Прецизионная стабилизация скорости движения изображения в орбитальном телескопе землеобзора

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4-6 т.18, 2016 года.
Бесплатный доступ
Рассматривается система стабилизации скорости движения изображения, встроенная в орбитальный телескоп, который применяется для сканирующей оптико-электронной съемки наземных объектов. Выполнен синтез алгоритмов дискретной фильтрации сигнальной информации, кратко указаны цифровые законы управления пьезокерамическим приводом с учетом временного запаздывания. Представлены результаты по эффективности встроенной системы стабилизации скорости движения изображения.
Космический землеобзор, скорость движения изображения, стабилизация
Короткий адрес: https://sciup.org/148204824
IDR: 148204824 | УДК: 629.78
Precise stabilization of an image motion veloсity in a land-survey orbital telescope
We have considered an image motion velocity stabilization system embedded in an orbital land-survey telescope applied for a scanning optoelectronic observation of terrestrial objects. We carried out synthesis of algorithms for filtering a signal information and shortly described the digital control laws of piezo-ceramic driver taking into account a time delay. We have presented results on the efficiency of the embedded image motion velocity stabilization system.
Текст научной статьи Прецизионная стабилизация скорости движения изображения в орбитальном телескопе землеобзора
Рассматривается космический аппарат (КА) землеобзора, оснащенный телескопом с матрицами оптико-электронных преобразователей (ОЭП) в его фокальной плоскости. При съемке заданных участков поверхности Земли совокупностью маршрутов их сканирования телескопом матрицы ОЭП «работают» в режиме временной задержки и накопления (ВЗН). К системе управления ориентацией (СУО) маневрирующего спутника землеобзора предъявляются уникальные требования по точности стабилизации его движения при сканирующей оптико-электронной съемке. Для решения этой проблемы обычно применяются астроинерциальная система определения углового положения спутника и силовой гироскопический комплекс на основе избыточного числа гиродинов [1]. Между тем в космической технике оптико-электронного наблюдения известен принципиально другой способ стабилизации движения изображения. Он основан на применении в оптической схеме телескопа компенсатора движения изображения (КДИ), изменение положения которого приводит к смещению лучей, формирующих изображение. Для космических телескопов наиболее рациональным является
КДИ в виде плоского зеркала, расположенного вблизи фокальной плоскости (ФП) телескопа [2]. При совместной работе (i) СУО спутника и (ii) встроенной в телескоп системы стабилизации движения оптического изображения требуемая точность достигается нониусным способом: I каскад – стабилизация углового движения объектива телескопа, II каскад – стабилизация движения изображения в ФП телескопа [3,4].
В статье впервые исследуется система стабилизации скорости движения изображения (СДИ), встроенная в орбитальный телескоп, который применяется для сканирующей оптикоэлектронной съемки наземных объектов. Здесь принципиальные проблемы состоят в синтезе алгоритмов обработки сигналов для офсетного гидирования по скорости изображения в центре фокальной плоскости телескопа, в разработке математической модели привода для прецизионных перемещений КДИ и алгоритмов цифрового управления.
СИСТЕМА СТАБИЛИЗАЦИИ СДИ
Используются стандартные системы координат (СК) – инерциальная (ИСК) с началом в центре Земли, геодезическая гринвичская (ГСК), горизонтная (ГорСК) с эллипсоидальными геодезическими координатами L, B и H , орбитальная (ОСК) и связанная с КА (ССК) системы координат с началом в его центре масс O . Вводятся телескопная СК (ТСК, базис S ) с началом в центре оптического проектирования S , СК поля изображения Oixi yizi (ПСК, базис F ) с началом в центре Oi ФП телескопа и визирная СК (ВСК, базис V) с началом в центре Ov центральной матрицы ОЭП.
