Приложение вариационно-разностного метода к расчету продольно-поперечного изгиба пластин силами инерции

Автор: Сабиров Рашид Альтавович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (56), 2014 года.
Бесплатный доступ
Разработан вариационно-разностный метод расчета устойчивости тонких пластин на инерционные нагрузки, действующие в базисной плоскости. Краевая задача приводится к обобщенной проблеме собственных чисел. При этом формируются матрицы: первая - матрица жесткости - основана на бигармоническом уравнении С. Жермен, а вторая матрица представляет изменения внутренних напряжений или внутренних усилий, возникающих в пластине. Приложение метода конечных разностей к дифференциальной постановке задачи показало следующее. Матрица жесткости всегда симметричная и положительно определена для закрепленной пластины. Вторая матрица - матрица внутренних усилий при аппроксимации производных функций с применением центральных разностей, от действий сил инерции формируется несимметричной относительно главной диагонали, также могут вырождаться и строки этой матрицы - такова особенность инерционных нагрузок. Несмотря на возможность формирования систем уравнений методом конечных разностей больших размерностей, возникают определенные трудности, если пластина имеет свободные края; следует исключать второй ряд законтурных узлов сетки, что усложняет процедуру вычислений, особенно в углах пластины, внешних и внутренних. Поэтому выполнен переход от дифференциальной формулировки задачи к интегральной формулировке с дискретизацией вариационно-разностным методом. При этом подходе при формировании матрицы жесткости на свободных краях не возникает второго ряда законтурных узлов, в углах не возникают дополнительные узлы сетки; матрица внутренних усилий всегда симметрична - такова особенность приложения интегрального подхода. Матрица внутренних усилий может быть плохо обусловленной, однако этот фактор не влияет на решение задачи определения собственных чисел. В литературе приведено множество теоретических исследований и решений практических задач расчета устойчивости конструкций, в том числе и по расчету продольно-поперечного изгиба тонких пластин. Однако в большей мере это задачи, имеющие положительно определенные операторы. Здесь выполнена определенная поисковая и исследовательская работа приложения вариационно-разностного метода к расчету устойчивости конструкций на различные нагрузки. Дифференциальная формулировка краевой задачи преобразована в вариационную формулировку; приведены критерии устойчивости и решены вопросы аппроксимации дифференциальных операторов для дискретной задачи с конечным числом переменных. Разработаны алгоритмы для математической системы Maple и составлены программы расчета. Приведены два примера расчета пластин. Рассмотрена пластина, жестко закрепленная по всем сторонам; действующие силы инерции изменяются по линейному закону. Также рассмотрена пластина, жестко закрепленная по одной стороне, а по трем другим сторонам пластина свободна от закреплений. Получены значения критических ускорений. Цель - разработать метод расчета пластин на инерционные нагрузки.
Расчет пластин, устойчивость, вариационно-разностный метод
Короткий адрес: https://sciup.org/148177844
IDR: 148177844 | УДК: 539.3
Annex of the variation and differential method for calculation of the longitudinally cross bend of plates by inertia forces
The variation and differential method of calculation of stability of thin plates on the inertial loadings operating in the basic plane is developed. The regional task is given to the generalized problem of own numbers. Thus matrixes are formed: the first, a rigidity matrix - is based on the biharmonic equation of S. Germaine, and the second matrix, represents changes of the internal tension or internal efforts arising in a plate. The annex of a method of final differences to a differential problem definition shows the following. The rigidity matrix always symmetric is also positively defined for the fixed plate. The second matrix to - a matrix of internal efforts at approximation of derivative functions with application of the central differences, from actions of forces of inertia is formed asymmetrical rather main diagonal, also lines of this matrix - such is feature of inertial loadings can also degenerate. Despite possibility of formation of systems of the equations certain difficulties if the plate has free edges arise by method of final differences of big dimensions; it is necessary to exclude the second row the zakonturnykh of knots of a grid that complicates procedure of calculations, especially in corners of a plate, external and internal. Therefore transition from the differential formulation of a task to the integrated formulation with sampling by a variation and differential method is executed. At this approach, when forming a matrix of rigidity at free edges there is no second row the zakonturnykh of knots, in corners there are no additional knots of a grid; - the matrix of internal efforts is always symmetric, such is feature of the appendix of integrated approach. The matrix of internal efforts can be badly caused, however this factor doesn’t influence the solution of a problem of definition of own numbers. The set of theoretical researches and solutions of practical problems of calculation of stability of designs, including by calculation of a longitudinally cross bend of thin plates is given in literature. However, in a bigger measure, these tasks have positively certain operators. There is a certain search and research operation of application of a variation and differential method to calculation of stability of designs on various loadings is performed. The differential formulation of a regional task is transformed to the variation formulation; criteria of stability are given and issues of approximation of differential operators for a discrete task with final number of variables are resolved. The algorithms are developed for mathematical Maple system and programs of calculation are made. Two examples of calculation of plates are given. The plate which is rigidly fixed on all parties is considered; operating forces of inertia change under the linear law. Also the plate which is rigidly fixed on one party, and on three other parties is considered - the plate is free from fixing. Values of critical accelerations are received. The purpose of the work is to develop the method of calculation of plates on inertial loadings.
