Повышение точности внутритрубной навигации в условиях сезонных подвижек грунтов

Автор: Брюзгин Герман Валерьевич, Алешкин Валерий Викторович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-1 т.19, 2017 года.
Бесплатный доступ
Показана актуальность определения потенциально опасных участков трубопровода, подверженных изменению своего положения. Описаны существующие способы решения задачи определения смещений трубопровода. Проанализированы достоинства и недостатки описанных способов. Приведены результаты разработки нового способа определения смещений трубопровода. Способ предложен с учетом существующей технологии эксплуатации нефтепроводов и газопроводов, а также с учетом доступных инерциальных датчиков и других датчиков первичной информации измерительных систем внутритрубного устройства. Показана актуальность оценки изменений углового положения оси трубопровода средствами внутритрубной навигации с целью идентификации потенциально опасных участков, требующих контроля изменения напряженно-деформированного состояния. Описаны погрешности внутритрубного подвижного устройства с одометрической, инерциальной и профилеметрической измерительными системами, а именно: проскальзывание одометра по поверхности трубы, угловое смещение продольной оси внутритрубного подвижного устройства относительно оси трубопровода, баллистическая погрешность системы ориентации. Описаны методы идентификации и компенсации погрешностей измерительных систем внутритрубного устройства для определения смещений трубопровода. В рамках предложенного способа определения смещений трубопровода предложены следующие подходы к борьбе с погрешностями измерительных систем внутритрубного подвижного устройства: для компенсации проскальзывания одометра используют информацию об измерении длин одноименных участков трубопровода, полученную по результатам многократных пропусков внутритрубного устройства по трубопроводу; для компенсации углового смещения внутритрубного устройства используют профилеметрическую систему с двумя поясами измерителей радиального расстояния; для компенсации баллистической погрешности системы ориентации используют оценки скорости и ускорения, полученные по сигналам одометрической системы с учетом времени между сигналами одометра. Приведены примеры идентифицированных по предложенному способу смещенных потенциально опасных участков трубопроводов.
Трубопровод, изменение углового положения, напряженно-деформированное состояние, внутритрубный дефектоскоп, многократное обследование, инерциальный измерительный модуль, одометр, датчик профиля
Короткий адрес: https://sciup.org/148205389
IDR: 148205389 | УДК: 629.067:629.051
Improving the accuracy of in-pipe navigation in conditions of seasonal soil movements
The urgency of identifying potentially dangerous pipeline sections that are subject to a change in their position is shown. The existing methods of solving the problem of determining the pipeline offsets are described. The advantages and disadvantages of the described methods are analyzed. The results of the development of a new method for determining the pipeline displacements are presented. The method is proposed taking into account the existing technology of operation of oil pipelines and gas pipelines, as well as taking into account available inertial sensors and other sensors of primary information of measuring systems of the in-tube device. The relevance of the assessment of changes in the angular position of the pipeline axis by means of in-pipe navigation is shown with the purpose of identifying potentially hazardous areas that require monitoring of the change in the stress-strain state. Errors of the inside-tube mobile device with odometric, inertial and profile-metric measuring systems are described, namely: slippage of an odometer over the surface of the pipe, angular displacement of the longitudinal axis of the in-tube mobile device relative to the axis of the pipeline, ballistic error of the orientation system. Methods for identifying and compensating for errors in the measuring systems of the in-tube device for determining pipeline offsets are described. Within the framework of the proposed method for determining the pipeline displacements, the following approaches to countering the errors in the measuring systems of the in-tube mobile device are proposed: to compensate for the slippage of the odometer, information is used to measure the lengths of the same pipeline sections, obtained from the multiple passes of the in-tube device through the pipeline; To compensate for the angular displacement of the in-tube device, use a profilometric system with two belts of radial distance meters; to compensate for the ballistic error of the orientation system, speed and acceleration estimates obtained from the odometer system signals are used, taking into account the time between the odometer signals. The examples of the biased potentially dangerous sections of pipelines identified by the proposed method are given.
Текст научной статьи Повышение точности внутритрубной навигации в условиях сезонных подвижек грунтов
Протяженность трубопроводной сети для транспортировки нефти и газа в России превышает 250 тыс. км. Развитая трубопроводная сеть требует регулярного контроля технического состояния. Для идентификации разнообразных дефектов разработаны и применяются многочисленные способы неразрушающего контроля магистральных трубопроводов (МТ), а технология эксплуатации трубопроводов постоянно совершенствуется, повышая требования к безопасности.