При стандартных обозначениях, принятых в оптических телескопах [5], на рис. 1 представлена схема Ричи-Кретьена, дополненная КДИ в виде плоского диагонального зеркала, которое расположено в сходящемся пучке лучей вблизи ФП объектива. Основная идея встроенной в телескоп системы стабилизации СДИ на поверхности ОЭП с ВЗН приведена на рис. 2. Здесь в объективе 1 телескопа по схеме Ричи-Кретьена дополнительно имеются:
-
. КДИ 2 в виде плоского качающегося диагонального зеркала;
-
. датчик офсетного гидирования (ДОГ) 3 по скорости движения изображения в центре фокальной плоскости (отмечено красным цветом), который реализуется с помощью цифровой обработки сигналов от четырех эталонных ОЭП с ВЗН (помечено синим цветом), которые закреплены в четырех углах единой матрицы ОЭП с ВЗН в ФП телескопа;
-
. преобразователь 4 цифровых сигналов, поступающих на привод 5;
-
. привод 5, обеспечивающий угловые перемещения КДИ 2.
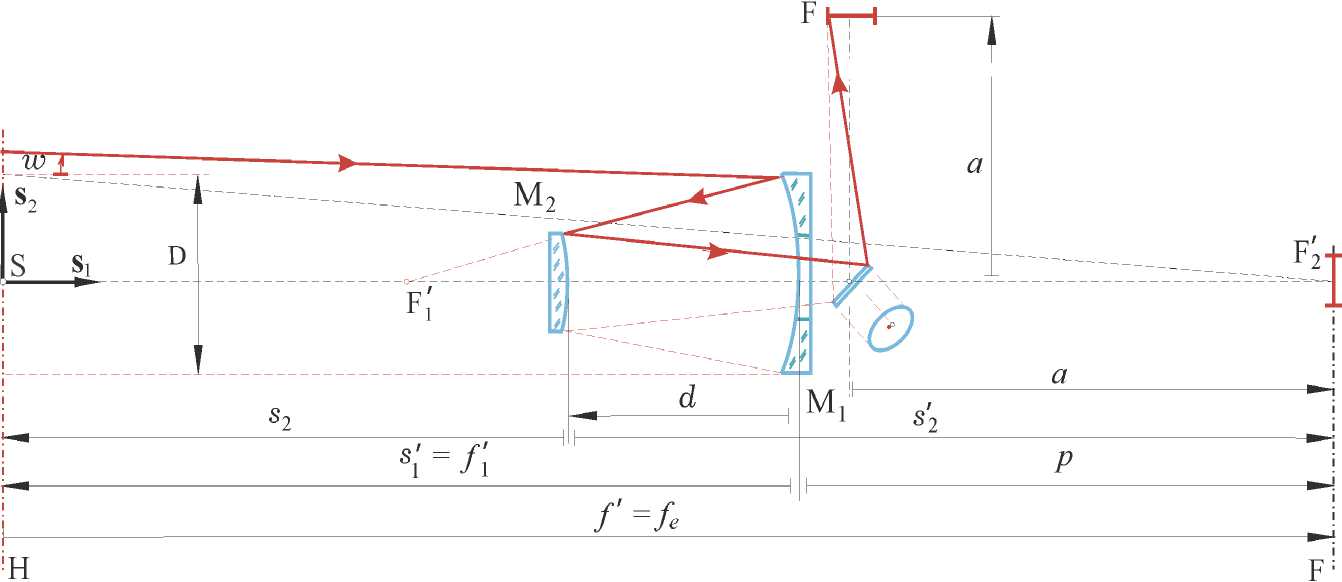
Рис. 1. Оптическая схема телескопа с компенсатором движения изображения
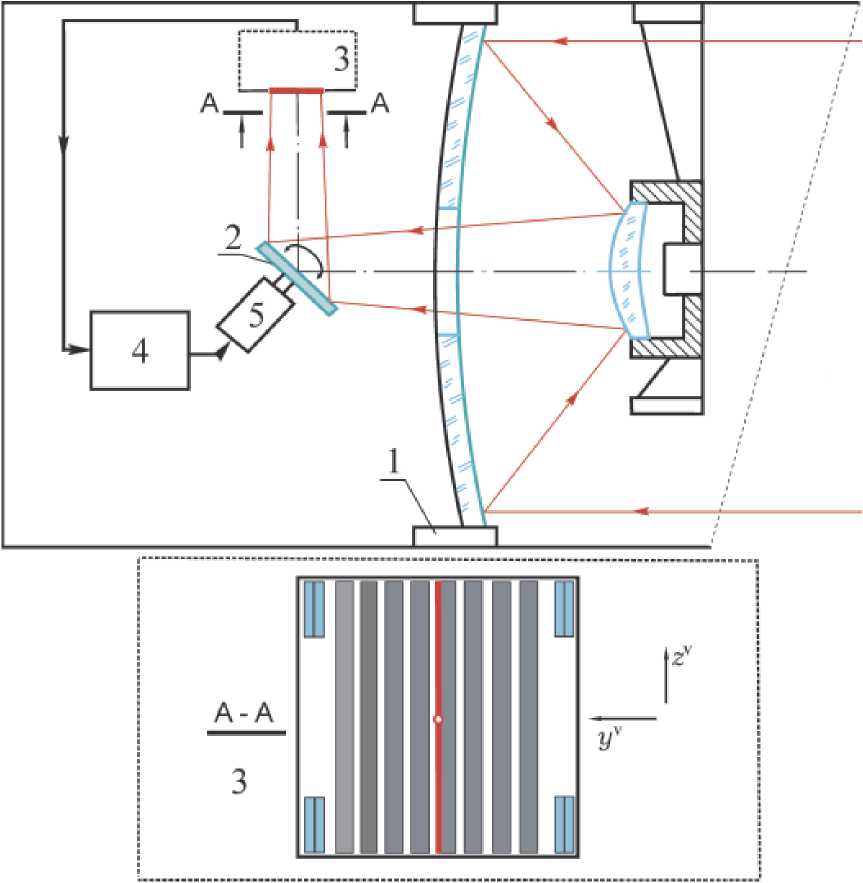
Рис. 2. Схема системы стабилизации СДИ в фокальной плоскости телескопа
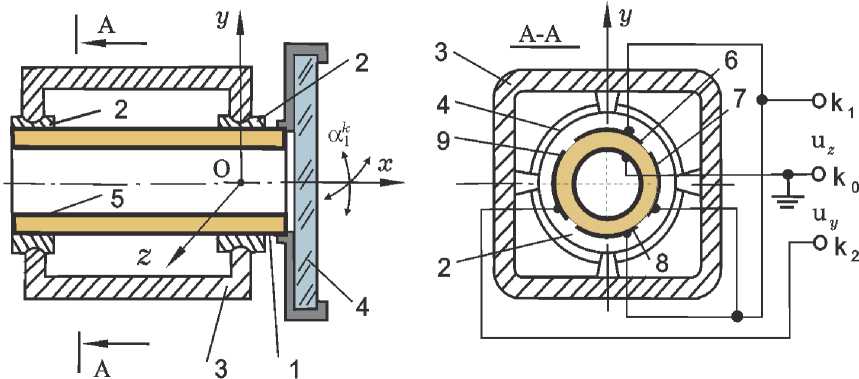
Рис. 3. Схема пьезокерамического привода КДИ
На рис. 3 представлена схема разработанного пьезокерамического привода КДИ [6], который имеет трубчатую конструкцию с возможностью изгиба в двух ортогональных плоскостях и содержит пьезокерамический элемент (ПКЭ) (1), эластичные прокладки (2), корпус (3) и КДИ (4) – плоское зеркало.