Текст научной статьи Приложение вариационно-разностного метода к расчету продольно-поперечного изгиба пластин силами инерции
Введение. Элементы тонких пластин, используемые в военно-морских и аэронавигационных структурах, часто подвергаются нормальным и сдвигающим силам, действующим в плоскости пластин [1]. Решения проблем устойчивости имеют практические значения при конструировании ракет, высокоскоростных самолетов, подвергнутых значительным ускорениям [2]. Следует отметить возможность приложения этих решений для проектирования баннеров, тонких ограждений в виде вертикальных консольных пластин, находящихся под действием собственного веса. Поэтому можно заявлять об актуальности рассматриваемой темы.
Дифференциальная формулировка задачи устойчивости . Дифференциальная классическая формулировка задачи о продольно-поперечном изгибе изотропной пластинки в декартовой системе координат известна в литературе, она представлена уравнением равновесия [3]
„ Eh [au av Sxy —------I + —
2(1 + ц) (a у a x
Функции перемещений для (2) могут быть вычислены с помощью уравнений равновесия Сен-Венана [5]:
a fa u a v ) 1 - ц fa 2 u a 2 u -----|--1--I +--| ----- 27 +-- 27 a x (a x a у ) 1+ ц ( a x 2 a у 2
ЭД-ц q
Eh
D [^^w + 2
( dx 4
д 4 w a x2aу 2

a2 w a 2 w _ „ a2 w
— N —7 + N —7 + 2 S --+ q , x a x 2 y a у 2 x a x a у z
в котором D — Eh 3/12(1 - ц2) - цилиндрическая жесткость; Е - модуль Юнга; ц - коэффициент Пуассона; h - толщина пластинки; w — w ( x , у ) - функция прогиба. Мембранные усилия Nx — Nx ( x , у ), N — N ( x , у ), S x, — S x ,( x , у ) правой части (1) выра жаются через перемещения u — u ( x , у ), v — v ( x , у ) базисного слоя на основе закона Гука [4]:
N x —
Eh a u a v Eh a v a u
--7 — + ц— , Ny —--2 — + ц— 1 - ц L a x a у J 1 - ц L a у a x
a fa u a v ) 1 - ц fa2 v a 2 v ) 2(1 - ц ) ...
—I— + —I + —-I—7 +—7 I — —-—— q. . (4) a у (a x a у J 1 + ц (a x 2 a у 2 J Eh
В (3), (4) для задач о действии ускор ений Q x ( x , у ) — hX , Q ( x , у ) — hY , 4 z ( x , у ) — 0, в которых объемные силы равны X — р ax и Y — р ау , зависят от плотности материала р и ускорений ax , ау по направлениям осей координат Ox и Оу соответственно.
Таким образом, сформирована система трех уравнений (1)-(4) относительно трех неизвестных функций u , v , w . К этим уравнениям добавляются статические и геометрические граничные условия. Отметим, что в уравнения (3) и (4) не входят прогибы; задача распадается на две: в первой задаче вычисляются функции u и v по формулам (3), (4), а во второй -определяются функции Nx — Nx ( x , у ), NJ — Nq, ( x , у ), S x y — S xy ( x , у ) по формулам (2) и реализуется проблема собственных чисел, т. е. проблема расчета устойчивости пластины (1).
