Повышение точности расчета вращающего момента асинхронного двигателя с учетом поверхностного эффекта в стержнях ротора

Автор: Винокуров Михаил Романович, Моисеенко Андрей Александрович, Масловцева Надежда Юрьевна
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 5 (56) т.11, 2011 года.
Бесплатный доступ
Проведена количественная оценка точности определения механического момента асинхронного двигателя при использовании Т-образной схемы замещения с учетом поверхностного эффекта в стержнях ротора по сравнению с Г-образной схемой замещения.
Механический момент, схема замещения, асинхронный двигатель, скольжение, вихревые токи, ферромагнитная среда
Короткий адрес: https://sciup.org/14249595
IDR: 14249595 | УДК: 621.313.333.2:621.3.016.1
Accuracy increase of calculating induction motor torque based on surface effect in rotor bars
A quantitative assessment of the accuracy for determining the mechanical moment of the induction motor when using T equivalent circuit with skin effect in rotor bars compared with L equivalent circuit has been conducted.
Текст научной статьи Повышение точности расчета вращающего момента асинхронного двигателя с учетом поверхностного эффекта в стержнях ротора
Введение. При расчете вращающего момента асинхронного двигателя (АД), как правило, используется Г-образная схема замещения. Кроме того, отмечается [1], что переход от Т-образной схемы замещения к упрощенной Г-образной приводит к погрешности 3-5% в определении силы тока ротора. Если учесть, что момент АД пропорционален квадрату тока ротора, то погрешность определения момента АД оказывается весьма существенной. Известно также, что на величину вращающего момента оказывают влияние вихревые токи в стержнях ротора и нелинейность магнитных характеристик статора [2].
Постановка задачи и метод исследования. Рассмотрим результаты расчета вращающего момента для Г-образной схемы замещения. Как известно [1], если пренебречь действием тока намагничивания в поперечной ветви (т.е. принять его равным нулю) и не учитывать действие вихревых токов, то схема замещения АД имеет вид, показанный на рис.1, где R1 – активное сопротивление обмотки статора; jX1 – индуктивное сопротивление рассеяния обмотки статора; R′2 – приведенное активное сопротивление обмотки ротора; jX′2 – приведенное индуктивное со-1-s противление рассеяния обмотки ротора; R2′ – приведенное сопротивление, учитывающее
s активную мощность, эквивалентную механическому моменту АД; s – скольжение.
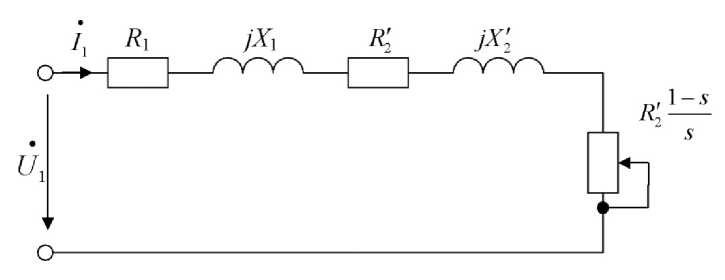
Рис.1. Г-образная схема замещения асинхронного двигателя
Вращающий момент в этом случае определяется известным выражением [1]:
p ml2T R 2
Рмех s mR2
М ГСЗ _ _ _ , , X 2, to to to s ( R \
I R 1 + R^ I + ( X 1 + X 2 )2
V s у где Рмех - механическая мощность АД; to - угловая скорость АД; m — поправочный коэффициент; 12Г - приведенный ток в нагрузке Г-образной схемы замещения; U1 - действующее значение напряжения фазы статорной обмотки.
Расчет вращающего момента по приведенному соотношению (1) дает завышенные результаты по двум причинам. Одна заключается в том, что в этой схеме замещения не учитывается влияние на ток ротора тока намагничивания в поперечной ветви, который создает падение напряжения на сопротивлениях обмотки статора, что приводит к уменьшению мощности на приведенном сопротивлении ротора R ′ 2 . Другая обусловлена тем, что не учитывается влияние вихревых токов в стержнях ротора.