С помощью прокладок (2) ПКЭ свободно закреплен по краям к корпусу (3) в двух ортогональных плоскостях. КДИ (4) жестко закреплен на конце ПКЭ (1) так, что его отражающая плоскость ортогональна оси ПКЭ. Трубчатый ПКЭ имеет пять электродов: общий электрод (5) на его внутренней поверхности и 4 внешних электродов (6) – (9), расположенных вдоль ПКЭ так, что плоскости симметрии противоположных электродов являются ортогональными.
Продольные части ПКЭ имеют противоположные направления радиальной поляризации под противоположными электродами. При подаче управляющего напряжения на клеммы k 1 л k0 (или клеммы k2 л k0 ) участки ПКЭ под электродами 6 л 8 (соответственно под электродами 7 л 9 ) за счет обратного поперечного пьезо-эффекта деформируются в противоположных направлениях и поэтому ПКЭ изгибается только в соответствующих плоскостях. Следовательно, трубчатый ПКЭ на рис. 3 является эквивалентом управляемого шарнира Гука с двумя степенями свободы.
В процессе работы описанной системы обеспечивается прецизионная стабилизация продольной и поперечной скоростей движения оптического изображения в центре фокальной плоскости с автоматической компенсацией нестабильности частоты передачи накапливаемых зарядов вдоль столбцов информационных ОЭП, которые отмечены серым цветом на рис. 2.