В статье приведены результаты разработки и апробации способа определения смещений трубопровода. Целью статьи является актуализация измерения углового положения оси тру-
бопровода внутритрубными средствами с целью идентификации потенциально опасных участков (рис.1), требующих контроля изменения напряженно-деформированного состояния (НДС).
Методика исследования включает в себя математическое моделирование, полунатурное моделирование и проверку результатов моделирования при помощи натурных испытаний.
РЕЗУЛЬТАТЫ РАЗРАБОТКИ
Изменение положения МТ приводит к преждевременному выходу МТ из строя по двум причинам. Во-первых, превышение предельно допустимого НДС непосредственно приводит к аварийному разрушению МТ (рис. 3). Во-вторых, работа участков трубопровода при высоком уровне механического напряжения приводит к интенсивному развитию коррозионного растрескивания под напряжением (рис. 2) и, как следствие, преждевременному выходу трубопровода из строя. Так же стоит отметить,

Рис. 3. а) Авария на МГ «Челябинск-Петровск» как результат воздействия изгибных напряжений; б) положение надземного перехода после резки с целью снятия изгибных напряжений
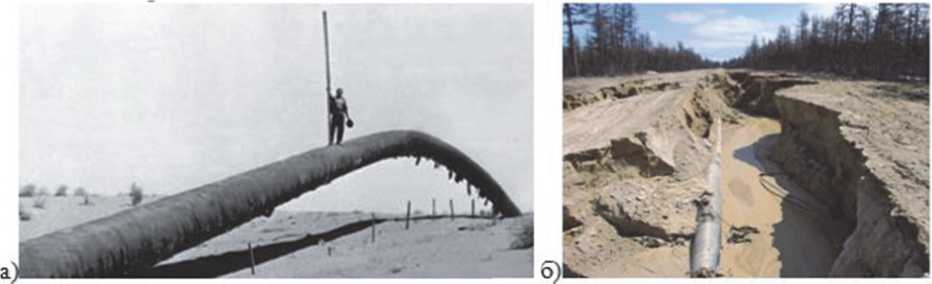
Рис. 1. Примеры изменения проектного положения трубопровода

Рис. 2. Авария магистрального газопровода «Ямбург-Елец» как результат развития стресс-коррозии
что с ростом НДС участка трубопровода растет и степень опасности дефектов на этом участке, следовательно, сокращаются сроки для проведения ремонта дефектного участка трубопровода [1-8].
В [9-18] приведены различные способы определения смещений трубопровода. Способы [9-12] требуют дополнительного размещения датчиков у трубопровода.
Для решения задачи мониторинга технического состояния МТ широко применяют внутри-трубные дефектоскопы (внутритрубное подвижное устройство (ВПУ)), позволяющие определить дефекты стенки трубы (коррозионные поражения, в том числе стресс-коррозия; потеря металла, канавки и другие), дефекты поперечного сечения трубы (вмятины, гофры, овальность), дефекты геометрии осевой линии (изгибы). Применение инерциальных измерительных систем позволяет определить геометрию осевой линии МТ, а в совокупности с измерениями координат контрольных точек трубопровода решается задача определения координат обнаруженных дефектов. Наблюдение за состоянием трубопровода от одного обследования к другому позволяет идентифицировать участки трубопровода, подверженные изменению своего положения. Способы
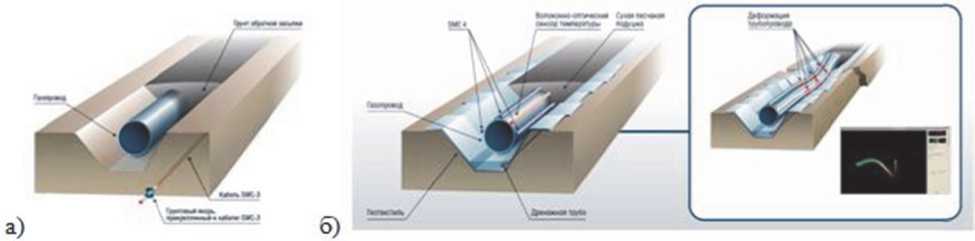
Рис. 4. Примеры систем контроля положения трубопровода: а) датчики размещены поблизости с трубопроводом; б) датчики размещены непосредственно на трубопроводе
[13-18] требуют дополнительного измерения координат маркерных точек, измерения вибраций МТ. Общим недостатком этих способов является невозможность их применения на всех эксплуатируемых трубопроводах без затрат на монтаж или проведение других сопутствующих работ (дополнительные внутритрубные обследования, дополнительное измерение координат трубопровода, дополнительные земляные работы и т.д., рис.5). По этой причине актуальна разработка способа определения смещений трубопровода, позволяющего получать информацию о потенциально опасных участках трубопровода без дополнительных работ.
