Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения и с другими типами двигателей

Автор: Григорьев Максим Анатольевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 34 (167), 2009 года.
Бесплатный доступ
Рассмотрены предельные возможности электроприводов с традиционными конструкциями электрических машин (асинхронный двигатель, синхронные реактивные машины) и нетрадиционными (синхронная реактивная машина независимого возбуждения). Обращается внимание на перспективы использования новых типов машин.
Электропривод с синхронной реактивной машиной независимого возбуждения, электромагнитные нагрузки, предельные показатели
Короткий адрес: https://sciup.org/147158083
IDR: 147158083 | УДК: 621.311
Extreme indexes of electric drive with field regulated reluctance machine and with other electrical machine
The article considers the extreme indexes of induction motor, Brushless DC motor, Synchronous Reluctance Motor and Field Regulated Reluctance Machine. Attention is paid to applications of these new drives.
Текст краткого сообщения Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения и с другими типами двигателей
Введение. Удельные показатели электроприводов и, в первую очередь, момент на единицу массы является одним из основных факторов, улучшение которого способствует решению задачи ресурсосбережения. По сравнению с 1913 г. масса электроприводов (на примере асинхронных) современных серий снижена более чем в 3 раза. Наиболее значительное снижение массы было достигнуто в период 1920-1950 гг. В последнее десятилетие XX века сокращение массы составило не более 5 % [2]. В рамках серийных электроприводов дальнейшее снижение массы будет ещё труднее обеспечить при практически неизменном уровне энергетических показателей электропривода. Даже небольшой процент сокращения расхода активных материалов потребует серьёзных работ по усовершенствованию конструкции, технических свойств изоляционных и магнитных материалов.
Новый подход к разработке электроприводов предусматривает учёт совместной работы вентильного преобразователя и двигателя. Тем более, что уровень развития элементной базы позволяет задавать форму фазного тока в обмотках с высокой точностью воспроизведения сигнала задания.
Новые возможности вентильных преобразователей учитываются при проектировании электроприводов с традиционными конструкциями электрических машин. Так, в асинхронном электроприводе выбор номинальных частоты и напряжения, геометрии машины решаются с учётом новых обстоятельств [1]. Но, как ранее отмечалось, наблюдается определённая степень насыщения возможностей асинхронных электроприводов.
С другой стороны, появление на рынке новых материалов, в частности редкоземельных магнитов, способствовало развитию возможностей бесконтактных двигателей постоянного тока. На базе этих типов электроприводов строятся высокоточные системы. Высокие цены на редкоземельные магниты, технология изготовления этих типов машин сужают область их применения.
Принципиально новый подход к синтезу си-
*Работа проводится в рамках реализации Федеральной целевой программы «Научные и научно-педагогические кадры инновационной России» на 2009-2013 годы.
ловой части электропривода наблюдается в электроприводах с нетрадиционной конструкцией электрических машин (например, вентильноиндукторные, электроприводы с синхронной реактивной машиной независимого возбуждения [5, 8]).
Ниже рассматриваются основные удельные показатели электроприводов с традиционными конструкциями электрических машин, указываются на ограничения предельных показателей с привязкой к принципам работы и конструкции этих электроприводов. Отдельное внимание уделено электроприводу с синхронной реактивной машиной независимого возбуждения (СРМНВ).
Асинхронный электропривод. Современный асинхронный электропривод - это система, построенная по схеме «Преобразователь частоты инверторного типа - асинхронный двигатель». Для обеспечения широкого диапазона регулирования используется векторное управление координатами. Не вдаваясь в детали управления, которое позволяет приблизить зависимость момента от тока статора приближённо одинаковой во всём диапазоне уставок задания скорости, обратим внимание на то, что усовершенствование конструкции асинхронных электрических машин идёт по пути адаптации асинхронных двигателей к преобразователю частоты [1]. Улучшать удельные показатели асинхронных электроприводов становится сложнее в силу того, что в конструкции электрической машины, принципах работы асинхронного двигателя наблюдаются элементы достижения их предельных возможностей: оптимизированы конструкция, обмоточные данные, изоляционные материалы, источники питания.
Рассмотрим выражение для электромагнитного момента асинхронного двигателя, работающего в оптимальной точке (при напряжении, частоте и нагрузке, для которых спроектирован данный двигатель) [4]:
m=/5d;.wx6, где /§, Da - габаритные размеры активных материалов; Л§, В§ - электромагнитные нагрузки; кв -коэффициент формы поля.