ПОСТАНОВКА ЗАДАЧ
Задачи статьи состоят в синтезе основных алгоритмов обработки сигналов для офсетного
гидирования по скорости изображения в центре ФП телескопа, в анализе особенностей модели пьезокерамического привода для перемещений КДИ, в описании алгоритмов цифрового управления этим приводом, а также в представлении численных результатов для оценки эффективности системы прецизионной стабилизация СДИ в центре ФП телескопа.
АЛГОРИТМЫ ДОГ
Пусть векторы ю е и v S представляют в ТСК
угловую скорость и скорость движения центра масс КА относительно ГСК, матрица C = | у- | определяет ориентацию ТСК относительно ГСК, а скалярная функция D ( t ) является дальностью наблюдения по линии визирования. Тогда для любой точки в ФП телескопа продольная
_у у уу
V y = V y ( У ,у ) и поперечная V z = V z (у ,у ) ~; ,У У составляющие вектора-столбца V = { Vy , V z } нормированной СДИ вычисляются по соотно-
шению [7]
~ .
V i
y i у i
z
is
q V e1
s
q V e 2
-—’ 7 х ■—- i x
- У Ю е3 + z Ю 2
-
i у s
q V e3 +
Ю е3 — УХ 1
® e 2 +ух 1
. (1)
Здесь y = y / je и z = z / fe являются нормированными фокальными координатами указанной точки, где fe – эквивалентное фокусное расстояние телескопа (см. рис. 1), скалярная функция q = 1 — ( c 2 y + c 3 z )/ c 1 и компоненты вектора у ( t ) = {v^.( t ) i = 1,2.3 = 1 ^ 3} нормированной скорости движения центра
масс спутника вычисляются по соотношению vsei= v e . ( t )/ d ( t ) .
Принципиальная возможность определения вектора V i нормированной СДИ и углового перемещения КА землеобзора непосредственно по космическим снимкам наземных объектов,
получаемых в реальном времени при сканирующей оптико-электронной съемке, возникает при наличии не менее двух линеек ОЭП, близко расположенных в ФП телескопа с обязательным перекрытием в направлении продольной СДИ. Авторская методика решения такой задачи кратко представлена в [8]. Четыре эталонные матрицы содержат по две линейки ОЭП, см. рис. 2, что позволяет в каждой из них в реальном времени определять набор значений векторов нормированной СДИ и по методу наименьших квадратов вычислить значения векторов нормированных
~ ~ ~
СДИ V p = {V p , V p } для четырех точек (y p ,у ) , p = 1 ^ 4 - центров четырех матриц эталонных ОЭП. Отметим, что здесь рационально выполнять
параллельные вычисления на индивидуальном микропроцессоре для каждой эталонной матрицы ОЭП. Соотношение (1) представляется в виде {V y , V } = Q l + P l №, где
Q 1 (У1 ,y ) = q
si
V e1 y
~s
+ V e 2
si
V e1 z
^—/ e
+ v s3
p 1^1 ) =
~i z
~
y~ i - (1 + ( y )2)
1 + (~ l )2 - уУ
На основе такого представления (1) для центров четырех матриц эталонных ОЭП с нормированными координатами (y ^ , у1 р ) получается соотношение Q p = P p to p , где векторы to p = { to p } , Q p = V p - Q l (~,~ p ) и матрица P p = P l ( y p ,~ p ) . В совокупности для центров всех четырех матриц эталонных ОЭП получается матричное соотношение Q l s = P ^ to p ,где столбец Q ; = { Q p } и прямоугольная матрица P j = { P p } .
Оценка to S вектора угловой скорости КА непосредственно по космическим изображениям наземных объектов вычисляется по методу наименьших квадратов как со р = ( P ^ ) # Q ^ , где ( P ^. ) # – псевдообратная матрица в отношении матрицы
P j . Оценка (O s используется для вычисления вектора V™ = {V y^ , Vzl ^ m } в виде y m y s s s ~ s s
V o = { q Ve2 - to e3 ’ q Ve3 +to e2} . (2)
СДИ в центре (; y 0 = 0,y l3 = 0 ) матрицы информационных ОЭП (см. красную линию в фокальной плоскости телескопа и её центр на рис. 2) на основе анализа космических изображений наземных объектов, поступающих в реальном времени. Вектор Vl0 m (2), сформированный по кратко представленному здесь алгоритму, представляет выходной сигнал ДОГ – вектор измеренной СДИ в центре ФП при фиксированном номинальном угловом положении КДИ.