Применение внутритрубных дефектоскопов возможно на всех действующих трубопроводах. Однако существующая технология эксплуатации МТ предусматривает проведение дефектоскопии не чаще одного раза в несколько лет, а смещения МТ происходят с более высокой частотой и имеют сезонный характер. По этой причине был предложен новый способ определения смещений МТ, отличающийся доступностью к применению на всех эксплуатируемых трубопроводах, высокой производительностью, достаточной точностью определения смещений трубопровода [19]. Способ заключается в проведении многократных пропусков ВПУ с измерительными системами по МТ в рамках регулярной очистки МТ, совместном анализе результатов пропусков в рамках одной очистки и поиске различий в геометрии осевой линии МТ по результатам пропусков, проведенных в различные периоды времени в рамках разных очисток МТ.
В [20] приведены результаты исследования допустимого перемещения МТ различного диаметра для различных категорий участков трубопровода и различных коэффициентов надежности по материалу. Эти величины угловых смещений позволяют сформировать требования к чувствительности измерительных систем внутритрубного устройства – минимальный обнаруживаемый угол изгиба не более 1.4 градуса, радиус изгиба – до 2000м.
Для обеспечения измерения заданных значений кривизны и изгиба трубопровода требуется определить состав измерительных систем ВПУ, подобрать датчики первичной информации для измерительных систем и разработать алгоритмы работы измерительных систем ВПУ.
Для определения изгиба трубопровода и определения его координат успешно применяют инерциальные датчики. Инерциальная измерительная система ВПУ обычно состоит из трех гироскопов и трех акселерометров (рис. 8). При решении задачи ориентации осевой линии МТ используют кинематические уравнения Эйлера или Пуассона, кватернионные уравнения. В рамках разработанного способа предполагается использование инерциальных датчиков средней и низкой точности. Так, к примеру, измерительная система, состоящая из трехкомпонентного волоконно-оптического гироскопа ПНСК-40-016 и кварцевых акселерометров АТ1104 обеспечивает необходимую точность определения изгиба трубопровода [21], а для трубопроводов диаметром до 1000мм допустимо применение микромеханических инерциальных датчиков типа ADIS 16364. В качестве алгоритмов работы бесплатформенной инерциальной системы ориентации использованы корректируемые кинематические уравнения Эйлера [22].
Для определения расстояния, пройденного внутритрубным устройством, наибольшее распространение приобрели колесные одометры [23]. Такие одометры измеряют пройденный путь с шагом несколько миллиметров. Для повышения достоверности определения пройденного пути, на внутритрубном устройстве размещают несколько одометров, формирующих одометрическую систему.
Специфика системы «трубопровод-внутри-трубное устройство» определяет часть погрешностей измерительных систем ВПУ. Основными из таких погрешностей являются: проскальзывание одометра по поверхности трубы, угловое смещение продольной оси ВПУ относительно оси МТ, баллистическая погрешность системы ориентации.
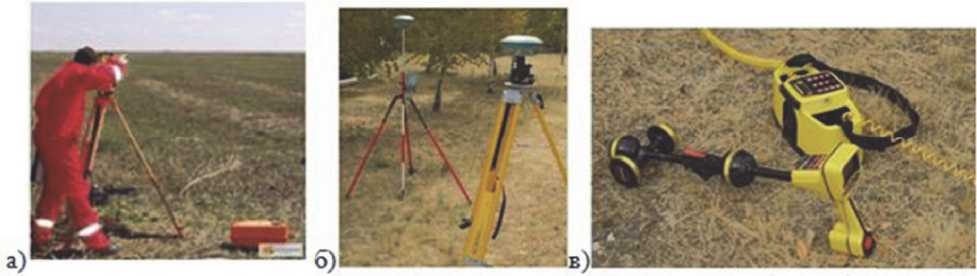
Рис. 5. Элементы технологии определения смещений трубопровода: а) геодезическая съемка, б) приемники спутниковых навигационных систем, в) трассоискатель
Для идентификации и компенсации проскальзывания одометра по поверхности трубы, информацию от одометрической системы обрабатывают по различным алгоритмам, к примеру, по мажоритарной схеме, также используют результаты других внутритрубных обследований и выбирают наибольшее из измерений длин одних и тех же участков трубопровода.