Если рассмотреть вращающий момент, получаемый с использованием Т-образной схемы замещения, т.е. учесть ветвь намагничивания (рис. 2), то для расчета приведенного комплексного значения тока ротора I\ можно получить выражение вида:
/ ‘= U Rj , 2 1 M + jN
где
RL . R'
M _ R 1 R 0 - X 1 X 0 + R 1 R^ - X 1 X 2 + R 0-2 - X 0 X 2 ;
s
s
R' . RL
N _ R 0 X 1 + R 1 X 0 + -2- X 1 + R 1 X 2 + -2 X 0 + R 0 X 2 .
s
s
Выражение для 1 2 в источнике [1] приводится в несколько иной форме. На наш взгляд, целесообразно использовать выражение (2) для удобства сравнения с выражением для момента, определяемого по Г-образной схеме замещения.
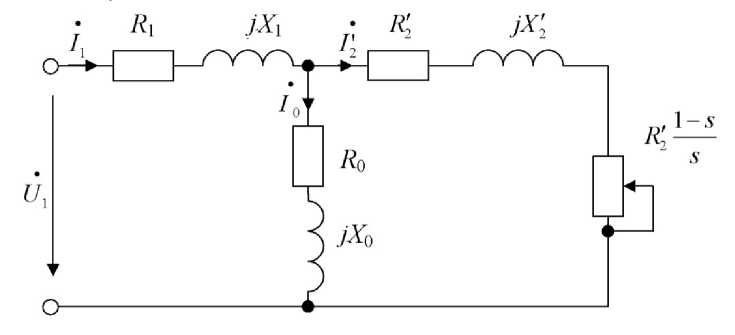
Рис.2. Т-образная схема замещения асинхронного двигателя
С учетом зависимости (2) вращающий момент АД для Т-образной схемы замещения АД можно рассчитать следующим образом:
М ТСЗ =
Р- _ ml 22 R / s _ U m ( R o2 + X 2 )
to
to
П =
to ( M 2 + N 2 )
( R 2 + X 2 ) R 2
R 2 / s = П | m | U 2 / s , V toy
M 2 + N2
,
где П – вещественный коэффициент для данного типа АД, определяемый параметрами эквивалентной схемы замещения и скольжения.
Выражение (3) позволяет выполнять расчет вращающего момента в реальном времени с помощью микроконтроллера, при этом требуется измерять всего 2 рабочих параметра – напряжение питания и частоту вращения двигателя.
Проведем сравнение расчетных данных вращающего момента, полученных по формулам (1) и (3) (т.е. для Г- и Т-образной схем замещения АД) для асинхронного двигателя типа
4А80А2У3 со следующими паспортными данными:
– номинальное напряжение U 1 , В ………………………………………. 3×220/380
– номинальная мощность Р 2ном , кВт …………………………………… 1,5
– номинальное скольжение s ном …………………………………………. 0,042
– критическое скольжение s кр ……………………………………………. 0,37
– номинальная частота напряжения питания f 1ном , Гц ………… 50
– номинальная частота вращения ротора n 2ном , мин-1 ………… 2835
Параметры схемы замещения, Ом: X 1 =3,73, R 1 =7,82, X′ 2 =4,21, R′ 2 =2,91, X 0 =133, R 0 =11,8. Эквивалентные параметры АД приведены в справочнике [3].
Расчетные значения вращающего момента получены для значений скольжения в диапазоне 0,01≤ s ≤ s кр и приведены в табл.1.
Таблица 1
|
Вращающий момент, Н ⋅ м |
s |
s н |
s кр |
||||
|
0,01 |
0,02 |
0,03 |
0,042 |
0,1 |
0,2 |
0,37 |
|
|
М ГСЗ |
1,49 |
2,8 |
3,94 |
5,33 |
8,49 |
9,55 |
7,41 |
|
М ТСЗ |
1,4 |
2,63 |
3,71 |
5,04 |
8,1 |
9,19 |
7,15 |
Относительные значения разностей вращающих моментов (относительная погрешность), вычисленных по Г- и Т-образной схемам замещения, определяются следующим образом:
М - М
δ = ГСЗ ТСЗ ⋅ 100% .