МОДЕЛИРОВАНИЕ ФИЗИЧЕСКОГО ГИСТЕРЕЗИСА ПЬЕЗОПРИВОДА
Основная проблема моделирования и исследования динамики пьезопривода связана с гистерезисом пьезокерамики, применяемой в его конструкции при совмещении свойств упругого подвеса КДИ и собственно электромеханического движителя. Фундаментальная проблема нелинейного анализа систем с гистерезисом исследовалась многими авторами [9]. Математическая модель пьезокерамического привода разработана в [10], где физический гистерезис описывается дифференциальным включением с разрывной правой частью. Такая единая модель имеет 6 параметров и позволяет адекватно представлять широкий класс гистерезисных характеристик. В качестве примера на рис. 4 в нормированном виде приведены два вида характеристик физического гистерезиса единой математической модели, где отличаются только три параметра. Нормированная статическая гистерезисная характеристика пьезокерамического привода КДИ в меридиональной плоскости телескопа (рис. 3, управляющее напряжение u z ) представлена на рис. 5.
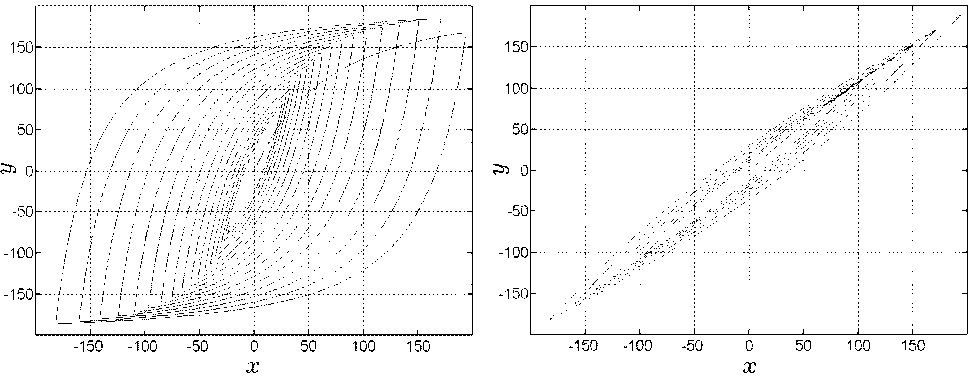
Рис. 4. Два вида характеристик физического гистерезиса единой математической модели
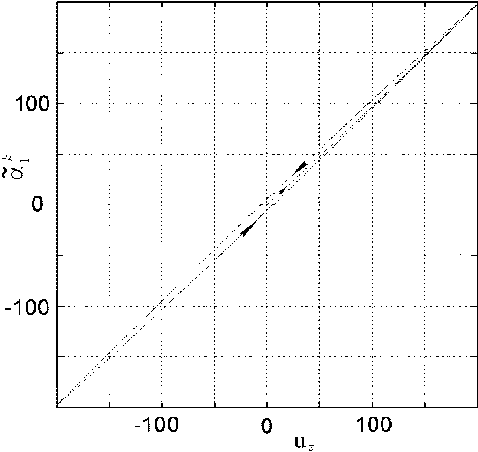
Рис. 5. Статическая характеристика пьезокерамического привода
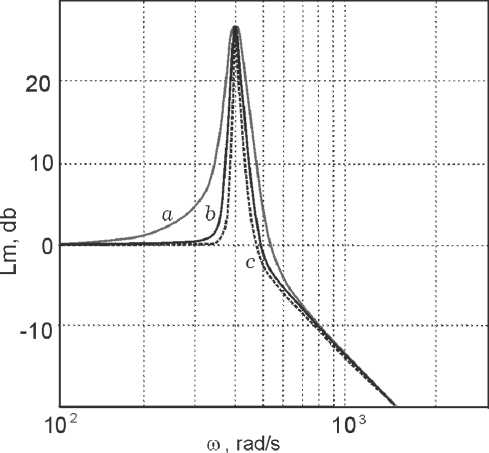
Рис. 6. Логарифмические амплитудные характеристики моделей пьезопривода
На рис. 6 приведены нормированные логарифмические амплитудные характеристики двух моделей пьезопривода – линейная модель ( a ) и нелинейная модель ( b ) с идентификацией всех шести параметров гистерезисной характеристики, а также логарифмическая амплитудная характеристика ( c ), построенная на основе экспериментальных данных. Анализ представленных результатов подтверждает приемлемую адекватность разработанной нелинейной модели пьезокерамического привода КДИ с резонансной частотой 63.7 Гц. Как следует из рис. 6, собственные колебательные свойства пьезопривода КДИ практически не проявляются вплоть до частоты 37 Гц.