Угловое смещение продольной оси ВПУ относительно оси трубопровода (далее угловое смещение) возникает из-за неравной жесткости опорных манжет, их неравномерного износа или повреждения (рис 6а). На рис. 6а приведен пример углового смещения по каналу тангажа (угол α ). ВПУ при движении по МТ вращается вокруг продольной оси, что в сочетании с угловым смещением приводит к искажению информации об угловом положении оси МТ. В ряде случаев удается компенсировать такую ошибку ориентации при условии вращения с постоянным периодом [24]. На практике вращение ВПУ имеет случайный характер даже при применении направляющих опорных роликов. В случае, когда вращение имеет нерегулярный характер и не удается статистически оценить величину углового смещения, ошибка определения ориентации оси трубопровода будет принята за смещение трубопровода. По этой причине идентификация и компенсация углового смещения является критически важной задачей. Для определения положения внутритрубного устройства относительно трубы предусмотрены два пояса измерителей радиального расстояния. В качестве измерителей радиального расстояния возможно использовать широко применяемые на внутритрубных профилемерах контактные датчики профиля (рис.6 б).
На действующих трубопроводах ВПУ движется в потоке транспортируемого продукта (газ, нефть). Отводы, крановые узлы, ремонтные муфты, а также вмятины и загрязнения приводят к неравномерности скоростного режима. Неравномерный скоростной режим приводит к возникновению баллистической погрешности системы ориентации. Как и угловое смещение, баллистическая погрешность системы ориентации может привести к ошибке при определении смещений МТ.
Современные внутритрубные дефектоскопы все чаще оснащают байпасными устройствами, которые позволяют обеспечить движение ВПУ с заданной скоростью, исключая баллистическую погрешность системы ориентации.
Байпасные устройства относительно дорогие, их проблематично разместить на дефектоскопах малого диаметра и для их работы требуется дополнительное питание. Поэтому для исключения баллистической погрешности был предложен способ регистрации сигналов одоме-трической системы [25] для оценки скорости и ускорения внутритрубного устройства в системе координат трубопровода, схема реализации которого показана на рис.7. На рисунке 7 приняты следующие обозначения: Сч – счетчики импульсов; ИМ – инерциальный модуль; ДПИ – датчики первичной информации; ЦП – центральный процессор.
Другие погрешности измерительных систем ВПУ, имеющие систематический характер, исключают традиционными способами (калибровка, выставка и т.д.).
В рамках разработанного способа определения смещений МТ [19] предполагается применение ВПУ на этапе регулярной и обязательной очистки МТ [26, 27]. Помимо опорных манжет на ВПУ размещают дополнительные очистные манжеты. При этом для очистки МТ проводят несколько пропусков ВПУ, что обеспечивает избыточность измерений и оценки ориентации осевой линии и позволяет идентифицировать и компенсировать случайные погрешности определения ориентации осевой линии МТ, а также случайные погрешности определения пройденного пути.