Указанное уравнение устанавливает взаимосвязь между величиной номинального электромагнитного момента, массой активных материалов и электромагнитными нагрузками.
В этом уравнении необходимо обратить внимание на обмоточный коэффициент коб, который вводится, чтобы учесть укорочение шага обмотки и её распределение. Укорочение шага и распределение обмотки позволяют снизить влияние высших гармоник, которые, как известно, в трёхфазной машине с синусоидальным возбуждением не создают электромагнитного момента. С другой стороны, укорочение и распределение обмотки приводит к снижению основной гармоники, что и учитывается обмоточным коэффициентом. В серийных асинхронных двигателях он лежит в диапазоне 0,9...0,95. Таким образом, обмоточный ко эффициент показывает, насколько снижается электромагнитный момент по сравнению с т-фазной машиной, в которой ток, протекающий по обмоткам, был бы несинусоидальным, а число фаз стремилось бы к бесконечности. По сути, обмоточный коэффициент - это плата за «синусоидальное возбуждение».
Дальнейшее улучшение предельных возможностей асинхронного электропривода связано с улучшением конструкции машины, позволяющее ещё в большей степени снизить влияние высших гармоник за счёт увеличения электромагнитных нагрузок. Однако предлагаемые варианты малоэффективны.
Электроприводы с синхронной реактивной машиной (СРМ). С середины XX века одним из перспективных электроприводов рассматривался вариант с СРМ. Очевидны преимущества - простота конструкции, бесконтактность, высокая жёсткость вала. Но активному внедрению электропривода с СРМ препятствовали низкие удельные показатели реактивных машин. При синусоидальном возбуждении в корпусе асинхронного электродвигателя удавалось получить электромагнитные моменты, не превышающие половины номинальных в асинхронном прототипе. Вторым недостатком предлагаемого СРМ является, как и в асинхронном электроприводе, существование предельного по перегрузочной способности момента.
На разных этапах развития техники недостатки СРМ преодолевались. Так, для того, чтобы приблизить удельные показатели СРМ к показателям асинхронных электроприводов, в [9] предлагалось с целью увеличения отношения xd [xq усложнить конструкцию ротора, что позволяет снизить влияние поперечной реакции, создающей электромагнитный момент в направлении, встречном к движущему:
где ^ d, Wg - составляющие вектора полного потокосцепления в зазоре по осям d и q; iq, id - составляющие тока статора по осям qi^d.
За счёт усложнения конструкции удаётся улучшить удельные показатели СРМ и получить номинальный момент, составляющий 0,9 от номинального момента асинхронного двигателя [9].
Следующий этап оптимизации массогабаритных показателей электропривода с СРМ был связан с увеличением линейной токовой нагрузки статора. Резерв здесь появляется за счёт отсутствия электрических потерь в роторе (будем считать, что потери на гистерезис и перемагничивание в магнитопроводе отсутствуют). По данным [9] при равенстве электрических потерь в асинхронном двигателе и СРМ, удельные возможности последнего возрастают до 1-1,1 от номинального момента асинхронной машины.
Все указанные решения отражали возможности сетевого СРМ, то есть электропривода с СРМ, питающегося от трёхфазной сети стандартной частоты. Возможности электропривода резко увеличиваются с развитием силовой полупроводниковой и информационной техники. Так, появление надёжных преобразователей частоты и датчиков положения ротора способствовало переходу к новому принципу управления электропривода с СРМ - векторному, что позволило увеличить перегрузочную способность электропривода.
Предложенные решения улучшают удельные показатели, но требуют усложнения конструкции ротора и, соответственно, ведут к снижению его механической прочности. Переход к векторной системе управления решает проблему увеличения перегрузочной способности лишь частично, а именно: позволяет организовать работу электропривода с СРМ на предельной абсолютно мягкой механической характеристике.
Электропривод с СРМНВ. Одним из вариантов, решающим ряд проблем, описанных выше, является электропривод с СРМНВ. Основная идея работы электропривода следующая: если по части обмоток, находящихся над межполюсным промежутком, пропустить ток, то создаётся поток возбуждения, а по другой части обмоток, расположенных над полюсом, пропустить ток, то этот ток будет взаимодействовать с потоком возбуждения и, соответственно возникает электромагнитный момент [5, 3, 7, 9]. Каждая из обмоток статора попеременно выполняет то роль возбуждения, то якоря. Принципиальным обстоятельством здесь является возможность независимого регулирования поля возбуждения и поля реакции якоря.
