-Рк. (25)
В процессе работы фильтра с увеличением числа итераций к матрицы Рк и Uk стабилизируются, что говорит о сходимости фильтра Калмана. Установившиеся значения этих матриц будут зависеть от матриц R, Q и А.
-
5. Численное моделирование работы алгоритма и фильтра Калмана
Предложенный алгоритм повышения точности работы метода измерения плотностей слоев и границы раздела между слоями двухслойной жидкости был смоделирован в пакете Matlab 7.7.0 с начальными условиями:
-
- высота резервуара 500 см;
-
- первый датчик погружен на глубину 250 см;
-
- второй датчик погружен на глубину 350 см;
-
- граница раздела находится на глубине 250 см;
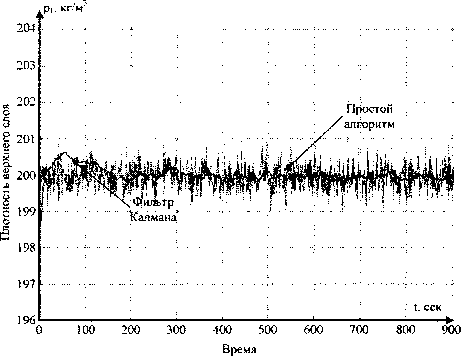
Рис. 2. Плотность pt верхнего слоя
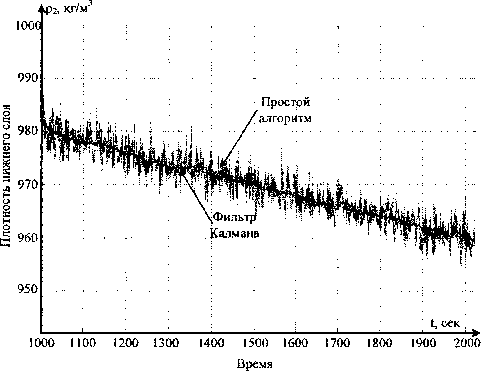
Рис. 3. Плотность р2 нижнего слоя
Время
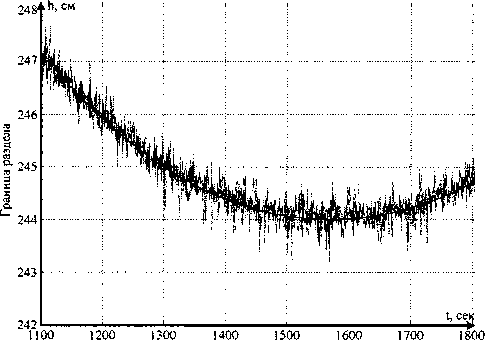
Рис. 4. Положение границы раздела Н,р между слоями
-
- плотность верхнего слоя 200 кг/м3 и остается постоянной;
-
- плотность нижнего слоя 1000 кг/м3 и за время моделирования уменьшается до 900 кг/м3;
-
- время моделирования 5000 с;
-
- предполагалось, что погрешности датчиков представляют собой белый шум с амплитудой 2 % от предельного значения показания датчиков;
-положение границы раздела слоев задавалось выражением
Н^ = 10(sin(0,003t) + 0,4cos(0,004t)), где /- время, с.
На рис. 2-4 представлены графики результатов моделирования, где сплошные линии - это заданные функции изменения параметров.
По результатам моделирования определили, что - СКО плотности pj верхнего слоя ар =1,59 кт/м '; - СКО плотности pj верхнего слоя с использованием фильтра Калмана оР1 = 0,46 кг/м3;
-
- СКО плотности р2 нижнего слоя Ор2= 10,71 кг/м5;
-
- СКО плотности р2 нижнего слоя с исполь
зованием фильтра Калмана о£2 =2,97 кг/м3;
-
- СКО положения границы раздела сн,^ = 6,29 10”3 м;
-
- СКО положения границы раздела, рассчитанное по отфильтрованным плотностям рг и р2, <^ =6,24 103м.
Значения СКО сгР1, oPz и он^ рассчитывались по простому методу, предложенному в [1]. Для всех параметров смещение математического ожидания отсутствует.
Результаты проведенного моделирования показывают, что применение рекуррентного алгоритма, основанного на фильтре Калмана, приводит к существенному повышению точности измерения.
Заключение
Предложен алгоритм повышения точности работы метода измерения плотностей слоев и границы раздела между слоями двухслойной жидкости, основанный на применении фильтрации Калмана. Приведены результаты моделирования предложенного алгоритма, которые подтверждают его работоспособность и более высокую точность по сравнению с расчетами этих параметров прямым методом.
Список литературы Повышение точности работы метода измерения плотностей и границы раздела между слоями двухслойной жидкости в резервуаре
- Абросимов, E.H. Измерение плотностей и границы раздела между слоями двухслойной жидкости в резервуаре/E.H. Абросимов, А.Л. Шестаков//Статья в данном вестнике.
- Браммер, К. Фильтр Калмана-Бьюси. Детерминированное наблюдение и стохастическая фильтрация/К. Браммер, Г. Зиффлинг. -М.: Наука, 1982.
- Применение фильтра Калмана в задаче измерения уровня и плотности жидкости с помощью двух датчиков давления/О.Л. Ибряева, И.Г. Корепанов, A.C. Семенов, А.Л. Шестаков//Информационно-измерительная техника. -2007.