М ГСЗ
Значения δ в зависимости от скольжения s приведены в табл.2. График зависимости δ = f ( s ) приведен на рис.3.
Таблица 2
|
Погрешность |
s |
s н |
s кр |
||||
|
0,01 |
0,02 |
0,03 |
0,042 |
0,1 |
0,2 |
0,37 |
|
|
δ , % |
6,27 |
6,01 |
5,77 |
5,7 |
4,57 |
3,8 |
3,46 |
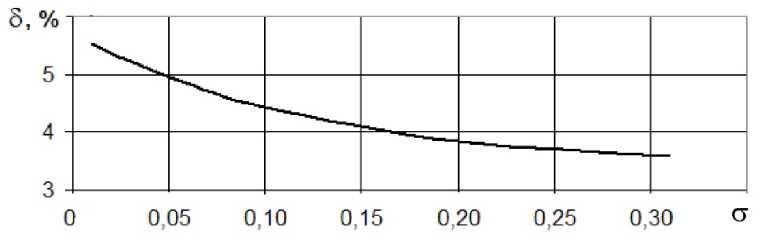
Рис.3. Зависимость δ от скольжения s
Как видно из приведенных расчетных данных, использование Т-образной схемы замеще- ния позволяет существенно увеличить точность расчета вращающего момента.
Однако расчет вращающего момента по выражению (3) основан на том, что значения са- мих параметров схемы замещения считаются постоянными при изменении скольжения.
В установившемся режиме работы в широком диапазоне изменения скольжения рекомендуется учитывать роторные вихревые токи, оказывающие влияние на параметры Т-образной схемы замещения [1].
Для оценки влияния вихревых токов при изменении частоты тока в стержнях ротора (изменение скольжения s ) на параметры схемы замещения ротора рассмотрим зависимости полного, активного и реактивного сопротивлений стержня ротора от скольжения для АД типа 4А80А2У3. Данные зависимости получим исходя из численного расчета электромагнитного поля, создаваемого переменным током в стержне ротора. В исследовании [4] проведен численный расчет электромагнитного поля для различных форм пазов ротора, при этом не учитывается влияние ферромагнитной среды статора, что снижает точность расчета параметров стержней ротора.
Выполним расчет электромагнитного поля с учетом влияния ферромагнитной среды ста- тора, основываясь на следующих условиях:
– решение задачи электромагнитного поля ротора осуществим в предположении, что ферромагнитные среды ротора и статора линейны;
– электропроводностью ферромагнетика ротора и статора пренебрегаем;
– материал стержней ротора – алюминий, γ =37∙106 См/м;
– геометрия и размеры пазов ротора и статора для данного типа двигателя (рис.4);
– действующее значение тока в стержне ротора 10 А;
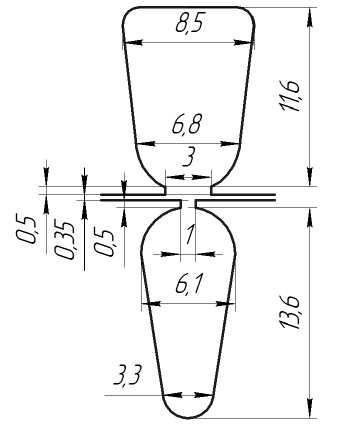
Рис.4. Геометрия и размеры пазов ротора и статора асинхронного двигателя 4А80А2У3
– для расчета электромагнитного поля и параметров стержня ротора используем программу Elcut ;
– расчет выполняем в диапазоне скольжений s x< s <3 s ном , скольжение моделируем через задание соответствующей частоты переменного тока стержня ротора.
С учетом вращения ротора относительно статора, взаимное расположение пазов ротора и статора в различные моменты времени изменяется, при этом можно выделить два крайних случая:
– статор представлен сплошным металлическим телом ( ц >> Ц о , Y- 0 );
– паз статора расположен симметрично над пазом ротора.
Для учета ферромагнитной среды статора необходи- мо выполнить расчет электромагнитного поля и параметров стержня ротора для двух указанных крайних случаев, а затем, используя расчетные данные, вычислить средние значения этих пара- метров.