Обоснование предпочтения интегральной формулировки задачи устойчивости. Критерий устойчивости. При конечно-разностной аппроксимации дифференциальных уравнений (1), (3), (4), а именно, при рассмотрении свободных от закрепления углов пластинки, возникают алгоритмические трудности,
связанные с исключением законтурных узлов. Главной же особенностью является то, что аппроксимация вторых производных функций прогибов в (1) центральными конечными разностями дает несимметричную матрицу внутренних усилий, что затрудняет решение проблемы собственных чисел разрешающей дискретной краевой задачи. Этот факт явно прослеживается при формировании соответствующих матриц продольно-поперечного изгиба стержней [6]. Поэтому целесообразно к расчету пластин на устойчивость от действия сил инерции применить энергетические принципы. Здесь следует обратиться к основам теоретической механики и упомянуть теорему Лагранжа-Дирихле и Ляпунова, устанавливающую равновесие механической системы и определяющую критерии равновесных положений [7]. Для деформируемых конструкций, в частности для пластин, приложение энергетических принципов к проблеме устойчивости приводится в большом количестве научных разработок. Назовем здесь работы [1-5; 8-14], использующие как численные, так и аналитические методы расчета. Пусть
Э Л = Э Л ( w i , w i ,---, w n ) - (5)
функционал Лагранжа конечного числа переменных w , , w , , ..., wn краевой задачи. Приращение полной потенциальной энергии деформирования для вариаций w , + 5 w , , w 2 + 5 w 2,..., wn + 5 wn с удержанием членов не выше второго порядка имеет вид
А ЭЛ = ЭЛ ( w , + 5 w 1 , w 2 + 5 w 2,..., w n + 5 w n ) -
-
-Эл (w„ w2,..., wK) = д Эл + 52Эл/2.(6)
Здесь первая и вторая вариации (5) соответственно равны
5Эл = (дЭл / дwk )5wk,(7)
-
52ЭЛ = (д2ЭЛ / дwkдwl)5wk5wl(8)
с суммированием по повторяющимся индексам: k = 1, 2, ..., к , l = 1, 2, ..., n . Для любого равновесного состояния 5ЭЛ = 0 [8]. В задачах устойчивости о характере равновесия судят по знаку второй вариации функционала: устойчивое равновесие, если 52ЭЛ > 0 для всех допустимых виртуальных перемещений; неустойчивое равновесие, если хотя бы для одного допустимого виртуального перемещения 52ЭЛ < 0 . Но первая верхняя критическая нагрузка соответствует переходу от устойчивых равновесных положений к неустойчивым, следовательно, для этого значения нагрузки должно быть [10; 14; 15]
52Э л = 0. (9)
Введем в (8) операторы варьирования 5 , и 52. Теперь запишем (9) так:
52Э л = 5 2 (51Э л ( w„w 2, ..., w n ;
5 1 w , ,5 , w 2, ..., 5 , w n ; 5 2 w , ,5 2 w 2, ..., 5 2 wn )) = 0. (10)
Условие (9) с учетом (10) эквивалентно следующему уравнению
х
{ 52 w , 52 w ,
д 2 Э
д w1 д w , д 2Э л д w1 д w 2
д 2Э л д w1 д w 2 д 2Э л д w 2 д w 2
д 2Э л д 2Э л
д wn д w, д wn д w2
52 w , } х д 2 Э л
д w1д wn
д 2 Э л
д wn д wn
I 5 w , ] 5, w ,
5, w ,
= 0,
в котором, матрица n х n содержит коэффициенты при вариациях перемещений уравнения (10). Данная система будет иметь решение, отличное от нуля, лишь в том случае, если определитель, составленный из ее коэффициентов, равен нулю [10]. Группировка коэффициентов при независимых вариациях перемещений дает нулевой определитель
|
д 2Э л |
д 2Э л |
д 2 Э л |
= 0. |
(12) |
|
д w1 д w , д 2Э л |
д w 1 д w 2 д 2Э л |
д w1 д wn .. ... |
||
|
д w 1 д w 2 |
д w 2 д w 2 |
|||
|
... д Э |
... . д 2Э л |
.. ... д 2 Э л |
||
|
д wn д w , |
д wn д w 2 |
. д wn д wn |
Коэффициенты в (12) являются функциями параметров жесткости конструкции, соотношения ее размеров. Также они являются функциями внутренних усилий, зависящих в рассматриваемой работе от параметра ускорения. Параметр ускорения есть параметр нагрузки, который является единственной неизвестной характеристикой определителя (12); причем его значения, обращающие определитель в нуль, будут соответствовать критическим значениям нагрузки. Корни системы уравнений (12) определяют n собственных чисел, т. е. все критические нагрузки, в том числе наименьшую из них.
Преобразования дифференциальных уравнений плоской задачи теории упругости в интегральные уравнения. Используя основы вариационных принципов механики [13], дифференциальные постановки рассматриваемой задачи (1), (3), (4) заменим интегральными формулировками. В начале преобразуем уравнения (3) и (4). Для этого составим уравнение возможной работы внешних и внутренних сил
N + дSyx- + Xh 15 u + дx дy J
+
д S„, д N
дx дy
dxdy = 0,
из которого с учетом геометрических уравнений и закона Гука (2) для плоской задачи теории упругости, приемом интегрирования внутренних произведений по частям в прямоугольной области S : 0 < x < a и 0 < y < b получим:
- функционал Лагранжа:
Ф л ( u , v )
E
2(1 - Ц2)
„ 6 и 6 v 1 - ц Г 6 и 6 v ) + 2ц — ■ / —+ — I
6 x 6 у 2 (6 у 6 x )
+ JJ ( Xu + Y v ) dx dy +
S
dxdy +
Для формирования коэффициентов жесткости a i j этой же системы уравнений составим вторую вариацию как вариацию первой вариации, реализуя (16) для дискретной задачи:
_6_Гу 6Ф Л (г7,5 1 11, 5 2г? ) к -1 6 и к ( i -1 6 и,

, x - a у - b
+ J (^xu + T‘xyv) dy у-0 x-0
1, при к - i ;
0, при к ^ i ,
I 1, при l - j ;
5 1 и , - s [ 0, при l ^ j ,
- его вариацию
5ФЛ - 5,ФЛ E— х
Л 1 Л (1 - ц2)
6 и 6 5 . v 6 v 6 5 . и |
1I + 6 x 6 у 6 у 6 x )
i - 1,2, ..., р ; j - 1,2, ..., р .