Для анализа предельных возможностей электропривода с СРМНВ на первом этапе предположим, что машина имеет бесконечное число фаз. Тогда СРМНВ будет аналогична обращённой машине постоянного тока. Так же, как и в электроприводе постоянного тока, по обмоткам статора нет необходимости пропускать синусоидальный ток. В отличие от машин переменного тока с синусоидальным возбуждением, в электроприводе с СРМНВ гармонические составляющие поля возбуждения взаимодействуют и создают полезный момент. Причина этого явления заключается в постоянстве угла момента. По оценкам [6] высшие гармоники увеличивают развиваемый момент примерно на 23 %. Эта цифра показывает реальные резервные возможности нового типа электропривода.
Полезно дать физическое обоснование факту больших перегрузочных моментов рассматриваемого электродвигателя. С этой целью рассмотрим картину магнитных полей в машине постоянного тока и СРМНВ.
В электродвигателе постоянного тока на магнитное поле прямоугольной формы, создаваемое токами обмотки возбуждения, накладывается поле реакции якоря FA (рис. 1), в результате под одним краем полюса индукция в зазоре увеличивается, а под другим - уменьшается.
Строгое совпадение физической и геометрической нейтралей в двигателе постоянного тока приводит (при неучете насыщения магнитной системы) к равным величинам приращений магнитного потока под обоими краями полюса. В результате в ненасыщенной электрической машине постоянного тока увеличение тока якоря не вызывает увеличения магнитного потока.
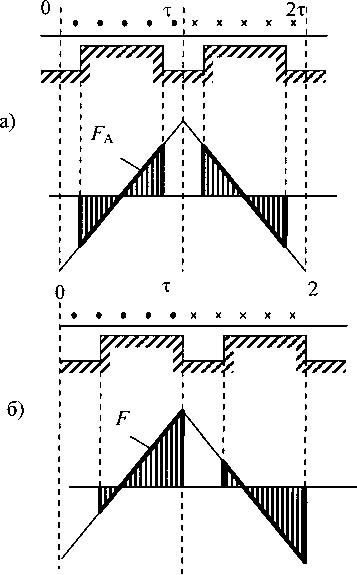
Рис. 1. Развертка машины и МДС реакции якоря: а) в двигателе постоянного тока; б) в СРМНВ
В СРМНВ токи в проводниках обмоток, расположенных напротив межполюсного промежутка, одного знака, поэтому физическая нейтраль смещается на край полюса (см. рис. 1). Это возможно, так как в этом двигателе нет ограничений по условиям коммутации. В результате действие намагничивающей составляющей реакции якоря приходится на полюс, а размагничивающей - на межполюсный промежуток, т.е. в СРМНВ с ростом нагрузки происходит увеличение магнитного потока. Это позволяет добиться высоких удельных моментов, не применяя компенсационную обмотку, сохраняя простую конструкцию электрической машины и не увеличивая расход обмоточной меди.
Возможность независимого управления потоком возбуждения позволяет получать в электроприводе предельные перегрузочные моменты, превышающие значения 5...6 номиналов [8].
Бесконечное число фаз двигателя потребует усложнения схемы силовых цепей вентильного преобразователя. Переход к конечному числу фаз электрической машины приводит к пульсациям электромагнитного момента. Чтобы учесть влияние пульсаций на величину момента, найдём связь между количеством фаз и уровнем пульсаций момента.
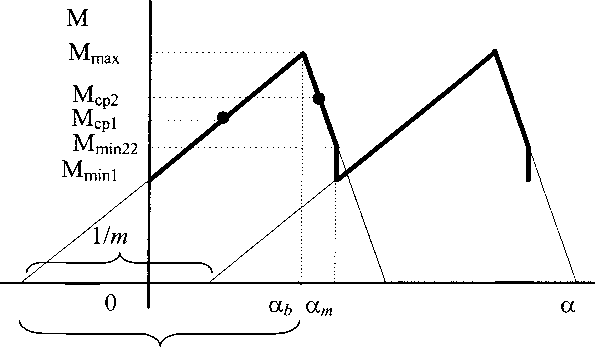
Среднее значение электромагнитного момента можно определить следующим образом (рис. 2):
., М ]6 + М 2(1/т-6)
ср Мт где Мср1 - среднее значение момента на участке 0 -а^ (длина участка в долях от полюсного деления равна h) моментной характеристики (характеристики машины в замкнутой системе), линейно возрастающей от некоторого минимального значения МпцП1, которое будет определяться выбором угла переключения тока в фазе, до Мтах, соответствующего амплитудному значению момента на угловой моментной характеристике; Мср2 - среднее значение момента на участке аь - ат (длина участка равна 1/ти - 6), который изменяется от Мтах до М^п?;
b - участок кривой в долях от полюсного деления, отсчитываемый от момента перехода с одной угловой характеристики на другую (при работе машины в замкнутой системе) до положения, соответствующего максимальному значению электромагнитного момента на угловой характеристике;
Нт - длина фазной зоны в долях от полюсного деления.