Измерительные системы разработанного ВПУ состоят из комплексной инерциальной измерительной системы, одометрической системы, системы определения положения снаряда
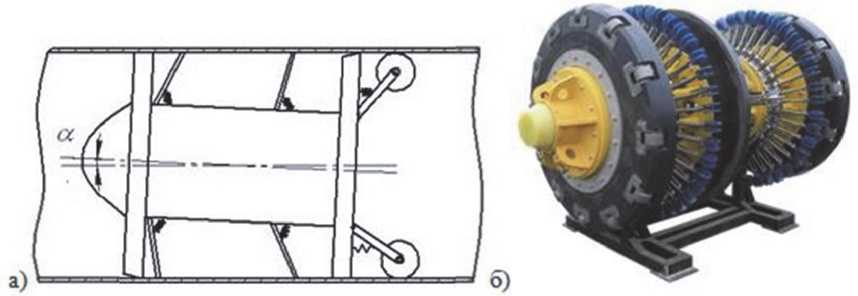
Рис. 6. а) угловое смещение ВПУ относительно МТ; б) внутритрубный профилемер с двумя поясами датчиков
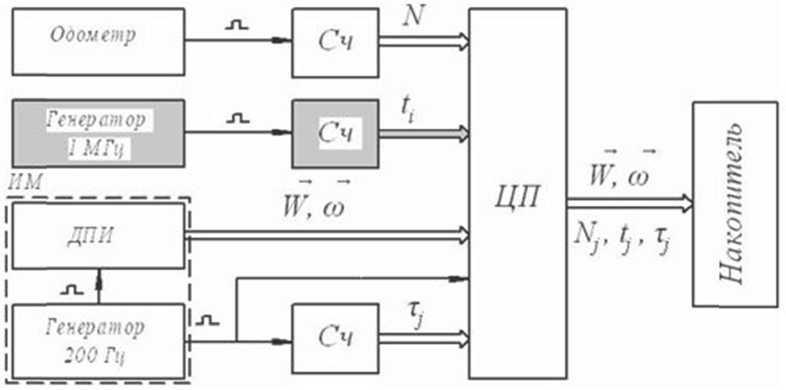
Рис. 7. Схема регистрации сигналов одометра с измерением времени между сигналами
относительно трубы. На ВПУ установлены манжеты, выполняющие функции опорных элементов и элементов, очищающих полость МТ.
Устройство для идентификации смещений трубопровода (рис.8) состоит из герметичного контейнера 1, эластичных манжет 2, датчика пути 3, блока 4 вычислений и управления и бортового регистратора 5, размещенных внутри контейнера 1, два измерителя радиальных расстояний, состоящих из двух поясов преобразователей 6, 7 по N в каждом, размещенных на контейнере 1 в его носовой и хвостовой частях и измерительных модулей, причем каждый пояс содержит соответственно приемопередающие преобразователи 6I, 6II, 6III, 7I, 7II, 7III, при этом номерами 6I, 7I, 6II, 7II, 6III, 7III и т.д. обозначены приемопередающие преобразователи, лежащие в рядах I, II, III и т.д. на образующих, параллельных продольной оси контейнера 1. Чувствительные элементы преобразователей обращены в сторону внутренней поверхности трубопровода и в каждом из поясов они расположены попарно и диаметрально противоположно. Выходы измерителей 6, 7 радиальных расстояний соединены с входом блока 4 вычислений и управления. Бесплатформенный инерциальный измерительный модуль, включающий трехкомпонентный гироскопический измеритель 8 угловой скорости, трехкомпонентный измеритель 9 кажущегося ускорения, выходы которых соединены с входом блока 4 вычислений и управления, причем в состав измерителей приемопередающих преобразователей входят измерительные модули 10.
Герметичный контейнер 1 следует рассматривать в жесткой связи с системой координат OX, причем OX1, 0Х2 и ОХ3 - соответственно продольная, нормальная и поперечная оси устройства, ωx1, ωx2, ωx3 – компоненты вектора абсолютной угловой скорости контейнера 1 и Wx1, Wx2, Wx3 - компоненты вектора кажущегося ускорения герметичного контейнера 1, изме- ряемые соответствующими датчиками инерциального модуля.
После компенсации погрешностей измерительных систем внутритрубного устройства проводят анализ различий ориентации оси трубопровода по результатам обследований, проведенных при очистке в контрольные периоды времени. Все места, в которых геометрия осевой линии трубопровода различается на пороговое значение или больше, идентифицируют как потенциально опасные участки.
После идентификации потенциально опасных участков проводят оценку НДС , например, по методике, описанной в [1]. Уточнение НДС позволяет точнее определить степень опасности дефектов на потенциально опасном участке и предпринять меры по защите трубопровода от аварии. Так, к примеру, ремонт дефектного участка может быть проведен немедленно, а не отложен до следующего планового ремонта, а потенциально опасный участок будет снабжен дополнительными удерживающими устройствами, исключающими подвижки.
Кроме того, разработанный способ позволяет определять координаты трубопровода (при наличии измерений координат маркерных точек трубопровода), а также использовать проектную документацию для определения непроектных изгибов. Информация о непроектном положении трубопровода может быть использована при вводе трубопроводов в эксплуатацию после строительства или проведения капитального ремонта.