x JJ
S
6 и 6 5 . и 6 v 6 5 . v
---1----+ Ц
6 x 6 x 6 у 6 у
1 - ц (6 и 6 v |Г 65. и 65. v |
+^Я —+ — II -г1- + -г1- I
2 (6 у 6 x )( 6 у 6 x )
+ JJ ( X 5 и + Y 5 v ) dxdy +
S
+ J ( g* 5v + тУx5и) dx x-0 у-0
- и вторую вариацию функционала
52Ф л - 5 2 (5 1 ЭЛ) -- . E l | (1 -Ц )7
dxdy +
6 5 и 65. и
—2--— +
6 x 6 x
65, v 65. v Г 65, и 65. v 65. и 65, v ]
+ —2--— + ц | —2--— + —1--— I +
6 у 6 у ( 6 x 6 у 6 x 6 у )
1 - Ц Г 6 52 и + 6 52 v Y 6 5 1 и + 6 5 1 v
2 (6 у 6 x )( 6 у 6 x
dxdy .
Следует к (14)-(16) добавить главные граничные условия: и - и * , v - v * , 5iu - 5 iu * , 5 i v - 5 i v * , i - 1,2 (заданные значения отмечены символом «*»). В (14)(16) g x , т X y , g * , т У x - заданные напряжения.
Алгоритм формирования матриц жесткости и правых частей плоской задачи теории упругости в перемещениях. Таким образом, для решения краевой задачи (3), (4) вариационно-разностным методом применяем 5Ф Л - 5 1 Ф Л - 0 , что сообщает функционалу (14) минимальное значение. Рассмотрим приложение формул (15) и (16) для формирования системы разрешающих уравнений с целью вычисления перемещений и - и ( x , у ), v - v ( x , у ) пластины. Пусть и - ( и 1 , и 2,..., ир ) - вектор перемещений для р переменных, а 5 1 и - (5 1 и 1 ,5 1 и 2,...,5 1 ир ) и 52 и - (52 и 1 , 52 и 2, ...,52 ир )-вариации вектора перемещений. Тогда для вычисления коэффициентов b i вектора правой части системы разрешающих уравнений запишем (15) в виде
Е Р 6Фл ( и , 51 и ) т --------------- 5. и
*
l -1 6 и1
i - 1,2, ..., р ;
I 1, при l - i ;
5 1 и , - s
[ 0, при l ^ i .
Решение сформированной системы уравнений aij1 l j - b i дает вектор перемещений и j , по компонентам которого вычисляются внутренние усилия Nx , Уу , S„, согласно (2). xy
Преобразования дифференциальных уравнений продольно-поперечного изгиба в интегральные уравнения. Для преобразования дифференциальной формулировки задачи (1) в интегральную формулировку воспользуемся уравнениями равновесия, полученными по деформируемой схеме в [3]:
6 Q x + 6 Qy + N 6 2 w ( x , у ) + N 6 2 w ( x , у ) +
6x 6у x 6x2 у6
+ ( ^ у + Syx ) 6 w ( x , у ) + qz ( x , у )- 0 ,
' '6
п 6 мх 6 H yx 6 М у 6
Q, - + , Q,. - у +
6x 6у 6у6
На основании (19) составим вариационное уравнение
JJ
s
62 Mx 62 Hyx 62 Hxy 62 Му6
-----;--1---1---1--;--+ Nx
6x2 6x 6у 6x 6у 6у2
62 w c \ 62 w
+ NУ "TT + ( Sxy + Syx )УУ + q z
6 у v ' 6 x 6 у
5 wdS - 0,
где Mx - D (жх + ц$ ), M - D (ж + цжх ), H - H - x xy yyxxyyx
- ( 1 - Ц ) D X xy
ж
x
6 2 w
"йх2 ’
ж у
изгибающие и крутящие моменты;
62 w ау7 ’
χ xy
6 2 w
6 x 6 у ’
У, - 6 w / 6 x , x
Э у -6 w / 6 у - кривизны кривой линии и углы поворота; 5 w ( x , у ) - возможное перемещение базисной по
верхности пластины; dS - dxdy . Считая внутренние