Среднее значение электромагнитного момента на участке 0 - аь м = Mmin! + м^ = м,
2а
На участке аь - ат среднее значение момента
CpZ о Шал
2 ( 1-а8 J
Таким образом, среднее значение электромаг нитного момента за период пульсаций
^ ^тах х
(1-сс5)
Ь2 11
--+ 26— + — (1-а5) -аъ т тт
^ шахтер ’ где коэффициентом к^ учитывается снижение среднего значения момента по сравнению с максимальным, связанное с конечным числом фаз. Очевидно, что при увеличении числа фаз кср стремится к единице. Действительно, предел функции k^fim) будет равен единице при условии, что т стремится к бесконечности и, следовательно, к нулю будет стремиться ограниченная функция b =f (т).
Принимая критерием оптимизации максимум среднего значения момента, можно найти оптимальное значение угла начала коммутации тока в обмотке фазы. Функция M=f(b) имеет экстремум (максимум), т.к. по виду зависимости она является квадратичной со знаком минус перед квадратом аргумента. Чтобы определить экстремум функции, найдём её производную и приравняем к нулю, тогда получим
Анализ коэффициента пульсаций показывает, что при шести фазах удаётся значительно снизить уровень пульсаций (коэффициент ^р = 0,67 для трёхфазной схемы и Лср = 0,67 - для шестифазной). При этом СРМНВ можно питать от двух стандартных трёхфазных автономных инвертора напряжения.
Области применения электропривода с СРМНВ. Электропривод с СРМНВ может быть рекомендован для механизмов с тяжёлыми и сверхтяжёлыми условиями эксплуатации, например, для тягового электропривода городского электротранспорта. Городские трамваи с низким полом более удобны для пассажиров, а с высоким полом - дешевле и более технологичны в процессе изготовления и эксплуатации. Достоинства тех и
а§/2
Рис. 2. Угловая характеристика СРМНВ при переключении тока в функции положения ротора, поясняющая определение коэффициента пульсаций кср
других совмещают в себе трамваи со средней высотой пола, но для этого необходимо снизить высоту трамвайных тележек, что достигается применением тяговых электродвигателей с малым внешним диаметром статора. Электроприводы с СРМНВ могут быть выполнены с малой высотой оси вращения благодаря высокой механической жёсткости ротора.
Список литературы Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения и с другими типами двигателей
- Попов, В. И. Современные асинхронные электрические машины: Новая Российская серия RA/В.И. Попов, Т.А. Ахунов, Л.Н. Макров. -М.; Изд-во «Знак», 1999. -256 с.
- Проектирование электрических машин/И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б. Ф. Токарев; под ред. И.И Копылова. -2-е изд. -М.: Энергоатомиздат, 1993. -464 с.
- Статор синхронного реактивного двигателя независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин//Электротехнические системы и комплексы: межвуз. сб. науч. тр. -Магнитогорск: МГТУ, 2007.
- Удельные показатели электропривода с синхронным реактивным двигателем независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин//Вестник Южно-Уральского государственного университета. Серия «Энергетика». -2008. -Выпуск 9. -№11(111). -С. 52-53.
- Усынин, Ю.С Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электричество. -№ 3. -2007.-С. 21-26
- Шмитц, Н. Введение в электромеханику/пер. с англ. Н. Шмитц, Д. Новотный. -М.; Энергия, 1969. -366 с.
- Law, J.D. Design and Performance of Field Regulated Reluctance Machine/J.D. Law, A. Chertok, T. A. Lipo//IEEE Trans. on Industry Applications. -1994, № 5. -P. 1185-1193.
- New Brushless Synchronous Machine For Vehicle Application/Yu. Usinin, M. Grigorjev, K. Vinogradov, S. Gladyshev (The University of Michigan-Dearborn)//SAE International 2007 Word Congress Detroit, Michgan, April 16-19, 2007.
- Vagati, A. Advanced Motor Technologies: Synchronous Motoes and Drives/A. Vagati//Intelligent Motion. -1993. -P. 223-247.