Используя предлагаемый способ, удается определить участки трубопровода с изменением геометрии осевой линии. На рис 9, 10, 11 приведены примеры изменения параметров углового и линейного положения трубопровода, определенные разработанным способом. На рис 9, 10 изменения вызваны заменой труб при проведении ремонта. На рис 11 изменения вызваны смещением труб относительно проектного положения.
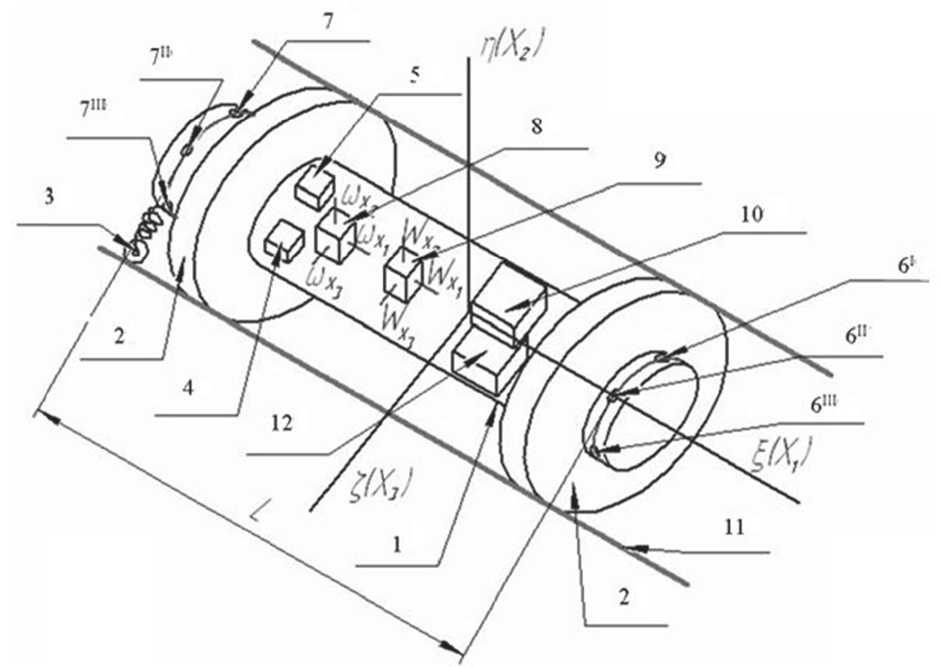
Рис. 8. Внутритрубное устройство
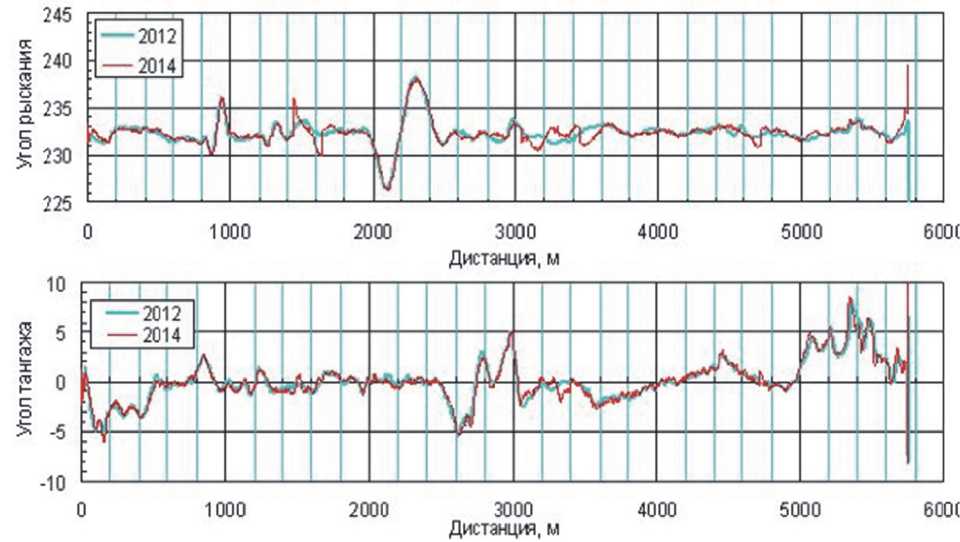
Рис. 9. Углы ориентации осевой линии подводного перехода МТ до ремонта (2012 г.) и после ремонта (2014 г.)
ЗАКЛЮЧЕНИЕ
Результаты натурных испытаний предложенного способа определения смещений трубопровода подтверждают эффек- тивность решения задачи определения ориентации осевой линии МТ по данным, полученным средствами внутритрубной дефектоскопии в ходе проведении многократных обследований МТ.