силы Nx , N)J , Sxy известными функциями, выполнив процедуры интегрирования внутренних произведений в интеграле (20) по частям, получим вариационное уравнение
x - а у - b
5ЭЛ - J J D [ ж x 5ж x + Ц (ж x 5ж у + ж у 5ж x ) + ж у 5ж у + x -0 у -0
x - а у - b
+ 2 (1 - Ц) X xy 5X xy ] dxdy - J J qz 5 wdxdy - x-0 у-о
,x у - b
-J( Rx 5 w - Mx 5Sx) dy- у-0
- J (Ry 5w - My 5Sy) dx x=0
+ (Я + ЯJ6wlx=a |y=b + x xy yx/ lx=0l x = a y=b
+ J J ( N x S x 5 S x + Ny S y5 S y + S xy ( S y 5 S x + S x 5 S y ) ) dxdy - x =0 y =0
-J( NxSx + SxySy) 6 wdy- y=0
x = a
-J( SyxSx + NySy) 5 wdx = 0,(21)
x=0
где 5 - оператор варьирования; Rx = Qx + d Hxy 1 5 y , Ry = Qy + d Hyx I d x - реакции. Из (21) следуют функционал Лагранжа
1 x=a y=b
Э Л х J J D Г$2 + 2ц ® x $ y + $2 + 2 ( 1 - Ц ) X x ] dx dy -
2 x =0 y =0
J
, ,x
У = bУ
J qwdxdy-J (Rxw-Mx»,)dy y=0 У=0
x=a
-J( RyW - MySy ) dx ■ ( H ■ Hyx ) W|x =0 |y = 0 + x=0
। x = a y = b
+ 7 J J ( N S + N y S y 2 + 2 S xy S y S x ) dxdy -
2 x =0 y =0
- J(NxSx + SxySy) wdy y=0 x=0
- J( SyxSx + NySy) wdx x=0 y =0
и вторая вариация этого функционала
62Э = = = D Г б $ 5 $ + ц(5 $ 5 $ + 5 $ 5 $ ) + J! | 2 x 1 x * ' 2 x 1 y 2 y 1 x *
x =0 y =0
+ 52$ у 51$ у + 2 (1 - И ) 52X xy 51X xy ] dxdy + x = a y=b
+ J J( Nx 52Sx 5S + Ny 52Sy 5Д + x=0 y=0
+ S xy (5 2 S y 5 Д + 5 2 S x 5 Д ) ) dxdy , (23)
где 5 i , i = 1, 2, - операторы варьирования;
|
, „ d25 i w |
. „ d25 i w |
. d2 5 i w |
|
5 ^$ , i x d x x |
i $ y d y 2 , |
5 i X xy d x d y |
5 i S x = d 5 i w I d x , 5 i S y = d 5 i wI d y - вариации кривизны линий и вариации углов поворота.
Формирование матриц жесткости и матриц внутренних усилий проблемы устойчивости. На основании (9) выражение (23) приравняем к нулю, что приводит к постановке задачи устойчивости дискретной задачи. Пусть w = (w1,w2, ...,wp) - вектор перемещений для p переменных, а 51 tw = (51 w1, 51 w2, ...,51 wp) и 52-w = (52w1,52w2, ...,52wp) - вариации вектора перемещений. Сформируем для дискретной задачи систему (12) подобно (18):
^5 _df y д ЭЛ ( >w , 5 1 tw , 52 - w ) k =1 dtw k ( i =1 dtw ,
51 w l P 2 w k = 0 ,
_ I 1, при k = i ;
5 2 wk = S
[0, при k * i, i = 1, 2, ..., p ;
_ 1 1, при l = j ;
5 1 w l = S
[ 0, при l * j, j = 1, 2, ..., p .
Здесь каждый коэффициент C j = B ij - sA ij , согласно (23), содержит характеристики жесткости ( A ij ) и внутренних усилий ( B ij ); s - корни уравнения (12). Умножив найденные из (24) C ij на вектор w j , получим C j w j = 0, (25)
что представляет формулировку обобщенной проблемы собственных значений
[ B ] { w } = s [ A ] { w } , (26)
где [ B ] назовем матрицей внутренних усилий; [ A ] -матрица жесткости; { w } = ( w 1 , w 2, ..., wp ) - собственный вектор для p переменных; s - собственные числа.