ДИСКРЕТНАЯ ФИЛЬТРАЦИЯ И ЦИФРОВОЕ УПРАВЛЕНИЕ
~ ~_- ~_- ~_-
Пусть вектор V* = {Vy*,Vz*} = {Vyl*,G} является вектором заданной нормированной СДИ в центре ФП телескопа, а вектор Vlo = {Vyo, Vo} представляет фактическую скорость движения изображения в этой же точке ФП. При фиксированном номинальном угловом положении КДИ вектор AV1 погрешности стабилизации СДИ в центре (~‘0 = G,~i = G ) матрицы информационных ОЭП (см. красную линию на рис. 2) формируется по соотношению AVl = V - Vi = {Avy, AVlz} = {AVi, Vzi} , . ~,- ~,- ~,- ~- ~- где A Vy = Vyo - Vy* и Vz = Vzo. Если же угловое положение КДИ изменяется с помощью его пьезокерамического привода, то вектор 5AVl = {5A V1,5 VZ} погрешности стабилизации СДИ в центре ФП формируется с учетом таких подвижек КДИ и коэффициентов оптической редукции. При этом алгоритмы ДОГ и вектор заданной нормированной СДИ 'V* позволяют вычислить вектор 5VlOm погрешности (рассогласования) СДИ в центре ФП с учетом работы встроенной в телескоп системы стабилизации СДИ. Нетрудно убедиться, что данная система является замкнутой – измеренное рассогласование СДИ поступает на пьезопривод КДИ, изменение положения которого приводит к устранению указанного рассогласования одновременно как в ДОГ на основе цифровой обработки сигналов эталонных матриц ОЭП, так и на информационных матрицах ОЭП.
В контуре системы стабилизации СДИ используются дискретная рекуррентная фильтрация векторного рассогласования 5 V l Om с частотой 32 Гц и рекуррентный цифровой закон управления пьезоприводом КДИ с частотой 16 Гц, который с учетом временного запаздывания [11] обеспечивает астатизм первого порядка и ширину полосы пропускания контура 5.7 Гц.
На рис. 7 представлены графики погрешности компонентов вектора нормированной СДИ в центре ФП без включения (синий цвет) и при включении (красный цвет) системы стабилизации СДИ с применением таких обозначений: V i - поперечная СДИ; 5 V Z - погрешность стабилизации поперечной СДИ при включении встроенной систем ~ ы; A V y — рассогласование продольной СДИ; 5A V y, – погрешность стабилизации рассогласования в нормированной продольной СДИ при включении встроенной системы.