На рис.5 показаны расчетные силовые линии индукции магнитного поля, создаваемого переменным током в стержне ротора для двух крайних случаев.
В табл.3 приведены результаты расчета параметров алюминиевого стержня с учетом действия поверхностного эффекта на различных частотах тока в стержне ротора для случая, когда статор представлен сплошным металлическим телом (рис.5, а ).
В табл.4 приведены результаты расчета параметров алюминиевого стержня с учетом действия поверхностного эффекта на различных частотах тока в стержне ротора для случая, когда паз статора расположен симметрично над пазом ротора (рис.5, б ).
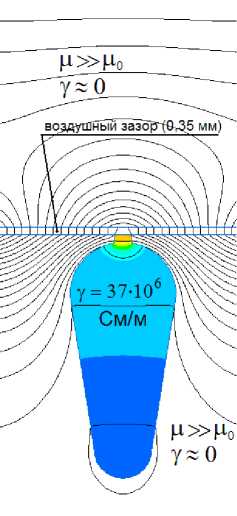
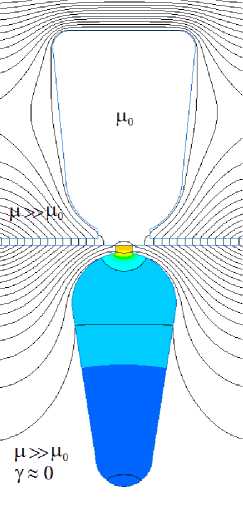
а ) б )
Рис.5. Расчетная картина магнитного поля, создаваемого переменным током в стержне ротора двигателя 4А80А2У3: а – статор представлен сплошным металлическим телом; б – паз статора расположен над пазом ротора
Таблица 3
|
s |
f Гц |
Z, Ом |
R, Ом |
X , Ом |
L , Гн |
|
0,12 |
6 |
6,766E-04 |
4,295E-04 |
5,228E-04 |
1,387E-05 |
|
0,1 |
5 |
6,116E-04 |
4,293E-04 |
4,356E-04 |
1,387E-05 |
|
0,08 |
4 |
5,528E-04 |
4,291E-04 |
3,485E-04 |
1,387E-05 |
|
0,06 |
3 |
5,024E-04 |
4,290E-04 |
2,614E-04 |
1,387E-05 |
|
0,042 |
2,1 |
4,663E-04 |
4,289E-04 |
1,830E-04 |
1,387E-05 |
|
0,03 |
1,5 |
4,483E-04 |
4,289E-04 |
1,307E-04 |
1,387E-05 |
|
0,02 |
1 |
4,376E-04 |
4,289E-04 |
8,713E-05 |
1,387E-05 |
|
0,0032 |
0,16 |
4,291E-04 |
4,288E-04 |
1,394E-05 |
1,387E-05 |
Таблица 4
|
s |
f Гц |
Z, Ом |
R, Ом |
X , Ом |
L , Гн |
|
0,12 |
6 |
6,542E-04 |
4,295E-04 |
4,935E-04 |
1,309E-05 |
|
0,1 |
5 |
5,945E-04 |
4,293E-04 |
4,113E-04 |
1,309E-05 |
|
0,08 |
4 |
5,407E-04 |
4,291E-04 |
3,290E-04 |
1,309E-05 |
|
0,06 |
3 |
4,949E-04 |
4,290E-04 |
2,468E-04 |
1,309E-05 |
|
0,042 |
2,1 |
4,624E-04 |
4,289E-04 |
1,727E-04 |
1,309E-05 |
|
0,03 |
1,5 |
4,463E-04 |
4,289E-04 |
1,234E-04 |
1,309E-05 |
|
0,02 |
1 |
4,367E-04 |
4,289E-04 |
8,225E-05 |
1,309E-05 |
|
0,0032 |
0,16 |
4,290E-04 |
4,288E-04 |
1,316E-05 |
1,309E-05 |
На основе расчетных данных, приведенных в табл.3 и 4 для двух крайних случаев расположения пазов ротора относительно пазов статора, рассчитаны средние значения полного, активного и реактивного сопротивлений стержня на единицу длины для различных значений скольжения. Результаты расчета приведены в табл.5.