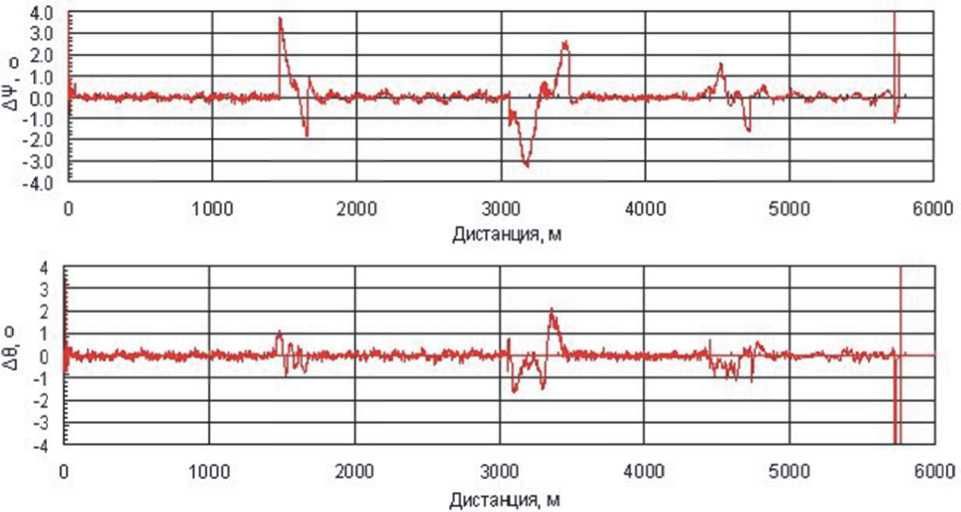
Рис. 10. Результаты идентификации участков МТ с изменившейся геометрией осевой линии.
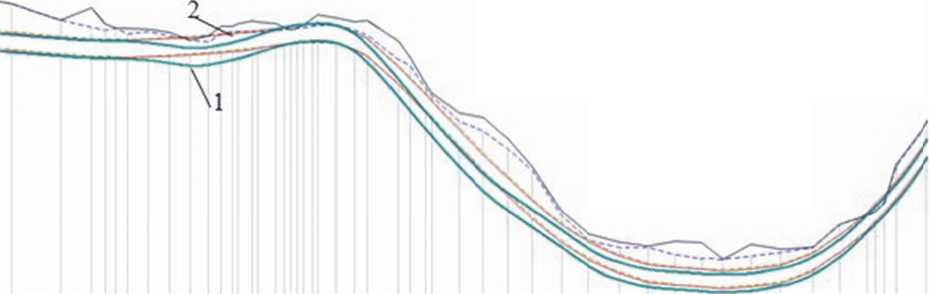
Рис. 11. Положение трубопровода по результатам внутритрубной дефектоскопии (1), приборно-водолазного обследования (2)
Список литературы Повышение точности внутритрубной навигации в условиях сезонных подвижек грунтов
- Рекомендации по оценке прочности и устойчивости эксплуатируемых МГ и трубопроводов КС. -утв. 2006-11-24.-пос. Развилка Ленинский р-н. Московская обл., 2006. 64 с.
- СП 36.13330.2012 Магистральные трубопроводы. Актуализированная редакция СНиП 2.05.06-85*. М.: 2013. 97с.
- СНиП 2.05.06-85* Магистральные трубопроводы. Госстрой. М.:ЦИТП Госстроя, 1997 г. 71с.
- СТО Газпром 2-2.3-173-2007: Инструкция по комплексному обследованию и диагностике магистральных газопроводов, подверженных коррозионному растрескиванию под напряжением
- СТО Газпром 2-2.3-112-2007 Стандарт организации. Методические указания по оценке работоспособности участков магистральных газопроводов с коррозионными дефектами.
- СТО Газпром 2-2.4-083-2006 Инструкция по неразрушающим методам контроля качества сварных соединений при строительстве и ремонте промысловых и магистральных газопроводов.
- ОСТ 23.040.00-КТН-574-06 Стандарт отрасли. Нефтепроводы магистральные. Определение прочности и долговечности труб и сварных соединений с дефектами.
- РД 153-39.4-067-04 Руководящий документ. Методы ремонта дефектных участков действующих магистральных нефтепроводов. ОАО»Акционерная компания по транспорту нефти « Транснефть».