Дискретизация дифференциальных операторов конечно-разностными аналогами и аппроксимация континуальной области сеточной. Выполним дискретизацию уравнений (15), (16), (23). Выберем на области пластинки прямоугольную равномерную сетку Юу ={(x = iXx, yj = jXy), i = 0,1,...,m, j = 0,1, ...,n} на отрезках [0, lx ] и [0, ly ]. Здесь x = xi и y = yj -узлы сетки; X, = / I m и X„ = L, I n - шаг сетки, а L xx yy x и ly - размеры пластинки по направлениям осей координат x и y. Эту сетку (рис. 1) с узлами i, j назовем основной сеткой. Введем дополнительную сетку с узлами ^, П: Ю^п ={( x 5 = X xI2 + iX x, yj = X y I2 + jX y X i = 0, 1,...,m-1, j = 0, 1, ...,n-1}. Интегралы по области в (15) и (16) и второй интеграл от внутренних усилий в (23) заменим численным интегрированием JJ( )dxdy = £^2( )S«п (здесь S- площадка S «=1 п=1
интегрирования, равная X x X y во внутренних узлах области пластины), а дифференциальные операторы заменим конечно-разностными аналогами [16]:
Г d 5 k u ^ = 5 k u i +1, j +1 + 5 k u i +1, j - 5 k u i , j +1 - 5 k u i , j
I dx J5,n " 2 Xx’
Г d 5 k V ) = 5 k v i +1, j +1 + 5 k v i , j +1 - 5 k v i +1, j - 5 k v i , j
Idy J " 2X„,
V x k «,п
Г d 5 k U + d 5 k V ) = 5 kui +1, j +1 + 5 kui , j +1 - 5 kui +1, j - 5 kui , j +
I dy dx L
«,п vk it+1,j +1 1 ^k^i +1,j ^k^i,j+1 vk it,j
I
2X x
Далее, в первом интеграле (23) интегрирование для членов, содержащих вариации кривизны δkæx и δkæy, заменим суммированием по узлам основной mn сетки JJ( )dxdy = ^^( )Sij и применим централь-S i=1 j =1
ные разности. Здесь площадки интегрирования Si , j равны: λ x λ y – во внутренних узлах области пластины; λ x λ y /2 – в узлах, расположенных на контуре; λ x λ y /4 – в узлах, расположенных в углах пластинки:
f d 2 5 k w ) = 8 k w i+1,j - 25 k w i,j + 5 k w i-1,j
I dx2 J. " X2
i,j f d25kw) = 5kwi,j+i - 25kwi,j + 5kw,j—1
I dy2 Ji,j= X2•
Кривизну кручения δ k χ xy вычислим в узлах типа ξ, j :
f d 2 5 k w J = 5 k w i +1, j +i - 5 k u i , j +i + 5 k u i,j —1 - 5 k u i +1, j
6x 5y J
ξ,j и в узлах типа i, η:
f d 2 5 k w ) = 5 k w i +1, j +1 - 5 k u i —1, j +1 + 5 k u i-1,j - 5 k u i +1, j
[ dxdy j. " 2X.X,.
i,η
Здесь k = 1,2.
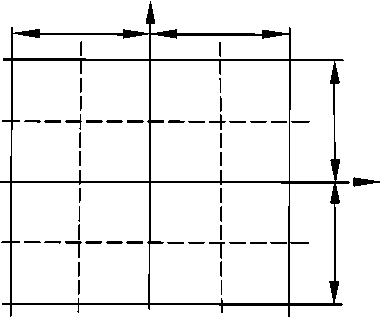
Рис. 1. Конечно-разностная сетка: сплошными линиями обозначены линии основной сетки; штриховыми линиями обозначены линии дополнительной сетки
Примеры расчета. Для расчета продольнопоперечного изгиба тонких пластин используем математический пакет Maple [17], позволяющий вычислять собственные числа и собственные значения матриц. Приведем два примера расчета устойчивости от сил инерции.
Пример 1. Пластина жестко защемлена по всему контуру; объемные силы равны X = рax = 1 и Y = рay = 0 . Размеры в плане: lx = 0,8 м; ly = 0,6 м; толщина h = 0,01 м. Материал пластинки имеет характеристики жесткости: E = 1010 Па и р = 0,45 . Плотность материала р = 3 г/см3. Пусть допускаемое ускорение [a] равно 50 g.
Первый этап расчета включает в себя вычисление внутренних мембранных усилий (2), эпюры которых приведены на рис. 2. По найденным перемещениям базисной поверхности пластины (рис. 3) построим ее деформированный вид (рис. 3, а ). Решение обобщенной проблемы собственных значений (26) (это второй этап расчета) представляет первая форма поперечного изгиба (рис. 3, б ).
в
Рис. 2. Эпюры внутренних усилий: а – продольные Nx ; б – продольные Ny ; в – сдвиговые Sxy (размерность внутренних усилий Н/м)
б
Рис. 3. Деформированный вид поверхности пластины: а – перемещения линии сетки срединного слоя; б – выпучивание – первая равновесная форма
Инерционная нагрузка здесь такова, что формируемая матрица внутренних усилий имеет на главной диагонали нули и эта матрица не имеет обратной мат- рицы.
Найдем ускорение, отвечающее первому собст- венному значению, равному 304 Н/м3: ax
304 ρ
304 = iooo м/с2. Ускорение слишком велико 3 - 10 - 3
и, видимо, близко к ударным нагрузкам. Заключаем, что заданная пластина не потеряет устойчивость, так как полученное критическое ускорение, равное 100 g , меньше допускаемого [ a ] = 50 g .