Таблица 5
|
s |
f , Гц |
Z , Ом |
R , Ом |
X , Ом |
L , Гн |
|
0,12 |
6 |
6,654E-04 |
4,295E-04 |
5,08E-04 |
1,350E-05 |
|
0,1 |
5 |
6,031E-04 |
4,293E-04 |
4,23E-04 |
1,350E-05 |
|
0,08 |
4 |
5,468E-04 |
4,291E-04 |
3,39E-04 |
1,350E-05 |
|
0,06 |
3 |
4,987E-04 |
4,290E-04 |
2,54E-04 |
1,350E-05 |
|
0,042 |
2,1 |
4,644E-04 |
4,289E-04 |
1,78E-04 |
1,350E-05 |
|
0,03 |
1,5 |
4,473E-04 |
4,289E-04 |
1,27E-04 |
1,350E-05 |
|
0,02 |
1 |
4,372E-04 |
4,289E-04 |
8,47E-05 |
1,350E-05 |
|
0,0032 |
0,16 |
4,291E-04 |
4,288E-04 |
1,36E-05 |
1,350E-05 |
Примем значения сопротивлений стержня ротора при номинальном режиме ( s ном =0,042 для выбранного типа двигателя) за 100% и рассчитаем относительные изменения этих значений сопротивлений в зависимости от скольжения по выражениям:
Z -Z
ε = Zi - Z H ⋅ 100 %,
Z i Z H
R -R
ε = Ri - R H ⋅ 100%,
R i R H
X - X
= i H
X i
⋅ 100% .
X H
Результаты расчета сведены в табл.6.
Таблица 6
|
s |
ε Z , % |
ε R , % |
ε X , % |
|
0,12 |
43,28 |
0,14 |
185,39 |
|
0,1 |
29,87 |
0,09 |
137,64 |
|
0,08 |
17,74 |
0,05 |
90,45 |
|
0,06 |
7,39 |
0,02 |
42,70 |
|
0,042 |
0,00 |
0,00 |
0,00 |
|
0,03 |
-3,68 |
0,00 |
-28,65 |
|
0,02 |
-5,86 |
0,00 |
-52,42 |
|
0,0032 |
-7,60 |
-0,02 |
-92,36 |
Из табл.6 следует, что изменение активного сопротивления ротора под действием вихревых токов незначительно и при s =3 s ном составляет 0,14%. Изменение реактивного сопротивления стержней ротора при увеличении скольжения существенно и объясняется увеличением частоты тока, протекающего в стержнях.
Для учета изменения реактивных сопротивлений стержней ротора при расчете вращающего момента определим значения приведенного сопротивления X′ 2 для эквивалентной схемы замещения при выбранном значении скольжения по формуле:
ε
X X i
2 i = X 2 + X 2 ,
2 i 2 2 100
ε X где X ′ i 2
– приращение приведенного реактивного сопротивления ротора в зависимости от скольжения.
Уточненный расчет вращающего момента выполнен по выражению (3) с учетом изменения реактивных сопротивлений стержней ротора.
Результаты расчета значений вращающего момента сведены в табл.7:
– для Г-образной схемы замещения ( М ГСЗ );
– Т-образной схемы замещения ( М ТСЗ );
– Т-образной схемы замещения с учетом изменения Х ′ 2 ( М ТСЗ,П.Э ).
Таблица 7
|
s |
M ГСЗ , Н∙м |
М ТСЗ , Н∙м |
М ТСЗ,П.Э , Н∙м |
|
0,12 |
10,27 |
9,82 |
8,34 |
|
0,1 |
9,43 |
9,00 |
8,24 |
|
0,08 |
8,34 |
7,94 |
7,64 |
|
0,06 |
6,93 |
6,57 |
6,51 |
|
0,042 |
5,33 |
5,04 |
5,04 |
|
0,03 |
4,06 |
3,82 |
3,83 |
|
0,02 |
2,85 |
2,68 |
2,69 |
|
0,0032 |
0,50 |
0,47 |
0,47 |
По данным табл.7 построены механические характеристики АД для перечисленных выше случаев (рис.6).