- Обнаружение подвижек грунта -переоборудование трубопровода для мониторинга нестабильной почвы. URL: http://www.lscom.ru/omnisensp.html (дата обращения 5.11.2017).
- Мониторинг деформации трубопровода и подвижек грунта на объекте магистральный газопровод «Сахалин-Хабаровск-Владивосток». URL: http://lscom.ru/case_studies/cs-009_skv.pdf (дата обращения 5.11.2017).
- Маловичко А.А., Маловичко Д.А., Султангареев Р.Х., Маловичко А.А. Способ выявления потенциально аварийно опасных участков на трассах газопроводов, подверженных коррозионному растрескиванию под напряжением. Пат. 2410723 (РФ). 2008.
- Баканов Ю.И., Сусликов С.П., Кобелева Н.И. Способ мониторинга за опасными геодинамическими процессами. Пат. 2467287 (РФ). 2011.
- Вайсберг П.М., Эмдин М.Ф., Гердов М.Г. Универсальный диагностический снаряд-дефектоскоп для контроля за состоянием трубопровода. Пат. 2111453 (РФ). 1993.
- John R. Adams, Patrick S. Price, Jim W. Smith. Трубопроводная мониторинговая система на основе инерциальных датчиков. Пат. 4945775 (США) 1989.
- Плотников П.К., Бакурский Н.Н., Рамзаев А.П. Устройство для определения и регистрации геометрических параметров трубопроводов. Пат. 2102704 (РФ). 1994.
- Синев А.И., Рамзаев А.П., Макаров В.З. Способ определения локальных участков магистральных трубопроводов с максимальной деформацией, Пат.2272248 (РФ). 2004.
- Плотников П.К., Синев А.И., Рамзаев А.П. Способ определения локальных смещений магистральных трубопроводов, Пат. 2206871 (РФ). 2001.
- Мирошник А.Д., Гурин С.Ф., Кирьянов М.Ю. Устройство диагностического комплекса для определения положения трубопровода и способ определения относительного перемещения трубопровода по результатам двух и более инспекционных пропусков диагностического комплекса для определения положения трубопровода. Пат. 2558724 (РФ). 2013.
- Никишин В.Б., Брюзгин Г.В., Синев А.И.,Братчиков Д.Ю., Чигирев П.Г., Алешкин В.В., Рамзаев А.П. Способ идентификации смещений осевой линии трубопровода. Пат. 2621219 (РФ). 2016.
- Брюзгин Г.В. Об актуальности измерения углов ориентации оси трубопровода при анализе напряженно-деформированного состояния опасных участков//Успехи современной науки. Т.2. Белгород: Эпицентр, 2017. С. 66-71
- Брюзгин Г.В. Идентификация смещений трубопровода средствами внутритрубной дефектоскопии//Проблемы управления, обработки и передачи информации (УОПИ-2015): сб. трудов IV -Междунар. науч. конф. Саратов: Сарат. гос. техн. ун-т, 2015.
- Плотников П.К. Элементы теории работы одной разновидности бесплатформенных инерциальных систем ориентации//Гироскопия и навигация. 1999. № 3. С. 23 -35.
- Синев А.И., Плотников П.К., Никишин В.Б. Внутритрубный снаряд-дефектоскоп с одометрами. Пат. 2306479 (РФ). 2005.
- Синев А.И., Никишин В.Б., Ульянов А.В., Никишина С.Г., Копичева А.А. Система определения координат трассы подземного трубопровода. Пат. 2437127 (РФ).2010.
- Повышение точности оценивания параметров поступательного движения внутритрубного инспектирующего снаряда по сигналам одометрической системы/Г.В. Брюзгин, В.Б. Никишин, А.М. Боронахин, П.Г. Чигирев, В.С. Шорин//Труды ФГУП НПЦАП. Системы и приборы управления. 2014. № 1. С. 39-44.
- Правила проведения обследований коррозионного состояния магистральных нефтепроводов: ПР 13.02-74.30.90-КТН-003-1-00 -утв. ОАО «АК «Транснефть» 2000.11.03. г. ГУП Издательство «Нефть и газ» № 2003.
- Правила эксплуатации магистральных газопроводов: СТО Газпром 2-3.5-454-2010 -утв. ОАО «Газпром» 2010.05.24. М: ОАО «Газпром».