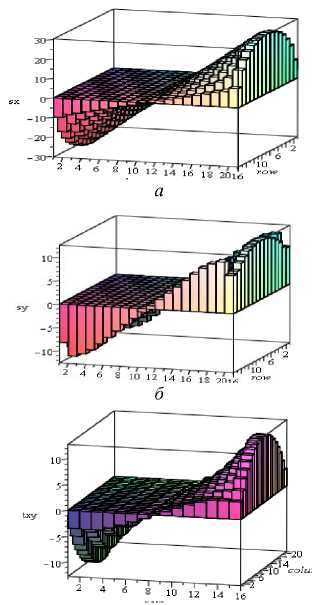
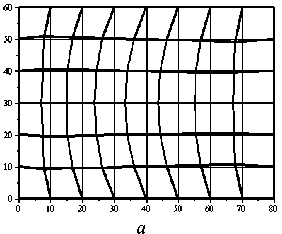
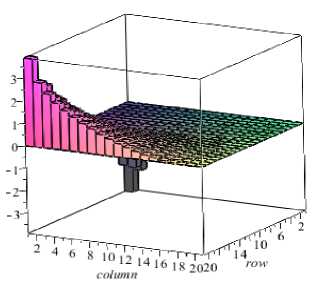
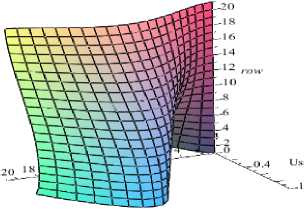
Пример 2 . В качестве второго примера рассмотрим пластину, закрепленную только с одного торца, когда три других края свободны и не закреплены. В ее плоскости действует постоянное ускорение. Аналогичная задача расчета продольно-поперечного изгиба была приведена в [2], где изучалось действие на вертикальную консольную пластинку постоянного ускорения; для решения задачи применен метод Ритца.
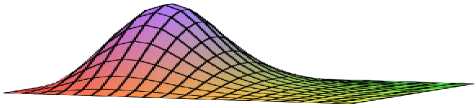
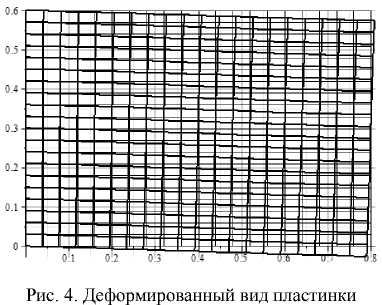
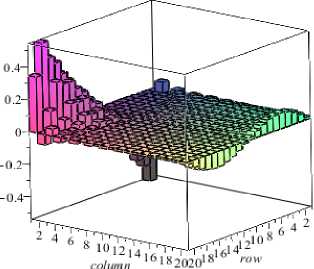
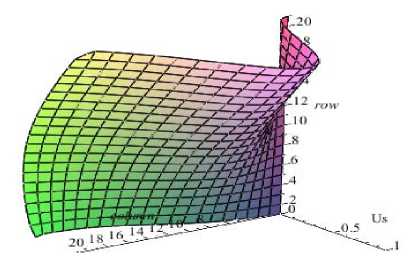
Пластина имеет размеры в плане 0,6×0,8 м и толщину 0,1·10–3 м; модуль Юнга материала равен 2·1011 Па; коэффициент Пуассона –0,25; плотность 780 кг/м3. Ускорение a y (это параметр) направлено по оси абсцисс. Требуется определить критические ускорения. На рис. 4 отображен деформированный вид, полученный на первом этапе решении задачи до возникновения критических ускорений. На рис. 5 приведен вид функций внутренних мембранных усилий, приводящих к потере устойчивости. На рис. 6 продемонстрированы полученные формы потери устойчивости пластины, там же отмечены четыре первых критических ускорения, соответствующих этим формам. Таким образом, чтобы достичь при разгоне ускорения, равного, к примеру, 41 м/с2, следует не допустить предыдущих критических ускорений 30 и 40 м/с2. Следует обратить внимание, что система Maple первое и четвертое собственные числа подобрала отрицательными и выдала соответствующие им формы (рис. 6, а , г ) в противоположном направлении. На первый взгляд, отрицательное значение собственного числа противоречит критерию потери устойчивости, что если минимальное собственное значение положительно, тогда конструкция устойчива. Здесь рассматривалась обобщенная проблема [ A ] { w } = 5 * [ B ] { w } ( 5* = 1/ 5 ). Если всегда [ A ] > 0, тогда больше нуля должно быть произведение 5 * [ B ] > 0 , а не собственное значение 5 * .
Дополнительно отметим в этой задаче особенность приложения вариационно-разностного подхода. На свободных краях пластины при формировании матриц жесткости записывались уравнения равновесия как в узлах на контуре, так и в законтурных узлах, поэтому размерности сформированных матриц [ A] и [B] в (26) не совпадали. Дополнительные уравнения о равенстве нулю изгибающих моментов и обобщенных реакций на контуре понижали размерность матрицы [A] до размерности матрицы [B]. Эти дополнительные процедуры сложения соответствующих строк между собой и столбцов матриц были автоматизированы для сеток различной густоты, что несколько усложняло общий алгоритм. Реализация же дифференциальной формулировки задачи (1) методом конечных разностей для пластины со свободными краями затруднительна.