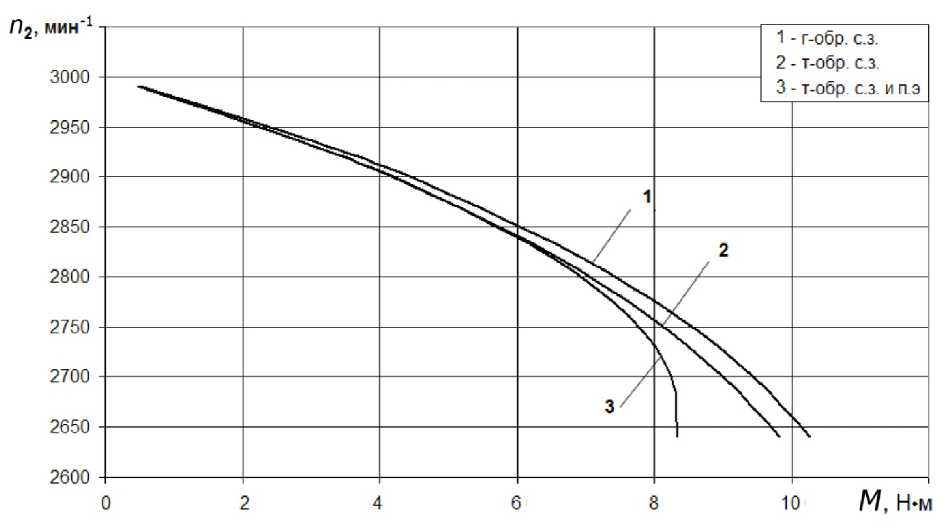
Рис.6. Расчетные механические характеристики двигателя 4А80А2У3
Полученные результаты могут быть использованы при реализации микропроцессорного устройства бесконтактного контроля вращающего момента АД [5] для уточнения косвенного метода измерения момента с использованием Т-образной схемы замещения АД в широком диапазо- не изменения скольжения.
Выводы. 1. Использование Т-образной схемы замещения позволяет повысить точность расчета вращающего момента асинхронного двигателя для номинального режима на 5% по сравнению с расчетом по Г-образной схеме замещения.
-
2. При понижении оборотов асинхронного двигателя ниже номинальных ( s > s ном ) погрешность расчета вращающего момента по Г-образной схеме замещения понижается незначительно (см. рис.3).
-
3. Влияние изменения реактивного сопротивления ротора X′ 2 существенно возрастает при
s >2 s
ном .
-
4. При s <3 s ном влиянием вихревых токов на изменение активных сопротивлений стержней ротора можно пренебречь.
Список литературы Повышение точности расчета вращающего момента асинхронного двигателя с учетом поверхностного эффекта в стержнях ротора
- Копылов И.П. Электрические машины: учеб. для вузов/И.П. Копылов. -М.: Высш. шк.: Логос, 2000. -607 с.
- Иванов-Смоленский А.В. Электрические машины: учеб. для вузов. В 2 т. Т.1. -2-е изд., перераб. и доп./А.В. Иванов-Смоленский. -М.: Изд-во МЭИ, 2004. -656 с.
- Асинхронные двигатели серии 4А: справочник/А.Э. Кравчик [и др.]. -М.: Энергоатомиздат, 1982. -504 с.
- Попов А.П. Исследование поверхностного эффекта в проводниках произвольного сечения с помощью программы Elcut/А.П. Попов, А.О. Чугулёв//Омский науч. вестн. -2009. -№3(83). -С.183-187.
- Попов А.П. Моделирование микропроцессорного устройства контроля вращающего момента асинхронного двигателя с использованием его эквивалентной схемы замещения и импульсного датчика оборотов/А.П. Попов, М.Р. Винокуров, А.А. Моисеенко//Вестн. Донск. гос. техн. ун-та. -2011. -Т.11, №1. -С.77-82.