Нормированные продольная и поперечная СДИ вычисляются по формулам V y = V y / f e и V \ = V\ / f e , где f e - эквивалентное фокусное расстояние телескопа [м], а V, y и V\- натуральные линейные продольная и поперечная СДИ с размерностью [м/c]. Поэтому нормированные
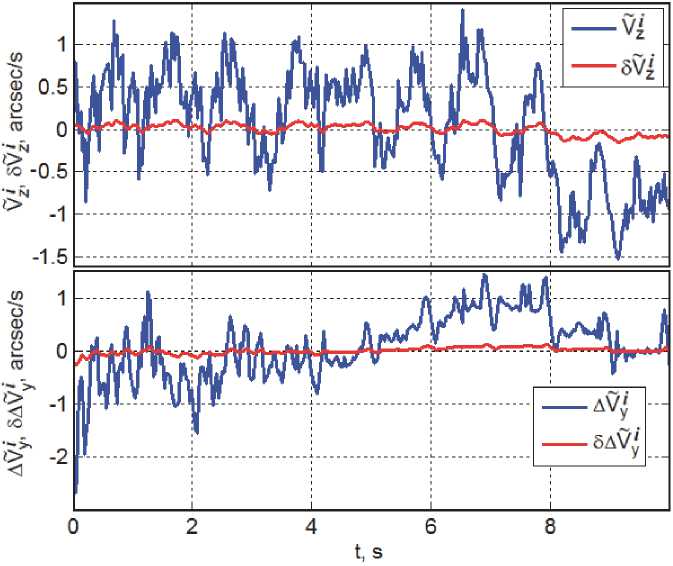
Рис. 7. Графики погрешностей стабилизации компонентов вектора СДИ без включения (синий цвет) и при включении (красный цвет) встроенной системы
СДИ в центре ФП на рис. 7 имеют размерность угловой скорости.
ЗАКЛЮЧЕНИЕ
Научные и научно-технические проблемы углового наведения, высокоточного определения углового положения и управления ориентацией маневрирующих спутников землеобзора общеизвестны, требования по точности стабилизации движения таких КА при сканирующей оптикоэлектронной съемке весьма сложно выполнить традиционными способами.
В статье предложен нониусный способ прецизионной стабилизации скорости движения оптического изображения в ФП орбитального телескопа: I каскад –стабилизация углового движения корпуса телескопа, II каскад – стабилизация скорости движения изображения с помощью специальной оптико-механической системы, встроенной в телескоп.
Выполнен синтез основных алгоритмов обработки сигналов для офсетного гидирования по скорости изображения в центре ФП телескопа, рассмотрены особенности моделирования и исследования статических и динамических характеристик пьезокерамического привода для перемещений КДИ и кратко указаны разработанные алгоритмы цифрового управления с учетом временного запаздывания. Представлены численные результаты, которые подтверждают эффективность предлагаемой системы прецизионной стабилизации СДИ в центре ФП орбитального телескопа.
Список литературы Прецизионная стабилизация скорости движения изображения в орбитальном телескопе землеобзора
- Somov Ye., Butyrin S., Somov S. Guidance and robust gyromoment attitude control of agile observation satellite//Proceedings of 18th IFAC Symposium on Automatic Control in Aerospace. Nara. 2010. P. 218-223.
- Сомов Е.И., Дулькин Л.З. Астрономический телескоп с прецизионной стабилизацией положения изображения. Авторское свидетельство СССР № 558595. 1975.
- Siguerdidjane H., Somov Ye. Nonius guidance and robust image motion stabilization of a large space astronomical telescope//Proceedings of 18th IFAC World Congress. Milan. 2011. P. 5142-5147.
- Сомов Е.И., Бутырин С.А. Техническое зрение в системе нониусной стабилизации изображения космического астрономического телескопа//Техническое зрение. 2013. № 1. С. 5-14.
- Михельсон Н.Н. Оптические телескопы. Теория и конструкция. М.: Наука. 1976.
- Сомов Е.И. Устройство для отклонения луча. Авторское свидетельство СССР № 543301. 1974.
- Оптимизация режимов сканирующей оптико-электронной съемки и 3D-анимация движения маневрирующего спутника землеобзора/Е.И. Сомов, С.А. Бутырин, Т.Е. Сомова, С.Е. Сомов//Техническое зрение. 2013. № 1. C. 15-22.
- Сомов Е.И., Бутырин С.А. Комплексирование наблюдательной и навигационной информации для верификации работы системы управления спутника и улучшения измерительных свойств космических снимков//Механика, управление и информатика. 2012. № 8. С. 138-142.
- Красносельский М.А., Покровский А.В. Системы с гистерезисом. М.: Наука. 1983.
- Somov Ye. Model of physical hysteresis and control of the image motion oscillations at a large space telescope//Proceedings of 2nd International Conference on Control of Oscillations and Chaos. Saint Petersburg. 2000. Vol. 1. P. 70-75.
- Сомов Е.И. Робастная стабилизация упругих космических аппаратов при неполном дискретном измерении и запаздывании в управлении//Известия РАН. Теория и системы управления. 2001. № 2. С. 124-143.