б
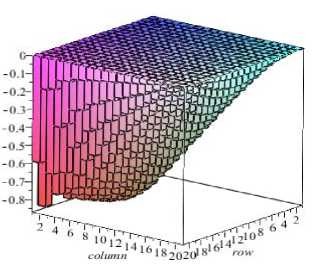
Рис. 5. Пространственный вид эпюр внутренних усилий: а – Nx ; б – Ny ; в – Sxy
а
в
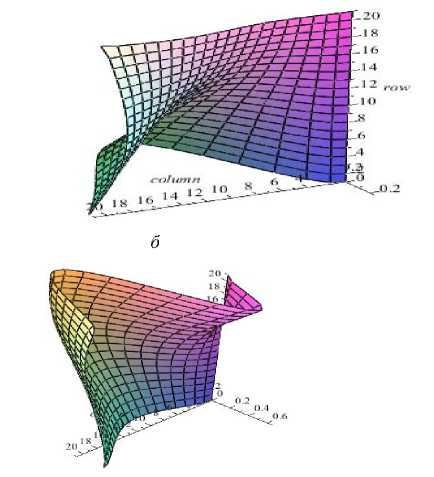
Рис. 6. Формы потери устойчивости при ускорениях: a – –29 м/с2; б – 30 м/с2; в – 40 м/с2; г – –43,3 м/с2
Заключение. Таким образом, рассмотренный подход к расчету пластин может быть использован для подбора и анализа геометрических и параметров жесткости панелей при заданном ускорении или торможении, применяемых в аэрокосмической технике.
Матрица жесткости и матрицы внутренних усилий формировались с помощью прикладной программы интерпретатора Maple, что ограничило возможности сгущения конечно-разностной сетки и численного решения задачи большой размерности, исследования сходимости результатов. Поэтому для дальнейших исследований желательно использование пакетов программ, основанных на алгоритмических языках высокого уровня.
Необходимо сказать, что на поиск всего спектра собственных чисел и форм программа Maple затрачивала на два порядка больше времени, по сравнению с временем формирования матриц с применением предложенных здесь методов. Для обеспечения достоверности был применен метод скалярных произведений, позволяющий вычислять максимальное собственное число. Однако это требовало вычисления обратной матрицы жесткости, тогда как матрицы внутренних усилий обратных матриц не имели.
Список литературы Приложение вариационно-разностного метода к расчету продольно-поперечного изгиба пластин силами инерции
- Szilard R. Theories and Applications of Plate Analysis: Classical, Numerical and Engineering Methods. Copyright © John Wiley & Sons, Inc., 2004. 1039 p.
- Xiang Y., Kitipornchai S., Wang C. Y. Buckling and spanning capacity of cantilevered vertical plates under body forces//The IES Journal. Part A: Civil & Structural Engineering. 2008. 1:2. Р. 116-122.
- Тимошенко С. П. Устойчивость упругих систем. М.-Л.: ОГИЗ-ГОСТЕХИЗДАТ, 1946. 532 с.
- Филоненко-Бородич М. М. Теория упругости. М.-Л.: Физматлит, 1947. 300 с.
- Тимошенко С. П., Гудьер Дж. Теория упругости. М.: Наука, 1975. 576 с.
- Сабиров Р. А. Особенности дифференциальной и вариационно-разностной формулировок задачи продольно-поперечного изгиба стержня от сил инерции//Вестник СибГАУ. 2014. № 3(55). С. 131-138.
- Яблонский А. А., Норейко С. С. Курс теории колебаний. М.: Высш. шк. 1966. 255 с.
- Васидзу К. Вариационные методы в теории упругости и пластичности: пер. с англ. М.: Мир, 1987. 542 с.
- Ван Цзи-де. Прикладная теория упругости. М.: Физматгиз, 1959. 400 с.
- Вольмир А. С. Устойчивость упругих систем. М.: Физматгиз, 1963. 880 с.
- Лейбензон Л. С. Курс теории упругости. М.-Л.: ОГИЗ, 1947. 465 с.
- Lopatin A. V., Morozov E. V. Approximate buckling analysis of the CCFF orthotropic plates subjected to in-plane bending//International Journal of Mechanical Sciences. 2014. № 85. Р. 38-44.
- Ланцош К. Вариационные принципы механики: пер. с англ. М.: Мир, 1965. 408 с.
- Новожилов В. В. Основы нелинейной теории упругости. М.-Л.: ОГИЗ-ГОСТЕХИЗДАТ, 1948. 112 с.
- Михлин С. Г. Вариационные методы в математической физике. М.: Наука, 1970. 512 с.
- Самарский А. А. Теория разностных схем. М.: Наука, 1977. 656 с.
- Матросов А. В. Maple 6. Решение задач высшей математики и механики. СПб.: БХВ-Петербург, 2001. 528 с
